3D目标检测论文方法汇总 【2022部分持续更新中~
Automanous-3D-detection-methods
版权注释
该项目地址为:https://github.com/LittleYuanzi/awesome-Automanous-3D-detection-methods
2017~2020汇总部分由CSDN博主Little_sky_jty博主倾力攥写,2021部分我将对其进行维护更新为我个人所用,无任何商业目的,如有侵权,告知删除
前言
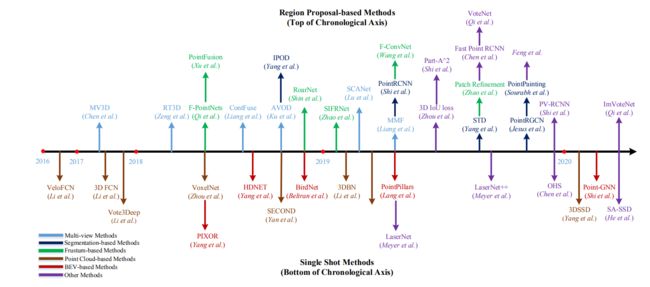
该项目主要在对近期(17年)开始的自动驾驶场景的目标检测方法做一个汇总,持续更新,也欢迎大家参与进来。为了方便表示,该项目仅仅针对自动驾驶场景,分类方法按照输入进行划分,特别地,我们也对论文实验对应的论文做出一定的标注。
keywords
inputs
按照传感器的输入: monocular: 单目 stereo: 双目 lidar: 点云 RGB-D: 深度图
如果是多种传感器融合: image+lidar: 图像+点云
对应实验数据集
用于标注该文章实验对应的数据集: kitti: KITTI nuse: NuScence waymo: Waymo ATG4D: ATG4D [lyft]: lyft [ScanNet]: ScanNet [SUN RGB-D]: SUN RGB-D [SceneNN]: SceneNN
代码
标注代码实现框架: Tensorflow: TensorFlow PyTorch: PyTorch
2017
- [CVPR] PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. [tensorflow][pytorch] [
lidar] ⭐️ - [CVPR] Multi-View 3D Object Detection Network for Autonomous Driving. [tensorflow] [
image+lidar] [kitti] ⭐️ - [ICRA] Vote3Deep: Fast object detection in 3D point clouds using efficient convolutional neural networks. [code_matlab] [
lidar] [kitti]⭐️ - [IROS] 3D fully convolutional network for vehicle detection in point cloud. [tensorflow] [
lidar] [kitti] ⭐️
2018
- [CVPR] PIXOR: Real-time 3D Object Detection from Point Clouds. [pytorch] [
lidar] [kitti][ATG4D] - [CVPR] VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection. [tensorflow] [
lidar] [kitti] ⭐️ - [CVPR] PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation. [code] [
image+lidar] [kitti] - [CVPR] Frustum PointNets for 3D Object Detection from RGB-D Data. [tensorflow] [
image+lidar] [kitti] ⭐️ - [ECCV] Deep Continuous Fusion for Multi-Sensor 3D Object Detection. [
image+lidar] [kitti] [ATG4D] - [ECCVW] YOLO3D: End-to-end real-time 3D Oriented Object Bounding Box Detection from LiDAR Point Cloud. [
monocular] [kitti] - [ICRA] End-to-end Learning of Multi-sensor 3D Tracking by Detection. [
image+lidar] [kitti] - [ICRA] Robust Real-Time 3D Person Detection for Indoor and Outdoor Applications. [
lidar] [kitti] - [ICRA] A General Pipeline for 3D Detection of Vehicles.[
lidar] [kitti] - [IROS] Joint 3D Proposal Generation and Object Detection from View Aggregation. [
lidar] [kitti]⭐️ - [IROS] Edge and Corner Detection for Unorganized 3D Point Clouds with Application to Robotic Welding. [
lidar] [kitti] - [SENSORS] SECOND: Sparsely Embedded Convolutional Detection. [pytorch][
lidar] [kitti] - [arXiv] IPOD: Intensive Point-based Object Detector for Point Cloud. [
image+lidar] [kitti] - [arXiv] Complex-YOLO: Real-time 3D Object Detection on Point Clouds. [pytorch] [
lidar] [kitti]
2019
- [CVPR] Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving. [code] [
stereo][kitti] - [CVPR] Stereo R-CNN based 3D Object Detection for Autonomous Driving. [code] [
stereo][kitti] - [CVPR] PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud. [pytorch] [
lidar] [kitti] - [CVPR] PointPillars: Fast Encoders for Object Detection from Point Clouds. [pytorch] [
lidar] [kitti] - [CVPR] LaserNet: An Efficient Probabilistic 3D Object Detector for Autonomous Driving.[
lidar] [kitti][ATG4D] - [CVPRW] Attentional PointNet for 3D-Object Detection in Point Clouds. [pytorch] [
lidar] [kitti] - [ICCV] Fast Point R-CNN. [
