单目相机标定(VS + OpenCV + C++ )加速
-
单目相机标定(使用OpenCV)
-
关于相机标定的理论知识和使用Matlab软件进行相机标定请看这篇博文:单目相机标定(使用Matlab)
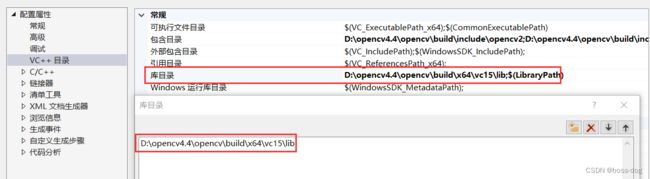
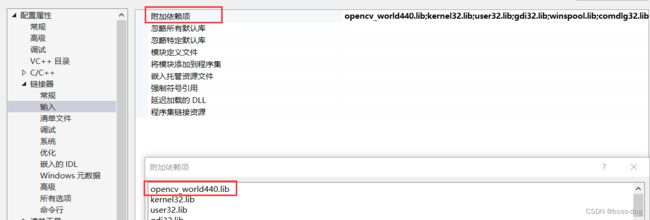
1.VS的环境配置

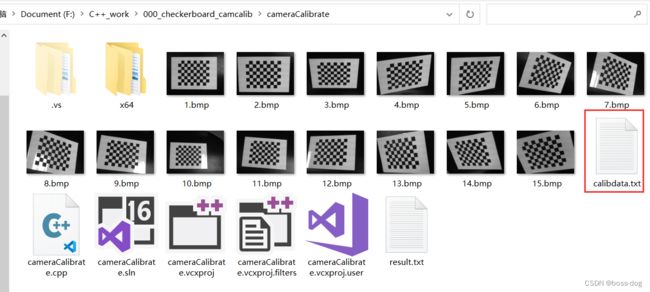
2.源码
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include 3.加速标定速度
将VS编译器由Debug改为Release。

对比:
- Debug
- Release