【python图像处理】python处理图像平滑之均值滤波、方框滤波、高斯滤波及中值滤波
- 一、图像平滑
- 二、均值滤波
- 三、方框滤波
- 四、高斯滤波
- 五、中值滤波
从头开始study,每日积累!
一、图像平滑
什么是图像平滑?
图像平滑是指受传感器和大气等因素的影响,遥感图像上会出现某些亮度变化过大的区域,或出现一些亮点(也称噪声)。这种为了抑制噪声,使图像亮度趋于平缓的处理方法就是图像平滑。图像平滑实际上是低通滤波,平滑过程会导致图像边缘模糊化。
图像平滑是指用于突出图像的宽大区域、低频成分、主干部分或抑制图像噪声和干扰高频成分的图像处理方法,目的是使图像亮度平缓渐变,减小突变梯度,改善图像质量。
图像平滑的方法包括:插值方法,线性平滑方法,卷积法等等。这样的处理方法根据图像噪声的不同进行平滑,比如椒盐噪声,就采用线性平滑方法!图像平滑是一种区域增强的算法,平滑算法还有邻域平均法、中指滤波、边界保持类滤波等。
邻域平均法
图像简单平滑是指通过邻域简单平均对图像进行平滑处理的方法,用这种方法在一定程度上消除原始图像中的噪声、降低原始图像对比度的作用。它利用卷积运算对图像邻域的像素灰度进行平均,从而达到减小图像中噪声影响、降低图像对比度的目的。
但邻域平均值主要缺点是在降低噪声的同时使图像变得模糊,特别在边缘和细节处,而且邻域越大,在去噪能力增强的同时模糊程度越严重。
现在我们来给图片增加噪声
img=cv2.imread("C:/picture/dog.jpg")
rows,cols,chn=img.shape
cv2.imshow("dog",img)
for i in range(5000):
x=np.random.randint(0,rows)
y=np.random.randint(0,cols)
img[x,y,:]=255
cv2.imshow("noise",img)
二、均值滤波
均值滤波是指任意一点的像素值,都是周围N*M个像素值的均值。
Python调用OpenCV实现均值滤波的核心函数如下:
result = cv2.blur(原始图像,核大小)
img=cv2.imread("C:/picture/dog1.png")
source=cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#均值滤波
result=cv2.blur(source,(5,5))
titles=['source','result']
images=[source,result]
for i in range(2):
plt.subplot(1,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
核为10的时候,更加模糊。
如果设置为(1,1)处理结果就是原图,核中每个权重值相同,称为均值。
PS:
plt.imshow()与plt.show()区别?
plt.imshow()函数负责对图像进行处理,并显示其格式,但是不能显示。其后跟着plt.show()才能显示出来。
三、方框滤波
方框滤波和均值滤波核基本一致,区别是需不需要均一化处理。OpenCV调用boxFilter()函数实现方框滤波。函数如下:
result = cv2.boxFilter(原始图像, 目标图像深度, 核大小, normalize属性)
result=cv2.boxFilter(source,-1,(5,5),normalize=1)
在之前均值滤波的基础上进行修改代码
下面是图像左上角处理前后的像素结果:
print(source[0:3,0:3,0])
print(result[0:3,0:3,0])
我们来看看什么是normalize归一化
归一化定义与作用
归一化就是要把需要处理的数据经过处理后(通过某种算法)限制在你需要的一定范围内。首先归一化是为了后面数据处理的方便,其次是保证程序运行时收敛加快。归一化的具体作用是归纳统一样本的统计分布性。归一化在0-1之间是统计的概率分布,归一化在某个区间上是统计的坐标分布。归一化有同一、统一和合一的意思。
归一化的目的简而言之,是使得没有可比性的数据变得具有可比性,同时又保持相比较的两个数据之间的相对关系,如大小关系;或是为了作图,原来很难在一张图上作出来,归一化后就可以很方便的给出图上的相对位置等。
如果省略参数normalize,则默认是进行归一化处理。如果normalize=0则不进行归一化处理,像素值为周围像素之和,图像更多为白色。
normalize=0
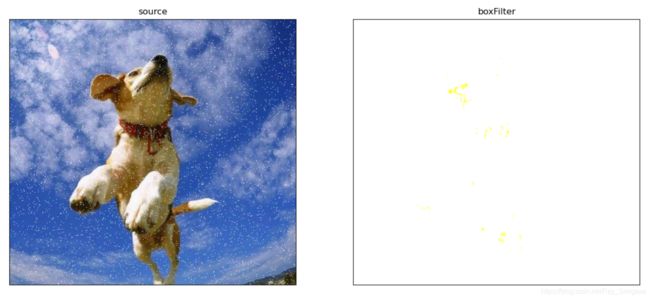
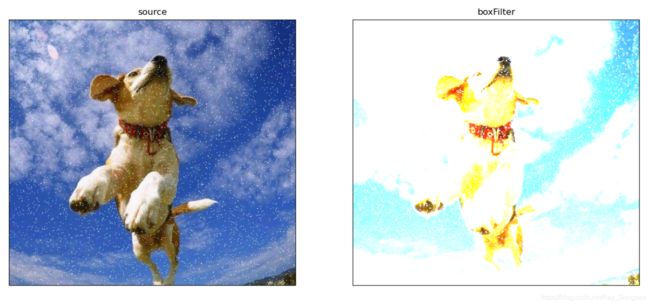
上图很多像素为白色,因为图像求和结果几乎都是255。如果设置的是2*2矩阵,只取四个像素结果要好些。
result = cv2.boxFilter(source, -1, (2,2), normalize=0)
四、高斯滤波
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
Python中OpenCV主要调用GaussianBlur函数,如下:
dst = cv2.GaussianBlur(src, ksize, sigmaX)
result=cv2.GaussianBlur(source,(3,3),0)
如果改成15×15的核,更加模糊
五、中值滤波
中值滤波法是一种非线性平滑技术,它将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值.
中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近的真实值,从而消除孤立的噪声点。方法是用某种结构的二维滑动模板,将板内像素按照像素值的大小进行排序,生成单调上升(或下降)的为二维数据序列。二维中值滤波输出为g(x,y)=med{f(x-k,y-l),(k,l∈W)} ,其中,f(x,y),g(x,y)分别为原始图像和处理后图像。W为二维模板,通常为33,55区域,也可以是不同的的形状,如线状,圆形,十字形,圆环形等。
OpenCV主要调用medianBlur()函数实现中值滤波。图像平滑里中值滤波的效果最好。
dst = cv2.medianBlur(src, ksize)
其中,src表示源文件,ksize表示核大小。核必须是大于1的奇数,如3、5、7等。
result=cv2.medianBlur(img,3)
cv2.imshow("source",img)
cv2.imshow("result",result)
result=cv2.medianBlur(img,9)
the end