进程间通信——信号
进程间通信——信号
- 1. 信号的概念
-
- 1.1 信号的机制
- 1.1 与信号相关的事件和状态
- 1.3 信号的编号
- 1.4 信号四要素
- 1.5 Linux常规信号一览表
- 2. 信号的产生方式
-
- 2.1 终端按键产生信号
- 2.2 硬件异常产生信号
- 2.3 kill函数/命令产生信号
- 2.4 raise和abort函数
- 2.5 软件条件产生信号
-
- 2.5.1 alarm函数
- 2.5.2 setitimer函数
- 3. 信号集操作函数
-
- 3.1 信号集设定
- 3.2 sigprocmask函数
- 3.3 sigpending函数
- 4. 信号捕捉
-
- 4.1 signal函数
- 4.2 sigaction函数(重点)
- 4.3 信号捕捉特性
- 4.4 内核实现信号捕捉过程:
- 5. 竞态条件(时序竞态):
-
- 5.1 pause函数
- 5.2 时序竞态
-
- 5.2.1 前导例
- 5.2.2 时序问题分析
- 5.2.3 解决时序问题
- 5.2.4 总结
- 5.3 全局变量异步I/O
- 5.4 可/不可重入函数
- 6. SIGCHLD信号
-
- 6.1 SIGCHLD的产生条件
- 6.2 借助SIGCHLD信号回收子进程
- 6.3 子进程结束status处理方式
- 6.4 SIGCHLD信号注意问题
- 7. 信号传参(了解)
-
- 7.1 发送信号传参
- 7.2 捕捉函数传参
- 8. 中断系统调用
1. 信号的概念
信号共性:1. 简单 2. 不能携带大量信息 3. 满足某个特设条件才发送。
Unix早期版本就提供了信号机制,但不可靠,信号可能丢失。Berkeley 和 AT&T都对信号模型做了更改,增加了可靠信号机制。但彼此不兼容。POSIX.1对可靠信号例程进行了标准化。
1.1 信号的机制
A给B发送信号,B收到信号之前执行自己的代码,收到信号后,不管执行到程序的什么位置,都要暂停运行,去处理信号,处理完毕再继续执行。与硬件中断类似——异步模式。但信号是软件层面上实现的中断,早期常被称为“软中断”。
信号的特质:由于信号是通过软件方法实现,其实现手段导致信号有很强的延时性。但对于用户来说,这个延迟时间非常短,不易察觉。
每个进程收到的所有信号,都是由内核负责发送的,内核处理。
1.1 与信号相关的事件和状态
产生信号:
- 按键产生,如:Ctrl+c、Ctrl+z、Ctrl+\
- 系统调用产生,如:kill、raise、abort
- 软件条件产生,如:定时器alarm
- 硬件异常产生,如:非法访问内存(段错误)、除0(浮点数例外)、内存对齐出错(总线错误)
- 命令产生,如:kill命令
递达:递送并且到达进程。
未决:产生和递达之间的状态。主要由于阻塞(屏蔽)导致该状态。
信号的处理方式:
- 执行默认动作
- 忽略(丢弃)
- 捕捉(调用户处理函数)
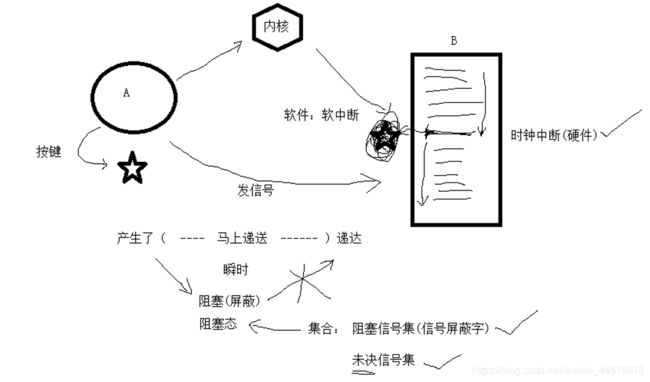
Linux内核的进程控制块PCB是一个结构体,task_struct, 除了包含进程id,状态,工作目录,用户id,组id,文件描述符表,还包含了信号相关的信息,主要指阻塞信号集和未决信号集。
阻塞信号集(信号屏蔽字):
将某些信号加入集合,对他们设置屏蔽,当屏蔽x信号后,再收到该信号,该信号的处理将推后(解除屏蔽后)
未决信号集:
- 信号产生,未决信号集中描述该信号的位立刻翻转为1,表信号处于未决状态。当信号被处理对应位翻转回为0。这一时刻往往非常短暂。
- 信号产生后由于某些原因(主要是阻塞)不能抵达。这类信号的集合称之为未决信号集。在屏蔽解除前,信号一直处于未决状态。

PCB 中包含了描述信号的信息,主要指阻塞信号集和未决信号集。它们都是集合(无序但不重复),1,2,3,4,5,…描述是信号的编号,里面的0101…描述的是信号的状态。
1.3 信号的编号
可以使用kill –l命令查看当前系统可使用的信号有哪些。
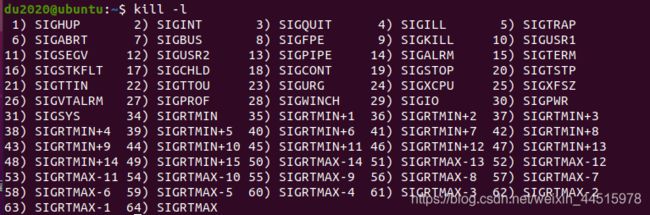
不存在编号为0的信号。**其中1-31号信号称之为常规信号(也叫普通信号或标准信号),34-64称之为实时信号,驱动编程与硬件相关。**名字上区别不大。而前32个名字各不相同。
