基于matlab编程二维空间内目标作匀速直线运动和匀速圆周运动的特点源码
T=2;
alpha=0.8; % 加权衰减因子
window=1/(1-alpha); % 检测机动的有效窗口长度
dt=100; % dt=dt_x=dt_y=100
Th=25; % 机动检测门限
Ta=9.49; % 退出机动的检测门限
N=800/T; % 采样次数
M=50; % 模拟次数
% 真实轨迹数据
t=2:2:400;
xo0=2000+0*t;
yo0=10000-15*t;
t=402:2:600;
xo1=2000+0.075*((t-400).^2)/2;
yo1=10000-15*400-(15*(t-400)-0.075*((t-400).^2)/2);
t=602:2:610 ;
xo2=xo1(100)+15*(t-600);
yo2=yo1(100)+0*t;
t=612:2:660;
xo3=xo2(5)+(15*(t-610)-0.3*((t-610).^2)/2);
yo3=yo2(5)-0.3*((t-610).^2)/2;
t=662:2:800;
xo4=xo3(25)+0*t;
yo4=yo3(25)-15*(t-660);
x=[xo0,xo1,xo2,xo3,xo4];
y=[yo0,yo1,yo2,yo3,yo4];
e_x1=zeros(1,N);
e_x2=zeros(1,N);
e_y1=zeros(1,N);
e_y2=zeros(1,N);
px=zeros(1,N);
qy=zeros(1,N);
u=zeros(1,N);
u_a=zeros(1,N);
for j=1:M
no1=100*randn(1,N); % 随机白噪
no2=100*randn(1,N);
for i=1:N;
zx(i)=x(i)+no1(i); % 观测数据
zy(i)=y(i)+no2(i);
z(:,i)=[zx(i);zy(i)];
end
%
X_estimate(2,:)=[zx(2),(zx(2)-zx(1))/T,zy(2),(zy(2)-zy(1))/T];
X_est=X_estimate(2,:);
P_estimate=[dt^2,dt^2/T,0,0;dt^2/T,(dt^2)*2/(T^2),0,0;0,0,dt^2,dt^2/T;0,0,dt^2/T,(dt^2)*2/(T^2)];
x1(1)=zx(1); y1(1)=zy(1); x1(2)=X_estimate(2,1); y1(2)=X_estimate(2,3);
u(1)=0; u(2)=0;
u1=u(2);
pp=0;% 0表示非机动,1表示机动
qq=0;
rr=1;
k=3;
while k<=N
if k<=20
z1=z(:,k);
[X_pre,X_est,P_estimate,u1]=kalmanstatic(X_est,P_estimate,z1,k,u1);
X_estimate(k,:)=X_est;
X_predict(k,:)=X_pre;
P(k,:)=[P_estimate(1,1),P_estimate(1,2),P_estimate(2,2),P_estimate(3,3),P_estimate(3,4),P_estimate(4,4)];
x1(k)=X_estimate(k,1);
y1(k)=X_estimate(k,3);
u(k)=u1;
k=k+1;
else
if pp==0 % 进入非机动模型
if rr==window+1 % 由机动进入非机动模型,为防止回朔,至少递推window+1次
u1=0;
else
end
while rr>0
z1=z(:,k);
[X_pre,X_est,P_estimate,u1]=kalmanstatic(X_est,P_estimate,z1,k,u1);
X_estimate(k,:)=X_est;
X_predict(k,:)=X_pre;
P(k,:)=[P_estimate(1,1),P_estimate(1,2),P_estimate(2,2),P_estimate(3,3),P_estimate(3,4),P_estimate(4,4)];
x1(k)=X_estimate(k,1);
y1(k)=X_estimate(k,3);
u(k)=u1;
rr=rr-1;
end
rr=1;
if u(k)>=Th
pp=1;qq=1; % “pp=1,qq=1”表示由非机动进入机动模型
else
end
k=k+1;
else % 机动模型
if qq==1 %由非机动进入机动模型,需要进行修正
k=k-window-1;
Xm_est=[X_estimate(k-1,:),0,0];
Xm_pre=[X_predict(k,:),0,0];
Pm_estimate=zeros(6,6);
P=P(k-1,:);
m=0;
else %在机动模型中进行递推
Xm_est=Xm_estimate(k-1,:);
end
z1=z(:,k);
