c++ opencv数字图像处理:频率域滤波基础,傅里叶变换及频谱图
文章目录
- 前言
- 一、傅里叶级数及傅里叶变换
- 二、二维图像中的傅里叶变换
-
- 1.基本原理公式(离散傅里叶变换(DFT),离散傅里叶逆变换(IDFT))
- 2.opencv傅里叶变换c++代码
- 3.频谱图
前言
数字图像处理c++ opencv(VS2019 opencv4.53)持续更新
一、傅里叶级数及傅里叶变换
傅立叶变换如何理解?美颜和变声都是什么原理?李永乐老师告诉你
【官方双语】形象展示傅里叶变换
二、二维图像中的傅里叶变换
1.基本原理公式(离散傅里叶变换(DFT),离散傅里叶逆变换(IDFT))
(1)一维离散傅里叶变换:

一维离散傅里叶逆变换:

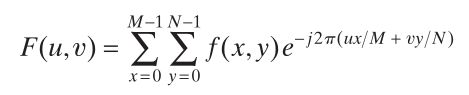
(2)二维离散傅里叶变换:
二维离散傅里叶逆变换:

2.opencv傅里叶变换c++代码
参考:
1
2
#include结果:

3.频谱图
(1)频谱图从中心点到四周,频率越来越大;
(2)频谱图中心点一般最亮,与原图像平均亮度相关;
(3)频率域滤波就是改变频谱图中高频率或者低频率的值.
(4)频谱图中的点关于中心点对称,对称的两点表示某个频率的波。
(5)两个对称点离中心点的距离代表频率的高低,离中心点越远代表的频率越高。
(6)两个对称点的亮度表示波的幅值,越亮幅值越大。
(7)图像中,低频率代表灰度变化缓慢的信息;高频率代表变化剧烈的信息,如边缘及噪声等。在(6)中,低频区越亮代表变化缓慢的区域较多,高频区越亮代表图像细节很多。
(8)对称点所在直线的方向为波的方向,与原图中对应的线性信息垂直。如下图,图中有一组平行的线,在频谱图垂直方向也有一条较亮的线(可用于方向滤波,增强或者滤除某个方向的线性特征)。