1.4 信号四要素
与变量三要素类似的,每个信号也有其必备4要素,分别是:1. 编号 2. 名称 3. 事件 4. 默认处理动作
可通过man 7 signal查看帮助文档获取。也可查看/usr/src/linux-headers-3.16.0-30/arch/s390/include/uapi/asm/signal.h
| Signal | Value | Action | Comment |
|---|---|---|---|
| SIGHUP | 1 | Term | Hangup detected on controlling terminal or death of controlling process |
| SIGINT | 2 | Term | Interrupt from keyboard |
| SIGQUIT | 3 | Core | Quit from keyboard |
| SIGILL | 4 | Core | Illegal Instruction |
| SIGFPE | 8 | Core | Floating point exception |
| SIGKILL | 9 | Term | Kill signal |
| SIGSEGV | 11 | Core | Invalid memory reference |
| SIGPIPE | 13 | Term | Broken pipe: write to pipe with no readers |
| SIGALRM | 14 | Term | Timer signal from alarm(2) |
| SIGTERM | 15 | Term | Termination signal |
| SIGUSR1 | 30,10,16 | Term | User-defined signal 1 |
| SIGUSR2 | 31,12,17 | Term | User-defined signal 2 |
| SIGCHLD | 20,17,18 | Ign | Child stopped or terminated |
| SIGCONT | 19,18,25 | Cont | Continue if stopped |
| SIGSTOP | 17,19,23 | Stop | Stop process |
| SIGTSTP | 18,20,24 | Stop | Stop typed at terminal |
| SIGTTIN | 21,21,26 | Stop | Terminal input for background process |
| SIGTTOU | 22,22,27 | Stop | Terminal output for background process |
The signals SIGKILL and SIGSTOP cannot be caught, blocked, or ignored.
在标准信号中,有一些信号是有三个“Value”,第一个值通常对alpha和sparc架构有效,中间值针对x86、arm和其他架构,最后一个应用于mips架构。一个‘-’表示在对应架构上尚未定义该信号。
不同的操作系统定义了不同的系统信号。因此有些信号出现在Unix系统内,也出现在Linux中,而有的信号出现在FreeBSD或Mac OS中却没有出现在Linux下。这里我们只研究Linux系统中的信号。
默认动作:
- Term:终止进程
- Ign: 忽略信号 (默认即时对该种信号忽略操作)
- Core:终止进程,生成Core文件。(查验进程死亡原因, 用于gdb调试)
- Stop:停止(暂停)进程
- Cont:继续运行进程
注意从man 7 signal帮助文档中可看到 : The signals SIGKILL and SIGSTOP cannot be caught, blocked, or ignored.
这里特别强调了**9) SIGKILL 和19) SIGSTOP信号,不允许忽略和捕捉,只能执行默认动作。甚至不能将其设置为阻塞。**另外需清楚,只有每个信号所对应的事件发生了,该信号才会被递送(但不一定递达),不应乱发信号!!
