冈萨雷斯数字图像处理第三章灰度变换与空间滤波算法 c++
3.2一些基本的灰度变换函数
具体有 1、图像反转函数 2、对数变换函数 3、幂次(伽马)变换函数 4、分段线性变换函数(对比拉伸、灰度切割、位图切割)
3.2.1图像反转函数
1.数学原理
灰度级范围【0,L-1】的图像反转: S= L-1 -r r为输入,s为输出。
适用于增强嵌入图像暗色区域的白色或灰色细节,特别是黑色面积占据主导地位时。
图像反转就是黑白颠倒,若像素px= 0,则反转后px=255。公式:反转后的像素a= 255- a
2.实现过程
输入
水平翻转:[1,1,0] ---- [0,1,1]
反转图像 [0,1,1] -----[1,0,0] 0与1互换
输出
3.实现代码 c++
直接访问像素点
#include (i,j)可以得到坐标为(i,j)点的像素值
}
}
//显示图片
imshow("dst", src);
waitKey(0);
return 0;
}
结果

3.2.2对数变换函数
1.数学原理
实现图像灰度的压缩和膨胀。将窄带低灰度输入图像值进行拓展映射为宽带输出值。即为拓展灰度级小的暗像素,压缩灰度级大的亮像素。最终实现强调图像低灰度值的效果。
S = C * log(1+r)
2.实现步骤
在程序中使用add(InputArray src1, InputArray src2, OutputArray dst, InputArray mask=noArray(), int dtype=-1)
要实现r+1:add(InputImage,Scalar(1.0),OutputImage);
实现log(r+1):log(InputImage,OutputImage)。
3.代码实现 c++
//基于源图像的方法
#include 3.23 幂次(伽马)变换
1.数学原理
![]()
上面公式中,s为输出8位灰度图,r为输入8位灰度图,c为常数,γ为指数
下面图片中
γ<1时,将γ输入窄范围的暗色输入值映射到较宽范围的输出值,扩大灰度值使得暗色显示更明显
γ>1时,将γ输入窄范围的亮色输入值映射到较宽范围的输出值,压缩灰度值使得亮色显示更明显
幂次变化又称为伽马矫正:指用来校正监视器显示的非线性特点,通过调整γ来实现期望图像

2.实质
伽马变换的实质就是对每一个像素进行幂函数操作
3.代码实现
#include 3.2.4分段线性变化函数
1.对比拉伸
(1)数学原理:低对比度的图像由照明不足、成像传感器动态范围太小、图像获取过程中镜头光圈设置错误引起。对比度拉伸是扩展图像灰度级动态范围的处理,因此可以跨越记录介质和显示装置的全部灰度范围。
图3.10(b)显示了一幅8比特低对比度图像。图3.10©显示了对比拉伸后的效果,得到该效果的参数设置如下:(r1,s1)=(rmin,0)且(r2,s2)=(rmax,L-1),其中rmin和rmax分别为图像中的最小灰度级和最大灰度级。因此,变换函数把灰度级由原范围线性地拉伸到整个范围[0,L-1]。
图3.10(d)显示了前面定义的(r1,s1)=(m,0)和(r2,s2)=(m,L-1)的阈值处理函数后的结果,其中,m是图像的平均灰度级。
(2)实现原理
Y = aX+b X为输入灰度值,Y为输出灰度值,a b为对比拉伸函数的系数
先将输入灰度值归于0-255,然后再利用公式进行对比度拉伸
(3)实现代码
#include (i,j)表示第i行第j列的像素点
{
min = src.at<uchar>(i, j);
}
if (src.at<uchar>(i, j) > max)
{
max = src.at<uchar>(i, j);
}
}
}
//Y = aX+b X为输入灰度值,Y为输出灰度值,a b为对比拉伸函数的系数
double a = 255 / (max - min);
double b = -(a * min);
double result;
for (int i = 0; i < height; i++)
{
for (int j = 0; j < width; j++)
{
result = src.at<uchar>(i, j) * a + b;
if (result > 255)
{
result = 255;
}
dst.at<uchar>(i, j) = result;
}
}
return dst;
}
//主函数应用对比度拉伸函数
int main1()
{
Mat src = imread("C://Users//征途//Desktop//vs-cpp//Project1//03.jpg");
imshow("src", src);
Mat dst = Contrast_radio(src);
imshow("dst", dst);
waitKey(0);
return 0;
}
2.灰度分割
(1)数学原理
两种方法
方法一将所需范围所有灰度值显示为一个值如白色,其他灰度值显示另一个值如黑色
方法二,将所需范围的灰度变亮或者变暗,保持其他灰度级不变

(2)实现代码
3.比特平面分层–位图切割
(1)数学原理
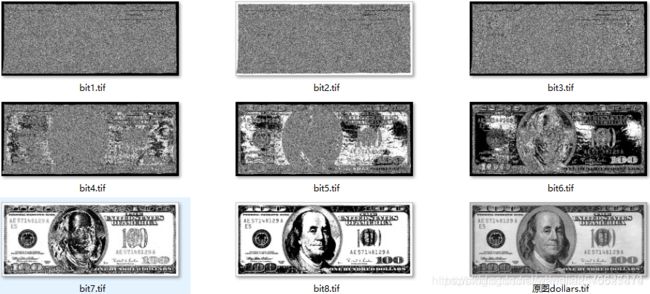
一幅图像包含256个像素,一个像素有8比特,8bit由8个比特平面组成,0-7,从最低位到最高位;
前两个低阶比特平面贡献精细的灰度细节,后四个高阶比特平面包含视觉重要的数据;
源图像任意一个像素的值,可以由比特平面二进制像素值重建:如原图上194像素点,可以二进制形式分在8比特平面上,11000010.
位图切割就是将一副平面分解成比特平面,可以帮助我们量化图像的比特数的充分性。

(2)实现代码
#include