nerf-pytorch3D 代码详细流程 debug
train_nerf.py
- import
- main
-
- config内容
- model
- class RadianceFieldRenderer
-
- def __init__
- 分"coarse", "fine"设置函数
- if render_pass == "coarse":
-
- raysampler
-
- class NeRFRaysampler
- self._renderer
- self._implicit_function
- class NeuralRadianceField
-
- 定义谐波函数
- 定义mlp_xyz 用 MLPWithInputSkips
- 定义中间层self.intermediate_linear
- 定义密度层self.density_layer,用于输出密度
- 定义颜色层self.density_layer,用于输出rgb颜色
- NeuralRadianceField总值
- if render_pass == "fine":
-
- raysampler
- RadianceFieldRenderer总值
- stats object
-
- class Stats:
-
- def __init__
- def hard_reset(self, epoch: int = -1) -> None
- def reset(self) -> None
- 学习率scheduler 设置
- 可视化设置
- 数据集
-
- 1、加载training/validation数据。
- def get_nerf_datasets
- class ListDataset(Dataset)
- debug
- 2、 预缓存投影光线
- model.precache_rays
- 3、train_dataloader、val_dataloader
- 训练
- epoch循环
-
- batch循环
-
- 1、提取数据
- 2、运行模型
-
- model. self
- chunk_outputs
- metrics
- 3、loss
- 4、stats
- 5、可视化更新
- 调整学习速度。
- 验证
- Checkpoint
- nerf
- nerf_renderer.py
-
- class RadianceFieldRenderer
- def precache_rays
- def _process_ray_chunk
- def forward
- implicit_function.py
-
- class MLPWithInputSkips
-
- def init
- class NeuralRadianceField
-
- def __init__
- 其他函数
- raysampler.py
-
- class ProbabilisticRaysampler
-
- def __init__
- def forward
- class NeRFRaysampler 其他函数
-
- def __init__
- def precache_rays
-
- debug
- def get_n_chunks
- def forword
-
- debug
- def _normalize_raybundle
- def _print_precaching_progress
- raymarcher.py
-
- EmissionAbsorptionNeRFRaymarcher
- class Stats 其他函数:
-
- def new_epoch
- update
- pytorch3D
-
- class RayBundle(NamedTuple)
- class NDCMultinomialRaysampler
- class MultinomialRaysampler
- class MonteCarloRaysampler
- renderer
-
- class ImplicitRenderer
-
- volumetric_function 步骤
- class HarmonicEmbedding
-
- def forward
import
import collections
import os
import pickle
import warnings
import hydra
import numpy as np
import torch
from nerf.dataset import get_nerf_datasets, trivial_collate
from nerf.nerf_renderer import RadianceFieldRenderer, visualize_nerf_outputs
from nerf.stats import Stats
from omegaconf import DictConfig
from visdom import Visdom
CONFIG_DIR = os.path.join(os.path.dirname(os.path.realpath(__file__)), "configs") ##获取configs的路径添加进configdir
if __name__ == "__main__":
main()
main
@hydra.main(config_path=CONFIG_DIR, config_name="lego") ##函数修饰器声明
def main(cfg: DictConfig):
# Set the relevant seeds for reproducibility.设置随机数种子
np.random.seed(cfg.seed)
torch.manual_seed(cfg.seed)
# Device on which to run.
if torch.cuda.is_available():
device = "cuda"
else:
warnings.warn(
"Please note that although executing on CPU is supported,"
+ "the training is unlikely to finish in reasonable time."
)
device = "cpu"
config内容
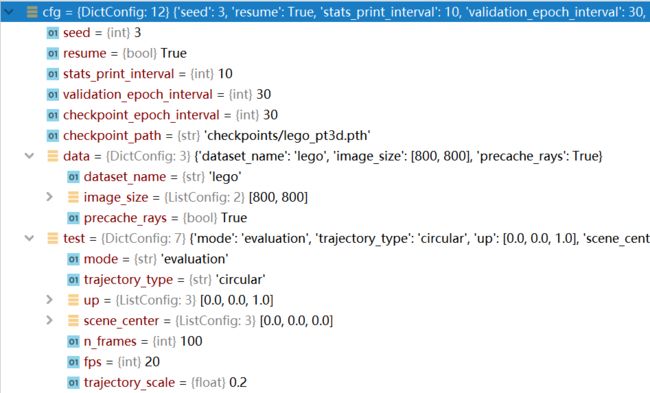
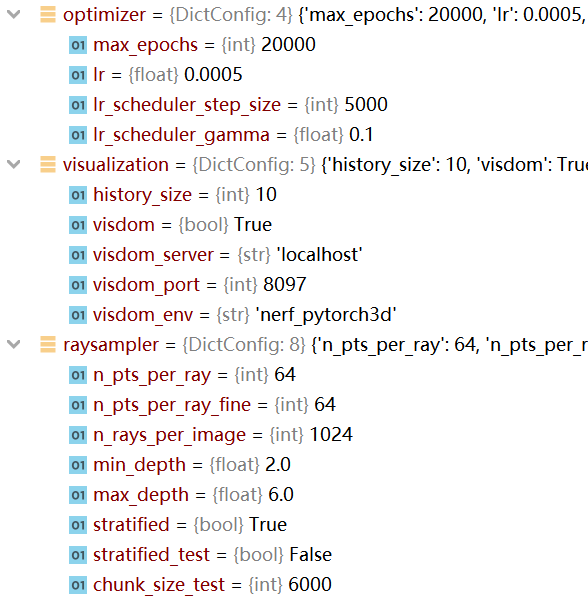

config值
{'seed': 3, 'resume': True, 'stats_print_interval': 10, 'validation_epoch_interval': 30, 'checkpoint_epoch_interval': 30, 'checkpoint_path': 'checkpoints/lego_pt3d.pth', 'data': {'dataset_name': 'lego', 'image_size': [800, 800], 'precache_rays': True}, 'test': {'mode': 'evaluation', 'trajectory_type': 'circular', 'up': [0.0, 0.0, 1.0], 'scene_center': [0.0, 0.0, 0.0], 'n_frames': 100, 'fps': 20, 'trajectory_scale': 0.2}, 'optimizer': {'max_epochs': 20000, 'lr': 0.0005, 'lr_scheduler_step_size': 5000, 'lr_scheduler_gamma': 0.1}, 'visualization': {'history_size': 10, 'visdom': True, 'visdom_server': 'localhost', 'visdom_port': 8097, 'visdom_env': 'nerf_pytorch3d'}, 'raysampler': {'n_pts_per_ray': 64, 'n_pts_per_ray_fine': 64, 'n_rays_per_image': 1024, 'min_depth': 2.0, 'max_depth': 6.0, 'stratified': True, 'stratified_test': False, 'chunk_size_test': 6000}, 'implicit_function': {'n_harmonic_functions_xyz': 10, 'n_harmonic_functions_dir': 4, 'n_hidden_neurons_xyz': 256, 'n_hidden_neurons_dir': 128, 'density_noise_std': 0.0, 'n_layers_xyz': 8}}
model
# Initialize the Radiance Field model.
model = RadianceFieldRenderer(
image_size=cfg.data.image_size,
n_pts_per_ray=cfg.raysampler.n_pts_per_ray, # 每一术光线采样的n个点
n_pts_per_ray_fine=cfg.raysampler.n_pts_per_ray, # 每一束光线采样的n个点 对于fine网络
n_rays_per_image=cfg.raysampler.n_rays_per_image, ##每个图像的n条光束
min_depth=cfg.raysampler.min_depth, # 最近的边界
max_depth=cfg.raysampler.max_depth, # 最远的边界
stratified=cfg.raysampler.stratified, # 分层
stratified_test=cfg.raysampler.stratified_test, # 分层测试
chunk_size_test=cfg.raysampler.chunk_size_test, # 块大小测试
n_harmonic_functions_xyz=cfg.implicit_function.n_harmonic_functions_xyz, # 坐标
n_harmonic_functions_dir=cfg.implicit_function.n_harmonic_functions_dir, # 方向
n_hidden_neurons_xyz=cfg.implicit_function.n_hidden_neurons_xyz, # xyz的隐藏神经元
n_hidden_neurons_dir=cfg.implicit_function.n_hidden_neurons_dir, # 方向的隐藏神经元
n_layers_xyz=cfg.implicit_function.n_layers_xyz, # 坐标n层
density_noise_std=cfg.implicit_function.density_noise_std, # 密度的噪音方差
visualization=cfg.visualization.visdom, # 可视化
)
# Move the model to the relevant device.
model.to(device)
class RadianceFieldRenderer
class RadianceFieldRenderer(torch.nn.Module):
"""
Raybundler->class(orgin, direction, length, xys)
文件实现了 RadianceFieldRenderer类,集成torch.nn.Modulerendering的前向传播过程如下:
1.对于给定的输入 camera,rendering ray 通过“NeRFRaysampler” 产生。
2.在training mode下,射线是一组“n_rays_per_image”的图像网格的随机2D位置。
3.在evaluation mode下,光束对应的是整张图片的网格.光束被进一步分割为“chunk_size_test” 大小的块,以防止内存不足的错误.
渲染前向传递过程如下:
1) 对于给定的输入相机,渲染光线是用
`self._renderer['coarse']` 的 `NeRFRaysampler` 对象。
在训练模式下(`self.training==True`),光线是一组
图像网格的“n_rays_per_image”随机二维位置。
在评估模式下(`self.training==False`),光线对应
到完整的图像网格。光线进一步分裂为
`chunk_size_test`-大小的块,以防止内存不足错误。
2) 对于每个射线点,评估粗略的 `NeuralRadianceField` MLP。
指向此 MLP 的指针存储在 `self._implicit_function['coarse']` 中
3) 粗略的辐射场用`self._renderer['coarse']` 的 `EmissionAbsorptionNeRFRaymarcher` 对象。
4)粗raymarcher输出引导的概率分布用于精细渲染通道的重要性光线采样。这
`ProbabilisticRaysampler` 存储在 `self._renderer['fine'].raysampler` 中
实现重要性光线采样。
5) 类似于 2) `self._implicit_function['fine']` 中的精细 MLP
用占据和颜色标记射线点。
6) self._renderer['fine'].raymarcher` 生成最终的精细渲染。
7) 将精细渲染和粗糙渲染与地面实况输入图像进行比较与 PSNR 和 MSE 指标。
"""
def init