lidar] [kitti] - [ICCV] STD: Sparse-to-Dense 3D Object Detector for Point Cloud.[pytorch] [
lidar] [kitti] - [ICCV] M3D-RPN: Monocular 3D Region Proposal Network for Object Detection.[pytorch] [
monocular] [kitti] - [ICCVW] Range Adaptation for 3D Object Detection in LiDAR. [
lidar] [kitti] - [ICCVW] Multi-View Reprojection Architecture for Orientation Estimation. [
monocular] [kitti] - [NeurIPS] Point-Voxel CNN for Efficient 3D Deep Learning. [
lidar] [kitti] - [ICMLW] LiDAR Sensor modeling and Data augmentation with GANs for Autonomous driving. [
lidar] - [ICRA] Focal Loss in 3D Object Detection. [code] [
lidar] [kitti] - [ICRA] SEG-VoxelNet for 3D Vehicle Detection from RGB and LiDAR Data. [
lidar] [kitti] - [ICRA] MVX-Net: Multimodal VoxelNet for 3D Object Detection. [
lidar] [kitti] - [AAAI] MonoGRNet: A Geometric Reasoning Network for 3D Object Localization. [
monocular] [kitti] - [IROS] EPN: Edge-Aware PointNet for Object Recognition from Multi-View 2.5D Point Clouds. [tensorflow] [
lidar] [kitti] - [IROS] Frustum ConvNet: Sliding Frustums to Aggregate Local Point-Wise Features for Amodal 3D Object Detection. [pytorch] [
lidar+image] [kitti] - [IROS] Improving 3D object detection for pedestrians with virtual multi-view synthesis orientation estimation. [
lidar] [kitti] - [3DV] IoU Loss for 2D/3D Object Detection. [
lidar] [kitti] - [arXiv] Monocular 3D Object Detection with Pseudo-LiDAR Point Cloud. [
monocular][kitti] - [arXiv] FVNet: 3D Front-View Proposal Generation for Real-Time Object Detection from Point Clouds. [code] [
lidar] [kitti] - [CVPRW] Complexer-YOLO: Real-Time 3D Object Detection and Tracking on Semantic Point Clouds. [pytorch] [
monocular][kitti] - [CVPR] Monocular 3D Object Detection Leveraging Accurate Proposals and Shape Reconstruction. [pytorch] [
monocular][kitti] - [CVPR] GS3D: An Efficient 3D Object Detection Framework for Autonomous Driving. [
monocular][kitti] - [CVPR] ROI-10D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape. [
monocular][kitti] - [CVPR] Triangulation Learning Network: from Monocular to Stereo 3D Object Detection. [pytorch] [
stereo][kitti] - [CoRR] 3D Backbone Network for 3D Object Detection. [code] [
lidar] [kitti] - [arXiv] nuScenes: A multimodal dataset for autonomous driving. [link] [
dataset] - [arXiv] Deformable Filter Convolution for Point Cloud Reasoning.[
lidar] [kitti][ATG4D] - [arXiv] PointRGCN: Graph Convolution Networks for 3D Vehicles Detection Refinement.[
lidar] [kitti][ATG4D]
2020
- [TPAMI] Part-A^2 Net: 3D Part-Aware and Aggregation Neural Network for Object Detection from Point Cloud. [pytorch][
lidar] [kitti] - [AAAI] TANet: Robust 3D Object Detection from Point Clouds with Triple Attention. [code] [
lidar] [kitti] - [AAAI] PI-RCNN: An Efficient Multi-sensor 3D Object Detector with Point-based Attentive Cont-conv Fusion Module. [
lidar+image] [kitti] - [AAAI] ZoomNet: Part-Aware Adaptive Zooming Neural Network for 3D Object Detection. [code] [
stereo] [kitti] - [AAAI] Monocular 3D Object Detection with Decoupled Structured Polygon Estimation and Height-Guided Depth Estimation. [
monocular] [kitti] - [CVPR] PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection. [pytorch] [
lidar] [kitti] [waymo] ⭐️ ⭐️ - [CVPR] Structure Aware Single-stage 3D Object Detection from Point Cloud. [pytorch] [