1.5 Linux常规信号一览表
- SIGHUP: 当用户退出shell时,由该shell启动的所有进程将收到这个信号,默认动作为终止进程
- SIGINT:当用户按下了
作为终止进程。 - SIGQUIT:当用户按下
号。默认动作为终止进程。 - SIGILL:CPU检测到某进程执行了非法指令。默认动作为终止进程并产生core文件
- SIGTRAP:该信号由断点指令或其他 trap指令产生。默认动作为终止里程 并产生core文件。
- SIGABRT: 调用abort函数时产生该信号。默认动作为终止进程并产生core文件。
- SIGBUS:非法访问内存地址,包括内存对齐出错,默认动作为终止进程并产生core文件。
- SIGFPE:在发生致命的运算错误时发出。不仅包括浮点运算错误,还包括溢出及除数为0等所有的算法错误。默认动作为终止进程并产生core文件。
- SIGKILL:无条件终止进程。本信号不能被忽略,处理和阻塞。默认动作为终止进程。它向系统管理员提供了可以杀死任何进程的方法。
- SIGUSE1:用户定义 的信号。即程序员可以在程序中定义并使用该信号。默认动作为终止进程。
- SIGSEGV:指示进程进行了无效内存访问。默认动作为终止进程并产生core文件。
- SIGUSR2:另外一个用户自定义信号,程序员可以在程序中定义并使用该信号。默认动作为终止进程。
- SIGPIPE:Broken pipe向一个没有读端的管道写数据。默认动作为终止进程。
- SIGALRM: 定时器超时,超时的时间 由系统调用alarm设置。默认动作为终止进程。
- SIGTERM:程序结束信号,与SIGKILL不同的是,该信号可以被阻塞和终止。通常用来要示程序正常退出。执行shell命令Kill时,缺省产生这个信号。默认动作为终止进程。
- SIGSTKFLT:Linux早期版本出现的信号,现仍保留向后兼容。默认动作为终止进程。
- SIGCHLD:子进程结束时,父进程会收到这个信号。默认动作为忽略这个信号。
- SIGCONT:如果进程已停止,则使其继续运行。默认动作为继续/忽略。
- SIGSTOP:停止进程的执行。信号不能被忽略,处理和阻塞。默认动作为暂停进程。
- SIGTSTP:停止终端交互进程的运行。按下
- SIGTTIN:后台进程读终端控制台。默认动作为暂停进程。
- SIGTTOU: 该信号类似于SIGTTIN,在后台进程要向终端输出数据时发生。默认动作为暂停进程。
- SIGURG:套接字上有紧急数据时,向当前正在运行的进程发出些信号,报告有紧急数据到达。如网络带外数据到达,默认动作为忽略该信号。
- SIGXCPU:进程执行时间超过了分配给该进程的CPU时间 ,系统产生该信号并发送给该进程。默认动作为终止进程。
- SIGXFSZ:超过文件的最大长度设置。默认动作为终止进程。
- SIGVTALRM:虚拟时钟超时时产生该信号。类似于SIGALRM,但是该信号只计算该进程占用CPU的使用时间。默认动作为终止进程。
- SGIPROF:类似于SIGVTALRM,它不公包括该进程占用CPU时间还包括执行系统调用时间。默认动作为终止进程。
- SIGWINCH:窗口变化大小时发出。默认动作为忽略该信号。
- SIGIO:此信号向进程指示发出了一个异步IO事件。默认动作为忽略。
- SIGPWR:关机。默认动作为终止进程。
- SIGSYS:无效的系统调用。默认动作为终止进程并产生core文件。
- SIGRTMIN ~ (64) SIGRTMAX:LINUX的实时信号,它们没有固定的含义(可以由用户自定义)。所有的实时信号的默认动作都为终止进程。
2. 信号的产生方式
2.1 终端按键产生信号
Ctrl + C → 2) SIGINT(终止/中断) "INT" ----Interrupt
Ctrl + Z → 20) SIGTSTP(暂停/停止) "T" ----Terminal 终端。
Ctrl + \ → 3) SIGQUIT(退出)
2.2 硬件异常产生信号
除0操作 → 8) SIGFPE (浮点数例外) "F" -----float 浮点数。
非法访问内存 → 11) SIGSEGV (段错误)
总线错误 → 7) SIGBUS
2.3 kill函数/命令产生信号
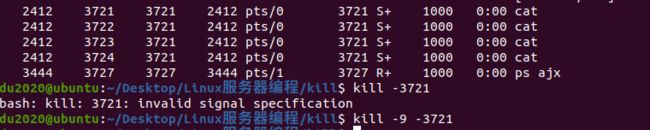
kill命令产生信号:kill -SIGKILL pid