def __init__(
self,
image_size: Tuple[int, int],#高*宽
n_pts_per_ray: int,#在粗渲染过程中,沿着每条光线采样的点数
n_pts_per_ray_fine: int,#在精细渲染过程中,沿着每条光线采样的点数
n_rays_per_image: int,#训练时每张图片的光束数量
min_depth: float,#用于粗渲染的采样射线点的最小深度
max_depth: float,#用于粗渲染的采样射线点的最大深度
stratified: bool,#训练时分层每个光束点的深度
stratified_test: bool,#测试时分层每个光束点的深度
chunk_size_test: int,#每个成像射线块中的射线数,目前此处有些问题 应该是测试时有效?
n_harmonic_functions_xyz: int = 6,#谐波函数嵌入时的3D坐标 就是Positional encode的L
n_harmonic_functions_dir: int = 4,#谐波函数嵌入时的方向值 就是Positional encode的L
n_hidden_neurons_xyz: int = 256,#在MLP全连接层隐藏单元数量,该层接受3D点位置并输出具有中间特征的占用域
n_hidden_neurons_dir: int = 128,#在MLP的完全连接层中,接受中间特征和光线方向并输出亮度场(逐点颜色)的隐藏单元数。(最后一层)
n_layers_xyz: int = 8,##MLP的占用域的输出层数
append_xyz: Tuple[int] = (5,),#占用 MLP 的跳过层的索引列表。在评估跳过层之前,输入到 MLP 的张量附加到跳过层输入。
density_noise_std: float = 0.0,#将随机正态噪声的标准差加到占用MLP的输出上。仅在' self.training==True '时激活。
visualization: bool = False,#是否为可视化存储额外的输出
):
"""
Args:
image_size: The size of the rendered image (`[height, width]`).
n_pts_per_ray: The number of points sampled along each ray for the
coarse rendering pass.
n_pts_per_ray_fine: The number of points sampled along each ray for the
fine rendering pass.
n_rays_per_image: Number of Monte Carlo ray samples when training
(`self.training==True`).
min_depth: The minimum depth of a sampled ray-point for the coarse rendering.
max_depth: The maximum depth of a sampled ray-point for the coarse rendering.
stratified: If `True`, stratifies (=randomly offsets) the depths
of each ray point during training (`self.training==True`).
stratified_test: If `True`, stratifies (=randomly offsets) the depths
of each ray point during evaluation (`self.training==False`).
chunk_size_test: The number of rays in each chunk of image rays.
Active only when `self.training==True`.
n_harmonic_functions_xyz: The number of harmonic functions
used to form the harmonic embedding of 3D point locations.
n_harmonic_functions_dir: The number of harmonic functions
used to form the harmonic embedding of the ray directions.
n_hidden_neurons_xyz: The number of hidden units in the
fully connected layers of the MLP that accepts the 3D point
locations and outputs the occupancy field with the intermediate
features.
n_hidden_neurons_dir: The number of hidden units in the
fully connected layers of the MLP that accepts the intermediate
features and ray directions and outputs the radiance field
(per-point colors).
n_layers_xyz: The number of layers of the MLP that outputs the
occupancy field.
append_xyz: The list of indices of the skip layers of the occupancy MLP.
Prior to evaluating the skip layers, the tensor which was input to MLP
is appended to the skip layer input.
density_noise_std: The standard deviation of the random normal noise
added to the output of the occupancy MLP.
Active only when `self.training==True`.
visualization: whether to store extra output for visualization.
"""
super().__init__()
# The renderers and implicit functions are stored under the fine/coarse
# keys in ModuleDict PyTorch modules.
# 渲染器和隐式函数存储在fine/coarse下
# ModuleDict PyTorch 模块中的键
self._renderer = torch.nn.ModuleDict()##定义render(分coarse和fine) 两个key分别是coarse和fine
self._implicit_function = torch.nn.ModuleDict()##定义网络隐层函数(分coarse和fine), 结构和renderer一致,不过对应的是NeuralRadiencefunction
#self._implicit_function->n_harmonic_function_xyz_dir hidden_neurons_xyz_dir, n_layers, append_xyz
# Init the EA raymarcher used by both passes.
raymarcher = EmissionAbsorptionNeRFRaymarcher()##返回的是特征和权重
# Parse out image dimensions.
image_height, image_width = image_size#800 800
raymarcher 都是用 EmissionAbsorptionNeRFRaymarcher()
分"coarse", "fine"设置函数
if render_pass == “coarse”:
raysampler
粗采样 均匀点采样 用 NeRFRaysampler
细采样 重要性采样 用 ProbabilisticRaysampler
for render_pass in ("coarse", "fine"):
if render_pass == "coarse":
# Initialize the coarse raysampler.
#正常的均匀点采样
raysampler = NeRFRaysampler(
n_pts_per_ray=n_pts_per_ray,##沿每条光线的采样点数
min_depth=min_depth,
max_depth=max_depth,
stratified=stratified,#训练时分层每个光束点的深度
stratified_test=stratified_test,
n_rays_per_image=n_rays_per_image,
image_height=image_height,
image_width=image_width,
)
elif render_pass == "fine":
#重要性采样
# Initialize the fine raysampler.
raysampler = ProbabilisticRaysampler(
n_pts_per_ray=n_pts_per_ray_fine,
stratified=stratified,
stratified_test=stratified_test,
)
else:
raise ValueError(f"No such rendering pass {render_pass}")
class NeRFRaysampler
1、训练时 随机采样 。
2、测试时 采样整个图像网格。同时 采用 分块策略 可防止内存不足
3、对光线进行 预缓存 可加快 NeRF采样速度
class NeRFRaysampler(torch.nn.Module):
"""
实现 NeRF 的光线采样器。
根据 `self.training` 标志,光线采样器要么采样一大块随机光线(`self.training==True`),或返回光线子集完整的图像网格(`self.training==False`)。
射线的分块允许有效地评估NeRF隐式表面函数,而不会遇到GPU内存错误。
此外,此光线采样器支持光线束的预缓存,对于一组输入相机(`self.precache_rays`),在训练之前预先缓存光线可以大大加快随后 训练 NeRF 迭代的射线采样步骤 的处理速度
"""

def __init__(
self,
n_pts_per_ray: int,
min_depth: float,
max_depth: float,
n_rays_per_image: int,
image_width: int,
image_height: int,
stratified: bool = False,
stratified_test: bool = False,
):
"""
Args:
n_pts_per_ray:沿每条射线采样的点数。
min_depth:射线点的最小深度。
max_depth:射线点的最大深度。
n_rays_per_image:训练时的蒙特卡洛射线样本数
(`self.training==True`)。
image_width:图像网格的水平尺寸。
image_height:图像网格的垂直尺寸。
stratified:如果“真”,分层(=随机偏移)深度
训练期间的每个射线点(`self.training==True`)。
stratified_test:如果为“真”,则分层(=随机偏移)深度
评估期间的每个射线点(`self.training==False`)。
"""
super().__init__()
self._stratified = stratified
self._stratified_test = stratified_test
# Initialize the grid ray sampler.初始化网格射线采样器
self._grid_raysampler = NDCMultinomialRaysampler(
image_width=image_width,
image_height=image_height,
n_pts_per_ray=n_pts_per_ray,
min_depth=min_depth,
max_depth=max_depth,
)
# Initialize the Monte Carlo ray sampler.
self._mc_raysampler = MonteCarloRaysampler(
min_x=-1.0,
max_x=1.0,
min_y=-1.0,
max_y=1.0,
n_rays_per_image=n_rays_per_image,
n_pts_per_ray=n_pts_per_ray,
min_depth=min_depth,
max_depth=max_depth,
)
# create empty ray cache 创建新的光线缓存
self._ray_cache = {}
初始化网格射线采样器
self._grid_raysampler = NDCMultinomialRaysampler
初始化Monte Carlo ray sampler.
self._mc_raysampler = MonteCarloRaysampler
NDCMultinomialRaysampler
MonteCarloRaysampler
见pytorch3D
self._renderer
ImplicitRenderer 见pytorch3D
# Initialize the fine/coarse renderer.初始化fine/coarse render
self._renderer[render_pass] = ImplicitRenderer(
raysampler=raysampler,
raymarcher=raymarcher,
)
self._implicit_function
# Instantiate the fine/coarse NeuralRadianceField module.网络实例化
self._implicit_function[render_pass] = NeuralRadianceField(
n_harmonic_functions_xyz=n_harmonic_functions_xyz,
n_harmonic_functions_dir=n_harmonic_functions_dir,
n_hidden_neurons_xyz=n_hidden_neurons_xyz,
n_hidden_neurons_dir=n_hidden_neurons_dir,
n_layers_xyz=n_layers_xyz,
append_xyz=append_xyz,
)
self._density_noise_std = density_noise_std
self._chunk_size_test = chunk_size_test
self._image_size = image_size
self.visualization = visualization
class NeuralRadianceField
详细代码见下面implicit_function.py模块

定义谐波函数
HarmonicEmbedding 见pytorch3D

定义mlp_xyz 用 MLPWithInputSkips
self.mlp_xyz = MLPWithInputSkips(##使用多层感知机
n_layers_xyz,
embedding_dim_xyz,
n_hidden_neurons_xyz,
embedding_dim_xyz,
n_hidden_neurons_xyz,
input_skips=append_xyz,
)
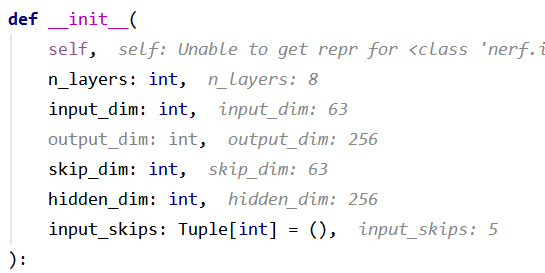
class MLPWithInputSkips
class MLPWithInputSkips(torch.nn.Module):
"""
实现神经辐射场的多层感知器架构。
因此,`MLPWithInputSkips` 是一个多层感知器,包括
具有 ReLU 激活的线性层序列。
Additionally, for a set of predefined layers `input_skips`, the forward pass
appends a skip tensor `z` to the output of the preceding layer.
此外,对于一组预定义层 `input_skips`,前向传递
在前一层的输出上附加一个跳过张量“z”。
Note that this follows the architecture described in the Supplementary
Material (Fig. 7) of [1].
References:
[1] Ben Mildenhall and Pratul P. Srinivasan and Matthew Tancik
and Jonathan T. Barron and Ravi Ramamoorthi and Ren Ng:
NeRF: Representing Scenes as Neural Radiance Fields for View
Synthesis, ECCV2020
"""
def __init__(
self,
n_layers: int,
input_dim: int,
output_dim: int,
skip_dim: int,
hidden_dim: int,
input_skips: Tuple[int] = (),
):
"""
Args:
n_layers: The number of linear layers of the MLP.
input_dim: The number of channels of the input tensor.
output_dim: The number of channels of the output.
skip_dim: The number of channels of the tensor `z` appended when
evaluating the skip layers.
hidden_dim: The number of hidden units of the MLP.
input_skips: The list of layer indices at which we append the skip
tensor `z`.
"""
super().__init__()
layers = []
for layeri in range(n_layers):
if layeri == 0:
dimin = input_dim
dimout = hidden_dim
elif layeri in input_skips:
dimin = hidden_dim + skip_dim
dimout = hidden_dim
else:
dimin = hidden_dim
dimout = hidden_dim
linear = torch.nn.Linear(dimin, dimout)
_xavier_init(linear)
layers.append(torch.nn.Sequential(linear, torch.nn.ReLU(True)))
self.mlp = torch.nn.ModuleList(layers)
self._input_skips = set(input_skips)
self.mlp_xyz的值
MLPWithInputSkips(
(mlp): ModuleList(
(0): Sequential(
(0): Linear(in_features=63, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(1): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(2): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(3): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(4): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(5): Sequential(
(0): Linear(in_features=319, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(6): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(7): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
)
)
定义中间层self.intermediate_linear
self.intermediate_linear = torch.nn.Linear(
n_hidden_neurons_xyz, n_hidden_neurons_xyz
)
_xavier_init(self.intermediate_linear)

定义密度层self.density_layer,用于输出密度
self.density_layer = torch.nn.Linear(n_hidden_neurons_xyz, 1)#生成一个密度
_xavier_init(self.density_layer)
# Zero the bias of the density layer to avoid
# a completely transparent initialization.
# 将密度层的偏差归零以避免
# 一个完全透明的初始化。
self.density_layer.bias.data[:] = 0.0 # fixme: Sometimes this is not enough
定义颜色层self.density_layer,用于输出rgb颜色
self.color_layer = torch.nn.Sequential(
LinearWithRepeat(#输入是经过mlp全连接层后的中间特征和位置编码过后的direction
n_hidden_neurons_xyz + embedding_dim_dir, n_hidden_neurons_dir
),#输出是光线上每个点的特征以及该光线方向编码特征
torch.nn.ReLU(True),
torch.nn.Linear(n_hidden_neurons_dir, 3),
torch.nn.Sigmoid(),
)##获得一个rays_rgb图像
self.use_multiple_streams = use_multiple_streams
NeuralRadianceField总值
NeuralRadianceField(
(harmonic_embedding_xyz): HarmonicEmbedding()
(harmonic_embedding_dir): HarmonicEmbedding()
(mlp_xyz): MLPWithInputSkips(
(mlp): ModuleList(
(0): Sequential(
(0): Linear(in_features=63, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(1): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(2): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(3): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(4): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(5): Sequential(
(0): Linear(in_features=319, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(6): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(7): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
)
)
(intermediate_linear): Linear(in_features=256, out_features=256, bias=True)
(density_layer): Linear(in_features=256, out_features=1, bias=True)
(color_layer): Sequential(
(0): LinearWithRepeat()
(1): ReLU(inplace=True)
(2): Linear(in_features=128, out_features=3, bias=True)
(3): Sigmoid()
)
)
if render_pass == “fine”:
raysampler
elif render_pass == "fine":
#重要性采样
# Initialize the fine raysampler.
raysampler = ProbabilisticRaysampler(
n_pts_per_ray=n_pts_per_ray_fine,
stratified=stratified,
stratified_test=stratified_test,
)

RadianceFieldRenderer总值
RadianceFieldRenderer(
(_renderer): ModuleDict(
(coarse): ImplicitRenderer(
(raysampler): NeRFRaysampler(
(_grid_raysampler): NDCMultinomialRaysampler()
(_mc_raysampler): MonteCarloRaysampler()
)
(raymarcher): EmissionAbsorptionNeRFRaymarcher()
)
(fine): ImplicitRenderer(
(raysampler): ProbabilisticRaysampler()
(raymarcher): EmissionAbsorptionNeRFRaymarcher()
)
)
(_implicit_function): ModuleDict(
(coarse): NeuralRadianceField(
(harmonic_embedding_xyz): HarmonicEmbedding()
(harmonic_embedding_dir): HarmonicEmbedding()
(mlp_xyz): MLPWithInputSkips(
(mlp): ModuleList(
(0): Sequential(
(0): Linear(in_features=63, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(1): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(2): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(3): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(4): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(5): Sequential(
(0): Linear(in_features=319, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(6): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(7): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
)
)
(intermediate_linear): Linear(in_features=256, out_features=256, bias=True)
(density_layer): Linear(in_features=256, out_features=1, bias=True)
(color_layer): Sequential(
(0): LinearWithRepeat()
(1): ReLU(inplace=True)
(2): Linear(in_features=128, out_features=3, bias=True)
(3): Sigmoid()
)
)
(fine): NeuralRadianceField(
(harmonic_embedding_xyz): HarmonicEmbedding()
(harmonic_embedding_dir): HarmonicEmbedding()
(mlp_xyz): MLPWithInputSkips(
(mlp): ModuleList(
(0): Sequential(
(0): Linear(in_features=63, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(1): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(2): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(3): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(4): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(5): Sequential(
(0): Linear(in_features=319, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(6): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(7): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
)
)
(intermediate_linear): Linear(in_features=256, out_features=256, bias=True)
(density_layer): Linear(in_features=256, out_features=1, bias=True)
(color_layer): Sequential(
(0): LinearWithRepeat()
(1): ReLU(inplace=True)
(2): Linear(in_features=128, out_features=3, bias=True)
(3): Sigmoid()
)
)
)
)
stats object
# Init the stats object.
if stats is None:
stats = Stats(
["loss", "mse_coarse", "mse_fine", "psnr_coarse", "psnr_fine", "sec/it"],
)
class Stats:
def init
class Stats:
"""
统计日志对象,用于收集在PyTorch中训练深度网络的统计数据。
Example:
```
# 初始化统计数据结构,用于记录统计数据“objective”和“top1e”.
stats = Stats( ('objective','top1e') )
network = init_net() # init a pytorch module (=neural network)
dataloader = init_dataloader() # init a dataloader
for epoch in range(10):
# start of epoch -> call new_epoch
stats.new_epoch()
# Iterate over batches.
for batch in dataloader:
# 运行模型并将其保存到输出变量的“output”中。
output = network(batch)
# stats.update() 自动解析 the 'objective' and 'top1e'
# from the "output" dict 并把这个存储在数据库里。
stats.update(output)
stats.print() # 打印给定epoch的平均值
# Stores the training plots into '/tmp/epoch_stats.pdf'
# 并绘制成运行在localhost上的Visdom服务器(如果运行的话)。
stats.plot_stats(plot_file='/tmp/epoch_stats.pdf')
```
"""
def __init__(
self,
log_vars: List[str],
verbose: bool = False,
epoch: int = -1,
plot_file: Optional[str] = None,
) -> None:
"""
Args:
log_vars: 要记录的变量名列表。
verbose: 打印状态信息。
epoch: The initial epoch of the object.
plot_file: The path to the file that will hold the training plots.
"""
self.verbose = verbose
self.log_vars = log_vars
self.plot_file = plot_file
self.hard_reset(epoch=epoch)