[Xm_est,Pm_estimate,ua1,qq,m]=kalmandynamic(Xm_pre,Xm_est,Pm_estimate,z1,k,P,qq,m);
Xm_estimate(k,:)=Xm_est;
x1(k)=Xm_estimate(k,1);
y1(k)=Xm_estimate(k,3);
ua(k)=ua1;
if ua1
P_estimate=Pm_estimate(1:4,1:4);
pp=0;
rr=window+1;
else
end
k=k+1;
end
end
end
for j=1:N
px(1,j)=x1(1,j)+px(1,j); % 迭加每次估计的数据
qy(1,j)=y1(1,j)+qy(1,j);
e_x1(j)=(x1(j)-x(j))+e_x1(j);
e_y1(j)=(y1(j)-y(j))+e_y1(j);
e_x2(j)=((x1(j)-x(j))^2)+e_x2(j);
e_y2(j)=((y1(j)-y(j))^2)+e_y2(j);
end
end
for k=1:N
px(1,k)=px(1,k)/M;
qy(1,k)=qy(1,k)/M;
e_x(k)=e_x1(k)/M;
ex(k)=sqrt(e_x2(k)/M-e_x(k)^2);
e_y(k)=e_y1(k)/M;
ey(k)=sqrt(e_y2(k)/M-e_y(k)^2);
end
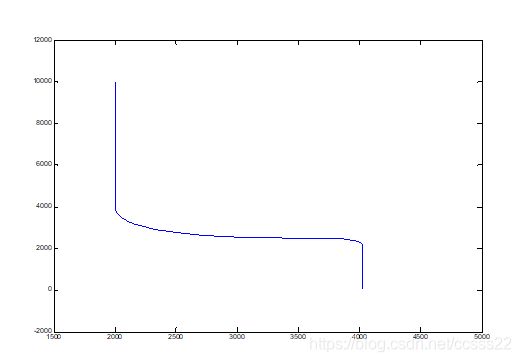
figure(1);
plot(x,y);axis([1500 5000 -2000 12000]);
figure(2);
plot(x,y,'b-',zx,zy,'k:',px,qy,'r');
legend('真实轨迹','观测轨迹','50次滤波轨迹');
figure(3);
plot(x,y,'k',x1,y1,'r');
legend('真实轨迹','一次滤波轨迹');
figure(4);
subplot(2,2,1),plot(e_x); title('X坐标 滤波误差均值曲线');
subplot(2,2,2),plot(e_y); title('Y坐标 滤波误差均值曲线');
subplot(2,2,3),plot(ex); title('X坐标 滤波误差标准差曲线');
subplot(2,2,4),plot(ey); title('Y坐标 滤波误差标准差曲线');
%%%%函数1静态模型
function[X_pre,X_est,P_estimate,u1]=kalmanstatic(X_est,P_estimate,z1,k,u1)
T=2;
alpha=0.8; % 加权衰减因子
Phi=[1,T,0,0;0,1,0,0;0,0,1,T;0,0,0,1];
H=[1,0,0,0;0,0,1,0];
I=[1,0,0,0;0,1,0,0;0,0,1,0;0,0,0,1];
R=[10000,0;0,10000]; % 观测噪声方差阵
X_estimate(k-1,:)=X_est;
u(k-1)=u1;
X_predict(k,:)=(Phi*X_estimate(k-1,:)')';
P_predict=Phi*P_estimate*(Phi)';
K=P_predict*(H)'*inv(H*P_predict*(H)'+R);
X_estimate(k,:)=(X_predict(k,:)'+K*(z1-H*X_predict(k,:)'))';
P_estimate=(I-K*H)*P_predict;
X_est=X_estimate(k,:);
X_pre=X_predict(k,:);
v(:,k)=z1-H*(X_predict(k,:))'; % 新信息
S=H*P_predict*H'+R; % 新信息的方差阵
delta(k)=v(:,k)'*inv(S)*v(:,k);
u(k)=alpha*u(k-1)+delta(k);
u1=u(k);
%%函数2 动态模型
function [Xm_est,Pm_estimate,ua1,qq,m]=kalmandynamic(Xm_pre,Xm_est,Pm_estimate,z1,k,P,qq,m);
T=2;
I=diag([1,1,1,1,1,1]);
Phi=[1,T,0,0,(T^2)/2,0;0,1,0,0,T,0;0,0,1,T,0,(T^2)/2;0,0,0,1,0,T;0,0,0,0,1,0;0,0,0,0,0,1];
H=[1,0,0,0,0,0;0,0,1,0,0,0];
G=[(T^2)/2,0;T,0;0,(T^2)/2;0,T;1,0;0,1];
R=[10000,0;0,10000]; % 观测噪声方差阵
alpha=0.8; % 加权衰减因子
window=1/(1-alpha); % 检测机动的有效窗口长度
Xm_estimate(k-1,:)=Xm_est;
if qq==1 %由非机动进入机动模型,需进行修正, 初始化
Xm_predict(k,:)=Xm_pre;
