改进YOLOv7系列:首发结合CotNet Transformer结构,指导动态注意力矩阵的学习,增强视觉表示能力。
- 统一使用 YOLOv7 代码框架,结合不同模块来构建不同的YOLO目标检测模型。
- 本项目包含大量的改进方式,降低改进难度,改进点包含
【Backbone特征主干】、【Neck特征融合】、【Head检测头】、【注意力机制】、【IoU损失函数】、【NMS】、【Loss计算方式】、【自注意力机制】、【数据增强部分】、【标签分配策略】、【激活函数】等各个部分。
对于这块有疑问的,可以在评论区提出,或者私信CSDN。
本篇是《CotNet Transformer结构》的修改 演示
论文:Contextual Transformer Networks for Visual Recognition
论文地址:https://arxiv.org/abs/2107.12292
文章目录
-
- CoTNet理论部分
- YOLOv7的yaml配置文件修改
- common.py配置
- yolo.py配置修改
- 训练yolov7_cotnet.yaml模型
CoTNet理论部分
具有自注意力的 Transformer 引发了自然语言处理领域的革命,最近激发了 Transformer 风格的架构设计的出现,并在众多计算机视觉任务中取得了具有竞争力的结果。然而,大多数现有设计直接在 2D 特征图上使用自注意力来获得基于每个空间位置的隔离查询和键对的注意力矩阵,但未充分利用相邻键之间的丰富上下文。在这项工作中,我们设计了一种新颖的 Transformer 风格的模块,即 Contextual Transformer ( CoT) 块,用于视觉识别。这样的设计充分利用了输入键之间的上下文信息来指导动态注意力矩阵的学习,从而增强了视觉表示的能力。从技术上讲,CoT 块首先通过上下文对输入键进行编码卷积,导致输入的静态上下文表示。我们进一步将编码键与输入查询连接起来,通过两个连续的卷积。学习到的注意力矩阵乘以输入值,以实现输入的动态上下文表示。静态和动态上下文表示的融合最终被作为输出。我们的 CoT 块很有吸引力,因为它可以很容易地替换每个ResNet 架构中的卷积,产生了一个名为 Contextual Transformer Networks ( CoTNet ) 的 Transformer 风格的主干。通过对广泛应用(例如,图像识别、对象检测和实例分割)的广泛实验,我们验证了 CoTNet 作为更强大主干网络的优越性。
Multi-head Self-attention
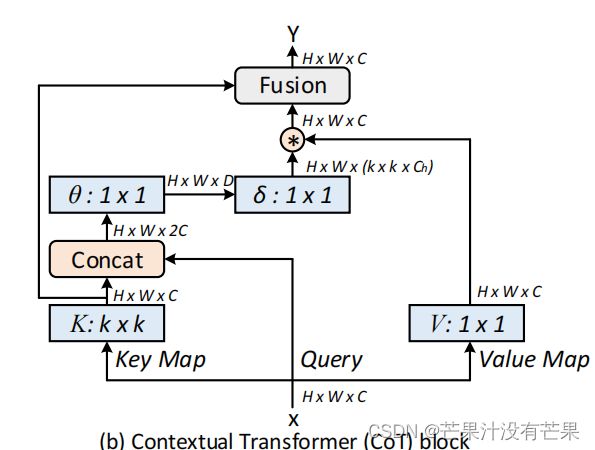
Contextual Transformer (CoT) block结构图
YOLOv7的yaml配置文件修改
增加以下yolov7_cotnet.yaml文件
# YOLOv7 , GPL-3.0 license
# parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [12,16, 19,36, 40,28] # P3/8
- [36,75, 76,55, 72,146] # P4/16
- [142,110, 192,243, 459,401] # P5/32
# yolov7 backbone by yoloair
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [32, 3, 1]], # 0
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
[-1, 1, C3HB, [128]],
[-1, 1, Conv, [256, 3, 2]],
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 16-P3/8
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]],
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]],
[-1, 1, MP, []],
[-1, 1, Conv, [512, 1, 1]],
[-3, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [512, 3, 2]],
[[-1, -3], 1, Concat, [1]],
[-1, 1, C3HB, [1024]],
[-1, 1, Conv, [256, 3, 1]],
]
# yolov7 head by yoloair
head:
[[-1, 1, SPPCSPC, [512]],
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[31, 1, Conv, [256, 1, 1]],
[[-1, -2], 1, Concat, [1]],
[-1, 1, CoT3, [128]],
[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[18, 1, Conv, [128, 1, 1]],
[[-1, -2], 1, Concat, [1]],
[-1, 1, CoT3, [128]],
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3, 44], 1, Concat, [1]],
[-1, 1, CoT3, [256]],
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3, 39], 1, Concat, [1]],
[-1, 3, CoT3, [512]],
# 检测头 -----------------------------
[49, 1, RepConv, [256, 3, 1]],
[55, 1, RepConv, [512, 3, 1]],
[61, 1, RepConv, [1024, 3, 1]],
[[62,63,64], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
]
common.py配置
./models/common.py文件增加以下模块
class CoT3(nn.Module):
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2)
self.m = nn.Sequential(*[CoTBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
# self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)])
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))
class CoTBottleneck(nn.Module):
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super(CoTBottleneck, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = CoT(c_, 3)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class CoT(nn.Module):
# Contextual Transformer Networks https://arxiv.org/abs/2107.12292
def __init__(self, dim=512,kernel_size=3):
super().__init__()
self.dim=dim
self.kernel_size=kernel_size
self.key_embed=nn.Sequential(
nn.Conv2d(dim,dim,kernel_size=kernel_size,padding=kernel_size//2,groups=4,bias=False),
nn.BatchNorm2d(dim),
nn.ReLU()
)
self.value_embed=nn.Sequential(
nn.Conv2d(dim,dim,1,bias=False),
nn.BatchNorm2d(dim)
)
factor=4
self.attention_embed=nn.Sequential(
nn.Conv2d(2*dim,2*dim//factor,1,bias=False),
nn.BatchNorm2d(2*dim//factor),
nn.ReLU(),
nn.Conv2d(2*dim//factor,kernel_size*kernel_size*dim,1)
)
def forward(self, x):
bs,c,h,w=x.shape
k1=self.key_embed(x) #bs,c,h,w
v=self.value_embed(x).view(bs,c,-1) #bs,c,h,w
y=torch.cat([k1,x],dim=1) #bs,2c,h,w
att=self.attention_embed(y) #bs,c*k*k,h,w
att=att.reshape(bs,c,self.kernel_size*self.kernel_size,h,w)
att=att.mean(2,keepdim=False).view(bs,c,-1) #bs,c,h*w
k2=F.softmax(att,dim=-1)*v
k2=k2.view(bs,c,h,w)
return k1+k2
yolo.py配置修改
然后找到./models/yolo.py文件下里的parse_model函数,将加入的模块名CoT3加入进去
在 models/yolo.py文件夹下
- 定位到parse_model函数中
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']):内部- 对应位置 下方只需要增加
CoT3模块
参考示意图
训练yolov7_cotnet.yaml模型
python train.py --cfg yolov7_cotnet.yaml