def hard_reset(self, epoch: int = -1) -> None
self.hard_reset(epoch=epoch)
def hard_reset(self, epoch: int = -1) -> None:
"""
删除所有记录的数据。
"""
self._epoch_start = None
self.epoch = epoch
if self.verbose:
print("stats: epoch %d - hard reset" % self.epoch)
self.stats = {}
self.reset()
def reset(self) -> None
self.reset()
def reset(self) -> None:
"""
在一个epoch 之前调用以清除当前的epoch缓冲区。
"""
stat_sets = list(self.stats.keys())
if self.verbose:
print("stats: epoch %d - reset" % self.epoch)
self.it = {k: -1 for k in stat_sets}
for stat_set in stat_sets:
for stat in self.stats[stat_set]:
self.stats[stat_set][stat].reset()
# 设置一个新的时间戳。
self._epoch_start = time.time()

学习率scheduler 设置
learning rate: current_lr = base_lr * gamma ** (epoch / step_size)
# 学习速率调度器设置.
# 在原始代码之后, we use exponential decay of the#指数衰减
# learning rate: current_lr = base_lr * gamma ** (epoch / step_size)
def lr_lambda(epoch): ##定义学习率指数衰减
return cfg.optimizer.lr_scheduler_gamma ** (
epoch / cfg.optimizer.lr_scheduler_step_size
)
# The learning rate scheduling is implemented with LambdaLR PyTorch scheduler.
# 利用学习率调度器实现lr——lambda的指数衰减学习率
lr_scheduler = torch.optim.lr_scheduler.LambdaLR(
optimizer, lr_lambda, last_epoch=start_epoch - 1, verbose=False
)
可视化设置
# 初始化缓存,以存储可视化所需的变量
visuals_cache = collections.deque(maxlen=cfg.visualization.history_size)
# Init the visualization visdom env.
if cfg.visualization.visdom:
viz = Visdom(
server=cfg.visualization.visdom_server,
port=cfg.visualization.visdom_port,
use_incoming_socket=False,
)
else:
viz = None
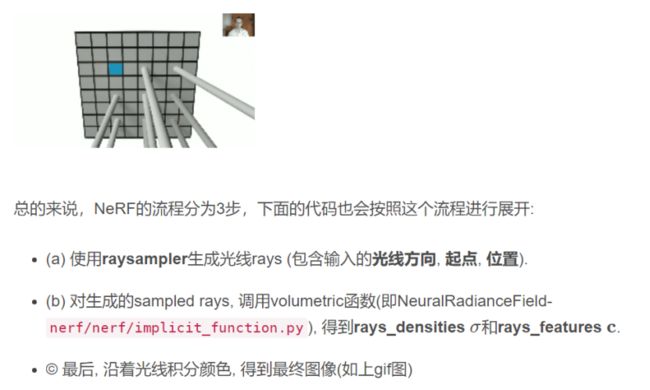
![]()
数据集
1、加载training/validation数据。
# Load the training/validation data.
train_dataset, val_dataset, _ = get_nerf_datasets(
dataset_name=cfg.data.dataset_name,
image_size=cfg.data.image_size, # 加载初始化中的训练集和验证集
)
def get_nerf_datasets
##返回图像, 相机参数, 相机编号3个组成的数据结构
def get_nerf_datasets(
dataset_name: str, # 'lego | fern' 给定具体的场景
image_size: Tuple[int, int], #图像的尺寸(height,width)
data_root: str = DEFAULT_DATA_ROOT, #数据的网络连接
autodownload: bool = True, #根据网络连接对数据直接进行下载
) -> Tuple[Dataset, Dataset, Dataset]: ##返回训练集,验证集,测试集
"""
获取使用“dataset_name”参数指定的数据集的training and validation DataSet对象
Args:
dataset_name: 要加载的数据集的名称。
image_size: 表示加载的数据集图像大小的元组(高度、宽度)。
data_root: 存储数据的根文件夹。
autodownload: 自动下载数据集文件,以防它们丢失。
Returns:
train_dataset: The training dataset object.
val_dataset: The validation dataset object.
test_dataset: The testing dataset object.
"""
if dataset_name not in ALL_DATASETS:
raise ValueError(f"'{dataset_name}'' does not refer to a known dataset.")
print(f"Loading dataset {dataset_name}, image size={str(image_size)} ...")
cameras_path = os.path.join(data_root, dataset_name + ".pth")#cameras_path
image_path = cameras_path.replace(".pth", ".png")#image_path
if autodownload and any(not os.path.isfile(p) for p in (cameras_path, image_path)):
# Automatically download the data files if missing.自动下载缺失的数据
download_data((dataset_name,), data_root=data_root)
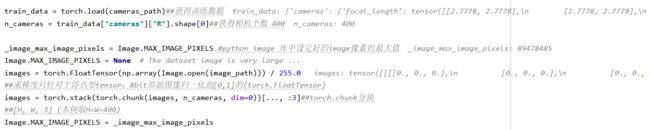
train_data = torch.load(cameras_path)##获得训练数据
n_cameras = train_data["cameras"]["R"].shape[0]##获得相机个数 400
_image_max_image_pixels = Image.MAX_IMAGE_PIXELS #python image 库中设定好的image像素的最大值
Image.MAX_IMAGE_PIXELS = None # The dataset image is very large ...
images = torch.FloatTensor(np.array(Image.open(image_path))) / 255.0
##求梯度只针对于浮点型tensor,8bit原始图像归一化到[0,1]的(torch.FloatTensor)
images = torch.stack(torch.chunk(images, n_cameras, dim=0))[..., :3]##torch.chunk分块
##[H, W, 3] (本例取H=W=400)
Image.MAX_IMAGE_PIXELS = _image_max_image_pixels
#确定图像的放缩比例 并调整图像
scale_factors = [s_new / s for s, s_new in zip(images.shape[1:3], image_size)]
if abs(scale_factors[0] - scale_factors[1]) > 1e-3:
raise ValueError(
"Non-isotropic scaling is not allowed. Consider changing the 'image_size' argument."
)
scale_factor = sum(scale_factors) * 0.5
if scale_factor != 1.0:
print(f"Rescaling dataset (factor={scale_factor})")
images = torch.nn.functional.interpolate(
images.permute(0, 3, 1, 2),
size=tuple(image_size),
mode="bilinear",
).permute(0, 2, 3, 1)##通过插值进行缩放
#camera是pytorch3d.renderer.cameras.PerspectiveCameras的实例
#主要用到的是旋转矩阵R,平移矩阵T,焦距和主视点
cameras = [
PerspectiveCameras(
**{k: v[cami][None] for k, v in train_data["cameras"].items()}
).to("cpu") ##提取train_data信息到cameras中
for cami in range(n_cameras)##共建立n_cameras个相机实例
]
##将train_data划分为train, val, test
train_idx, val_idx, test_idx = train_data["split"]
train_dataset, val_dataset, test_dataset = [
ListDataset(
[
{"image": images[i], "camera": cameras[i], "camera_idx": int(i)}
for i in idx
]
)
for idx in [train_idx, val_idx, test_idx]
]
return train_dataset, val_dataset, test_dataset
class ListDataset(Dataset)
class ListDataset(Dataset):
"""
由entries(条目)列表组成的简单数据集。
"""
def __init__(self, entries: List) -> None:
"""
Args:
entries: The list of dataset entries.
"""
self._entries = entries
def __len__(
self,
) -> int:
return len(self._entries)
def __getitem__(self, index):
return self._entries[index] ##直接获取该索引对应的列表内容
debug
![]()
train_data
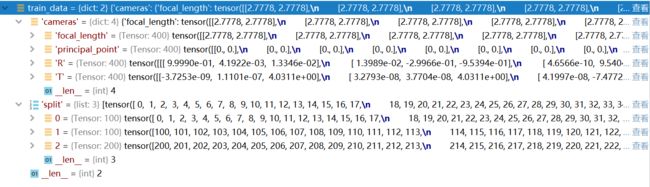
images = torch.stack(torch.chunk(images, n_cameras, dim=0))[…, :3]##torch.chunk分块


scale_factors![]()
![]()





2、 预缓存投影光线
if cfg.data.precache_rays:
# Precache the projection rays.预缓存投影光线
model.eval() # 不启用 batchnorm and dropout
with torch.no_grad():
for dataset in (train_dataset, val_dataset):
cache_cameras = [e["camera"].to(device) for e in dataset]
cache_camera_hashes = [e["camera_idx"] for e in dataset]
# 把 dataset中的camera和camera_idx拿出来进行缓存
model.precache_rays(cache_cameras, cache_camera_hashes)


model.precache_rays
model.precache_rays(cache_cameras, cache_camera_hashes)
def precache_rays(
self,
cache_cameras: List[CamerasBase], #precache ray的n个camera的列表
cache_camera_hashes: List[str], #每个相机独特标识符的列表
):
"""
预缓存从相机“cache_cameras”列表中发出的光线,其中每个相机都用相应的哈希唯一标识来自`cache_camera_hashes`。
缓存的光线被移动到 cpu 并存储在 `self._renderer['coarse']._ray_cache`。
缓存具有相同哈希的两个相机时引发 `ValueError`。
参数:
cache_cameras:预先缓存了光线的“N”个摄像机的列表。
cache_camera_hashes:每个唯一标识符的“N”个列表
"""
self._renderer["coarse"].raysampler.precache_rays(##预缓存光线
cache_cameras,
cache_camera_hashes,
)
3、train_dataloader、val_dataloader
train_dataloader = torch.utils.data.DataLoader(
train_dataset,
batch_size=1,
shuffle=True,
num_workers=0,
collate_fn=trivial_collate,
)
# 验证数据器只是一个无休止的随机样本流。
val_dataloader = torch.utils.data.DataLoader(
val_dataset,
batch_size=1,
num_workers=0,
collate_fn=trivial_collate,
sampler=torch.utils.data.RandomSampler(
val_dataset,
replacement=True,
num_samples=cfg.optimizer.max_epochs,
),
)
训练
# 接下来就是正常的训练过程
# Set the model to the training mode.
model.train()
epoch循环
# Run the main training loop.
for epoch in range(start_epoch, cfg.optimizer.max_epochs):
stats.new_epoch() # Init a new epoch.建立一个新的epoch训练
batch循环
1、提取数据
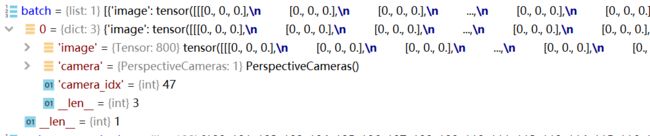
for iteration, batch in enumerate(train_dataloader):
image, camera, camera_idx = batch[0].values() # 第一个epoch对应的值
image = image.to(device)
camera = camera.to(device)
optimizer.zero_grad()
![]()
2、运行模型
执行RadianceFieldRenderer模型的forword文件
代码在上面
# Run the forward pass of the model.
nerf_out, metrics = model(
camera_idx if cfg.data.precache_rays else None,
camera,
image,
)