lidar] [kitti] ⭐️ - [CVPR]3DSSD: Point-based 3D Single Stage Object Detector. [TensorFlow] [
lidar] [kitti][nusc] ⭐️ - [CVPR]Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud. [TensorFlow] [
lidar] [kitti] ⭐️ - [CVPR]Associate-3Ddet: Perceptual-to-Conceptual Association for 3D Point Cloud Object Detection. [
lidar] [kitti] - [CVPR]PnPNet: End-to-End Perception and Prediction with Tracking in the Loop. [
lidar] - [CVPR] Train in Germany, Test in The USA: Making 3D Object Detectors Generalize.[code] [
lidar] - [CVPR] PointPainting: Sequential Fusion for 3D Object Detection. [
lidar+image] [kitti] [nusc] - [CVPR] DSGN: Deep Stereo Geometry Network for 3D Object Detection. [
monocular] [kitti] - [CVPR] Disp R-CNN: Stereo 3D Object Detection via Shape Prior Guided Instance Disparity Estimation.[code] [
stereo] [kitti] - [CVPR] Learning Depth-Guided Convolutions for Monocular 3D Object Detection.[code] [
monocular] [kitti] - [CVPR] MonoPair: Monocular 3D Object Detection Using Pairwise Spatial Relationships. [
monocular] [kitti] - [CVPR] LiDAR-based Online 3D Video Object Detection with Graph-based Message Passing and Spatiotemporal Transformer Attention. [
lidar_video] [nusc] - [CVPR] Physically Realizable Adversarial Examples for LiDAR Object Detection. [
lidar] - [CVPR]HVNet: Hybrid Voxel Network for LiDAR Based 3D Object Detection. [
lidar] [kitti] - [CVPR]Learning to Evaluate Perception Models Using Planner-Centric Metrics. [
lidar] - [CVPR]What You See is What You Get: Exploiting Visibility for 3D Object Detection. [
lidar] [nusc] - [CVPR]MotionNet: Joint Perception and Motion Prediction for Autonomous Driving Based on Bird’s Eye View Maps. [
lidar] - [ECCVW] Deformable PV-RCNN: Improving 3D Object Detection with Learned Deformations.[code][
lidar] [kitti] - [ECCV] object as hotspots.[
lidar] [kitti] - [ECCV] EPNet: Enhancing Point Features with Image Semantics for 3D Object Detection.[
lidar+image] [kitti] - [ECCV] 3D-CVF: Generating Joint Camera and LiDAR Features Using Cross-View Spatial Feature Fusion for 3D Object Detection.[
lidar+image] [kitti] - [ECCV] Kinematic 3D Object Detection in Monocular Video.[code][
monocular_video] [kitti] - [ECCV] Rethinking Pseudo-LiDAR Representation.[code][
monocular] [kitti] - [ECCV] An LSTM Approach to Temporal 3D Object Detection in LiDAR Point Clouds.[
lidar] [kitti] - [ECCV] Pillar-based Object Detection for Autonomous Driving.[
lidar] [waymo] - [ECCV] Active Perception using Light Curtains for Autonomous Driving.[code][
lidar] - [ECCV] Searching Efficient 3D Architectures with Sparse Point-Voxel Convolution.[
lidar] - [ECCV] Improving 3D Object Detection through Progressive Population Based Augmentation.[
lidar] [kitti] - [IROS] MVLidarNet: Real-Time Multi-Class Scene Understanding for Autonomous Driving Using Multiple Views.[
lidar] [nusc] - [ACMMM] Weakly Supervised 3D Object Detection from Point Clouds.[
lidar] - [BMVC] RV-FuseNet: Range View based Fusion of Time-Series LiDAR Data for Joint 3D Object Detection and Motion Forecasting [
lidar][nusc] - [Sensors] 3D-GIoU: 3D Generalized Intersection over Union for Object Detection in Point Cloud [
