(Opencv C++)数字图像处理——图像分割压缩
我们从下面三个方面来进行相应的数字图像处理
一、图象噪声估计
二、图象分割
三、图像压缩及解压
一、图象噪声估计
•常见的噪声模型:
•1、高斯噪声;
•2、瑞利噪声;
•3、伽马噪声;
•4、指数分布噪声;
•5、均匀分布噪声;
•6、脉冲噪声;
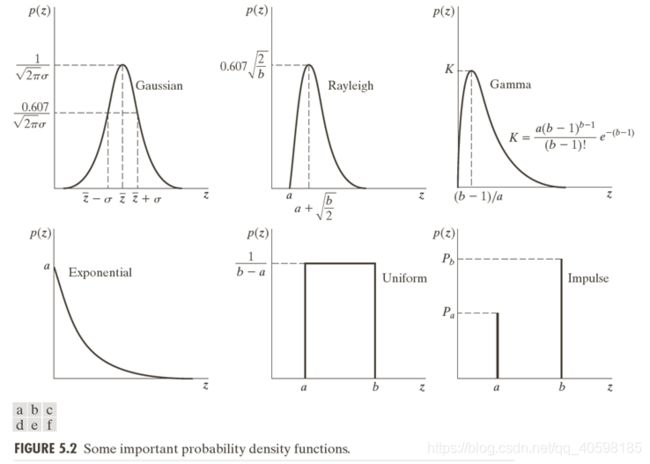
图中噪声分别是:
-
•a.高斯噪声分布图;
•b.瑞利噪声分布图;
•c.伽马噪声分布图;
•d.指数噪声分布图;
•e.均匀噪声分布图;
•f.脉冲噪声分布图;
-
我们将用到的库函数是:
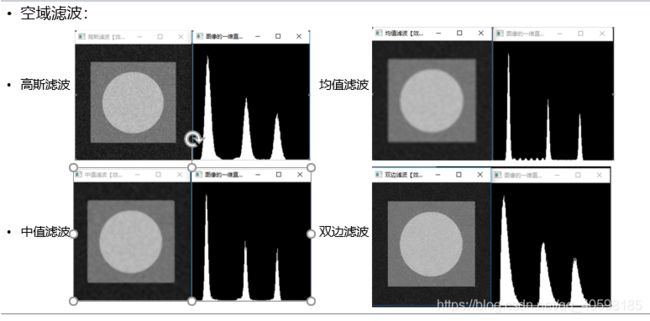
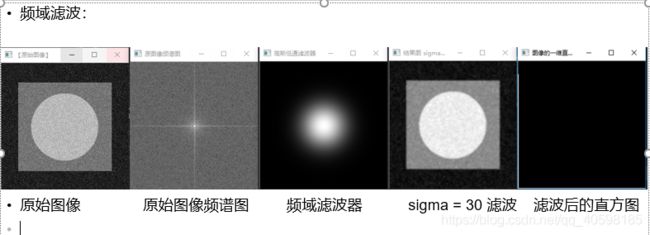
CV_EXPORTS_W void blur( InputArray src, OutputArray dst, Size ksize, Point anchor = Point(-1,-1), int borderType = BORDER_DEFAULT );(均值滤波函数) CV_EXPORTS_W void GaussianBlur( InputArray src, OutputArray dst, Size ksize,double sigmaX, double sigmaY = 0,int borderType = BORDER_DEFAULT );(高斯滤波函数) CV_EXPORTS_W void medianBlur( InputArray src, OutputArray dst, int ksize );(中值滤波函数) CV_EXPORTS_W void bilateralFilter( InputArray src, OutputArray dst, int d,double sigmaColor, double sigmaSpace,int borderType = BORDER_DEFAULT );(双边滤波函数) CV_EXPORTS_W int getOptimalDFTSize(int vecsize);(得到最佳IDFT变换尺寸函数) CV_EXPORTS_W void dft(InputArray src, OutputArray dst, int flags = 0, int nonzeroRows = 0);(dft变换函数) CV_EXPORTS void calcHist( const Mat* images, int nimages,const int* channels, InputArray mask,OutputArray hist, int dims, const int* histSize,const float** ranges, bool uniform = true, bool accumulate = false );(计算直方图函数)这里我们准备了五种滤波器,分别是均值滤波器,高斯滤波器,中值滤波器,双边滤波器,频域高斯滤波器(主要是滤一些周期噪声)
-
图像噪声的估计流程如下:

-
相应的程序如下:
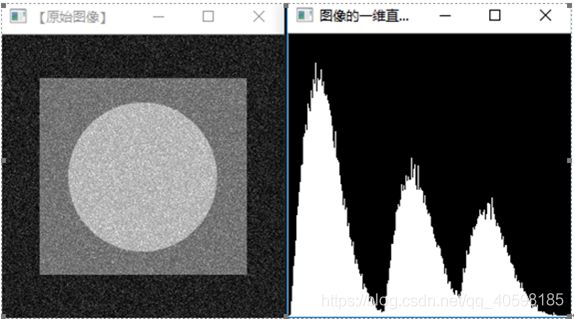
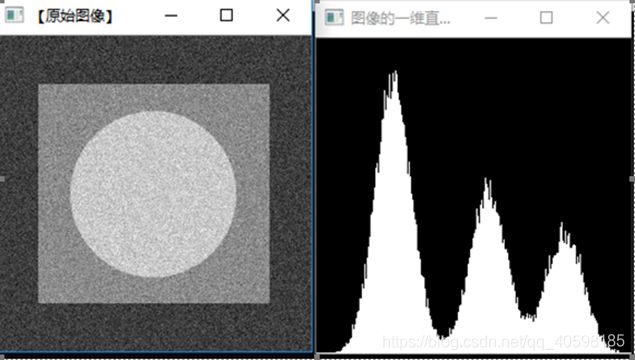
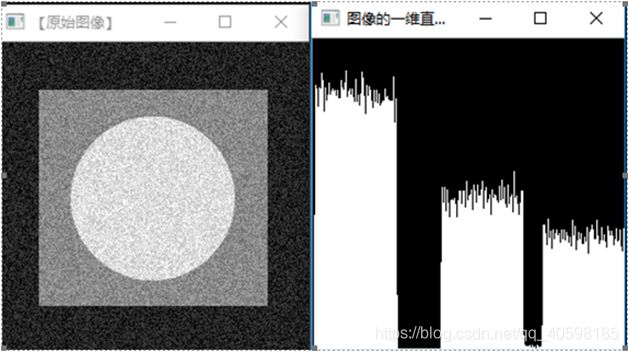
/*均值滤波函数*/ Mat Blurefilterfunction(Mat &img) { namedWindow("均值滤波【效果图】", CV_WINDOW_AUTOSIZE); Mat out; blur(img, out,Size(7, 7)); /*这里选用7*7的内核进行均值滤波*/ imshow("均值滤波【效果图】", out); return out; } /*高斯滤波函数*/ Mat GaussianBlurfilterfunction(Mat &img) { namedWindow("高斯滤波【效果图】", CV_WINDOW_AUTOSIZE); Mat out; GaussianBlur(img, out, Size(3, 3),0,0); /*这里选用3*3的内核进行高斯滤波*/ imshow("高斯滤波【效果图】", out); return out; } /*中值滤波函数*/ Mat MedianBlurfilterfunction(Mat &img) { namedWindow("中值滤波【效果图】", CV_WINDOW_AUTOSIZE); Mat out; medianBlur(img, out, 7); imshow("中值滤波【效果图】", out); return out; } /*双边滤波函数*/ Mat BilateralBlurfilterfunction(Mat &img) { namedWindow("双边滤波【效果图】", CV_WINDOW_AUTOSIZE); Mat out; bilateralFilter(img, out, 25, 25 * 2, 25 / 2); imshow("双边滤波【效果图】", out); return out; } /*高斯频域低通滤波器*/ //************************************** //频率域滤波——以高斯低通为例 //************************************** Mat gaussianlbrf(Mat scr, float sigma);//高斯低通滤波器函数 Mat freqfilt(Mat scr, Mat blur);//频率域滤波函数 Mat FrequencyDomainGaussFiltering(Mat &input) { //Mat input = imread("p3-00-01.tif", CV_LOAD_IMAGE_GRAYSCALE); int w = getOptimalDFTSize(input.cols); //获取进行dtf的最优尺寸 int h = getOptimalDFTSize(input.rows); //获取进行dtf的最优尺寸 Mat padded; copyMakeBorder(input, padded, 0, h - input.rows, 0, w - input.cols, BORDER_CONSTANT, Scalar::all(0)); //边界填充 padded.convertTo(padded, CV_32FC1); //将图像转换为flaot型 Mat gaussianKernel = gaussianlbrf(padded, 30);//高斯低通滤波器 Mat out = freqfilt(padded, gaussianKernel);//频率域滤波 imshow("结果图 sigma=30", out); return out; } //*****************高斯低通滤波器*********************** Mat gaussianlbrf(Mat scr, float sigma) { Mat gaussianBlur(scr.size(), CV_32FC1); //,CV_32FC1 float d0 = 2 * sigma*sigma;//高斯函数参数,越小,频率高斯滤波器越窄,滤除高频成分越多,图像就越平滑 for (int i = 0; i < scr.rows; i++) { for (int j = 0; j < scr.cols; j++) { float d = pow(float(i - scr.rows / 2), 2) + pow(float(j - scr.cols / 2), 2);//分子,计算pow必须为float型 gaussianBlur.at(i, j) = expf(-d / d0);//expf为以e为底求幂(必须为float型) } } imshow("高斯低通滤波器", gaussianBlur); return gaussianBlur; } //*****************频率域滤波******************* Mat freqfilt(Mat scr, Mat blur) { //***********************DFT******************* Mat plane[] = { scr, Mat::zeros(scr.size() , CV_32FC1) }; //创建通道,存储dft后的实部与虚部(CV_32F,必须为单通道数) Mat complexIm; merge(plane, 2, complexIm);//合并通道 (把两个矩阵合并为一个2通道的Mat类容器) dft(complexIm, complexIm);//进行傅立叶变换,结果保存在自身 //***************中心化******************** split(complexIm, plane);//分离通道(数组分离) int cx = plane[0].cols / 2; int cy = plane[0].rows / 2;//以下的操作是移动图像 (零频移到中心) Mat part1_r(plane[0], Rect(0, 0, cx, cy)); //元素坐标表示为(cx,cy) Mat part2_r(plane[0], Rect(cx, 0, cx, cy)); Mat