model. self
RadianceFieldRenderer(
(_renderer): ModuleDict(
(coarse): ImplicitRenderer(
(raysampler): NeRFRaysampler(
(_grid_raysampler): NDCMultinomialRaysampler()
(_mc_raysampler): MonteCarloRaysampler()
)
(raymarcher): EmissionAbsorptionNeRFRaymarcher()
)
(fine): ImplicitRenderer(
(raysampler): ProbabilisticRaysampler()
(raymarcher): EmissionAbsorptionNeRFRaymarcher()
)
)
(_implicit_function): ModuleDict(
(coarse): NeuralRadianceField(
(harmonic_embedding_xyz): HarmonicEmbedding()
(harmonic_embedding_dir): HarmonicEmbedding()
(mlp_xyz): MLPWithInputSkips(
(mlp): ModuleList(
(0): Sequential(
(0): Linear(in_features=63, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(1): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(2): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(3): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(4): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(5): Sequential(
(0): Linear(in_features=319, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(6): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(7): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
)
)
(intermediate_linear): Linear(in_features=256, out_features=256, bias=True)
(density_layer): Linear(in_features=256, out_features=1, bias=True)
(color_layer): Sequential(
(0): LinearWithRepeat()
(1): ReLU(inplace=True)
(2): Linear(in_features=128, out_features=3, bias=True)
(3): Sigmoid()
)
)
(fine): NeuralRadianceField(
(harmonic_embedding_xyz): HarmonicEmbedding()
(harmonic_embedding_dir): HarmonicEmbedding()
(mlp_xyz): MLPWithInputSkips(
(mlp): ModuleList(
(0): Sequential(
(0): Linear(in_features=63, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(1): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(2): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(3): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(4): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(5): Sequential(
(0): Linear(in_features=319, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(6): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
(7): Sequential(
(0): Linear(in_features=256, out_features=256, bias=True)
(1): ReLU(inplace=True)
)
)
)
(intermediate_linear): Linear(in_features=256, out_features=256, bias=True)
(density_layer): Linear(in_features=256, out_features=1, bias=True)
(color_layer): Sequential(
(0): LinearWithRepeat()
(1): ReLU(inplace=True)
(2): Linear(in_features=128, out_features=3, bias=True)
(3): Sigmoid()
)
)
)
)
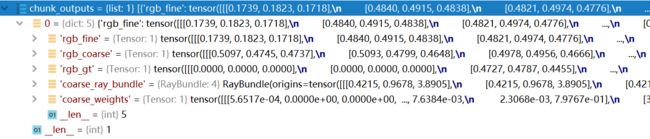
chunk_outputs
metrics
coarse


fine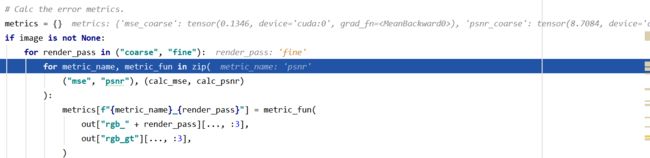
3、loss
# The loss is a sum of coarse and fine MSEs metrics指标
loss = metrics["mse_coarse"] + metrics["mse_fine"]
# Take the training step.
loss.backward()
optimizer.step()
loss:
tensor(0.2945, device='cuda:0', grad_fn=<AddBackward0>)
4、stats
# Update stats with the current metrics.
stats.update(
{"loss": float(loss), **metrics},
stat_set="train",
)
if iteration % cfg.stats_print_interval == 0:
stats.print(stat_set="train") ##每隔10print出来一次
stats
{'train':
{'loss': <nerf.stats.AverageMeter object at 0x7f394e0f2970>,
'mse_coarse': <nerf.stats.AverageMeter object at 0x7f394e104b50>,
'mse_fine': <nerf.stats.AverageMeter object at 0x7f394e0f2850>,
'psnr_coarse': <nerf.stats.AverageMeter object at 0x7f394e0f2070>,
'psnr_fine': <nerf.stats.AverageMeter object at 0x7f394e114730>,
'sec/it': <nerf.stats.AverageMeter object at 0x7f394e129310>}
}

