5-Air-合宙820-点墨水屏
点亮墨水屏
我这里用的是大连佳显的GDEY29Z94,资料戳我
瞅瞅官方例程
官方使用的是epd1in54_GDEH0154D27和epd1in54_GDEH0154D67,同样是大连佳显的,所以我可以省去很多驱动,最主要的就是发送命令和发送数据,如下
local function sendCommand(data)
--log.info("epd1in45.sendCommand",data)
setDC(0)
spi.send(spi.SPI_1,string.char(data))
end
local function sendData(data)
--log.info("epd1in45.sendData",data)
setDC(1)
spi.send(spi.SPI_1,string.char(data))
end
其他的硬件驱动也是已经好的
--电压域
pmd.ldoset(15,pmd.LDO_VLCD)
log.info("spi.setup",spi.setup(spi.SPI_1,0,0,8,13000000,0,0))
local function getBusyFnc(msg)
log.info("Gpio.getBusyFnc",msg)
if msg==cpu.INT_GPIO_POSEDGE then--上升沿中断
--不动作
else--下降沿中断
sys.publish("BUSY_DOWN")
end
end
--初始化三个控制引脚
local getBusy = pins.setup(7,getBusyFnc)
local setRST = pins.setup(12,1)
local setDC = pins.setup(18,1)
-- Display resolution
local EPD_WIDTH = 200
local EPD_HEIGHT = 200
local function wait()
while getBusy() == 1 do -- 0: idle, 1: busy
sys.waitUntil("BUSY_DOWN",5000)
end
end
setDC(1)
下载大连佳显官方驱动

主要函数如下
void EPD_HW_Init(void)
{
EPD_W21_RST_0; // Module reset
driver_delay_xms(100);//At least 10ms delay
EPD_W21_RST_1;
driver_delay_xms(100); //At least 10ms delay
Epaper_READBUSY();
Epaper_Write_Command(0x12); //SWRESET
Epaper_READBUSY();
Epaper_Write_Command(0x01); //Driver output control
Epaper_Write_Data(0x27);
Epaper_Write_Data(0x01);
Epaper_Write_Data(0x00);
Epaper_Write_Command(0x11); //data entry mode
Epaper_Write_Data(0x01);
Epaper_Write_Command(0x44); //set Ram-X address start/end position
Epaper_Write_Data(0x00);
Epaper_Write_Data(0x0F); //0x0F-->(15+1)*8=128
Epaper_Write_Command(0x45); //set Ram-Y address start/end position
Epaper_Write_Data(0x27); //0x0127-->(295+1)=296
Epaper_Write_Data(0x01);
Epaper_Write_Data(0x00);
Epaper_Write_Data(0x00);
Epaper_Write_Command(0x3C); //BorderWavefrom
Epaper_Write_Data(0x05);
Epaper_Write_Command(0x18); //Read built-in temperature sensor
Epaper_Write_Data(0x80);
Epaper_Write_Command(0x21); // Display update control
Epaper_Write_Data(0x00);
Epaper_Write_Data(0x80);
Epaper_Write_Command(0x4E); // set RAM x address count to 0;
Epaper_Write_Data(0x00);
Epaper_Write_Command(0x4F); // set RAM y address count to 0X199;
Epaper_Write_Data(0x27);
Epaper_Write_Data(0x01);
Epaper_READBUSY();
}
/
void EPD_Update(void)
{
Epaper_Write_Command(0x22); //Display Update Control
Epaper_Write_Data(0xF7);
Epaper_Write_Command(0x20); //Activate Display Update Sequence
Epaper_READBUSY();
}
//All screen update
void EPD_WhiteScreen_ALL(const unsigned char *BW_datas,const unsigned char *R_datas)
{
unsigned int i;
Epaper_Write_Command(0x24); //write RAM for black(0)/white (1)
for(i=0;i修改驱动
跟着合宙官方的例程简单修改
function init()
log.info("epd2in9.init","")
reset()
wait()
sendCommand(0x12) --SWRESET
wait()
sendCommand(0x01) --Driver output control
sendData(0x27)
sendData(0x01)
sendData(0x00)
sendCommand(0x11) --data entry mode
sendData(0x01)
sendCommand(0x44) --set Ram-X address start/end position
sendData(0x00)
sendData(0x0F) --0x0F-->(15+1)*8=128
sendCommand(0x45) --set Ram-Y address start/end position
sendData(0x27) --0x0127-->(295+1)=296
sendData(0x01)
sendData(0x00)
sendData(0x00)
sendCommand(0x3C) --BorderWavefrom
sendData(0x05)
sendCommand(0x18) --Read built-in temperature sensor
sendData(0x80)
sendCommand(0x21) -- Display update control
sendData(0x00)
sendData(0x80)
sendCommand(0x4E) -- set RAM x address count to 0
sendData(0x00)
sendCommand(0x4F) -- set RAM y address count to 0X199
sendData(0x27)
sendData(0x01)
wait()
log.info("epd2in9.init","done")
end
function display_frame()
log.info("epd2in9.display_frame","start")
sendCommand(0x22)
sendData(0xF7)
sendCommand(0x20)
wait()
log.info("epd2in9.display_frame","done")
end
function clear()
sendCommand(0x24)
for _=1,4736 do
sendData(0xff)
end
sendCommand(0x26)
for _=1,4736 do
sendData(0x00)
end
display_frame()
log.info("epd2in9.clear","done")
end
--输入值:数组
function showPictureS(picbw)
wait()
log.info("epd2in9.showPicture","")
sendCommand(0x24)
for i=1,4736 do
sendData(picbw[i])
i=i+1
end
sendCommand(0x26)
for i=1,4736 do
sendData(0x00)
i=i+1
end
display_frame()
log.info("epd2in9.clear","done")
end
虽然是三色屏,但我不喜欢红色,所以当黑白屏玩了
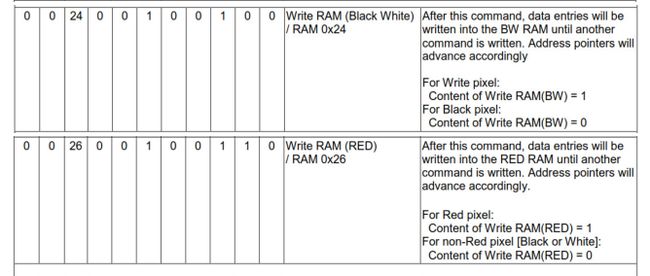
主要就是这俩寄存器,其他的就不多搞了
硬件连接
注意,如果使用的是820开发板:
需要短接下面的引脚
G-CLK ---- SPI-SCLK
G-RES ---- SPI-MISO
G-CS ---- SPI-CSEL
G-DI ---- SPI-MOSI
G-DC ---- UART1-CTS
侧面的跳线需要 按屏幕型号进行选择
(就是绿色端子边上的3pin排针)
RES ---- 3R
或者
RES ---- 0.47R
这里我们是3R
取模

保存到一个lua中
显示
--加载墨水屏功能测试模块
--按需选择
local eink = require"GDEY029Z94"
--加载一下图片数据
local picDatabw = require("gImage_BW")
--显示点东西
sys.taskInit(function ()
sys.wait(5000)
log.info("eink.init")
eink.init()
log.info("eink.refresh")
--清屏
eink.clear()
sys.wait(5000)
eink.init()
--刷图
eink.showPictureS(picDatabw)
eink.deepSleep()
end)
上效果
