利用imu估计roll、pitch的理解
这次好好的梳理一下。
先从两种旋转开始说起。
**参考:https://blog.51cto.com/xxpcb/2903395**
1、坐标轴不动,向量绕原点旋转后的关系
旋转前坐标为(x,y,z),旋转后为(x',y',z')。
旋转情况为:
绕z轴旋转yaw,绕y轴旋转pitch,绕x轴旋转roll。
这里明显可知道,每次都是绕的是固定的原坐标系轴,即可以说是外旋。这个也是这里可以统一概念的地方。
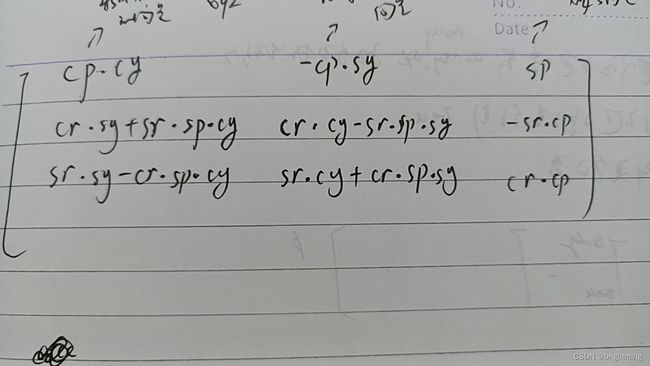
那么旋转矩阵为:
绕z轴旋转后的情况是:
在这个基础上,绕y轴旋转:
在这个基础上,绕x轴旋转:
把矩阵乘起来,就得到完整的矩阵。从等式可以看出来,是Rot_old_to_new的。
2、坐标轴旋转,原来的向量在新的坐标系下的表示
这个本质上,要计算出新的坐标轴的基向量在原坐标轴的表示。
在上一步已经知道了向量的旋转前后的表示关系。如果把这个向量变成坐标轴,再根据以上变化矩阵计算出新的坐标轴的位置,放在转换矩阵中,可以得到rot_new_to_old。没错是,new_to_old,因为是把新的坐标轴的基向量在原坐标系下的值放进去的。
还是按照z->y->x的旋转顺序,可以一次得到(1,0,0),(0,1,0),(0,0,1)旋转后分别是:
 ===》新的x坐标轴在原坐标系的表示
===》新的x坐标轴在原坐标系的表示
 ===》新的y坐标轴在原坐标系的表示
===》新的y坐标轴在原坐标系的表示
 ===》新的z坐标轴在原坐标系的表示。
===》新的z坐标轴在原坐标系的表示。
构建一个Rot3x3矩阵,把这三列,放进去,就得到了Rot_new_to_old矩阵:
回到标题的问题,坐标轴旋转后,原来的向量是在新的坐标系怎么表示呢?
就是这样了,取个逆,得到Rot_old_to_new,再乘上原来的向量,就得到了在新坐标系下的表示。
3、利用这些信息来计算静止状态下的imu的roll、pitch角度
目标是求出,imu的坐标系,相对于Enu坐标系的转换,即Rot_body_to_enu。
已知道在imu下测量到的重力情况为:grav_body=[acc_x,acc_y,acc_z],这个在body坐标系下;
在Enu坐标系下,grav_enu重力的情况为:[0,0,-g] (重力方向向下,enu的z轴向上)。
按照上面的说法,R_new_to_old,可以直接获取,利用关系计算:
grav_enu=R_new_to_old*grav_body
得到:
0=gx=cp*cy*ax-cp*sy*ay+sp*az
0=(cr*sy+sr*sp*cy)*ax+(cr*cy-sr*sp*sy)*ay+sr*cp*az
-g=(sr*sy-cr*sp*cy)*ax+(sr*cy+cr*sp*sy)*ay+cr*cp*az
这个不是很好算。
转换一下思路:
以grav_body为开始坐标,计算grav_enu相对于它的旋转情况,那就比较简单:
grav_body(当做是old) = R_new_to_old * grav_enu(当做是new)
算出这个R_new_to_old后,求个逆,就得到了 grav_body->grav_enu的变化。
因为grav_enu 中的x\y都是0,所以可以得:
ax=sp*gz
ay=-sr*cp*gz
az=cr*cp*gz
那么:pitch=asin(ax/gz) roll=-atan(ay/az)
将角度带入那个R_new_to_old(这里的new、old都是相对来说的,哪个都可以作为new和old),就可以得到这个rot矩阵。此时的含义是env_to_body。
求逆以后,得到body_to_env,再获里面的roll、pitch,就是body相对于enu旋转的角度。
(会不会太绕了,起码思路清晰连贯了)
Eigen::Matrix3d calc_rot_body_to_enu(Eigen::Vector3d grav_in_old,Eigen::Vector3d grav_in_body){
Eigen::Vector3d acc_mea_in_body=grav_in_body;
// std::cout<<"grav_in_old = "<