5、可视化更新
# Update the visualization cache.
if viz is not None: ##可视化更新
visuals_cache.append(
{
"camera": camera.cpu(),
"camera_idx": camera_idx,
"image": image.cpu().detach(), ##detach不需要梯度
"rgb_fine": nerf_out["rgb_fine"].cpu().detach(),
"rgb_coarse": nerf_out["rgb_coarse"].cpu().detach(),
"rgb_gt": nerf_out["rgb_gt"].cpu().detach(),
"coarse_ray_bundle": nerf_out["coarse_ray_bundle"],
}
)
调整学习速度。
# Adjust the learning rate.
lr_scheduler.step()
验证
# Validation
if epoch % cfg.validation_epoch_interval == 0 and epoch > 0:
# Sample a validation camera/image.
val_batch = next(val_dataloader.__iter__())
val_image, val_camera, camera_idx = val_batch[0].values()
val_image = val_image.to(device)
val_camera = val_camera.to(device)
# 激活模型的val模式(让我们完成一个完整的渲染传递)。
model.eval()
with torch.no_grad():
val_nerf_out, val_metrics = model(
camera_idx if cfg.data.precache_rays else None,
val_camera,
val_image,
)
# Update stats with the validation metrics. ##更新指标 即损失函数的加权
stats.update(val_metrics, stat_set="val")
stats.print(stat_set="val")
if viz is not None:
# Plot that loss curves into visdom.
stats.plot_stats(
viz=viz,
visdom_env=cfg.visualization.visdom_env,
plot_file=None,
)
# 可视化中间结果。
visualize_nerf_outputs(
val_nerf_out, visuals_cache, viz, cfg.visualization.visdom_env
)
# Set the model back to train mode.
model.train()
Checkpoint
# Checkpoint.
if (
epoch % cfg.checkpoint_epoch_interval == 0
and len(cfg.checkpoint_path) > 0
and epoch > 0
):
print(f"Storing checkpoint {checkpoint_path}.")
data_to_store = {
"model": model.state_dict(),
"optimizer": optimizer.state_dict(),
"stats": pickle.dumps(stats),
}
torch.save(data_to_store, checkpoint_path) ##保存训练模型参数数据到checkpoint
nerf
nerf_renderer.py
class RadianceFieldRenderer
def precache_rays
def precache_rays(
self,
cache_cameras: List[CamerasBase], #precache ray的n个camera的列表
cache_camera_hashes: List[str], #每个相机独特标识符的列表
):
"""
预缓存从相机“cache_cameras”列表中发出的光线,其中每个相机都用相应的哈希唯一标识来自`cache_camera_hashes`。
缓存的光线被移动到 cpu 并存储在 `self._renderer['coarse']._ray_cache`。
缓存具有相同哈希的两个相机时引发 `ValueError`。
参数:
cache_cameras:预先缓存了光线的“N”个摄像机的列表。
cache_camera_hashes:每个唯一标识符的“N”个列表
Precaches the rays emitted from the list of cameras `cache_cameras`,
where each camera is uniquely identified with the corresponding hash
from `cache_camera_hashes`.
The cached rays are moved to cpu and stored in
`self._renderer['coarse']._ray_cache`.
Raises `ValueError` when caching two cameras with the same hash.
Args:
cache_cameras: A list of `N` cameras for which the rays are pre-cached.
cache_camera_hashes: A list of `N` unique identifiers for each
camera from `cameras`.
"""
self._renderer["coarse"].raysampler.precache_rays(##预缓存光线
cache_cameras,
cache_camera_hashes,
)
def _process_ray_chunk
def _process_ray_chunk(
self,
camera_hash: Optional[str],# pre-cached camera的唯一标识符
camera: CamerasBase,# 一批场景被渲染的cameara
image: torch.Tensor,# ground truth , shape(batch_size,,3)
chunk_idx: int, # 当前射线块的索引。
) -> dict:
"""
Samples and renders a chunk of rays.
Args:
camera_hash: A unique identifier of a pre-cached camera.
If `None`, the cache is not searched and the sampled rays are
calculated from scratch.
camera: A batch of cameras from which the scene is rendered.
image: A batch of corresponding ground truth images of shape
('batch_size', ·, ·, 3).
chunk_idx: The index of the currently rendered ray chunk.
Returns:
out: `dict` containing the outputs of the rendering:
`rgb_coarse`: The result of the coarse rendering pass.
`rgb_fine`: The result of the fine rendering pass.
`rgb_gt`: The corresponding ground-truth RGB values.
return :
out: `dict` 包含渲染的输出:
`rgb_coarse`:粗略渲染过程的结果。
`rgb_fine`:精细渲染通道的结果。
`rgb_gt`:对应的ground-truth RGB值。
"""
# Initialize the outputs of the coarse rendering to None.
coarse_ray_bundle = None##orgin direction depth xy二维坐标
coarse_weights = None
# First evaluate the coarse rendering pass, then the fine one.
for renderer_pass in ("coarse", "fine"):
(rgb, weights), ray_bundle_out = self._renderer[renderer_pass](
cameras=camera,
volumetric_function=self._implicit_function[renderer_pass],
chunksize=self._chunk_size_test,
chunk_idx=chunk_idx,
density_noise_std=(self._density_noise_std if self.training else 0.0),
input_ray_bundle=coarse_ray_bundle,
ray_weights=coarse_weights,
camera_hash=camera_hash,
)
if renderer_pass == "coarse":
rgb_coarse = rgb
# Store the weights and the rays of the first rendering pass
# for the ensuing importance ray-sampling of the fine render.
#存储第一个渲染通道的权重和光线,用于精细渲染的后续重要性光线采样。
coarse_ray_bundle = ray_bundle_out##第一次粗渲染的结果保存用于精细渲染
coarse_weights = weights
if image is not None:
# Sample the ground truth images at the xy locations of the
# rendering ray pixels.
# 在xy位置对ground truth图像进行采样,渲染光线像素。
rgb_gt = sample_images_at_mc_locs(
image[..., :3][None],
ray_bundle_out.xys,
)
else:
rgb_gt = None
elif renderer_pass == "fine":
rgb_fine = rgb
else:
raise ValueError(f"No such rendering pass {renderer_pass}")
out = {"rgb_fine": rgb_fine, "rgb_coarse": rgb_coarse, "rgb_gt": rgb_gt}
if self.visualization:
# Store the coarse rays/weights only for visualization purposes.
# 存储粗射线/权重仅用于可视化目的。
out["coarse_ray_bundle"] = type(coarse_ray_bundle)(
*[v.detach().cpu() for k, v in coarse_ray_bundle._asdict().items()]
)
out["coarse_weights"] = coarse_weights.detach().cpu()
##切断梯度
return out
def forward
def forward(
self,
camera_hash: Optional[str],
camera: CamerasBase,
image: torch.Tensor,
) -> Tuple[dict, dict]:
"""
从输入的“camera”的角度执行辐射场的粗略和精细的渲染传递。
之后,两种渲染方式都与输入的地面真实“图像”相比较。
通过评估峰值信噪比和均方误差.
The rendering result depends on the `self.training` flag:
- In the training mode (`self.training==True`),
该函数renders图像射线的随机子集(MonteCarlo rendering)。
- In evaluation mode (`self.training==False`),
该函数renders整个图像。为了防止内存不足的错误,
当 `self.training==False` 时,对光线进行采样和渲染
批量大小为“chunksize”。
参数:
camera_hash:预缓存相机的唯一标识符。
如果为“None”,则不搜索缓存并且采样光线
从头计算。
camera:渲染场景的一批相机。
image: 一批对应形状为
('batch_size', ·, ·, 3)的ground truth图像
Returns:
out: `dict` 包含渲染的输出:
`rgb_coarse`:粗略渲染过程的结果。
`rgb_fine`:精细渲染通道的结果。
`rgb_gt`:对应的ground-truth RGB值。
The shape of `rgb_coarse`, `rgb_fine`, `rgb_gt` depends on the
`self.training` flag:
If `==True`, all 3 tensors are of shape
`(batch_size, n_rays_per_image, 3)` and contain the result
of the Monte Carlo training rendering pass.
If `==False`, all 3 tensors are of shape
`(batch_size, image_size[0], image_size[1], 3)` and contain
the result of the full image rendering pass.
metrics: `dict` 包含比较细和粗渲染到实际情况的误差度量:
`mse_coarse`:粗略渲染和渲染之间的均方误差
输入`图像`
`mse_fine`:精细渲染和渲染之间的均方误差
输入`图像`
`psnr_coarse`:粗略渲染和粗糙渲染之间的峰值信噪比
输入`图像`
`psnr_fine`:精细渲染和精细渲染之间的峰值信噪比
输入`图像`
"""
if not self.training:
# Full evaluation pass.
n_chunks = self._renderer["coarse"].raysampler.get_n_chunks(#获取chunk数即块数
self._chunk_size_test,
camera.R.shape[0],
)
else:
# 如果在测试的话完整的渲染.
n_chunks = 1
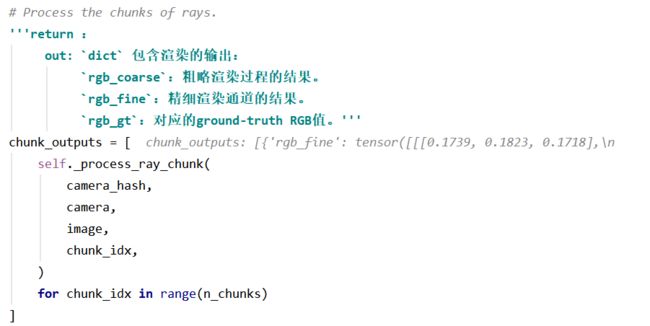
# Process the chunks of rays.
'''return :
out: `dict` 包含渲染的输出:
`rgb_coarse`:粗略渲染过程的结果。
`rgb_fine`:精细渲染通道的结果。
`rgb_gt`:对应的ground-truth RGB值。'''
chunk_outputs = [
self._process_ray_chunk(
camera_hash,
camera,
image,
chunk_idx,
)
for chunk_idx in range(n_chunks)
]
if not self.training:
# For a full render pass concatenate the output chunks,
# and reshape to image size.
# 对于完整的渲染过程,连接输出块,并重塑为图像大小。
out = {
k: torch.cat(
[ch_o[k] for ch_o in chunk_outputs],
dim=1,
).view(-1, *self._image_size, 3)
if chunk_outputs[0][k] is not None
else None
for k in ("rgb_fine", "rgb_coarse", "rgb_gt")
}
else:
out = chunk_outputs[0]
# Calc the error metrics.
metrics = {}
if image is not None:
for render_pass in ("coarse", "fine"):
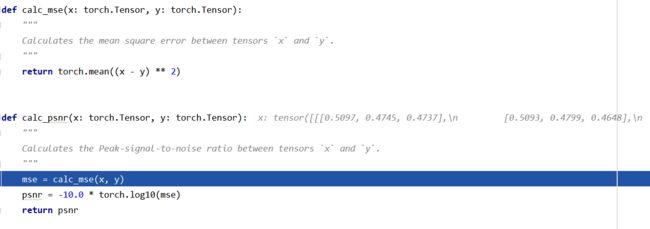
for metric_name, metric_fun in zip(
("mse", "psnr"), (calc_mse, calc_psnr)
):
metrics[f"{metric_name}_{render_pass}"] = metric_fun(
out["rgb_" + render_pass][..., :3],
out["rgb_gt"][..., :3],
)
return out, metrics
implicit_function.py
class MLPWithInputSkips
def init
class MLPWithInputSkips(torch.nn.Module):
"""
实现神经辐射场的多层感知器架构。
因此,`MLPWithInputSkips` 是一个多层感知器,包括
具有 ReLU 激活的线性层序列。
Additionally, for a set of predefined layers `input_skips`, the forward pass
appends a skip tensor `z` to the output of the preceding layer.
此外,对于一组预定义层 `input_skips`,前向传递
在前一层的输出上附加一个跳过张量“z”。
Note that this follows the architecture described in the Supplementary
Material (Fig. 7) of [1].
References:
[1] Ben Mildenhall and Pratul P. Srinivasan and Matthew Tancik
and Jonathan T. Barron and Ravi Ramamoorthi and Ren Ng:
NeRF: Representing Scenes as Neural Radiance Fields for View
Synthesis, ECCV2020
"""
def __init__(
self,
n_layers: int,
input_dim: int,
output_dim: int,
skip_dim: int,
hidden_dim: int,
input_skips: Tuple[int] = (),
):
"""
Args:
n_layers: The number of linear layers of the MLP.
input_dim: The number of channels of the input tensor.
output_dim: The number of channels of the output.
skip_dim: The number of channels of the tensor `z` appended when
evaluating the skip layers.
hidden_dim: The number of hidden units of the MLP.
input_skips: The list of layer indices at which we append the skip
tensor `z`.
"""
super().__init__()
layers = []
for layeri in range(n_layers):
if layeri == 0:
dimin = input_dim
dimout = hidden_dim
elif layeri in input_skips:
dimin = hidden_dim + skip_dim
dimout = hidden_dim
else:
dimin = hidden_dim
dimout = hidden_dim
linear = torch.nn.Linear(dimin, dimout)
_xavier_init(linear)
layers.append(torch.nn.Sequential(linear, torch.nn.ReLU(True)))
self.mlp = torch.nn.ModuleList(layers)
self._input_skips = set(input_skips)
def forward(self, x: torch.Tensor, z: torch.Tensor) -> torch.Tensor:
"""
Args:
x: The input tensor of shape `(..., input_dim)`.
z: The input skip tensor of shape `(..., skip_dim)` which is appended
to layers whose indices are specified by `input_skips`.
Returns:
y: The output tensor of shape `(..., output_dim)`.
"""
y = x
for li, layer in enumerate(self.mlp):
if li in self._input_skips:
y = torch.cat((y, z), dim=-1)
y = layer(y)
return y
class NeuralRadianceField
def init
self.harmonic_embedding_xyz = HarmonicEmbedding(n_harmonic_functions_xyz)
谐波嵌入层将输入的三维坐标转换为更适合于深度神经网络处理的表示。
使用高频函数将输入映射到高维空间,可以更好地拟合包含高频变化的数据
class NeuralRadianceField(torch.nn.Module):
def __init__(
self,
n_harmonic_functions_xyz: int = 6,
n_harmonic_functions_dir: int = 4,
n_hidden_neurons_xyz: int = 256,##x经过8层256大小的mlp生成密度和中间特征
n_hidden_neurons_dir: int = 128,##中间特征和方向进入additionalfullyconnect层获得颜色
n_layers_xyz: int = 8,
append_xyz: Tuple[int] = (5,),
use_multiple_streams: bool = True,
**kwargs,
):
"""
Args:
n_harmonic_functions_xyz: 用于形成三维点位置谐波嵌入的调和函数的数目。
n_harmonic_functions_dir: 用于形成光线方向的谐波嵌入的调和函数的数目。
n_hidden_neurons_xyz: MLP的全连接层中接受3D点位置并输出具有中间特征的占用字段的隐藏单元数。
n_hidden_neurons_dir: MLP全连接层中接受中间特征和射线方向并输出辐射场(每点颜色)的隐藏单元数。
n_layers_xyz: 输出占用字段的MLP的层数。
append_xyz: 占用MLP的跳过层的索引列表。
use_multiple_streams: 是否应在单独的CUDA流上计算密度和颜色。
"""
super().__init__()
# 谐波嵌入层将输入的三维坐标转换为更适合于深度神经网络处理的表示。
# 使用高频函数将输入映射到高维空间,可以更好地拟合包含高频变化的数据
self.harmonic_embedding_xyz = HarmonicEmbedding(n_harmonic_functions_xyz)
self.harmonic_embedding_dir = HarmonicEmbedding(n_harmonic_functions_dir)
embedding_dim_xyz = n_harmonic_functions_xyz * 2 * 3 + 3 #63
embedding_dim_dir = n_harmonic_functions_dir * 2 * 3 + 3 #27
self.mlp_xyz = MLPWithInputSkips(##使用多层感知机
n_layers_xyz,
embedding_dim_xyz,
n_hidden_neurons_xyz,
embedding_dim_xyz,
n_hidden_neurons_xyz,
input_skips=append_xyz,
)
self.intermediate_linear = torch.nn.Linear(
n_hidden_neurons_xyz, n_hidden_neurons_xyz
)
_xavier_init(self.intermediate_linear)
self.density_layer = torch.nn.Linear(n_hidden_neurons_xyz, 1)#生成一个密度
_xavier_init(self.density_layer)
# Zero the bias of the density layer to avoid
# a completely transparent initialization.
# 将密度层的偏差归零以避免
# 一个完全透明的初始化。
self.density_layer.bias.data[:] = 0.0 # fixme: Sometimes this is not enough
self.color_layer = torch.nn.Sequential(
LinearWithRepeat(#输入是经过mlp全连接层后的中间特征和位置编码过后的direction
n_hidden_neurons_xyz + embedding_dim_dir, n_hidden_neurons_dir
),#输出是光线上每个点的特征以及该光线方向编码特征
torch.nn.ReLU(True),
torch.nn.Linear(n_hidden_neurons_dir, 3),
torch.nn.Sigmoid(),
)##获得一个rays_rgb图像
self.use_multiple_streams = use_multiple_streams
其他函数
def _get_densities(
self,
features: torch.Tensor,
depth_values: torch.Tensor,
density_noise_std: float,
) -> torch.Tensor:
"""
This function takes `features` predicted by `self.mlp_xyz`
and converts them to `raw_densities` with `self.density_layer`.
`raw_densities` are later re-weighted using the depth step sizes
and mapped to [0-1] range with 1 - inverse exponential of `raw_densities`.
"""
raw_densities = self.density_layer(features)
deltas = torch.cat(
(
depth_values[..., 1:] - depth_values[..., :-1],
1e10 * torch.ones_like(depth_values[..., :1]),
),
dim=-1,
)[..., None]
if density_noise_std > 0.0:
raw_densities = (
raw_densities + torch.randn_like(raw_densities) * density_noise_std
)
densities = 1 - (-deltas * torch.relu(raw_densities)).exp()
return densities#(batchsize, 1024, 64, 1)
def _get_colors(
self, features: torch.Tensor, rays_directions: torch.Tensor
) -> torch.Tensor:
"""
This function takes per-point `features` predicted by `self.mlp_xyz`
and evaluates the color model in order to attach to each
point a 3D vector of its RGB color.
"""
# Normalize the ray_directions to unit l2 norm.先进行L2规则化
rays_directions_normed = torch.nn.functional.normalize(rays_directions, dim=-1)
# Obtain the harmonic embedding of the normalized ray directions.
rays_embedding = self.harmonic_embedding_dir(rays_directions_normed)#对其进行位置编码
return self.color_layer((self.intermediate_linear(features), rays_embedding))
#把特征和编码过后的direction输入到颜色层,得到(batchsize, 1024, 64, 3)
def _get_densities_and_colors(
self, features: torch.Tensor, ray_bundle: RayBundle, density_noise_std: float
) -> Tuple[torch.Tensor, torch.Tensor]:
"""
The second part of the forward calculation.
Args:
features: the output of the common mlp (the prior part of the
calculation), shape
(minibatch x ... x self.n_hidden_neurons_xyz).
ray_bundle: As for forward().
density_noise_std: As for forward().
Returns:
rays_densities: A tensor of shape `(minibatch, ..., num_points_per_ray, 1)`
denoting the opacity of each ray point.
rays_colors: A tensor of shape `(minibatch, ..., num_points_per_ray, 3)`
denoting the color of each ray point.
"""
if self.use_multiple_streams and features.is_cuda:
current_stream = torch.cuda.current_stream(features.device)
other_stream = torch.cuda.Stream(features.device)
other_stream.wait_stream(current_stream)
with torch.cuda.stream(other_stream):
rays_densities = self._get_densities(
features, ray_bundle.lengths, density_noise_std
)
# rays_densities.shape = [minibatch x ... x 1] in [0-1]
rays_colors = self._get_colors(features, ray_bundle.directions)
# rays_colors.shape = [minibatch x ... x 3] in [0-1]
current_stream.wait_stream(other_stream)
else:
# Same calculation as above, just serial.
rays_densities = self._get_densities(
features, ray_bundle.lengths, density_noise_std
)
rays_colors = self._get_colors(features, ray_bundle.directions)
return rays_densities, rays_colors
#两个输出,一个是rays_densities,shape (minibatch, ..., num_points_per_ray, 1),用于表示每个射线点的不透明度
#一个是rays_colors, shape (minibatch, …, num_points_per_ray, 3) 用于表示每个射线点的颜色
def forward(
self,
ray_bundle: RayBundle,
density_noise_std: float = 0.0,
**kwargs,
) -> Tuple[torch.Tensor, torch.Tensor]:
"""
The forward function accepts the parametrizations of
3D points sampled along projection rays. The forward
pass is responsible for attaching a 3D vector
and a 1D scalar representing the point's
RGB color and opacity respectively.
Args:
ray_bundle: A RayBundle object containing the following variables:
origins: A tensor of shape `(minibatch, ..., 3)` denoting the
origins of the sampling rays in world coords.
directions: A tensor of shape `(minibatch, ..., 3)`
containing the direction vectors of sampling rays in world coords.
lengths: A tensor of shape `(minibatch, ..., num_points_per_ray)`
containing the lengths at which the rays are sampled.
density_noise_std: A floating point value representing the
variance of the random normal noise added to the output of
the opacity function. This can prevent floating artifacts.
Returns:
rays_densities: A tensor of shape `(minibatch, ..., num_points_per_ray, 1)`
denoting the opacity of each ray point.
rays_colors: A tensor of shape `(minibatch, ..., num_points_per_ray, 3)`
denoting the color of each ray point.
"""
# We first convert the ray parametrizations to world
# coordinates with `ray_bundle_to_ray_points`.# 我们首先将光线参数化转换为世界与 `ray_bundle_to_ray_points` 坐标。
rays_points_world = ray_bundle_to_ray_points(ray_bundle)
# rays_points_world.shape = [minibatch x ... x 3]
# For each 3D world coordinate, we obtain its harmonic embedding.
embeds_xyz = self.harmonic_embedding_xyz(rays_points_world)
# embeds_xyz.shape = [minibatch x ... x self.n_harmonic_functions*6 + 3]
# self.mlp maps each harmonic embedding to a latent feature space.
features = self.mlp_xyz(embeds_xyz, embeds_xyz)
# features.shape = [minibatch x ... x self.n_hidden_neurons_xyz]
rays_densities, rays_colors = self._get_densities_and_colors(
features, ray_bundle, density_noise_std
)
return rays_densities, rays_colors
#两个输出,一个是rays_densities,shape (minibatch, ..., num_points_per_ray, 1),用于表示每个射线点的不透明度
#一个是rays_colors, shape (minibatch, …, num_points_per_ray, 3) 用于表示每个射线点的颜色
'''ray_bundle 包含了光束原点、方向、和长度等信息。
原点: shape (minibatch, ..., 3)
方向: shape (minibatch, ..., 3)
长度:shape (minibatch, ..., num_points_per_ray) 光线被采样的长度
return:
rays_densities : A tensor of shape (minibatch, ..., num_points_per_ray, 1) denoting the opacity of each ray point.
rays_colors: A tensor of shape (minibatch, ..., num_points_per_ray, 3) denoting the color of each ray point.'''
raysampler.py
class ProbabilisticRaysampler
def init
class ProbabilisticRaysampler(torch.nn.Module):
"""
实现沿光线的点的重要性采样。
输入是一个带有“ray_weights”张量的“RayBundle”对象,
该张量指定沿每条光线采样一个点的概率。
This raysampler is used for the fine rendering pass of NeRF.
As such, the forward pass accepts the RayBundle output by the
raysampling of the coarse rendering pass. Hence, it does not
take cameras as input.
"""
def __init__(
self,
n_pts_per_ray: int,
stratified: bool,
stratified_test: bool,
add_input_samples: bool = True,
):
"""
Args:
n_pts_per_ray: The number of points to sample along each ray.
stratified: If `True`, the input `ray_weights` are assumed to be
sampled at equidistant intervals.
stratified_test: Same as `stratified` with the difference that this
setting is applied when the module is in the `eval` mode
(`self.training==False`).
add_input_samples: Concatenates and returns the sampled values
together with the input samples.
"""
super().__init__()
self._n_pts_per_ray = n_pts_per_ray
self._stratified = stratified
self._stratified_test = stratified_test
self._add_input_samples = add_input_samples
def forward
def forward(
self,
input_ray_bundle: RayBundle,
ray_weights: torch.Tensor,
**kwargs,
) -> RayBundle:
"""
Args:
input_ray_bundle: An instance of `RayBundle` specifying the
source rays for sampling of the probability distribution.
ray_weights: A tensor of shape
`(..., input_ray_bundle.legths.shape[-1])` with non-negative
elements defining the probability distribution to sample
ray points from.
Returns:
ray_bundle: A new `RayBundle` instance containing the input ray
points together with `n_pts_per_ray` additional sampled
points per ray.
"""
# Calculate the mid-points between the ray depths.
z_vals = input_ray_bundle.lengths
batch_size = z_vals.shape[0]
# Carry out the importance sampling.
with torch.no_grad():
z_vals_mid = 0.5 * (z_vals[..., 1:] + z_vals[..., :-1])
z_samples = sample_pdf(
z_vals_mid.view(-1, z_vals_mid.shape[-1]),
ray_weights.view(-1, ray_weights.shape[-1])[..., 1:-1],
self._n_pts_per_ray,
det=not (
(self._stratified and self.training)
or (self._stratified_test and not self.training)
),
).view(batch_size, z_vals.shape[1], self._n_pts_per_ray)
if self._add_input_samples:
# Add the new samples to the input ones.
z_vals = torch.cat((z_vals, z_samples), dim=-1)
else:
z_vals = z_samples
# Resort by depth.
z_vals, _ = torch.sort(z_vals, dim=-1)
return RayBundle(
origins=input_ray_bundle.origins,
directions=input_ray_bundle.directions,
lengths=z_vals,
xys=input_ray_bundle.xys,
)
class NeRFRaysampler 其他函数