lidar][kitti] - [arxiv] 3D IoU-Net: IoU Guided 3D Object Detector for Point Clouds [
lidar][kitti] - [arxiv] Center-based 3D Object Detection and Tracking [code][
lidar][nusc] - [arxiv] Boundary-Aware Dense Feature Indicator for Single-Stage 3D Object Detection from Point Clouds [
lidar][nusc] - [arxiv] InfoFocus: 3D Object Detection for Autonomous Driving with Dynamic Information Modeling [
lidar][nusc] - [arxiv] Quantifying Data Augmentation for LiDAR based 3D Object Detection [
lidar][kitti] - [arxiv] Range Conditioned Dilated Convolutions for Scale Invariant 3D Object Detection [
lidar][kitti][nusc] - [arxiv] Real-time 3D object proposal generation and classification under limited processing resources [
lidar][kitti] - [arxiv] Safety-Aware Hardening of 3D Object Detection Neural Network Systems [
lidar][kitti] - [arxiv] Stereo RGB and Deeper LIDAR Based Network for 3D Object Detection[
stereo][kitti] - [arxiv] SSN: Shape Signature Networks for Multi-class Object Detection from Point Clouds [code][
lidar][kitti] - [arxiv] SVGA-Net: Sparse Voxel-Graph Attention Network for 3D Object Detection from Point Clouds
[lidar][kitti] - [arxiv] GhostBuster: Looking Into Shadows to Detect Ghost Objects in Autonomous Vehicle 3D Sensing [
lidar][kitti] - [arxiv] Cross-Modality 3D Object Detection [
lidar][kitti] - [arxiv] Towards Autonomous Driving: a Multi-Modal 360∘ Perception Proposal[
lidar][kitti] - [arxiv] Accurate 3D Object Detection using Energy-Based Models. [code][
lidar][kitti]
2021
- [AAAI] CIA-SSD: Confident IoU-Aware Single-Stage Object Detector From Point Cloud. [pytorch] [
lidar] [kitti] - [AAAI] Voxel R-CNN: Towards High Performance Voxel-based 3D Object Detection. [
lidar] [kitti] [waymo] - [AAAI] RTS3D: Real-time Stereo 3D Detection from 4D Feature-Consistency Embedding Space for Autonomous Driving. [pytorch] [
monocular] [kitti] - [AAAI] PC-RGNN: Point Cloud Completion and Graph Neural Network for 3D Object Detection. [
lidar] [kitti] - [CVPR] SE-SSD: Self-Ensembling Single-Stage Object Detector From Point Cloud. [code] [
lidar] [kitti] ⭐️ ⭐️ - [CVPR] Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds. [pytorch] [
lidar] [ScanNet] [SUN RGB-D] - [CVPR] Objects are Different: Flexible Monocular 3D Object Detection. [code] [
monocular] [kitti] - [CVPR] HVPR: Hybrid Voxel-Point Representation for Single-stage 3D Object Detection. [
lidar] [kitti] - [CVPR] GrooMeD-NMS: Grouped Mathematically Differentiable NMS for Monocular 3D Object Detection. [pytorch] [
monocular] [kitti] - [CVPR] Delving into Localization Errors for Monocular 3D Object Detection. [code] [
monocular] [kitti] - [CVPR] Depth-conditioned Dynamic Message Propagation for Monocular 3D Object Detection. [code] [
monocular] [kitti] - [CVPR] LiDAR R-CNN: An Efficient and Universal 3D Object Detector. [pytorch] [
lidar] [kitti] [waymo] ⭐️ ⭐️ - [CVPR] M3DSSD: Monocular 3D Single Stage Object Detector. [
monocular] [kitti] - [CVPR] MonoRUn: Monocular 3D Object Detection by Self-Supervised Reconstruction and Uncertainty Propagation.[
monocular] [kitti] - [CVPR] ST3D: Self-training for Unsupervised Domain Adaptation on 3D Object Detection. [pytorch] [
lidar] [kitti] - [CVPR] Center-based 3D Object Detection and Tracking. [pytorch] [