kill函数:int kill(pid_t pid, int sig);给指定进程发送指定信号(不一定杀死)
- 成功:0;失败:-1 (ID非法,信号非法,普通用户杀init进程等权级问题),设置errno
- sig:不推荐直接使用数字,应使用宏名,因为不同操作系统信号编号可能不同,但名称一致。
- pid > 0: 发送信号给指定的进程。
- pid = 0: 发送信号给 与调用kill函数进程属于同一进程组的所有进程。
- pid < 0: 取|pid|发给对应进程组。
- pid = -1:发送给进程有权限发送的系统中所有进程。
进程组:每个进程都属于一个进程组,进程组是一个或多个进程集合,他们相互关联,共同完成一个实体任务,每个进程组都有一个进程组长,默认进程组ID与进程组长ID相同。
权限保护:super用户(root)可以发送信号给任意用户,普通用户是不能向系统用户发送信号的。 kill -9 (root用户的pid) 是不可以的。同样,普通用户也不能向其他普通用户发送信号,终止其进程。 只能向自己创建的进程发送信号。普通用户基本规则是:发送者实际或有效用户ID == 接收者实际或有效用户ID
练习:循环创建5个子进程,任一子进程用kill函数终止其父进程。
#include kill SIGKILL -用户组PID杀死用户组所有进程
![]()
2.4 raise和abort函数
raise 函数:给当前进程发送指定信号(自己给自己发) raise(signo) == kill(getpid(), signo);
int raise(int sig); 成功:0,失败非0值
abort 函数:给自己发送异常终止信号 6) SIGABRT 信号,终止并产生core文件
void abort(void); 该函数无返回
2.5 软件条件产生信号
2.5.1 alarm函数
- 设置定时器(闹钟)。在指定seconds后,内核会给当前进程发送14)SIGALRM信号。进程收到该信号,默认动作终止。
- 每个进程都有且只有唯一个定时器。
unsigned int alarm(unsigned int seconds);返回0或剩余的秒数,无失败。
常用:取消定时器alarm(0),返回旧闹钟余下秒数。
例:alarm(5) → 3sec → alarm(4) → 5sec → alarm(5) → alarm(0)
返回0 ————————————>返回2 ————————————>返回0——————>返回5;
定时,与进程状态无关(自然定时法)!就绪、运行、挂起(阻塞、暂停)、终止、僵尸…无论进程处于何种状态,alarm都计时。
练习:编写程序,测试你使用的计算机1秒钟能数多少个数。
#include 使用time命令:time ./a.out查看程序执行的时间。 程序运行的瓶颈在于IO,优化程序,首选优化IO。
实际执行时间 = 系统时间 + 用户时间 + 等待时间 (等待其他系统资源所消耗的时间)
2.5.2 setitimer函数
- 设置定时器(闹钟)。 可代替alarm函数。精度微秒us,可以实现周期定时。
int setitimer(int which, const struct itimerval *new_value, struct itimerval *old_value);- 成功:0;失败:-1,设置errno
- 参数:
- which:指定定时方式
- ① 自然定时:ITIMER_REAL → 14)SIGLARM 计算自然时间
- ② 虚拟空间计时(用户空间):ITIMER_VIRTUAL → 26)SIGVTALRM 只计算进程占用cpu的时间
- ③ 运行时计时(用户+内核):ITIMER_PROF → 27)SIGPROF 计算占用cpu及执行系统调用的时间
- new_value:传入参数,为重新设定的秒数
- old_value:传出参数,上个定时器剩余的秒数
- which:指定定时方式
//参数
struct itimerval {
struct timeval it_interval; /* Interval for periodic timer */
struct timeval it_value; /* Time until next expiration */
};
struct timeval {