Xm_estimate(k,5)=[z1(1)-Xm_predict(k,1)]*2/(T^2);
Xm_estimate(k,6)=[z1(2)-Xm_predict(k,3)]*2/(T^2);
Xm_estimate(k,1)=z1(1);
Xm_estimate(k,3)=z1(2);
Xm_estimate(k,2)=Xm_estimate(k-1,2)+Xm_estimate(k,5)*T;
Xm_estimate(k,4)=Xm_estimate(k-1,4)+Xm_estimate(k,6)*T;
% 修正协方差阵
Pm_estimate(1,1)=R(1,1);
Pm_estimate(3,3)=R(2,2);
Pm_estimate(1,2)=R(1,1)*2/T;
Pm_estimate(2,1)=Pm_estimate(1,2);
Pm_estimate(3,4)=R(2,2)*2/T;
Pm_estimate(4,3)=Pm_estimate(3,4);
Pm_estimate(1,5)=R(1,1)*2/(T^2);
Pm_estimate(5,1)=Pm_estimate(1,5);
Pm_estimate(3,6)=R(2,2)*2/(T^2);
Pm_estimate(6,3)=Pm_estimate(3,6);
Pm_estimate(5,5)=[R(1,1)+P(1)+P(2)*2*T+P(3)*T*T]*4/(T^4);
Pm_estimate(6,6)=[R(2,2)+P(4)+P(5)*2*T+P(6)*T*T]*4/(T^4);
Pm_estimate(2,2)=R(1,1)*4/(T^2)+P(1)*4/(T^2)+P(3)+P(2)*4/T;
Pm_estimate(4,4)=R(2,2)*4/(T^2)+P(4)*4/(T^2)+P(6)+P(5)*4/T;
Pm_estimate(2,5)=R(1,1)*4/(T^3)+P(1)*4/(T^3)+P(3)*2/T+P(2)*6/(T^2);
Pm_estimate(5,2)=Pm_estimate(2,5);
Pm_estimate(4,6)=R(2,2)*4/(T^3)+P(4)*4/(T^3)+P(6)*2/T+P(5)*6/(T^2);
Pm_estimate(6,4)=Pm_estimate(4,6);
Xm_est=Xm_estimate(k,:);
qq=0;%修正后,标志qq复位(不再初始化),ua1设为10,使不进入非机动模型
ua1=10;
m=0;
else
% 滤波方程
Xm_predict(k,:)=(Phi*Xm_estimate(k-1,:)')';
Q=[(Xm_estimate(k-1,5)/20)^2,0;0,(Xm_estimate(k-1,6)/20)^2];
Pm_predict=Phi*Pm_estimate*(Phi)'+G*Q*G';
K=Pm_predict*(H)'*inv(H*Pm_predict*(H)'+R);
Xm_estimate(k,:)=(Xm_predict(k,:)'+K*(z1-H*Xm_predict(k,:)'))';
Pm_estimate=(I-K*H)*Pm_predict;
Xm_est=Xm_estimate(k,:);
m=m+1;
delta(k)=[Xm_estimate(k,5),Xm_estimate(k,6)]*[Pm_estimate(5,5),0;0,Pm_estimate(6,6)]*[Xm_estimate(k,5);Xm_estimate(k,6)];
if m>=window
ua(k)=delta(k)+delta(k-1)+delta(k-2)+delta(k-3)+delta(k-4);
ua1=ua(k);
else
ua1=10;
end
end
假定有一二座标雷达对一平面上运动的目标进行观测,目标在0-400秒沿着y轴作恒速直线运动,运动速度为-15米/秒,目标的起始点为(2000米,10000米),在t= 400-600秒向轴x方向做的慢转弯,加速度为0.075米/秒,完成慢转弯后加速度将降为零,从t=610秒开始做90度的快转弯,加速度为0.3米/秒,在660秒结束转弯,加速度降至零。雷达扫描周期T=2秒,X和Y独立地进行观测,观测噪声的标准差均为100米。描述如下:
其中,程序算法中各参数为:
加权衰减因子, 机动检测门限; 退出机动的检测门限;
在跟踪的开始,首先采用非机动模型,从第20次采样开始,激活机动检测器。
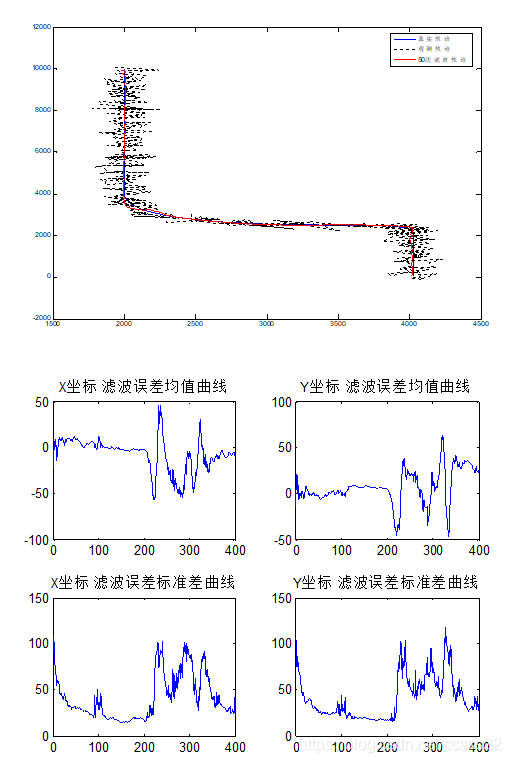
通过上图,可以看到:VD算法有4次机动,分别对应目标的2次加速运动,和2次匀速运动,符合目标真实轨迹变化。只是在模型出现机动的时候,会出现大的误差。在模型的调整过程中,可以明显发现:机动检测门限,退出机动的检测门限,加权衰减因子对算法的有效滤波有很大的影响,当目标快转弯时,会出现大的误差,这时候可以通过改变机动检测门限来减小。