lidar] [kitti] [waymo] ⭐️ - [CVPR] 3DIoUMatch: Leveraging IoU Prediction for Semi-Supervised 3D Object Detection. [pytorch] [
lidar] [kitti] [ScanNet] [SUN RGB-D] - [CVPR] Categorical Depth Distribution Network for Monocular 3D Object Detection. [
monocular] [kitti] [waymo] - [ARXIV] PV-RCNN++: Point-Voxel Feature Set Abstraction With Local Vector Representation for 3D Object Detection. [pytorch] [
lidar] [kitti] [waymo] ⭐️ ⭐️ - [CVPR] Monocular 3D Object Detection: An Extrinsic Parameter Free Approach [
monocular] [kitti] - [CVPR] SRDAN: Scale-aware and Range-aware Domain Adaptation Network for Cross-dataset 3D Object Detection [
lidar] [kitti] - [CVPR] PVGNet: A Bottom-Up One-Stage 3D Object Detector with Integrated Multi-Level Features [
lidar] [kitti] - [CVPR] PointAugmenting: Cross-Modal Augmentation for 3D Object Detection [
image+lidar] [nusc][waymo] - [CVPR] To the Point: Efficient 3D Object Detection in the Range Image with Graph Convolution Kernels [
RGB-D] [waymo] - [CVPR] RangeIoUDet: Range Image based Real-Time 3D Object Detector Optimized by Intersection over Union [
RGB-D] [kitti] - [CVPR] RSN: Range Sparse Net for Efficient, Accurate LiDAR 3D Object Detection [
lidar] [kitti] - [CVPR] 3D Object Detection with Pointformer [pytorch][
lidar] [ScanNet] [SUN RGB-D] - [CVPR] Offboard 3D Object Detection from Point Cloud Sequences [
lidar] [waymo] - [CVPR] 3D-MAN: 3D Multi-frame Attention Network for Object Detection [
video] [waymo] - [ICCV] An End-to-End Transformer Model for 3D Object Detection [
lidar] [ScanNet] [SUN RGB-D] ⭐️ ⭐️ - [ICCV] Group-Free 3D Object Detection via Transformers [
lidar] [ScanNet] [SUN RGB-D] ⭐️ ⭐️ - [ICCV] Improving 3D Object Detection with Channel-wise Transformer [
lidar] [kitti] - [ICCV] AutoShape: Real-Time Shape-Aware Monocular 3D Object Detection [
monocular] [kitti] - [ICCV] 4D-Net for Learned Multi-Modal Alignment[
lidar+RGB] [waymo] - [ICCV] Voxel Transformer for 3D Object Detection [
lidar] [kitti] - [ICCV] Pyramid R-CNN: Towards Better Performance and Adaptability for 3D Object Detection[
lidar] [kitti] - [ICCV] RangeDet:In Defense of Range View for LiDAR-based 3D Object Detection[
lidar] [waymo] - [ICCV] Geometry-based Distance Decomposition for Monocular 3D Object Detection [
monocular] [kitti] - [ICCV] It’s All Around You: Range-Guided Cylindrical Network for 3D Object Detection [
lidar] [nuse] - [ICCV] SPG: Unsupervised Domain Adaptation for 3D Object Detection via Semantic Point Generation [
lidar] [waymo] [kitti] - [ICCV] Graph Convolutional Networks for 3D Object Detection on Radar Data [
radar] [Private Dataset] - [ICCV] Are we Missing Confidence in Pseudo-LiDAR Methods for Monocular 3D Object Detection? [
monocular] [kitti] - [IEEE] Transformer3D-Det: Improving 3D Object Detection by Vote Refinement [
lidar] [ScanNet] [SUN RGB-D] - [IEEE] Ground-Aware Monocular 3D Object Detection for Autonomous Driving [
monocular] [kitti] - [WACV] CenterFusion: Center-based Radar and Camera Fusion for 3D Object Detection[
radar+RGB] [nuse]
2022
- [AAAI] SASA: Semantics-Augmented Set Abstraction for Point-based 3D Object Detection. [pytorch] [
lidar] [kitti][nuScenes] - [AAAI] SVGA-Net: Sparse Voxel-Graph Attention Network for 3D Object Detection from Point Clouds.[