time_t tv_sec; /* seconds */ //秒
suseconds_t tv_usec; /* microseconds */ //微秒
};
//相当于以下结构体
struct itimerval{
struct timeval it_interval{
it_terval.tv_sec;
it_interval.tv_usec;
}it_interval;
struct timeval it_interval{
it_value.tv_sec;
it_value.tv_usec;
}it_value;
}it,oldit;
练习: 使用setitimer函数实现alarm函数,重复计算机1秒数数程序。
#include - it_interval:用来设定两次定时任务之间间隔的时间。
- it_value:定时的时长
- 两个参数都设置为0,即清0操作。
#include 第一次打印是5s,之后打印是间隔3s
3. 信号集操作函数
内核通过读取未决信号集来判断信号是否应被处理。(阻塞信号集)信号屏蔽字mask可以影响未决信号集。而我们可以在应用程序中自定义set来改变mask。已达到屏蔽指定信号的目的。
3.1 信号集设定
| 函数 | 功能 | 返回值 |
|---|---|---|
sigset_t set; |
typedef unsigned long sigset_t; | |
int sigemptyset(sigset_t *set); |
将某个信号集清0 | 成功:0;失败:-1 |
int sigfillset(sigset_t *set); |
将某个信号集置1 | 成功:0;失败:-1 |
int sigaddset(sigset_t *set, int signum); |
将某个信号加入信号集 | 成功:0;失败:-1 |
int sigdelset(sigset_t *set, int signum); |
将某个信号清出信号集 | 成功:0;失败:-1 |
int sigismember(const sigset_t *set, int signum); |
判断某个信号是否在信号集中 | 返回值:在集合:1;不在:0;出错:-1 |
sigset_t类型的本质是位图。但不应该直接使用位操作,而应该使用上述函数,保证跨系统操作有效。
3.2 sigprocmask函数
- 用来屏蔽信号、解除屏蔽也使用该函数。其本质,读取或修改进程的信号屏蔽字(PCB中)
- 严格注意,屏蔽信号:只是将信号处理延后执行(延至解除屏蔽);而忽略表示将信号丢处理。
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);- 成功:0;失败:-1,设置errno
- 参数:
- set:传入参数,是一个位图,set中哪位置1,就表示当前进程屏蔽哪个信号。
- oldset:传出参数,保存旧的信号屏蔽集。
- how参数取值: 假设当前的信号屏蔽字为mask
- SIG_BLOCK: 当how设置为此值,set表示需要屏蔽的信号。相当于 mask = mask|set
- SIG_UNBLOCK: 当how设置为此,set表示需要解除屏蔽的信号。相当于 mask = mask & ~set
- SIG_SETMASK: 当how设置为此,set表示用于替代原始屏蔽及的新屏蔽集。相当于 mask = set若,调用sigprocmask解除了对当前若干个信号的阻塞,则在sigprocmask返回前,至少将其中一个信号递达。
3.3 sigpending函数
- 读取当前进程的未决信号集
- int sigpending(sigset_t *set); set传出参数
- 返回值:成功:0;失败:-1,设置errno
练习:把所有常规信号的未决状态打印至屏幕。
#include 4. 信号捕捉
4.1 signal函数
注册一个信号捕捉函数:
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);
该函数由ANSI定义,由于历史原因在不同版本的Unix和不同版本的Linux中可能有不同的行为。因此应该尽量避免使用它,取而代之使用sigaction函数。
void (*signal(int signum, void (*sighandler_t)(int))) (int);