part3_r(plane[0], Rect(0, cy, cx, cy)); Mat part4_r(plane[0], Rect(cx, cy, cx, cy)); Mat temp; part1_r.copyTo(temp); //左上与右下交换位置(实部) part4_r.copyTo(part1_r); temp.copyTo(part4_r); part2_r.copyTo(temp); //右上与左下交换位置(实部) part3_r.copyTo(part2_r); temp.copyTo(part3_r); Mat part1_i(plane[1], Rect(0, 0, cx, cy)); //元素坐标(cx,cy) Mat part2_i(plane[1], Rect(cx, 0, cx, cy)); Mat part3_i(plane[1], Rect(0, cy, cx, cy)); Mat part4_i(plane[1], Rect(cx, cy, cx, cy)); part1_i.copyTo(temp); //左上与右下交换位置(虚部) part4_i.copyTo(part1_i); temp.copyTo(part4_i); part2_i.copyTo(temp); //右上与左下交换位置(虚部) part3_i.copyTo(part2_i); temp.copyTo(part3_i); //*****************滤波器函数与DFT结果的乘积**************** Mat blur_r, blur_i, BLUR; multiply(plane[0], blur, blur_r); //滤波(实部与滤波器模板对应元素相乘) multiply(plane[1], blur, blur_i);//滤波(虚部与滤波器模板对应元素相乘) Mat plane1[] = { blur_r, blur_i }; merge(plane1, 2, BLUR);//实部与虚部合并 //*********************得到原图频谱图*********************************** magnitude(plane[0], plane[1], plane[0]);//获取幅度图像,0通道为实部通道,1为虚部,因为二维傅立叶变换结果是复数 plane[0] += Scalar::all(1); //傅立叶变o换后的图片不好分析,进行对数处理,结果比较好看 log(plane[0], plane[0]); // float型的灰度空间为[0,1]) normalize(plane[0], plane[0], 1, 0, CV_MINMAX); //归一化便于显示 imshow("原图像频谱图", plane[0]); idft(BLUR, BLUR); //idft结果也为复数 split(BLUR, plane);//分离通道,主要获取通道 magnitude(plane[0], plane[1], plane[0]); //求幅值(模) normalize(plane[0], plane[0], 1, 0, CV_MINMAX); //归一化便于显示 return plane[0];//返回参数 } /*绘制直方图函数*/ void Drawing_one_dimensionalhistogram(Mat &img) { /*输入图像转化为灰度图像*/ //cvtColor(img, img, CV_BGR2GRAY); /*定义变量*/ MatND dstHist; int dims = 1; float hranges[] = { 0,255 }; const float *ranges[] = { hranges }; /*这里需要为const类型*/ int size = 256; int channels = 0; /*计算图像的直方图*/ calcHist(&img, 1, &channels, Mat(), dstHist, dims, &size, ranges); int scale = 1; Mat dstImage(size * scale, size, CV_8U, Scalar(0)); /*获取最大值和最小值*/ double minValue = 0; double maxValue = 0; minMaxLoc(dstHist, &minValue, &maxValue, 0, 0); /*绘制出直方图*/ int hpt = saturate_cast (0.9 * size); for (int i = 0; i < 256; i++) { float binValue = dstHist.at (i); int realValue = saturate_cast (binValue * hpt / maxValue); rectangle(dstImage, Point(i*scale, size - 1), Point((i + 1)*scale - 1, size - realValue), Scalar(255)); } imshow("图像的一维直方图", dstImage); } 例如下列图片的直方图:
-
-
-
-
从上到下分别为瑞利噪声(周期噪声),高斯噪声,均匀噪声(周期噪声)
-
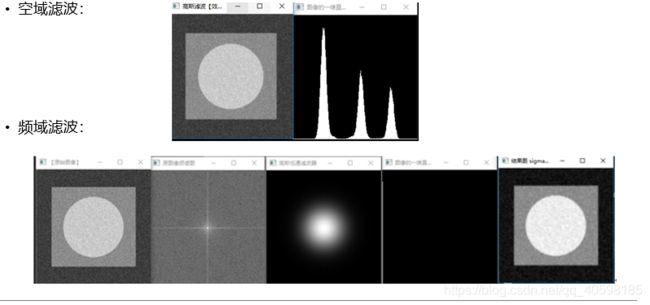
首先我们先对瑞利噪声在空域滤波,效果图如下:
-
-
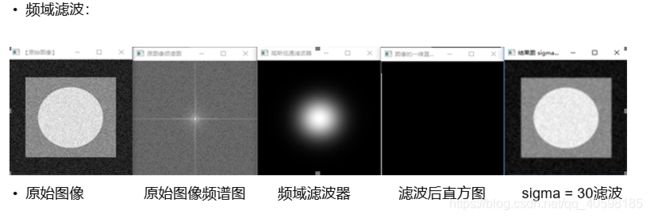
频域滤波,效果图如下:
-
-
对于高斯噪声,我们只需要对其高斯滤波即可,但是这里需要进行相应的参数调节,效果图如下:
-
-
最后一个均匀噪声,也属于周期噪声的一种,这里我们需要对其在频域滤波,效果图如下:
-
-
二、图象分割
-
大津分割流程图:
-

-
我们使用到的库函数为:
CV_EXPORTS_W double threshold( InputArray src, OutputArray dst,double thresh, double maxval, int type );(阀值化函数)相应的程序如下:
/*计算大津分割的阈值*/ int OtsuAlgThreshold(const Mat image) { if (image.channels() != 1) { cout << "Please input Gray-image!" << endl; return 0; } int T = 0; //Otsu算法阈值 double varValue = 0; //类间方差中间值保存 double w0 = 0; //前景像素点数所占比例 double w1 = 0; //背景像素点数所占比例 double u0 = 0; //前景平均灰度 double u1 = 0; //背景平均灰度 double Histogram[256] = { 0 }; //灰度直方图,下标是灰度值,保存内容是灰度值对应的像素点总数 int Histogram1[256] = { 0 }; uchar *data = image.data; double totalNum = image.rows*image.cols; //像素总数 //计算灰度直方图分布,Histogram数组下标是灰度值,保存内容是灰度值对应像素点数 for (int i = 0; i < image.rows; i++) //为表述清晰,并没有把rows和cols单独提出来 { for (int j = 0; j < image.cols; j++) { Histogram[data[i*image.step + j]]++; Histogram1[data[i*image.step + j]]++; } } //***********画出图像直方图******************************** Mat image1(255, 255, CV_8UC3); for (int i = 0; i < 255; i++) { Histogram1[i] = Histogram1[i] % 200; line(image1, Point(i, 235), Point(i, 235 - Histogram1[i]), Scalar(255, 0, 0), 1, 8, 0); if (i % 50 == 0) { char ch[255]; sprintf_s(ch, "%d", i); string str = ch; putText(image1, str, Point(i, 250), 1, 1, Scalar(0, 0, 255)); } } //***********画出图像直方图******************************** for (int i = 0; i < 255; i++) { //每次遍历之前初始化各变量 w1 = 0; u1 = 0; w0 = 0; u0 = 0; //***********背景各分量值计算************************** for (int j = 0; j <= i; j++) //背景部分各值计算 { w1 += Histogram[j]; //背景部分像素点总数 u1 += j * Histogram[j]; //背景部分像素总灰度和 } if (w1 == 0) //背景部分像素点数为0时退出 { break; } u1 = u1 / w1; //背景像素平均灰度 w1 = w1 / totalNum; // 背景部分像素点数所占比例 //***********背景各分量值计算************************** //***********前景各分量值计算************************** for (int k = i + 1; k < 255; k++) { w0 += Histogram[k]; //前景部分像素点总数 u0 += k * Histogram[k]; //前景部分像素总灰度和 } if (w0 == 0) //前景部分像素点数为0时退出 { break; } u0 = u0 / w0; //前景像素平均灰度 w0 = w0 / totalNum; // 前景部分像素点数所占比例 //***********前景各分量值计算************************** //***********类间方差计算****************************** double varValueI = w0 * w1*(u1 - u0)*(u1 - u0); //当前类间方差计算 if (varValue < varValueI) { varValue = varValueI; T = i; } } //画出以T为阈值的分割线 line(image1, Point(T, 235), Point(T, 0), Scalar(0, 0, 255), 2, 8); imshow("直方图", image1); return T; } //***************Otsu算法通过求类间方差极大值求自适应阈值***************** Mat Otsusegmentation(Mat &img) { cvtColor(img, img, CV_RGB2GRAY); Mat imageOutput; Mat imageOtsu; int thresholdValue = OtsuAlgThreshold(img); cout << "类间方差为: " << thresholdValue << endl; threshold(img, imageOutput, thresholdValue, 255, CV_THRESH_BINARY); threshold(img, imageOtsu, 0, 255, CV_THRESH_OTSU); //Opencv Otsu算法; imshow("大津分割【效果图】", imageOutput); imshow("Opencv Otsu【效果图】", imageOtsu); return imageOutput; }首先我们先计算一张图片的阈值,得到其最小类方差:
-

-
然后进行相应的阈值值化操作:
-

-
图像分割还有一种称为交互式分割,这里我们直接使用库函数:
CV_EXPORTS_W void grabCut( InputArray img, InputOutputArray mask, Rect rect, InputOutputArray bgdModel, InputOutputArray fgdModel, int iterCount, int mode = GC_EVAL ); img:待分割的源图像,必须是8位3通道(CV_8UC3)图像,在处理的过程中不会被修改; mask:掩码图像,大小和原图像一致。可以有如下几种取值: GC_BGD(=0),背景; GC_FGD(=1),前景; GC_PR_BGD(=2),可能的背景; GC_PR_FGD(=3),可能的前景。 rect:用于限定需要进行分割的图像范围,只有该矩形窗口内的图像部分才被处理; bgdModel:背景模型,如果为null,函数内部会自动创建一个bgdModel; fgdModel:前景模型,如果为null,函数内部会自动创建一个fgdModel; iterCount:迭代次数,必须大于0; mode:用于指示grabCut函数进行什么操作。可以有如下几种选择: GC_INIT_WITH_RECT(=0),用矩形窗初始化GrabCut; GC_INIT_WITH_MASK(=1),用掩码图像初始化GrabCut; GC_EVAL(=2),执行分割。代码如下:
/*grath_cut*/ void grathcutfunctiong(Mat &img) { Mat bgModel, fgModel, mask; Rect rect; rect.x = 50; rect.y = 45; rect.width = img.cols - (rect.x << 1); rect.height = img.rows - (rect.y << 1); rectangle(img, rect, Scalar(0, 0, 255), 3, 8, 0);//用矩形画矩形窗 //循环执行3次,这个可以自己设置 grabCut(img, mask, rect, bgModel, fgModel, 3, GC_INIT_WITH_RECT); compare(mask, GC_PR_FGD, mask, CMP_EQ); Mat foreground(img.size(), CV_8UC3, Scalar(255, 255, 255)); img.copyTo(foreground, mask); imshow("foreground", foreground); }相应的效果图如下:
-

-

-
这里再附一个分水岭算法的代码,有兴趣的可以试一试:
Mat g_maskImage, g_scrImage; Point prevPt(-1, -1); static void ShowHelpText(); static void on_Mouse(int event, int x, int y, int flags, void*); /*分水岭算法*/ void Watershedfunction(Mat &g_scrImage) { /*初始化掩膜和灰度图*/ Mat scrImage, grayImage; grayImage.copyTo(scrImage); cvtColor(g_scrImage, g_maskImage, COLOR_BGR2GRAY); cvtColor(g_maskImage, grayImage, COLOR_GRAY2BGR); g_maskImage = Scalar::all(0); /*设置鼠标回调函数*/ setMouseCallback(WINDOW_NAME, on_Mouse, 0); /*轮询按键,进行处理*/ while (1) { /*获取键值*/ int c = waitKey(0); /*若按键值为ESC时,退出*/ if ((char)c == 27) { break; } /*若按键值为2时,恢复原图*/ if ((char)c == '2') { g_maskImage = Scalar::all(0); scrImage.copyTo(g_scrImage); imshow("image",g_scrImage); } /*若按键值为1或者空格,则进行处理*/ if ((char)c == '1' || (char)c == ' ') { /*定义一些参数*/ int i, j, compCount = 0; vectorhierarchy; /*寻找轮廓*/ findContours(g_maskImage, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE); /*轮廓为空时的处理*/ if (contours.empty()) continue; /*复制掩膜*/ Mat maskImage(g_maskImage.size(), CV_32S); maskImage = Scalar::all(0); /*循环绘制出轮廓*/ for (int index = 0; index > 0; index = hierarchy[index][0], compCount++) drawContours(maskImage, contours, index, Scalar::all(compCount + 1), -1, 8, hierarchy, INT_FAST16_MAX); /*compCount为0时的处理*/ if (compCount == 0) continue; /*生成随机颜色*/ vector colorTab; for (i = 0; i < compCount; i++) { int b = theRNG().uniform(0, 255); int g = theRNG().uniform(0, 255); int r = theRNG().uniform(0, 255); colorTab.