def init
class NeRFRaysampler(torch.nn.Module):
"""
Implements the raysampler of NeRF.
Depending on the `self.training` flag, the raysampler either samples
a chunk of random rays (`self.training==True`), or returns a subset of rays
of the full image grid (`self.training==False`).
The chunking of rays allows for efficient evaluation of the NeRF implicit
surface function without encountering out-of-GPU-memory errors.
Additionally, this raysampler supports pre-caching of the ray bundles
for a set of input cameras (`self.precache_rays`).
Pre-caching the rays before training greatly speeds-up the ensuing
raysampling step of the training NeRF iterations.
实现 NeRF 的光线采样器。
根据 `self.training` 标志,光线采样器要么采样一大块随机光线(`self.training==True`),或返回光线子集完整的图像网格(`self.training==False`)。
光线的分块允许对 NeRF 隐式进行有效评估表面函数,而不会遇到 GPU 内存不足错误。
此外,此光线采样器支持光线束的预缓存,对于一组输入相机(`self.precache_rays`),在训练之前预先缓存光线可以大大加快随后的处理速度
训练 NeRF 迭代的射线采样步骤。
"""
def __init__(
self,
n_pts_per_ray: int,
min_depth: float,
max_depth: float,
n_rays_per_image: int,
image_width: int,
image_height: int,
stratified: bool = False,
stratified_test: bool = False,
):
"""
Args:
n_pts_per_ray: The number of points sampled along each ray.
min_depth: The minimum depth of a ray-point.
max_depth: The maximum depth of a ray-point.
n_rays_per_image: Number of Monte Carlo ray samples when training
(`self.training==True`).
image_width: The horizontal size of the image grid.
image_height: The vertical size of the image grid.
stratified: If `True`, stratifies (=randomly offsets) the depths
of each ray point during training (`self.training==True`).
stratified_test: If `True`, stratifies (=randomly offsets) the depths
of each ray point during evaluation (`self.training==False`).
n_pts_per_ray:沿每条射线采样的点数。
min_depth:射线点的最小深度。
max_depth:射线点的最大深度。
n_rays_per_image:训练时的蒙特卡洛射线样本数
(`self.training==True`)。
image_width:图像网格的水平尺寸。
image_height:图像网格的垂直尺寸。
分层:如果“真”,分层(=随机偏移)深度
训练期间的每个射线点(`self.training==True`)。
stratified_test:如果为“真”,则分层(=随机偏移)深度
评估期间的每个射线点(`self.training==False`)。
"""
super().__init__()
self._stratified = stratified
self._stratified_test = stratified_test
# Initialize the grid ray sampler.初始化网格射线采样器
self._grid_raysampler = NDCMultinomialRaysampler(
image_width=image_width,
image_height=image_height,
n_pts_per_ray=n_pts_per_ray,
min_depth=min_depth,
max_depth=max_depth,
)
# Initialize the Monte Carlo ray sampler.
self._mc_raysampler = MonteCarloRaysampler(
min_x=-1.0,
max_x=1.0,
min_y=-1.0,
max_y=1.0,
n_rays_per_image=n_rays_per_image,
n_pts_per_ray=n_pts_per_ray,
min_depth=min_depth,
max_depth=max_depth,
)
# create empty ray cache 创建新的光线缓存
self._ray_cache = {}
class NeRFRaysampler(torch.nn.Module)
def precache_rays(self, cameras: List[CamerasBase], camera_hashes: List):
def precache_rays
self._renderer[“coarse”].raysampler.precache_rays
def precache_rays(self, cameras: List[CamerasBase], camera_hashes: List):
"""
预缓存从相机“cameras”列表中发出的光线,其中每个相机都用相应的哈希唯一标识来自`camera_hashes`。
缓存的光线被移动到 cpu 并存储在 `self._ray_cache` 中,缓存具有相同哈希的两个相机时引发 `ValueError`。
Args::
cameras:预先缓存了光线的“N”个相机的列表。
camera_hashes:每个的“N”个唯一标识符的列表,来自“cameras”的相机。
"""
print(f"Precaching {len(cameras)} ray bundles ...")
full_chunksize = ( #4096000
self._grid_raysampler._xy_grid.numel()
// 2
* self._grid_raysampler._n_pts_per_ray
)##每个chunk最多预缓存的光线数
if self.get_n_chunks(full_chunksize, 1) != 1:##只能是一个chunk来预缓存光线
raise ValueError("There has to be one chunk for precaching rays!")
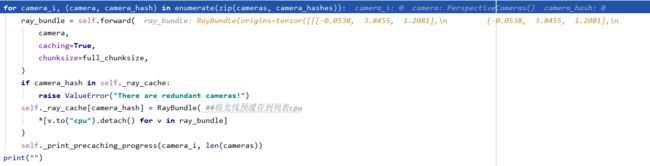
for camera_i, (camera, camera_hash) in enumerate(zip(cameras, camera_hashes)):
ray_bundle = self.forward(
camera,
caching=True,
chunksize=full_chunksize,
)
if camera_hash in self._ray_cache:
raise ValueError("There are redundant cameras!")
self._ray_cache[camera_hash] = RayBundle( ##将光线预缓存到列表cpu
*[v.to("cpu").detach() for v in ray_bundle]
)
self._print_precaching_progress(camera_i, len(cameras))
print("")
debug
self
for camera_i, (camera, camera_hash) in enumerate(zip(cameras, camera_hashes)):


def get_n_chunks
self.get_n_chunks(full_chunksize, 1)
def get_n_chunks(self, chunksize: int, batch_size: int):
"""
返回“chunksize”大小的光线采样器的光线块的总数。
参数:
chunksize:每个块的光线数量。
batch_size:光线采样器的批次大小。
return:
n_chunks:块的总数。
"""
return int(
math.ceil(#向上取整 numel->返回元素个数
(self._grid_raysampler._xy_grid.numel() * 0.5 * batch_size) / chunksize
)
)
def forword
ray_bundle = self.forward(
camera,
caching=True,
chunksize=full_chunksize,
)

def forward(
self,
cameras: CamerasBase,
chunksize: int = None,
chunk_idx: int = 0,
camera_hash: str = None,
caching: bool = False,
**kwargs,
) -> RayBundle:
"""
Args:
cameras: 发出射线的一批“batch_size”照相机。
chunksize: 每块射线的数量。只在下列情况下激活 `self.training==False`.
chunk_idx: 射线块的索引。号码必须在
`[0, self.get_n_chunks(chunksize, batch_size)-1]`.
只在下列情况下激活 `self.training==False`.
camera_hash: 预缓存相机的唯一标识符。 If `None`,
缓存不被搜索,光线是从头开始计算的。
caching: If `True`, 激活缓存模式,该模式返回应该存储到缓存中的“RayBundle”。
Returns:
一个名为“RayBundle”的元组,具有以下字段:
origins: A tensor of shape
`(batch_size, n_rays_per_image, 3)`
在世界坐标中表示射线原点的位置。
directions: A tensor of shape
`(batch_size, n_rays_per_image, 3)`
表示世界坐标中每一条射线的方向。
lengths: A tensor of shape
`(batch_size, n_rays_per_image, n_pts_per_ray)`
包含世界单位中每条射线的z坐标(=depth).
xys: A tensor of shape
`(batch_size, n_rays_per_image, 2)`
包含每个射线的2D图像坐标。
"""
batch_size = cameras.R.shape[0] # pyre-ignore 1
device = cameras.device
if (camera_hash is None) and (not caching) and self.training:
# Sample random rays from scratch.从头开始采集光线
ray_bundle = self._mc_raysampler(cameras)
ray_bundle = self._normalize_raybundle(ray_bundle)
else:
if camera_hash is not None:
# 我们从缓存中取回相机的情况.
if batch_size != 1:
raise NotImplementedError(
"Ray caching works only for batches with a single camera!"
)
full_ray_bundle = self._ray_cache[camera_hash]#从光线缓存中取出光线
else:
# 我们从零开始生成一个完整的射线网格。
full_ray_bundle = self._grid_raysampler(cameras)
full_ray_bundle = self._normalize_raybundle(full_ray_bundle)
n_pixels = full_ray_bundle.directions.shape[:-1].numel() #640000
if self.training:
# During training we randomly subsample rays.对光线进行二次采样
sel_rays = torch.randperm(n_pixels, device=device)[
: self._mc_raysampler._n_rays_per_image
]
else:
# 如果我们进行测试,我们只接受所请求的块.直接取chunk
if chunksize is None:
chunksize = n_pixels * batch_size
start = chunk_idx * chunksize * batch_size #0
end = min(start + chunksize, n_pixels) #640000
sel_rays = torch.arange(
start,
end,
dtype=torch.long,
device=full_ray_bundle.lengths.device,
)
# 把整束射线中的“sel_rays”取出来。
ray_bundle = RayBundle(
*[
v.view(n_pixels, -1)[sel_rays]
.view(batch_size, sel_rays.numel() // batch_size, -1)
.to(device)
for v in full_ray_bundle
]
)
if (
(self._stratified and self.training)
or (self._stratified_test and not self.training)
) and not caching: # 请确保缓存时不要分层!
ray_bundle = self._stratify_ray_bundle(ray_bundle)
return ray_bundle
debug
self:
NeRFRaysampler(
(_grid_raysampler): NDCMultinomialRaysampler()
(_mc_raysampler): MonteCarloRaysampler()
)

full_ray_bundle = self._grid_raysampler(cameras)