能看出这个函数代表什么意思吗? 注意多在复杂结构中使用typedef。
#include 4.2 sigaction函数(重点)
修改信号处理动作(通常在Linux用其来注册一个信号的捕捉函数)
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);
- 成功:0;失败:-1,设置errno
- 参数:
- act:传入参数,新的处理方式。
- oldact:传出参数,旧的处理方式。
struct sigaction结构体
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t *, void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};
- sa_restorer:该元素是过时的,不应该使用,POSIX.1标准将不指定该元素。(弃用)
- sa_sigaction:当sa_flags被指定为SA_SIGINFO标志时,使用该信号处理程序。(很少使用)
- 重点掌握:
- ① sa_handler:指定信号捕捉后的处理函数名(即注册函数)。也可赋值为SIG_IGN表忽略 或 SIG_DFL表执行默认动作
- ② sa_mask: 调用信号处理函数时,所要屏蔽的信号集合(信号屏蔽字)。注意:仅在处理函数被调用期间屏蔽生效,是临时性设置。
- ③ sa_flags:通常设置为0,表使用默认属性。
4.3 信号捕捉特性
- 进程正常运行时,默认PCB中有一个信号屏蔽字,假定为☆,它决定了进程自动屏蔽哪些信号。当注册了某个信号捕捉函数,捕捉到该信号以后,要调用该函数。而该函数有可能执行很长时间,在这期间所屏蔽的信号不由☆来指定。而是用sa_mask来指定。调用完信号处理函数,再恢复为☆。
- XXX信号捕捉函数执行期间,XXX信号自动被屏蔽。
- 阻塞的常规信号不支持排队,产生多次只记录一次。(后32个实时信号支持排队)
为某个信号(ctrl+c)设置捕捉函数
#include 验证在信号处理函数执行期间,该信号多次递送,那么只在处理函数之行结束后,处理一次。
验证sa_mask在捕捉函数执行期间的屏蔽作用。
#include 第一次执行ctrl+c时,此信号被捕捉,然后执行信号捕捉函数。执行捕捉函数期间,信号ctrl+c多次递送,但是只在处理函数结束后处理一次。捕捉函数执行期间递送屏蔽信号ctrl+\,并不执行该信号,只在函数结束后执行默认动作。

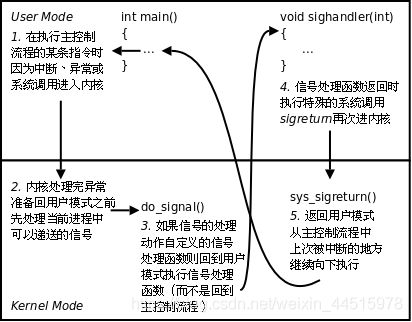
4.4 内核实现信号捕捉过程:
5. 竞态条件(时序竞态):
5.1 pause函数
- 调用该函数可以造成进程主动挂起,等待信号唤醒。调用该系统调用的进程将处于阻塞状态(主动放弃cpu) 直到有信号递达将其唤醒。
- int pause(void); 返回值:-1 并设置errno为EINTR
- 返回值:
- ① 如果信号的默认处理动作是终止进程,则进程终止,pause函数么有机会返回。
- ② 如果信号的默认处理动作是忽略,进程继续处于挂起状态,pause函数不返回。
- ③ 如果信号的处理动作是捕捉,则【调用完信号处理函数之后,pause返回-1】
- ④ pause收到的信号不能被屏蔽,如果被屏蔽,那么pause就不能被唤醒。
- errno设置为EINTR,表示“被信号中断”。想想我们还有哪个函数只有出错返回值。
- 返回值:
使用pause和alarm来实现sleep函数。
#include 注意,unslept = alarm(0)的用法。清除闹钟,提高程序健壮性
例如:睡觉,alarm(10)闹铃。
正常: 10后闹铃将我唤醒,这时额外设置alarm(0)取消闹铃,不会出错。
异常: 5分钟,被其他事物吵醒,alarm(0)取消闹铃防止打扰。
5.2 时序竞态
5.2.1 前导例
设想如下场景:
欲睡觉,定闹钟10分钟,希望10分钟后闹铃将自己唤醒。
正常:定时,睡觉,10分钟后被闹钟唤醒。
异常:闹钟定好后,被唤走,外出劳动,20分钟后劳动结束。回来继续睡觉计划,但劳动期间闹钟已经响过,不会再将我唤醒。
5.2.2 时序问题分析
回顾,借助pause和alarm实现的mysleep函数。设想如下时序:
1. 注册SIGALRM信号处理函数 (sigaction…)
2. 调用alarm(1) 函数设定闹钟1秒。