lidar] [kitti] - [AAAI] Joint 3D Object Detection and Tracking Using Spatio-Temporal Representation of Camera Image and LiDAR Point Clouds. [
image+lidar] [kitti][nuScenes] - [AAAI] Distribution Aware VoteNet for 3D Object Detection. [
lidar] [ScanNet][SUN RGB-D] - [AAAI] Learning Auxiliary Monocular Contexts Helps Monocular 3D Object Detection. [
monocular] [kitti] - [AAAI] JPV-Net: Joint Point-Voxel Representations for Accurate 3D Object Detection. [
lidar] [kitti] - [AAAI] Correlation Field for Boosting 3D Object Detection in Structured Scenes. [
lidar] [ScanNet][SUN RGB-D] - [AAAI] Behind the Curtain: Learning Occluded Shapes for 3D Object Detection. [pytorch] [
lidar] [kitti][waymo] - [AAAI] Static-Dynamic Co-Teaching for Class-Incremental 3D Object Detection. [pytorch] [
lidar] [ScanNet][SUN RGB-D] - [AAAI] SCIR-Net: Structured Color Image Representation Based 3D Object Detection Network from Point Clouds. [
lidar] [kitti][waymo] - [CVPR] Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds. [pytorch] [
lidar] [kitti] - [CVPR] Bridged Transformer for Vision and Point Cloud 3D Object Detection. [pytorch] [
image+lidar] [ScanNet] [SUN RGB-D] - [CVPR] TransFusion: Robust LiDAR-Camera Fusion for 3D Object Detection With Transformers. [pytorch][
image+lidar] [kitti] - [CVPR] Boosting 3D Object Detection by Simulating Multimodality on Point Clouds. [
lidar] [nuScenes] - [CVPR] Point Density-Aware Voxels for LiDAR 3D Object Detection. [
lidar] [kitti] - [CVPR] DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection. [tensorflow] [
image+lidar] [waymo] - [CVPR] Diversity Matters: Fully Exploiting Depth Clues for Reliable Monocular 3D Object Detection. [
monocular] [kitti] - [CVPR] CAT-Det: Contrastively Augmented Transformer for Multi-Modal 3D Object Detection. [
image+lidar] [kitti] - [CVPR] Pseudo-Stereo for Monocular 3D Object Detection in Autonomous Driving. [pytorch] [
monocular] [kitti] - [CVPR] SS3D: Sparsely-Supervised 3D Object Detection From Point Cloud. [
lidar] [kitti] - [CVPR] LIFT: Learning 4D LiDAR Image Fusion Transformer for 3D Object Detection. [
image+lidar] [nuScenes] [waymo] - [CVPR] Focal Sparse Convolutional Networks for 3D Object Detection. [pytorch] [
lidar] [kitti] [nuScenes] [waymo] - [CVPR] RBGNet: Ray-Based Grouping for 3D Object Detection. [pytorch] [
lidar] [ScanNet] [SUN RGB-D] - [CVPR] MonoJSG: Joint Semantic and Geometric Cost Volume for Monocular 3D Object Detection. [pytorch] [
monocular] [kitti] - [CVPR] Time3D: End-to-End Joint Monocular 3D Object Detection and Tracking for Autonomous Driving. [
monocular] [nuScenes] - [CVPR] Dimension Embeddings for Monocular 3D Object Detection. [
monocular] [kitti] - [CVPR] Homography Loss for Monocular 3D Object Detection. [
monocular] [kitti] - [CVPR] 3D-VField: Adversarial Augmentation of Point Clouds for Domain Generalization in 3D Object Detection. [pytorch] [
lidar] [kitti] [waymo] [SUN RGB-D] - [CVPR] Exploring Geometric Consistency for Monocular 3D Object Detection. [
monocular] [kitti] [nuScenes] - [CVPR] Canonical Voting: Towards Robust Oriented Bounding Box Detection in 3D Scenes. [pytorch] [
lidar] [ScanNet] [SUN RGB-D] [SceneNN] - [CVPR] DisARM: Displacement Aware Relation Module for 3D Detection. [pytorch] [