def _normalize_raybundle
ray_bundle = self._normalize_raybundle(ray_bundle)
def _normalize_raybundle(self, ray_bundle: RayBundle):
"""
将输入“RayBundle”的光线方向标准化为单位范数。
"""
ray_bundle = ray_bundle._replace(
directions=torch.nn.functional.normalize(ray_bundle.directions, dim=-1)
)
return ray_bundle
def _print_precaching_progress
self._print_precaching_progress(camera_i, len(cameras))
def _print_precaching_progress(self, i, total, bar_len=30):
"""
打印光线缓存的进度条
"""
position = round((i + 1) / total * bar_len)
pbar = "[" + "█" * position + " " * (bar_len - position) + "]"
print(pbar, end="\r")
raymarcher.py
import torch
from pytorch3d.renderer import EmissionAbsorptionRaymarcher
from pytorch3d.renderer.implicit.raymarching import (
_check_density_bounds,
_check_raymarcher_inputs,
_shifted_cumprod,
)
EmissionAbsorptionNeRFRaymarcher
class EmissionAbsorptionNeRFRaymarcher(EmissionAbsorptionRaymarcher):
"""
这本质上是`pytorch3d.renderer.EmissionAbsorptionRaymarcher`,返回渲染权重。
它也跳过返回 alpha-mask 的计算,在 NeRF 的情况下,到处等于 1
权重随后在NeRF管道中用于实现重要性 精细渲染过程的光线采样。
For more details about the EmissionAbsorptionRaymarcher please refer to
the documentation of `pytorch3d.renderer.EmissionAbsorptionRaymarcher`.
"""
def forward(
self,
rays_densities: torch.Tensor,
rays_features: torch.Tensor,
eps: float = 1e-10,
**kwargs,
) -> torch.Tensor:
"""
参数:
rays_densities:用张量表示的每射线密度值
形状为 `(..., n_points_per_ray, 1)`,其值范围为 [0, 1]。
rays_features:用张量表示的每条射线特征值
形状`(...,n_points_per_ray,feature_dim)`。
eps:计算前添加到“rays_densities”的下限,吸收函数(“1-rays_densities”的cumprod沿每条射线)。这可以防止 cumprod 产生精确的 0
这将抑制任何基于梯度的学习。
Return:
features:形状为 `(..., feature_dim)` 的张量,包含每条光线的渲染特征。
weights:形状为 `(..., n_points_per_ray)` 的张量,包含射线特定的发射吸收分布。每个射线分布 `(..., :)` 是一个有效概率分布,即它包含整合的非负值
到 1,这样 `weights.sum(dim=-1)==1).all()` 产生 `True`。
"""
_check_raymarcher_inputs(
rays_densities,
rays_features,
None,
z_can_be_none=True,
features_can_be_none=False,
density_1d=True,
)
_check_density_bounds(rays_densities)
##检查输入的ray_density and ray_color是否有误
rays_densities = rays_densities[..., 0]
absorption = _shifted_cumprod(
(1.0 + eps) - rays_densities, shift=self.surface_thickness
)
weights = rays_densities * absorption
#利用该式子计算weights(bs, 1024, 64) 当吸收系数大的时候,weights变小, 表明对当前颜色贡献小
features = (weights[..., None] * rays_features).sum(dim=-2)#rgb_putput
return features, weights
class Stats 其他函数:
def new_epoch
def new_epoch(self) -> None:
"""
Initializes a new epoch.
"""
if self.verbose:
print("stats: new epoch %d" % (self.epoch + 1))
self.epoch += 1 # increase epoch counter
self.reset() # zero the stats
update
# Update stats with the current metrics.
stats.update(
{"loss": float(loss), **metrics},
stat_set="train",
)
def update(self, preds: dict, stat_set: str = "train") -> None:
"""
Update the internal logs with metrics of a training step.
每个指标都存储为AverageMeter的实例。
Args:
preds: 要添加到日志中的值的Dict
stat_set: 待更新的统计数据集 (e.g. "train", "val").
"""
if self.epoch == -1: # uninitialized
warnings.warn(
"self.epoch==-1 means uninitialized stats structure"
" -> new_epoch() called"
)
self.new_epoch()
if stat_set not in self.stats:
self.stats[stat_set] = {}
self.it[stat_set] = -1
self.it[stat_set] += 1
epoch = self.epoch
it = self.it[stat_set]
for stat in self.log_vars:
if stat not in self.stats[stat_set]:
self.stats[stat_set][stat] = AverageMeter()
if stat == "sec/it": # compute speed
elapsed = time.time() - self._epoch_start
time_per_it = float(elapsed) / float(it + 1)
val = time_per_it
else:
if stat in preds:
val = self._gather_value(preds[stat])
else:
val = None
if val is not None:
self.stats[stat_set][stat].update(val, epoch=epoch, n=1)
def print(self, max_it: Optional[int] = None, stat_set: str = "train") -> None:
"""
Print the current values of all stored stats.
Args:
max_it: Maximum iteration number to be displayed.
If None, the maximum iteration number is not displayed.
stat_set: The set of statistics to be printed.
"""
epoch = self.epoch
stats = self.stats
str_out = ""
it = self.it[stat_set]
stat_str = ""
stats_print = sorted(stats[stat_set].keys())
for stat in stats_print:
if stats[stat_set][stat].count == 0:
continue
stat_str += " {0:.12}: {1:1.3f} |".format(stat, stats[stat_set][stat].avg)
head_str = f"[{stat_set}] | epoch {epoch} | it {it}"
if max_it:
head_str += f"/ {max_it}"
str_out = f"{head_str} | {stat_str}"
print(str_out)
def _gather_value(self, val):
if isinstance(val, float):
pass
else:
val = val.data.cpu().numpy()
val = float(val.sum())
return val
def plot_stats(
self,
viz: Visdom = None,
visdom_env: Optional[str] = None,
plot_file: Optional[str] = None,
) -> None:
"""
Plot the line charts of the history of the stats.
Args:
viz: The Visdom object holding the connection to a Visdom server.
visdom_env: The visdom environment for storing the graphs.
plot_file: The path to a file with training plots.
"""
stat_sets = list(self.stats.keys())
if viz is None:
withvisdom = False
elif not viz.check_connection():
warnings.warn("Cannot connect to the visdom server! Skipping visdom plots.")
withvisdom = False
else:
withvisdom = True
lines = []
for stat in self.log_vars:
vals = []
stat_sets_now = []
for stat_set in stat_sets:
val = self.stats[stat_set][stat].get_epoch_averages()
if val is None:
continue
else:
val = np.array(val).reshape(-1)
stat_sets_now.append(stat_set)
vals.append(val)
if len(vals) == 0:
continue
vals = np.stack(vals, axis=1)
x = np.arange(vals.shape[0])
lines.append((stat_sets_now, stat, x, vals))
if withvisdom:
for tmodes, stat, x, vals in lines:
title = "%s" % stat
opts = {"title": title, "legend": list(tmodes)}
for i, (tmode, val) in enumerate(zip(tmodes, vals.T)):
update = "append" if i > 0 else None
valid = np.where(np.isfinite(val))
if len(valid) == 0:
continue
viz.line(
Y=val[valid],
X=x[valid],
env=visdom_env,
opts=opts,
win=f"stat_plot_{title}",
name=tmode,
update=update,
)
if plot_file is None:
plot_file = self.plot_file
if plot_file is not None:
print("Exporting stats to %s" % plot_file)
ncol = 3
nrow = int(np.ceil(float(len(lines)) / ncol))
matplotlib.rcParams.update({"font.size": 5})
color = cycle(plt.cm.tab10(np.linspace(0, 1, 10)))
fig = plt.figure(1)
plt.clf()
for idx, (tmodes, stat, x, vals) in enumerate(lines):
c = next(color)
plt.subplot(nrow, ncol, idx + 1)
for vali, vals_ in enumerate(vals.T):
c_ = c * (1.0 - float(vali) * 0.3)
valid = np.where(np.isfinite(vals_))
if len(valid) == 0:
continue
plt.plot(x[valid], vals_[valid], c=c_, linewidth=1)
plt.ylabel(stat)
plt.xlabel("epoch")
plt.gca().yaxis.label.set_color(c[0:3] * 0.75)
plt.legend(tmodes)
gcolor = np.array(mcolors.to_rgba("lightgray"))
plt.grid(
b=True, which="major", color=gcolor, linestyle="-", linewidth=0.4
)
plt.grid(
b=True, which="minor", color=gcolor, linestyle="--", linewidth=0.2
)
plt.minorticks_on()
plt.tight_layout()
plt.show()
fig.savefig(plot_file)
pytorch3D
class RayBundle(NamedTuple)
class RayBundle(NamedTuple):
"""
RayBundle通过存储射线“origins”,沿投影射线参数化点,
`directions` vectors and `lengths` at which the ray-points are sampled.
此外,射线像素的XY位置(‘xys’)也被存储。
请注意,“directions”不必标准化;
它们在各自的一维坐标系中定义单位向量;
有关转换公式,请参见:func:“Ray_bundle_to_ray_points”的文档。
"""
origins: torch.Tensor
directions: torch.Tensor
lengths: torch.Tensor
xys: torch.Tensor
class NDCMultinomialRaysampler
class NDCMultinomialRaysampler(MultinomialRaysampler):
"""
在一批矩形图像网格中有规律地分布的沿着射线的固定数目的点。
沿每条射线的点在预定义的最小深度和最大深度之间有均匀的z坐标.
`NDCMultinomialRaysampler‘遵循`Mesh’和‘PointClouds’渲染的屏幕惯例。
即像素坐标在[-1,1]x[-u,u]或[-u,u]x[-1,1]中,其中u>1是图像的纵横比。
有关参数的说明,请参阅给MultinomialRaySampler的文档。
"""
def __init__(
self,
*,
image_width: int,
image_height: int,
n_pts_per_ray: int,
min_depth: float,
max_depth: float,
n_rays_per_image: Optional[int] = None,
unit_directions: bool = False,
stratified_sampling: bool = False,
) -> None:
if image_width >= image_height:
range_x = image_width / image_height
range_y = 1.0
else:
range_x = 1.0
range_y = image_height / image_width
half_pix_width = range_x / image_width
half_pix_height = range_y / image_height
super().__init__(
min_x=range_x - half_pix_width,
max_x=-range_x + half_pix_width,
min_y=range_y - half_pix_height,
max_y=-range_y + half_pix_height,
image_width=image_width,
image_height=image_height,
n_pts_per_ray=n_pts_per_ray,
min_depth=min_depth,
max_depth=max_depth,
n_rays_per_image=n_rays_per_image,
unit_directions=unit_directions,
stratified_sampling=stratified_sampling,
)
class MultinomialRaysampler
class MultinomialRaysampler(torch.nn.Module):
"""
沿着规则分布的射线对固定数量的点进行采样
在一批矩形图像网格中.
每条射线上的点 在预定义的 最小和最大深度 之间.
raysampler首先生成以下形式的3D坐标网格:
```
/ min_x, min_y, max_depth -------------- / max_x, min_y, max_depth
/ /|
/ / | ^
/ min_depth min_depth / | |
min_x ----------------------------- max_x | | image
min_y min_y | | height
| | | |
| | | v
| | |
| | / max_x, max_y, ^
| | / max_depth /
min_x max_y / / n_pts_per_ray
max_y ----------------------------- max_x/ min_depth v
< --- image_width --- >
```
In order to generate ray points, `MultinomialRaysampler` takes each 3D point of
the grid (with coordinates `[x, y, depth]`) and unprojects it
with `cameras.unproject_points([x, y, depth])`, where `cameras` are an
additional input to the `forward` function.
Note that this is a generic implementation that can support any image grid
coordinate convention. For a raysampler which follows the PyTorch3D
coordinate conventions please refer to `NDCMultinomialRaysampler`.
As such, `NDCMultinomialRaysampler` is a special case of `MultinomialRaysampler`.
"""
def __init__(
self,
*,
min_x: float,
max_x: float,
min_y: float,
max_y: float,
image_width: int,
image_height: int,
n_pts_per_ray: int,
min_depth: float,
max_depth: float,
n_rays_per_image: Optional[int] = None,
unit_directions: bool = False,
stratified_sampling: bool = False,
) -> None:
"""
Args:
min_x: The leftmost x-coordinate of each ray's source pixel's center.
max_x: The rightmost x-coordinate of each ray's source pixel's center.
min_y: The topmost y-coordinate of each ray's source pixel's center.
max_y: The bottommost y-coordinate of each ray's source pixel's center.
image_width: The horizontal size of the image grid.
image_height: The vertical size of the image grid.
n_pts_per_ray: The number of points sampled along each ray.
min_depth: The minimum depth of a ray-point.
max_depth: The maximum depth of a ray-point.
n_rays_per_image: If given, this amount of rays are sampled from the grid.
unit_directions: whether to normalize direction vectors in ray bundle.
stratified_sampling: if set, performs stratified random sampling
along the ray; otherwise takes ray points at deterministic offsets.
"""
super().__init__()
self._n_pts_per_ray = n_pts_per_ray
self._min_depth = min_depth
self._max_depth = max_depth
self._n_rays_per_image = n_rays_per_image
self._unit_directions = unit_directions
self._stratified_sampling = stratified_sampling
# get the initial grid of image xy coords
_xy_grid = torch.stack(
tuple(
reversed(
meshgrid_ij(
torch.linspace(min_y, max_y, image_height, dtype=torch.float32),
torch.linspace(min_x, max_x, image_width, dtype=torch.float32),
)
)
),
dim=-1,
)
self.register_buffer("_xy_grid", _xy_grid, persistent=False)
def forward(
self,
cameras: CamerasBase,
*,
mask: Optional[torch.Tensor] = None,
min_depth: Optional[float] = None,
max_depth: Optional[float] = None,
n_rays_per_image: Optional[int] = None,
n_pts_per_ray: Optional[int] = None,
stratified_sampling: bool = False,
**kwargs,
) -> RayBundle:
"""
Args:
cameras: A batch of `batch_size` cameras from which the rays are emitted.
mask: if given, the rays are sampled from the mask. Should be of size
(batch_size, image_height, image_width).
min_depth: The minimum depth of a ray-point.
max_depth: The maximum depth of a ray-point.
n_rays_per_image: If given, this amount of rays are sampled from the grid.