3. 函数调用刚结束,开始倒计时1秒。当前进程失去cpu,内核调度优先级高的进程(有多个)取代当前进程。当前进程无法获得cpu,进入就绪态等待cpu。
4. 1秒后,闹钟超时,内核向当前进程发送SIGALRM信号(自然定时法,与进程状态无关),高优先级进程尚未执行完,当前进程仍处于就绪态,信号无法处理(未决)
5. 优先级高的进程执行完,当前进程获得cpu资源,内核调度回当前进程执行。SIGALRM信号递达,信号设置捕捉,执行处理函数sig_alarm。
6. 信号处理函数执行结束,返回当前进程主控流程,pause()被调用挂起等待。(欲等待alarm函数发送的SIGALRM信号将自己唤醒)
7. SIGALRM信号已经处理完毕,pause不会等到。
5.2.3 解决时序问题
可以通过设置屏蔽SIGALRM的方法来控制程序执行逻辑,但无论如何设置,程序都有可能在“解除信号屏蔽”与“挂起等待信号”这个两个操作间隙失去cpu资源。除非将这两步骤合并成一个“原子操作(不可再分的:系统调用)”。sigsuspend函数具备这个功能。在对时序要求严格的场合下都应该使用sigsuspend替换pause。
int sigsuspend(const sigset_t *mask); 挂起等待信号。
sigsuspend函数调用期间,进程信号屏蔽字由其参数mask指定。
可将某个信号(如SIGALRM)从临时信号屏蔽字mask中删除,这样在调用sigsuspend时将解除对该信号的屏蔽,然后挂起等待,当sigsuspend返回时,进程的信号屏蔽字恢复为原来的值。如果原来对该信号是屏蔽态,sigsuspend函数返回后仍然屏蔽该信号。
改进版mysleep【sigsuspend】
#include 5.2.4 总结
竞态条件,跟系统负载有很紧密的关系,体现出信号的不可靠性。系统负载越严重,信号不可靠性越强。
不可靠由其实现原理所致。信号是通过软件方式实现(跟内核调度高度依赖,延时性强),每次系统调用结束后,或中断处理处理结束后,需通过扫描PCB中的未决信号集,来判断是否应处理某个信号。当系统负载过重时,会出现时序混乱。
这种意外情况只能在编写程序过程中,提早预见,主动规避,而无法通过gdb程序调试等其他手段弥补。且由于该错误不具规律性,后期捕捉和重现十分困难。
5.3 全局变量异步I/O
分析如下父子进程交替数数程序。当捕捉函数里面的sleep取消,程序即会出现问题。请分析原因。
#include 示例中,通过flag变量标记程序实行进度。flag置1表示数数完成。flag置0表示给对方发送信号完成。
问题出现的位置,在父子进程kill函数之后需要紧接着调用 flag,将其置0,标记信号已经发送。但,在这期间很有可能被kernel调度,失去执行权利,而对方获取了执行时间,通过发送信号回调捕捉函数,从而修改了全局的flag。
如何解决该问题呢?可以使用后续课程讲到的“锁”机制。当操作全局变量的时候,通过加锁、解锁来解决该问题。
现阶段,我们在编程期间如若使用全局变量,应在主观上注意全局变量的异步IO可能造成的问题。
5.4 可/不可重入函数
一个函数在被调用执行期间(尚未调用结束),由于某种时序又被重复调用,称之为“重入”。根据函数实现的方法可分为“可重入函数”和“不可重入函数”两种。看如下时序。
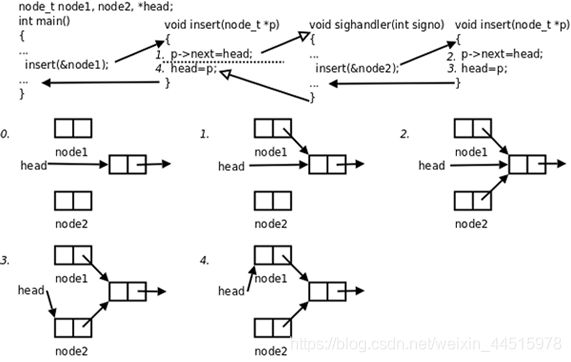
显然,insert函数是不可重入函数,重入调用,会导致意外结果呈现。究其原因,是该函数内部实现使用了全局变量。
注意事项:
- 定义可重入函数,函数内不能含有全局变量及static变量,不能使用malloc、free
- 信号捕捉函数应设计为可重入函数
- 信号处理程序可以调用的可重入函数可参阅man 7 signal
- 没有包含在上述列表中的函数大多是不可重入的,其原因为:
a) 使用静态数据结构
b) 调用了malloc或free
c) 是标准I/O函数
6. SIGCHLD信号
6.1 SIGCHLD的产生条件
- 子进程终止时
- 子进程接收到SIGSTOP信号停止时
- 子进程处在停止态,接受到SIGCONT后唤醒时
6.2 借助SIGCHLD信号回收子进程
子进程结束运行,其父进程会收到SIGCHLD信号。该信号的默认处理动作是忽略。可以捕捉该信号,在捕捉函数中完成子进程状态的回收。
#include 结合 17)SIGCHLD 信号默认动作,掌握父使用捕捉函数回收子进程的方式。