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r)); } /*计算处理时间并输出到窗口中*/ double dTime = (double)getTickCount(); watershed(scrImage, maskImage); dTime = (double)getTickCount() - dTime; printf("\t处理时间 = %gms\n",dTime*1000./getTickFrequency()); /*双层循环,将分水岭图像遍历存入watershedImage中*/ Mat watershedImage(maskImage.size(), CV_8UC3); for(i=0;i (i, j) = Vec3b(255, 255, 255); else if (index <= 0 || index > compCount) watershedImage.at (i, j) = Vec3b(0, 0, 0); else watershedImage.at (i, j) = colorTab[index - 1]; } watershedImage = watershedImage * 0.5 + grayImage * 0.5; imshow("watershed transform",watershedImage); } } } static void on_Mouse(int event, int x, int y, int flags, void *) { /*处理鼠标不在窗口中的情况*/ if (x < 0 || x >= g_scrImage.cols || y < 0 || y >= g_maskImage.rows) return; /*数理鼠标左键相关信息*/ if (event == EVENT_LBUTTONUP || !(flags & EVENT_FLAG_LBUTTON)) prevPt = Point(-1, -1); else if (event == EVENT_LBUTTONDOWN) prevPt = Point(x, y); /*鼠标左键按下并移动,绘制出白色线条*/ else if (event == EVENT_MOUSEMOVE && (flags & EVENT_FLAG_LBUTTON)) { Point pt(x, y); if (prevPt.x < 0) prevPt = pt; line(g_maskImage, prevPt, pt, Scalar::all(255), 5, 8, 0); line(g_scrImage, prevPt, pt, Scalar::all(255), 5, 8, 0); prevPt = pt; imshow(WINDOW_NAME,g_scrImage); } } 三、图像压缩及解压
-
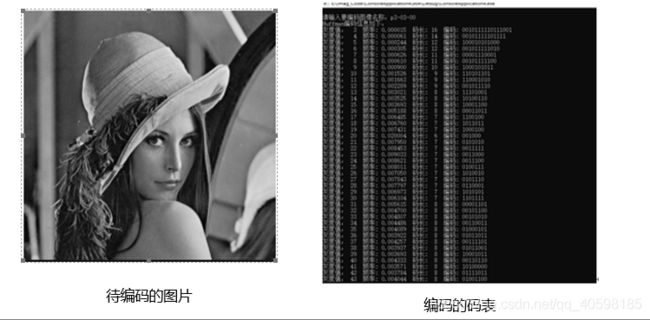
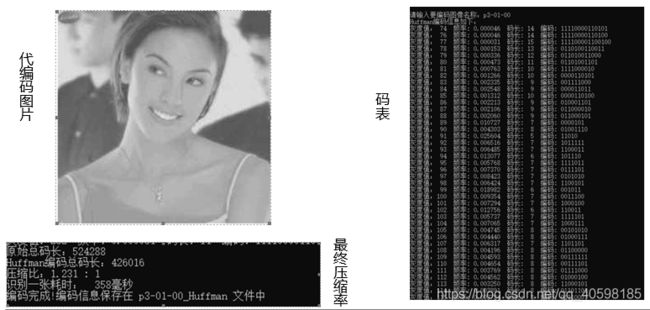
(1)、霍夫曼编码压缩图片:
-
其流程图如下:
-

-
代码如下:
-
/*哈夫曼编码*/ //几个全局变量,存放读入图像的位图数据、宽、高、颜色表及每像素所占位数(比特) //此处定义全局变量主要为了后面的图像数据访问及图像存储作准备 unsigned char *pBmpBuf;//读入图像数据的指针 int bmpWidth;//图像的宽 int bmpHeight;//图像的高 int imgSpace;//图像所需空间 RGBQUAD *pColorTable;//颜色表指针 int biBitCount;//图像类型 char str[100];//文件名称 int Num[300];//各灰度值出现的次数 float Feq[300];//各灰度值出现的频率 unsigned char *lpBuf;//指向图像像素的指针 unsigned char *m_pDib;//存放打开文件的DIB int NodeNum; //Huffman树总节点个数 int NodeStart; //Huffman树起始节点 struct Node { //Huffman树节点 int color; //记录叶子节点的灰度值(非叶子节点为 -1) int lson, rson; //节点的左右儿子(若没有则为 -1) int num; //节点的数值(编码依据) int mark; //记录节点是否被用过(用过为1,没用过为0) }node[600]; char CodeStr[300][300]; //记录编码值 int CodeLen[300]; //编码长度 bool ImgInf[8000000]; //图像信息 int InfLen; //图像信息长度 /*********************************************************************** * 函数名称: * readBmp() * *函数参数: * char *bmpName -文件名字及路径 * *返回值: * 0为失败,1为成功 * *说明:给定一个图像文件名及其路径,读图像的位图数据、宽、高、颜色表及每像素 * 位数等数据进内存,存放在相应的全局变量中 ***********************************************************************/ bool readBmp(char *bmpName) { //二进制读方式打开指定的图像文件 FILE *fp = fopen(bmpName, "rb"); if (fp == 0) { printf("未找到指定文件!\n"); return 0; } //跳过位图文件头结构BITMAPFILEHEADER fseek(fp, sizeof(BITMAPFILEHEADER), 0); //定义位图信息头结构变量,读取位图信息头进内存,存放在变量head中 BITMAPINFOHEADER head; fread(&head, sizeof(BITMAPINFOHEADER), 1, fp); //获取图像宽、高、每像素所占位数等信息 bmpWidth = head.biWidth; bmpHeight = head.biHeight; biBitCount = head.biBitCount; //定义变量,计算图像每行像素所占的字节数(必须是4的倍数) int lineByte = (bmpWidth * biBitCount / 8 + 3) / 4 * 4; //灰度图像有颜色表,且颜色表表项为256 if (biBitCount == 8) { //申请颜色表所需要的空间,读颜色表进内存 pColorTable = new RGBQUAD[256]; fread(pColorTable, sizeof(RGBQUAD), 256, fp); } //申请位图数据所需要的空间,读位图数据进内存 pBmpBuf = new unsigned char[lineByte * bmpHeight]; fread(pBmpBuf, 1, lineByte * bmpHeight, fp); //关闭文件 fclose(fp); return 1; } /*********************************************************************** 保存信息 ***********************************************************************/ //二进制转十进制 int Change2to10(int pos) { int i, j, two = 1; j = 0; for (i = pos + 7; i >= pos; i--) { j += two * ImgInf[i]; two *= 2; } return j; } //保存Huffman编码树 int saveInfo(char *writePath, int lineByte) { int i, j ; FILE *fout; fout = fopen(writePath, "w"); fprintf(fout, "%d %d %d\n", NodeStart, NodeNum, InfLen);//输出起始节点、节点总数、图像所占空间 for (i = 0; i < NodeNum; i++) { //输出Huffman树 fprintf(fout, "%d %d %d\n", node[i].color, node[i].lson, node[i].rson); } fclose(fout); return 0; } //保存文件 bool saveBmp(char *bmpName, unsigned char *imgBuf, int width, int height, int biBitCount, RGBQUAD *pColorTable) { //如果位图数据指针为0,则没有数据传入,函数返回 if (!imgBuf) return 0; //颜色表大小,以字节为单位,灰度图像颜色表为1024字节,彩色图像颜色表大小为0 int colorTablesize = 0; if (biBitCount == 8) colorTablesize = 1024; //待存储图像数据每行字节数为4的倍数 int lineByte = (width * biBitCount / 8 + 3) / 4 * 4; //以二进制写的方式打开文件 FILE *fp = fopen(bmpName, "wb"); if (fp == 0) return 0; //申请位图文件头结构变量,填写文件头信息 BITMAPFILEHEADER fileHead; fileHead.bfType = 0x4D42;//bmp类型 //bfSize是图像文件4个组成部分之和 fileHead.bfSize = sizeof(BITMAPFILEHEADER) + sizeof(BITMAPINFOHEADER) + colorTablesize + lineByte * height; fileHead.bfReserved1 = 0; fileHead.bfReserved2 = 0; //bfOffBits是图像文件前三个部分所需空间之和 