lidar] [ScanNet] [SUN RGB-D] - [CVPR] Voxel Field Fusion for 3D Object Detection. [pytorch] [
lidar] [kitti] - [CVPR] Rotationally Equivariant 3D Object Detection. [pytorch] [
lidar] [ScanNet][SUN RGB-D][kitti] - [CVPR] Voxel Set Transformer: A Set-to-Set Approach to 3D Object Detection From Point Clouds. [pytorch] [
lidar] [kitti] [waymo] - [CVPR] BoxeR: Box-Attention for 2D and 3D Transformers. [pytorch] [
lidar] [waymo] - [CVPR] Embracing Single Stride 3D Object Detector with Sparse Transformer. [pytorch] [
lidar] [waymo] - [CVPR] Canonical Voting: Towards Robust Oriented Bounding Box Detection in 3D Scenes. [pytorch] [
lidar] [ScanNet] [SceneNN] [SUN RGB-D] - [CVPR] MonoDTR: Monocular 3D Object Detection with Depth-Aware Transformer. [pytorch] [
monocular] [kitti] - [CVPR] HyperDet3D: Learning a Scene-conditioned 3D Object Detector. [
lidar] [ScanNet] [SUN RGB-D] - [CVPR] OccAM's Laser: Occlusion-based Attribution Maps for 3D Object Detectors on LiDAR Data. [pytorch] [
lidar] [kitti] - [ECCV] PersDet: Monocular 3D Detection in Perspective Bird's-Eye-View. [
monocular] [nuScenes] - [ECCV] Densely Constrained Depth Estimator for Monocular 3D Object Detection. [pytorch] [
monocular] [kitti] - [ECCV] Graph R-CNN: Towards Accurate 3D Object Detection with Semantic-Decorated Local Graph. [pytorch] [
lidar] [kitti] [waymo] - [ECCV] Lidar Point Cloud Guided Monocular 3D Object Detection. [pytorch] [
image+lidar] [kitti] - [ECCV] PETR: Position Embedding Transformation for Multi-View 3D Object Detection. [pytorch] [
lidar] [multiview images] [nuScenes] - [ECCV] V2X-ViT: Vehicle-to-Everything Cooperative Perception with Vision Transformer. [pytorch] [
lidar] [V2XSet] - [ECCV] LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection. [pytorch] [
lidar] [kitti] [waymo] [nuScenes] - [ECCV] DID-M3D: Decoupling Instance Depth for Monocular 3D Object Detection. [pytorch] [
monocular] [kitti] - [ECCV] AutoAlignV2: Deformable Feature Aggregation for Dynamic Multi-Modal 3D Object Detection. [pytorch] [
image+lidar] [nuScenes] - [ECCV] DEVIANT: Depth EquiVarIAnt NeTwork for Monocular 3D Object Detection. [pytorch] [
monocular] [kitti] [waymo] - [ECCV] Label-Guided Auxiliary Training Improves 3D Object Detector. [pytorch] [
lidar] [ScanNet] [SUN RGB-D] - [ECCV] Salient Object Detection for Point Clouds. [pytorch] [
lidar] [PCSOD] - [ECCV] Monocular 3D Object Detection with Depth from Motion. [pytorch] [
monocular] [kitti] - [ECCV] Rethinking IoU-based Optimization for Single-stage 3D Object Detection. [pytorch] [
lidar] [kitti][waymo] - [ECCV] ProposalContrast: Unsupervised Pre-training for LiDAR-based 3D Object Detection. [pytorch] [
lidar] [kitti][kitti][waymo][ONCE] -
Suvery
- [TPAMI] Deep Learning for 3D Point Clouds: A Survey[
lidar] - [ARXIV] 3D Point Cloud Processing and Learning for Autonomous Driving[
lidar] - [ELSEVIER] Point-cloud based 3D object detection and classification methods for self-driving applications: A survey and taxonomy[
lidar]
项目
- [lidar_only] second.pytorch [
kitti][nusc] - [lidar_only] Det3D [
kitti][nusc][lyft][waymo] - [lidar_only] OpenPCDet[
kitti][nusc][waymo] - [lidar_image] mmdetection3d[
kitti][nusc][lyft][waymo]