如果每创建一个子进程后不使用sleep可以吗?可不可以将程序中,捕捉函数内部的while替换为if?为什么? if ((pid = waitpid(0, &status, WNOHANG)) > 0) { … }
不能替换为if ,因为内核是根据未决信号集来处理信号,如果一个信号重复发送,信号只会记录一次,可能其他信号不会被处理,所以会产生僵尸进程
思考:信号不支持排队,当正在执行SIGCHLD捕捉函数时,再过来一个或多个SIGCHLD信号怎么办?用while处理
6.3 子进程结束status处理方式
pid_t waitpid(pid_t pid, int *status, int options)
| options | 说明 |
|---|---|
| WNOHANG | 没有子进程结束,立即返回 |
| WUNTRACED | 如果子进程由于被停止产生的SIGCHLD,waitpid则立即返回 |
| WCONTINUED | 如果子进程由于被SIGCONT唤醒而产生的SIGCHLD,waitpid则立即返回 |
| 获取status | 说明 |
|---|---|
| WIFEXITED(status) | 子进程正常exit终止,返回真 |
| WEXITSTATUS(status) | 返回子进程正常退出值 |
| WIFSIGNALED(status) | 子进程被信号终止,返回真 |
| WTERMSIG(status) | 返回终止子进程的信号值 |
| WIFSTOPPED(status) | 子进程被停止,返回真 |
| WSTOPSIG(status) | 返回停止子进程的信号值 |
| WIFCONTINUED(status) | 子进程接收到SIGCONT信号继续执行 |
6.4 SIGCHLD信号注意问题
- 子进程继承了父进程的信号屏蔽字和信号处理动作,但子进程没有继承未决信号集spending。
- 注意注册信号捕捉函数的位置。
- 应该在fork之前,阻塞SIGCHLD信号。注册完捕捉函数后解除阻塞。
7. 信号传参(了解)
7.1 发送信号传参
sigqueue函数对应kill函数,但可在向指定进程发送信号的同时携带参数
int sigqueue(pid_t pid, int sig, const union sigval value);成功:0;失败:-1,设置errno
union sigval {
int sival_int;
void *sival_ptr;
};
向指定进程发送指定信号的同时,携带数据。但,如传地址,需注意,不同进程之间虚拟地址空间各自独立,将当前进程地址传递给另一进程没有实际意义。
7.2 捕捉函数传参
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t *, void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};
当注册信号捕捉函数,希望获取更多信号相关信息,不应使用sa_handler而应该使用sa_sigaction。但此时的sa_flags必须指定为SA_SIGINFO。siginfo_t是一个成员十分丰富的结构体类型,可以携带各种与信号相关的数据。
8. 中断系统调用
系统调用可分为两类:慢速系统调用和其他系统调用。
- 慢速系统调用:可能会使进程永远阻塞的一类。如果在阻塞期间收到一个信号,该系统调用就被中断,不再继续执行(早期);也可以设定系统调用是否重启。如,read、write、pause、wait…
- 其他系统调用:getpid、getppid、fork…
结合pause,回顾慢速系统调用:
慢速系统调用被中断的相关行为,实际上就是pause的行为: 如,read
- ① 想中断pause,信号不能被屏蔽。
- ② 信号的处理方式必须是捕捉 (默认、忽略都不可以)
- ③ 中断后返回-1, 设置errno为EINTR(表“被信号中断”)
可修改sa_flags参数来设置被信号中断后系统调用是否重启。SA_INTERRURT不重启。 SA_RESTART重启。
扩展了解:
sa_flags还有很多可选参数,适用于不同情况。如:捕捉到信号后,在执行捕捉函数期间,不希望自动阻塞该信号,可将sa_flags设置为SA_NODEFER,除非sa_mask中包含该信号