fileHead.bfOffBits = 54 + colorTablesize; //写文件头进文件 fwrite(&fileHead, sizeof(BITMAPFILEHEADER), 1, fp); //申请位图信息头结构变量,填写信息头信息 BITMAPINFOHEADER head; head.biBitCount = biBitCount; head.biClrImportant = 0; head.biClrUsed = 0; head.biCompression = 0; head.biHeight = height; head.biPlanes = 1; head.biSize = 40; head.biSizeImage = lineByte * height; head.biWidth = width; head.biXPelsPerMeter = 0; head.biYPelsPerMeter = 0; //写位图信息头进内存 fwrite(&head, sizeof(BITMAPINFOHEADER), 1, fp); //如果灰度图像,有颜色表,写入文件 if (biBitCount == 8) fwrite(pColorTable, sizeof(RGBQUAD), 256, fp); //写位图数据进文件 fwrite(imgBuf, InfLen / 8, 1, fp); //关闭文件 fclose(fp); return 1; } /********************* Huffman编码图像解码 *********************/ //读入编码图像 bool readHuffman(char *Name) { int i; char NameStr[100]; //读取Huffman编码信息和编码树 strcpy(NameStr, Name); strcat(NameStr, ".bpt"); FILE *fin = fopen(NameStr, "r"); if (fin == 0) { printf("未找到指定文件!\n"); return 0; } fscanf(fin, "%d %d %d", &NodeStart, &NodeNum, &InfLen); //printf("%d %d %d\n",NodeStart,NodeNum,InfLen); for (i = 0; i < NodeNum; i++) { fscanf(fin, "%d %d %d", &node[i].color, &node[i].lson, &node[i].rson); } //二进制读方式打开指定的图像文件 strcpy(NameStr, Name); strcat(NameStr, ".bhd"); FILE *fp = fopen(NameStr, "rb"); if (fp == 0) { printf("未找到指定文件!\n"); return 0; } //跳过位图文件头结构BITMAPFILEHEADER fseek(fp, sizeof(BITMAPFILEHEADER), 0); //定义位图信息头结构变量,读取位图信息头进内存,存放在变量head中 BITMAPINFOHEADER head; fread(&head, sizeof(BITMAPINFOHEADER), 1, fp); //获取图像宽、高、每像素所占位数等信息 bmpWidth = head.biWidth; bmpHeight = head.biHeight; biBitCount = head.biBitCount; //定义变量,计算图像每行像素所占的字节数(必须是4的倍数) int lineByte = (bmpWidth * biBitCount / 8 + 3) / 4 * 4; //灰度图像有颜色表,且颜色表表项为256 if (biBitCount == 8) { //申请颜色表所需要的空间,读颜色表进内存 pColorTable = new RGBQUAD[256]; fread(pColorTable, sizeof(RGBQUAD), 256, fp); } //申请位图数据所需要的空间,读位图数据进内存 pBmpBuf = new unsigned char[lineByte * bmpHeight]; fread(pBmpBuf, 1, InfLen / 8, fp); //关闭文件 fclose(fp); return 1; } void HuffmanDecode() { //获取编码信息 int i, j, tmp; int lineByte = (bmpWidth * biBitCount / 8 + 3) / 4 * 4; for (i = 0; i < InfLen / 8; i++) { j = i * 8 + 7; tmp = *(pBmpBuf + i); while (tmp > 0) { ImgInf[j] = tmp % 2; tmp /= 2; j--; } } //解码 int p = NodeStart; //遍历指针位置 j = 0; i = 0; do { if (node[p].color >= 0) { *(pBmpBuf + j) = node[p].color; j++; p = NodeStart; } if (ImgInf[i] == 1) p = node[p].lson; else if (ImgInf[i] == 0) p = node[p].rson; i++; } while (i <= InfLen); } /********************* Huffman编码 *********************/ //Huffman编码初始化 void HuffmanCodeInit() { int i; for (i = 0; i < 256; i++)//灰度值记录清零 Num[i] = 0; //初始化哈夫曼树 for (i = 0; i < 600; i++) { node[i].color = -1; node[i].lson = node[i].rson = -1; node[i].num = -1; node[i].mark = 0; } NodeNum = 0; } //深搜遍历Huffman树获取编码值 char CodeTmp[300]; void dfs(int pos, int len) { //遍历左儿子 if (node[pos].lson != -1) { CodeTmp[len] = '1'; dfs(node[pos].lson, len + 1); } else { if (node[pos].color != -1) { CodeLen[node[pos].color] = len; CodeTmp[len] = '\0'; strcpy(CodeStr[node[pos].color], CodeTmp); } } //遍历右儿子 if (node[pos].lson != -1) { CodeTmp[len] = '0'; dfs(node[pos].rson, len + 1); } else { if (node[pos].color != -1) { CodeLen[node[pos].color] = len; CodeTmp[len] = '\0'; strcpy(CodeStr[node[pos].color], CodeTmp); } } } //寻找值最小的节点 int MinNode() { int i, j = -1; for (i = 0; i < NodeNum; i++) if (!node[i].mark) if (j == -1 || node[i].num < node[j].num) j = i; if (j != -1) { NodeStart = j; node[j].mark = 1; } return j; } //编码主函数 void HuffmanCode() { int i, j, k, a, b; for (i = 0; i < 256; i++) {//创建初始节点 Feq[i] = (float)Num[i] / (float)(bmpHeight * bmpWidth);//计算灰度值频率 if (Num[i] > 0) { node[NodeNum].color = i; node[NodeNum].num = Num[i]; node[NodeNum].lson = node[NodeNum].rson = -1; //叶子节点无左右儿子 NodeNum++; } } while (1) { //找到两个值最小的节点,合并成为新的节点 a = MinNode(); if (a == -1) break; b = MinNode(); if (b == -1) break; //构建新节点 node[NodeNum].color = -1; node[NodeNum].num = node[a].num + node[b].num; node[NodeNum].lson = a; node[NodeNum].rson = b; NodeNum++; } //根据建好的Huffman树编码(深搜实现) dfs(NodeStart, 0); //屏幕输出编码 int sum = 0; printf("Huffman编码信息如下:\n"); for (i = 0; i < 256; i++) if (Num[i] > 0) { sum += CodeLen[i] * Num[i]; printf("灰度值:%3d 