n_pts_per_ray: The number of points sampled along each ray.
stratified_sampling: if set, performs stratified sampling in n_pts_per_ray
bins for each ray; otherwise takes n_pts_per_ray deterministic points
on each ray with uniform offsets.
Returns:
A named tuple RayBundle with the following fields:
origins: A tensor of shape
`(batch_size, s1, s2, 3)`
denoting the locations of ray origins in the world coordinates.
directions: A tensor of shape
`(batch_size, s1, s2, 3)`
denoting the directions of each ray in the world coordinates.
lengths: A tensor of shape
`(batch_size, s1, s2, n_pts_per_ray)`
containing the z-coordinate (=depth) of each ray in world units.
xys: A tensor of shape
`(batch_size, s1, s2, 2)`
containing the 2D image coordinates of each ray or,
if mask is given, `(batch_size, n, 1, 2)`
Here `s1, s2` refer to spatial dimensions. Unless the mask is
given, they equal `(image_height, image_width)`, otherwise `(n, 1)`,
where `n` is `n_rays_per_image` if provided, otherwise the minimum
cardinality of the mask in the batch.
"""
batch_size = cameras.R.shape[0]
device = cameras.device
# expand the (H, W, 2) grid batch_size-times to (B, H, W, 2)
xy_grid = self._xy_grid.to(device).expand(batch_size, -1, -1, -1)
num_rays = n_rays_per_image or self._n_rays_per_image
if mask is not None and num_rays is None:
# if num rays not given, sample according to the smallest mask
num_rays = num_rays or mask.sum(dim=(1, 2)).min().int().item()
if num_rays is not None:
if mask is not None:
assert mask.shape == xy_grid.shape[:3]
weights = mask.reshape(batch_size, -1)
else:
# it is probably more efficient to use torch.randperm
# for uniform weights but it is unlikely given that randperm
# is not batched and does not support partial permutation
_, width, height, _ = xy_grid.shape
weights = xy_grid.new_ones(batch_size, width * height)
rays_idx = _safe_multinomial(weights, num_rays)[..., None].expand(-1, -1, 2)
xy_grid = torch.gather(xy_grid.reshape(batch_size, -1, 2), 1, rays_idx)[
:, :, None
]
min_depth = min_depth if min_depth is not None else self._min_depth
max_depth = max_depth if max_depth is not None else self._max_depth
n_pts_per_ray = (
n_pts_per_ray if n_pts_per_ray is not None else self._n_pts_per_ray
)
stratified_sampling = (
stratified_sampling
if stratified_sampling is not None
else self._stratified_sampling
)
return _xy_to_ray_bundle(
cameras,
xy_grid,
min_depth,
max_depth,
n_pts_per_ray,
self._unit_directions,
stratified_sampling,
)
class MonteCarloRaysampler
class MonteCarloRaysampler(torch.nn.Module):
"""
随机均匀采样指定xy边界内固定数量的像素。
对于每个像素,
沿其射线在均匀间隔的z坐标处采样固定数量的点,
使得z坐标在预定义的最小和最大深度之间。
出于实用目的,这类似于不带掩码的多项式采样,
但是在绕过替换检查的实值位置采样可能会更快。
"""
def __init__(
self,
min_x: float,
max_x: float,
min_y: float,
max_y: float,
n_rays_per_image: int,
n_pts_per_ray: int,
min_depth: float,
max_depth: float,
*,
unit_directions: bool = False,
stratified_sampling: bool = False,
) -> None:
"""
Args:
min_x: The smallest x-coordinate of each ray's source pixel.
max_x: The largest x-coordinate of each ray's source pixel.
min_y: The smallest y-coordinate of each ray's source pixel.
max_y: The largest y-coordinate of each ray's source pixel.
n_rays_per_image: The number of rays randomly sampled in each camera.
n_pts_per_ray: The number of points sampled along each ray.
min_depth: The minimum depth of each ray-point.
max_depth: The maximum depth of each ray-point.
unit_directions: whether to normalize direction vectors in ray bundle.
stratified_sampling: if set, performs stratified sampling in n_pts_per_ray
bins for each ray; otherwise takes n_pts_per_ray deterministic points
on each ray with uniform offsets.
"""
super().__init__()
self._min_x = min_x
self._max_x = max_x
self._min_y = min_y
self._max_y = max_y
self._n_rays_per_image = n_rays_per_image
self._n_pts_per_ray = n_pts_per_ray
self._min_depth = min_depth
self._max_depth = max_depth
self._unit_directions = unit_directions
self._stratified_sampling = stratified_sampling
def forward(
self, cameras: CamerasBase, *, stratified_sampling: bool = False, **kwargs
) -> RayBundle:
"""
Args:
cameras: A batch of `batch_size` cameras from which the rays are emitted.
stratified_sampling: if set, performs stratified sampling in n_pts_per_ray
bins for each ray; otherwise takes n_pts_per_ray deterministic points
on each ray with uniform offsets.
Returns:
A named tuple RayBundle with the following fields:
origins: A tensor of shape
`(batch_size, n_rays_per_image, 3)`
denoting the locations of ray origins in the world coordinates.
directions: A tensor of shape
`(batch_size, n_rays_per_image, 3)`
denoting the directions of each ray in the world coordinates.
lengths: A tensor of shape
`(batch_size, n_rays_per_image, n_pts_per_ray)`
containing the z-coordinate (=depth) of each ray in world units.
xys: A tensor of shape
`(batch_size, n_rays_per_image, 2)`
containing the 2D image coordinates of each ray.
"""
batch_size = cameras.R.shape[0]
device = cameras.device
# get the initial grid of image xy coords
# of shape (batch_size, n_rays_per_image, 2)
rays_xy = torch.cat(
[
torch.rand(
size=(batch_size, self._n_rays_per_image, 1),
dtype=torch.float32,
device=device,
)
* (high - low)
+ low
for low, high in (
(self._min_x, self._max_x),
(self._min_y, self._max_y),
)
],
dim=2,
)
stratified_sampling = (
stratified_sampling
if stratified_sampling is not None
else self._stratified_sampling
)
return _xy_to_ray_bundle(
cameras,
rays_xy,
self._min_depth,
self._max_depth,
self._n_pts_per_ray,
self._unit_directions,
stratified_sampling,
)
renderer
implicit renderer class 应该用射线取样raysampling 函数和射线行军raymarching函数初始化。
During the forward pass:
-
The raysampler:
- 从输入相机中采集光线
- 将光线转换为世界坐标
-
The volumetric_function
(它是前传的一个可调用的参数。)
估算 ray_densities and ray_features at the sampled ray-points. -
The raymarcher
获取射线密度和射线特征,并使用raymarching 算法渲染每条射线。
class ImplicitRenderer
class ImplicitRenderer(torch.nn.Module):
"""
Example:
具有单位直径的0中心rgb球的一个简单的体积函数定义如下:
```
def volumetric_function(
ray_bundle: RayBundle,
**kwargs,
) -> Tuple[torch.Tensor, torch.Tensor]:
# 首先,将射线原点、方向和长度转换为世界坐标系中的三维射线点位置。
rays_points_world = ray_bundle_to_ray_points(ray_bundle)
# set the densities as an inverse sigmoid of 距离球体质心的射线点距离
rays_densities = torch.sigmoid(
-100.0 * rays_points_world.norm(dim=-1, keepdim=True)
)
# 将光线特征设置为rgb颜色,与球面上光线点投影的三维位置成比例。
rays_features = torch.nn.functional.normalize(
rays_points_world, dim=-1
) * 0.5 + 0.5
return rays_densities, rays_features
```
"""
def __init__(self, raysampler: Callable, raymarcher: Callable) -> None:
"""
Args:
raysampler: A `Callable` that takes as input scene cameras
(an instance of `CamerasBase`) and returns a `RayBundle` that
describes the rays emitted from the cameras.
raymarcher: A `Callable` that receives the response of the
`volumetric_function` (an input to `self.forward`) evaluated
along the sampled rays, and renders the rays with a
ray-marching algorithm.
"""
super().__init__()
if not callable(raysampler):
raise ValueError('"raysampler" has to be a "Callable" object.')
if not callable(raymarcher):
raise ValueError('"raymarcher" has to be a "Callable" object.')
self.raysampler = raysampler
self.raymarcher = raymarcher
def forward(
self, cameras: CamerasBase, volumetric_function: Callable, **kwargs
) -> Tuple[torch.Tensor, RayBundle]:
"""
Render a batch of images using a volumetric function
represented as a callable (e.g. a Pytorch module).
Args:
cameras: A batch of cameras that render the scene. A `self.raysampler`
takes the cameras as input and samples rays that pass through the
domain of the volumetric function.
volumetric_function: A `Callable` that accepts the parametrizations
of the rendering rays and returns the densities and features
at the respective 3D of the rendering rays. Please refer to
the main class documentation for details.
Returns:
images: A tensor of shape `(minibatch, ..., feature_dim + opacity_dim)`
containing the result of the rendering.
ray_bundle: A `RayBundle` containing the parametrizations of the
sampled rendering rays.
"""
if not callable(volumetric_function):
raise ValueError('"volumetric_function" has to be a "Callable" object.')
# first call the ray sampler that returns the RayBundle parametrizing
# the rendering rays.
ray_bundle = self.raysampler(
cameras=cameras, volumetric_function=volumetric_function, **kwargs
)
# ray_bundle.origins - minibatch x ... x 3
# ray_bundle.directions - minibatch x ... x 3
# ray_bundle.lengths - minibatch x ... x n_pts_per_ray
# ray_bundle.xys - minibatch x ... x 2
# given sampled rays, call the volumetric function that
# evaluates the densities and features at the locations of the
# ray points
rays_densities, rays_features = volumetric_function(
ray_bundle=ray_bundle, cameras=cameras, **kwargs
)
# ray_densities - minibatch x ... x n_pts_per_ray x density_dim
# ray_features - minibatch x ... x n_pts_per_ray x feature_dim
# finally, march along the sampled rays to obtain the renders
images = self.raymarcher(
rays_densities=rays_densities,
rays_features=rays_features,
ray_bundle=ray_bundle,
**kwargs
)
# images - minibatch x ... x (feature_dim + opacity_dim)
return images, ray_bundle
volumetric_function 步骤
1、首先,将射线原点、方向和长度转换为世界坐标系中的三维射线点位置。
2、set the densities as an inverse sigmoid of 距离球体质心的射线点距离
3、将光线特征设置为rgb颜色,与球面上光线点投影的三维位置成比例。
class HarmonicEmbedding
定义在 class NeuralRadianceField
self.harmonic_embedding_xyz = HarmonicEmbedding(n_harmonic_functions_xyz)
class HarmonicEmbedding(torch.nn.Module):
def __init__(
self,
n_harmonic_functions: int = 6,
omega_0: float = 1.0,
logspace: bool = True,
append_input: bool = True,
) -> None:
"""
Given an input tensor `x` of shape [minibatch, ... , dim],
the harmonic embedding layer 转换每个特征
(i.e. vector along the last dimension) in `x`
into a series of harmonic features `embedding`,
where for each i in range(dim) the following are present
in embedding[...]:
```
[
sin(f_1*x[..., i]),
sin(f_2*x[..., i]),
...
sin(f_N * x[..., i]),
cos(f_1*x[..., i]),
cos(f_2*x[..., i]),
...
cos(f_N * x[..., i]),
x[..., i], # only present if append_input is True.
]
```
where N 对应于 `n_harmonic_functions-1`, and f_i is a scalar
denoting the i-th frequency of the harmonic embedding.
If `logspace==True`, the frequencies `[f_1, ..., f_N]` are
powers of 2:
`f_1, ..., f_N = 2**torch.arange(n_harmonic_functions)`
If `logspace==False`, frequencies are linearly spaced between
`1.0` and `2**(n_harmonic_functions-1)`:
`f_1, ..., f_N = torch.linspace(
1.0, 2**(n_harmonic_functions-1), n_harmonic_functions
)`
Note that `x` is also premultiplied预乘的 by the base frequency `omega_0`
before evaluating the harmonic functions.
Args:
n_harmonic_functions: int, number of harmonic
features
omega_0: float, base frequency
logspace: bool, Whether to space the frequencies in
logspace or linear space
append_input: bool, whether to concat the original
input to the harmonic embedding. If true the
output is of the form (x, embed.sin(), embed.cos()
"""
super().__init__()
if logspace:
frequencies = 2.0 ** torch.arange(
n_harmonic_functions,
dtype=torch.float32,
)
else:
frequencies = torch.linspace(
1.0,
2.0 ** (n_harmonic_functions - 1),
n_harmonic_functions,
dtype=torch.float32,
)
self.register_buffer("_frequencies", frequencies * omega_0, persistent=False)
self.append_input = append_input
def forward
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""
Args:
x: tensor of shape [..., dim]
Returns:
embedding: a harmonic embedding of `x`
of shape [..., (n_harmonic_functions * 2 + int(append_input)) * dim]
"""
embed = (x[..., None] * self._frequencies).view(*x.shape[:-1], -1)
embed = torch.cat(
(embed.sin(), embed.cos(), x)
if self.append_input
else (embed.sin(), embed.cos()),
dim=-1,
)
return embed