频率: %f 码长: %2d 编码: %s\n",i,Feq[i],CodeLen[i],CodeStr[i]); } printf("原始总码长:%d\n",bmpWidth * bmpHeight * 8); printf("Huffman编码总码长:%d\n",sum); printf("压缩比:%.3f : 1\n",(float)(bmpWidth * bmpHeight * 8) / (float)sum); for (i = 0; i < 256; i++) if (Num[i] > 0) { sum += CodeLen[i] * Num[i]; } //记录图像信息 InfLen = 0; int lineByte = (bmpWidth * biBitCount / 8 + 3) / 4 * 4; for (i = 0; i < bmpHeight; i++) for (j = 0; j < bmpWidth; j++) { lpBuf = (unsigned char *)pBmpBuf + lineByte * i + j; for (k = 0; k < CodeLen[*(lpBuf)]; k++) { ImgInf[InfLen++] = (int)(CodeStr[*(lpBuf)][k] - '0'); } } //再编码数据 j = 0; for (i = 0; i < InfLen;) { *(pBmpBuf + j) = Change2to10(i); i += 8; j++; } } /****************************** 主函数 ******************************/ void Huffmanfunction() { int ord;//命令 char c; int i, j; clock_t start, finish; int total_time; // CString str; while (1) { printf("本程序提供以下功能\n\n\t1.256色灰度BMP图像Huffman编码\n\t2.Huffman编码BMP文件解码\n\t3.退出\n\n请选择需要执行的命令:"); scanf("%d%c", &ord, &c); if (ord == 1) { printf("\n---256色灰度BMP图像Huffman编码---\n"); printf("\n请输入要编码图像名称:"); scanf("%s", str); //读入指定BMP文件进内存 char readPath[100]; strcpy(readPath, str); strcat(readPath, ".bmp"); if (readBmp(readPath)) { int lineByte = (bmpWidth * biBitCount / 8 + 3) / 4 * 4; if (biBitCount == 8) { //编码初始化 HuffmanCodeInit(); //计算每个灰度值出现的次数 for (i = 0; i < bmpHeight; i++) for (j = 0; j < bmpWidth; j++) { lpBuf = (unsigned char *)pBmpBuf + lineByte * i + j; Num[*(lpBuf)] += 1; } //调用编码 start = clock(); HuffmanCode(); finish = clock(); total_time = (finish - start); printf("识别一张耗时: %d毫秒", total_time); //将图像数据存盘 char writePath[100]; //保存编码后的bmp strcpy(writePath, str); strcat(writePath, "_Huffman.bhd"); saveBmp(writePath, pBmpBuf, bmpWidth, bmpHeight, biBitCount, pColorTable); //保存Huffman编码信息和编码树 strcpy(writePath, str); strcat(writePath, "_Huffman.bpt"); saveInfo(writePath, lineByte); printf("\n编码完成!编码信息保存在 %s_Huffman 文件中\n\n", str); } else { printf("本程序只支持256色BMP编码!\n"); } //清除缓冲区,pBmpBuf和pColorTable是全局变量,在文件读入时申请的空间 delete[]pBmpBuf; if (biBitCount == 8) delete[]pColorTable; } printf("\n-----------------------------------------------\n\n\n"); } else if (ord == 2) { printf("\n---Huffman编码BMP文件解码---\n"); printf("\n请输入要解码文件名称:"); scanf("%s", str); //编码解码初始化 HuffmanCodeInit(); if (readHuffman(str)) { //读取文件 HuffmanDecode(); //Huffman解码 //将图像数据存盘 char writePath[100]; //保存解码后的bmp strcpy(writePath, str); strcat(writePath, "_Decode.bmp"); InfLen = bmpWidth * bmpHeight * 8; saveBmp(writePath, pBmpBuf, bmpWidth, bmpHeight, biBitCount, pColorTable); system(writePath); printf("\n解码完成!保存为 %s_Decode.bmp\n\n", str); } printf("\n-----------------------------------------------\n\n\n"); } else if (ord == 3) break; } } -
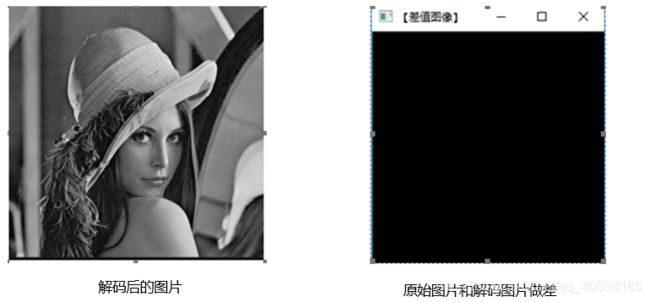
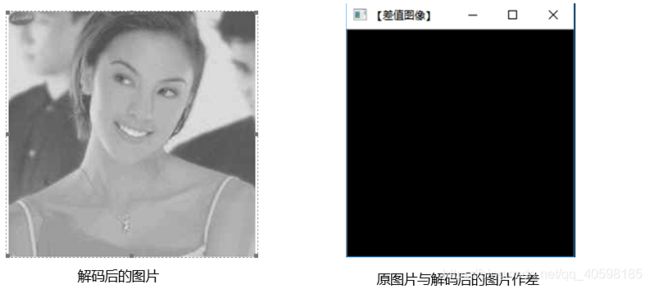
效果图如下:
-
-
-
-
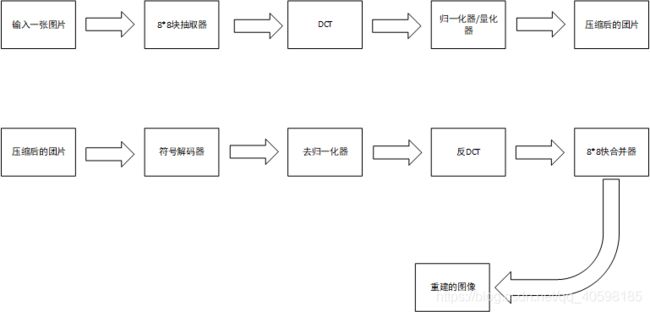
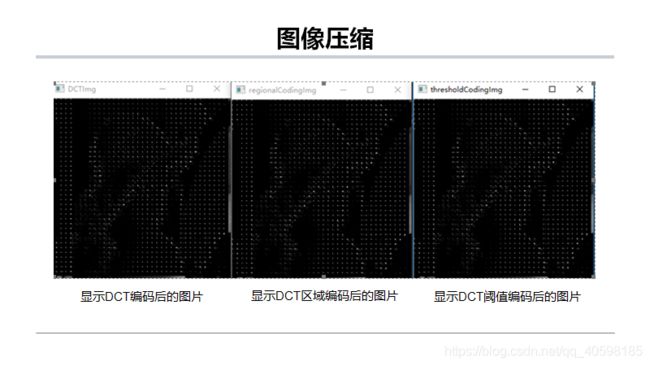
(2)、使用DCT变换进行图像压缩
-
其流程图如下:
-
-
代码如下:
-
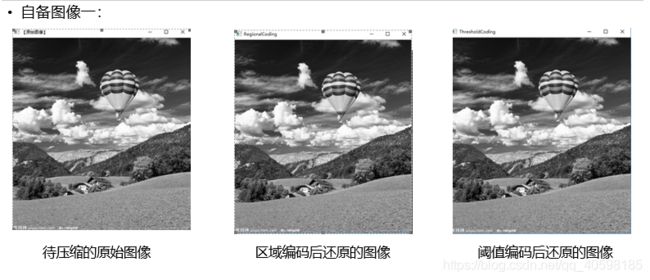
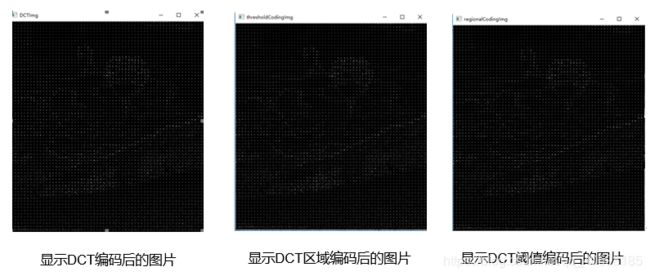
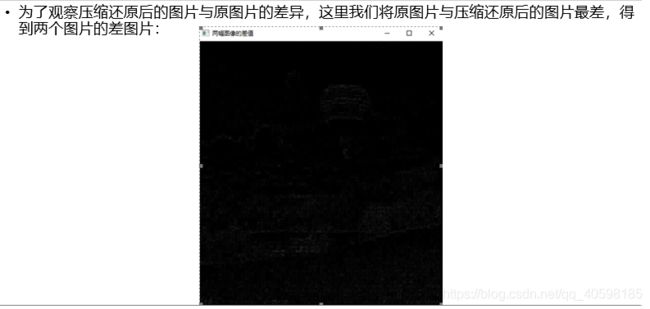
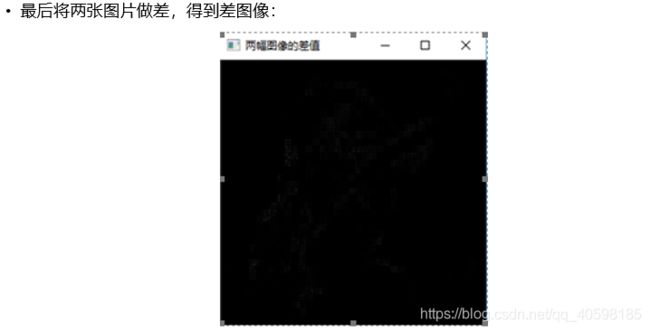
/*DCT压缩*/ void blkproc_DCT(Mat); //功能等同于Matlab的blkproc函数(blkproc(I,[8 8],'P1*x*P2',g,g')),用于对图像做8*8分块DCT Mat blkproc_IDCT(Mat); //功能等同于Matlab的blkproc函数(blkproc(I,[8 8],'P1*x*P2',g',g)),用于做8*8分块DCT逆变换,恢复原始图像 void regionalCoding(Mat); //区域编码函数,功能等同于Matlab的blkproc函数(blkproc(I1,[8 8],'P1.*x',a)) void thresholdCoding(Mat); //阈值编码函数,功能等同于Matlab的blkproc函数(blkproc(I1,[8 8],'P1.*x',a)) double get_medianNum(Mat &); //获取矩阵的中值,用于阈值编码 void ImageCompression_DCT(Mat &ucharImg) { //Mat ucharImg = imread("3.jpg", 0); //以灰度图的形式读入原始的图像 //imshow("srcImg", ucharImg); Mat doubleImg,OrignalImg; OrignalImg = ucharImg.clone(); ucharImg.convertTo(doubleImg, CV_64F); //将原始图像转换成double类型的图像,方便后面的8*8分块DCT变换 blkproc_DCT(doubleImg); //对原图片做8*8分块DCT变换 //分别进行区域编码和阈值编码 Mat doubleImgRegion, doubleImgThreshold; doubleImgRegion = doubleImg.clone(); doubleImgThreshold = doubleImg.clone(); regionalCoding(doubleImgRegion); //对DCT变换后的系数进行区域编码 thresholdCoding(doubleImgThreshold); //对DCT变换后的系数进行阈值编码 //进行逆DCT变换 Mat ucharImgRegion, ucharImgThreshold, differenceimage; ucharImgRegion = blkproc_IDCT(doubleImgRegion); //namedWindow("RegionalCoding", CV_WINDOW_AUTOSIZE); imshow("RegionalCoding", ucharImgRegion); ucharImgThreshold = blkproc_IDCT(doubleImgThreshold); //namedWindow("ThresholdCoding", CV_WINDOW_AUTOSIZE); imshow("ThresholdCoding", ucharImgThreshold); absdiff(ucharImgRegion, OrignalImg, differenceimage); imshow("两幅图像的差值",differenceimage); } void blkproc_DCT(Mat doubleImgTmp) { Mat ucharImgTmp; Mat DCTMat = Mat(8, 8, CV_64FC1); //用于DCT变换的8*8的矩阵 Mat DCTMatT; //DCTMat矩阵的转置 Mat ROIMat = Mat(8, 8, CV_64FC1); //用于分块处理的时候在原图像上面移动 double a = 0, q; //DCT变换的系数 for (int i = 0; i < DCTMat.rows; i++) { for (int j = 0; j < DCTMat.cols; j++) { if (i == 0) { a = pow(1.0 / DCTMat.rows, 0.5); } else { a = pow(2.0 / DCTMat.rows, 0.5); } q = ((2 * j + 1)*i*M_PI) / (2 * DCTMat.rows); DCTMat.at(i, j) = a * cos(q); } } DCTMatT = DCTMat.t(); //ROIMat在doubleImgTmp以8为步长移动,达到与Matlab中的分块处理函数blkproc相同的效果 //此程序中,若图片的高或者宽不是8的整数倍的话,最后的不足8的部分不进行处理 int rNum = doubleImgTmp.rows / 8; int cNum = doubleImgTmp.cols / 8; for (int i = 0; i < rNum; i++) { for (int j = 0; j < cNum; j++) { ROIMat = doubleImgTmp(Rect(j * 8, i * 8, 8, 8)); ROIMat = DCTMat * ROIMat*DCTMatT; } } doubleImgTmp.convertTo(ucharImgTmp, CV_8U); imshow("DCTImg", ucharImgTmp); } Mat blkproc_IDCT(Mat doubleImgTmp) { //与blkproc_DCT几乎一样,唯一的差别在于:ROIMat = DCTMatT*ROIMat*DCTMat(转置矩阵DCTMatT和DCTMat交换了位置) Mat ucharImgTmp; Mat DCTMat = Mat(8, 8, CV_64FC1); Mat DCTMatT; Mat ROIMat = Mat(8, 8, CV_64FC1); double a = 0, q; for (int i = 0; i < DCTMat.rows; i++) { for (int j = 0; j < DCTMat.cols; j++) { if (i == 0) { a = pow(1.0 / DCTMat.rows, 0.5); } else { a = pow(2.0 / DCTMat.rows, 0.5); } q = ((2 * j + 1)*i*M_PI) / (2 * DCTMat.rows); DCTMat.at (i, j) = a * cos(q); } } DCTMatT = DCTMat.t(); int rNum = doubleImgTmp.rows / 8; int cNum = doubleImgTmp.cols / 8; for (int i = 0; i < rNum; i++) { for (int j = 0; j < cNum; j++) { ROIMat = doubleImgTmp(Rect(j * 8, i * 8, 8, 8)); ROIMat = DCTMatT * ROIMat*DCTMat; } } doubleImgTmp.convertTo(ucharImgTmp, CV_8U); return ucharImgTmp; } void regionalCoding(Mat doubleImgTmp) { int rNum = doubleImgTmp.rows / 8; int cNum = doubleImgTmp.cols / 8; Mat ucharImgTmp; Mat ROIMat = Mat(8, 8, CV_64FC1); //用于分块处理的时候在原图像上面移动 for (int i = 0; i < rNum; i++) { for (int j = 0; j < cNum; j++) { ROIMat = doubleImgTmp(Rect(j * 8, i * 8, 8, 8)); for (int r = 0; r < ROIMat.rows; r++) { for (int c = 0; c < ROIMat.cols; c++) { //8*8块中,后四行置0 if (r > 4) { ROIMat.at (r, c) = 0.0; } } } } } doubleImgTmp.convertTo(ucharImgTmp, CV_8U); imshow("regionalCodingImg", ucharImgTmp); } void thresholdCoding(Mat doubleImgTmp) { int rNum = doubleImgTmp.rows / 8; int cNum = doubleImgTmp.cols / 8; double medianNumTmp = 0; Mat ucharImgTmp; Mat ROIMat = Mat(8, 8, CV_64FC1); //用于分块处理的时候在原图像上面移动 for (int i = 0; i < rNum; i++) { for (int j = 0; j < cNum; j++) { ROIMat = doubleImgTmp(Rect(j * 8, i * 8, 8, 8)); medianNumTmp = get_medianNum(ROIMat); for (int r = 0; r < ROIMat.rows; r++) { for (int c = 0; c < ROIMat.cols; c++) { if (abs(ROIMat.at (r, c)) < 0) { ROIMat.at (r, c) = 0; } } } } } doubleImgTmp.convertTo(ucharImgTmp, CV_8U); imshow("thresholdCodingImg", ucharImgTmp); } double get_medianNum(Mat & imageROI) //获取矩阵的中值 { vector vectorTemp; double tmpPixelValue = 0; for (int i = 0; i < imageROI.rows; i++) //将感兴趣区域矩阵拉成一个向量 { for (int j = 0; j < imageROI.cols; j++) { vectorTemp.push_back(abs(imageROI.at (i, j))); } } for (int i = 0; i < vectorTemp.size() / 2; i++) //进行排序 { for (int j = i + 1; j < vectorTemp.size(); j++) { if (vectorTemp.at(i) > vectorTemp.at(j)) { double temp; temp = vectorTemp.at(i); vectorTemp.at(i) = vectorTemp.at(j); vectorTemp.at(j) = temp; } } } return vectorTemp.at(vectorTemp.size() / 2 - 1); //返回中值 } 效果图如下:
-
-
-
-

-
-
-
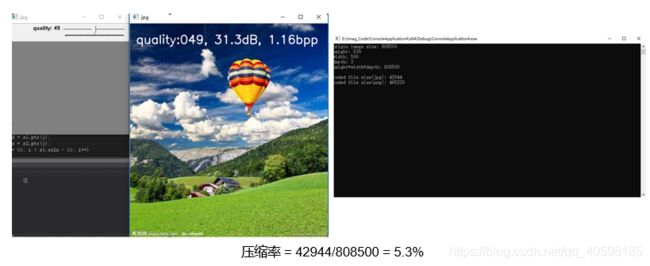
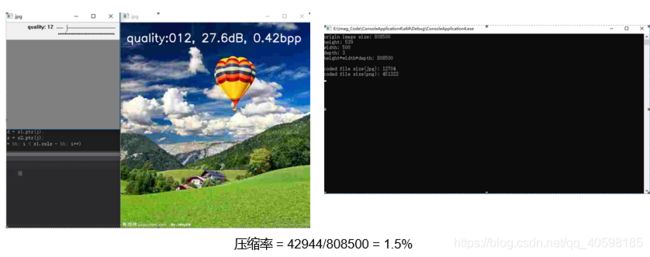
(3)、图像JPEG的压缩:
-
所用到的库函数:
CV_EXPORTS_W Mat imdecode( InputArray buf, int flags );程序如下:
/*JPEG图片压缩*/ double getPSNR(Mat& src1, Mat& src2, int bb = 0); void ImageCompression_JPEG(Mat &src) { //Mat src = imread("lena.png"); cout << "origin image size: " << src.dataend - src.datastart << endl; cout << "height: " << src.rows << endl << "width: " << src.cols << endl << "depth: " << src.channels() << endl; cout << "height*width*depth: " << src.rows*src.cols*src.channels() << endl << endl; //(1) jpeg compression vectorbuff;//buffer for coding vector param = vector (2); param[0] = CV_IMWRITE_JPEG_QUALITY; param[1] = 1;//default(95) 0-100 imencode(".jpg", src, buff, param); cout << "coded file size(jpg): " << buff.size() << endl;//fit buff size automatically. Mat jpegimage = imdecode(Mat(buff), CV_LOAD_IMAGE_COLOR); //(2) png compression param[0] = CV_IMWRITE_PNG_COMPRESSION; param[1] = 8;//default(3) 0-9. imencode(".png", src, buff, param); cout << "coded file size(png): " << buff.size() << endl; Mat pngimage = imdecode(Mat(buff), CV_LOAD_IMAGE_COLOR); //(3) intaractive jpeg compression char name[64]; namedWindow("jpg"); int q = 95; createTrackbar("quality", "jpg", &q, 100); int key = 0; while (key != 'q') { param[0] = CV_IMWRITE_JPEG_QUALITY; param[1] = q; imencode(".jpg", src, buff, param); Mat show = imdecode(Mat(buff), CV_LOAD_IMAGE_COLOR); double psnr = getPSNR(src, show);//get PSNR double bpp = 8.0*buff.size() / (show.size().area());//bit/pixe; sprintf_s(name, "quality:%03d, %.1fdB, %.2fbpp", q, psnr, bpp); putText(show, name, Point(15, 50), FONT_HERSHEY_SIMPLEX, 1, CV_RGB(255, 255, 255), 2); imshow("jpg", show); key = waitKey(33); if (key == 's') { //(4) data writing sprintf_s(name, "q%03d_%.2fbpp.png", q, bpp); imwrite(name, show); sprintf_s(name, "q%03d_%.2fbpp.jpg", q, bpp); param[0] = CV_IMWRITE_JPEG_QUALITY; param[1] = q; imwrite(name, src, param);; } } } double getPSNR(Mat& src1, Mat& src2, int bb) { int i, j; double sse, mse, psnr; sse = 0.0; Mat s1, s2; cvtColor(src1, s1, CV_BGR2GRAY); cvtColor(src2, s2, CV_BGR2GRAY); int count = 0; for (j = bb; j < s1.rows - bb; j++) { uchar* d = s1.ptr(j); uchar* s = s2.ptr(j); for (i = bb; i < s1.cols - bb; i++) { sse += ((d[i] - s[i])*(d[i] - s[i])); count++; } } if (sse == 0.0 || count == 0) { return 0; } else { mse = sse / (double)(count); psnr = 10.0*log10((255 * 255) / mse); return psnr; } } 效果图如下:
-
-
-

-

-
主函数如下:
#pragma warning(disable:4996) #include "opencv2/opencv.hpp" #include "opencv2/core/core.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgproc.hpp" #include "iostream" #include "fstream" #include "regex" #include "string.h" #include "time.h" #include "Windows.h" #include "math.h" #include "stdio.h" #define WINDOW_NAME "(【程序窗口1】)" #define MAX_CHARS 256//最大字符数 #define MAX_SIZE 1000000 #define M_PI 3.141592653 using namespace cv; using namespace std; const double EPS = 1e-12; const double PI = 3.141592653; class tmpNode { public: unsigned char uch;//取值范围是0~255,用来表示一个8位的字符 unsigned long freq = 0;//字符出现的频率 }; int main() { //Mat img = imread("3.jpg", CV_LOAD_IMAGE_GRAYSCALE); //Mat img = imread("3.jpg", 1); //Mat img = imread("3.jpg",0); //Mat img = imread("1.jpg"); // //Mat img_1 = imread("p3-01-00_Huffman_Decode.bmp"); //Mat differenceimage; //absdiff(img, img_1, differenceimage); /*if (img.empty()) { std::cout << "图片读取失败!" << "\n"; return -1; }*/ //namedWindow("【原始图像】", CV_WINDOW_AUTOSIZE); //imshow("【原始图像】", img); //namedWindow("【压缩后解码图像】", CV_WINDOW_AUTOSIZE); //imshow("【压缩后解码图像】", img_1); /*计算直方图判断噪声并且选择相应的滤波器进行滤波*/ //Mat dstImage = GaussianBlurfilterfunction(img); //Mat dstImage = Blurefilterfunction(img); //Mat dstImage = MedianBlurfilterfunction(img); //Mat dstImage = BilateralBlurfilterfunction(img); //Mat dstImage = Inversefiltering(img); //namedWindow("【逆滤波图像】", CV_WINDOW_AUTOSIZE); //imshow("【逆滤波图像】", dstImage); //Mat img1 = img.clone(); //Drawing_one_dimensionalhistogram(img1); //Otsusegmentation(img); //Graphcutfunction(img); //Watershedfunction(img); //ImageCompression(); //ImageCompression_DCT(img); //ImageCompression_JPEG(img); //Huffmanfunction(); //Mat dstImg = FrequencyDomainGaussFiltering(img); //Drawing_one_dimensionalhistogram(dstImg); //grathcutfunctiong(img); //namedWindow("【原始图像】", CV_WINDOW_AUTOSIZE); //imshow("【原始图像】", img); //namedWindow("【差值图像】", CV_WINDOW_AUTOSIZE); //imshow("【差值图像】", differenceimage); waitKey(0); //destroyAllWindows(); return 0; }完。