Yolov5-6.2 正式发布 | Yolov5 也可以训练分类模型啦,语义分割+实例分割很快到来...
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心技术交流群
后台回复【ECCV2022】获取ECCV2022所有自动驾驶方向论文!
后台回复【领域综述】获取自动驾驶全栈近80篇综述论文!
后台回复【数据集下载】获取计算机视觉近30种数据集!
yolov5-6.2增加了分类训练、验证、预测和导出(所有 11 种格式),还提供了 ImageNet 预训练的 YOLOv5m-cls、ResNet(18、34、50、101) 和 EfficientNet (b0-b3) 模型。
此次发布的主要目标是引入超级简单的 YOLOv5 分类工作流程,就像现有的目标检测模型一样。以下新的 v6.2 YOLOv5-cls 模型只是一个开始,作者将继续与现有的检测模型一起改进这些模型。
下一个版本 v6.3 计划于 9 月发布,将为 YOLOv5 带来官方实例分割支持,今年晚些时候将发布一个主要的 v7.0 版本,更新所有 3 个任务的架构——分类、检测和分割。
1、重要更新
分类模型:TensorFlow、Keras、TFLite、TF.js 模型导出现在使用 python export.py --include saved_model pb tflite tfjs 完全集成。
ClearML日志记录:与开源实验跟踪器 ClearML 集成。使用 pip install clearml 安装将启用集成并允许用户跟踪在 ClearML 中运行的每个训练。这反过来又允许用户跟踪和比较运行,甚至远程安排运行。
Deci.ai优化:一键自动编译和量化 YOLOv5 以获得更好的推理性能。
GPU导出基准:使用 python utils/benchmarks.py --weights yolov5s.pt --device 0 用于 GPU 基准测试或 --device cpu 用于 CPU 基准测试,对所有 YOLOv5 导出格式进行基准测试(mAP 和速度)。
训练可再现性:使用 torch>=1.12.0 的单 GPU YOLOv5 训练现在完全可再现,并且可以使用新的 --seed 参数(默认种子 = 0)。
Apple Metal Performance Shader (MPS) 支持:通过 --device mps 对 Apple M1/M2 设备的 MPS 支持(完整功能在 pytorch/pytorch#77764 中等待更新)。
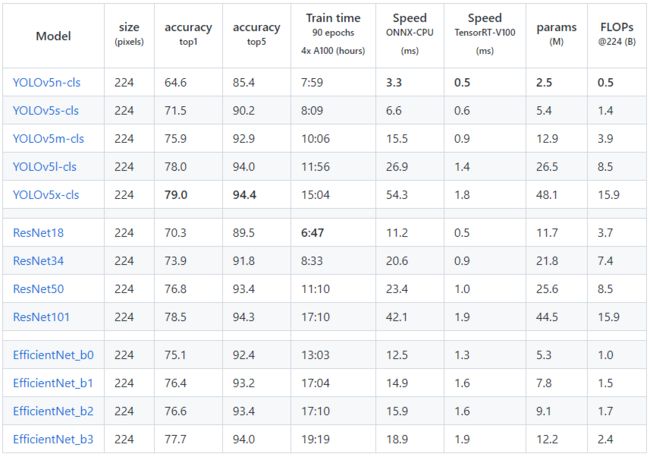
2、分类模型与精度
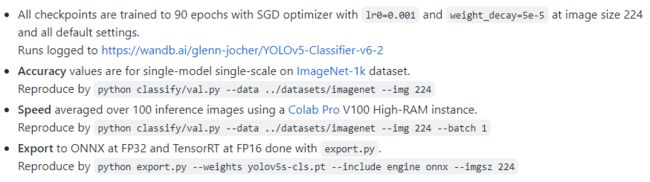
使用 4×A100 在 ImageNet 上训练了 YOLOv5-cls 分类模型 90 个 epoch,并且训练了 ResNet 和 EfficientNet 模型以及相同的默认训练设置进行比较。将所有模型导出到 ONNX FP32 进行 CPU 速度测试,并将所有模型导出到 TensorRT FP16 进行 GPU 速度测试。在 Google Colab Pro 上进行了所有速度测试,以便轻松重现。
3、使用
YOLOv5 分类训练支持使用 --data 参数自动下载 MNIST、Fashion-MNIST、CIFAR10、CIFAR100、Imagenette、Imagewoof 和 ImageNet 数据集。例如,要开始在 MNIST 上进行训练,使用 --data mnist。
train
# Single-GPU
python classify/train.py --model yolov5s-cls.pt --data cifar100 --epochs 5 --img 224 --batch 128
# Multi-GPU DDP
python -m torch.distributed.run --nproc_per_node 4 --master_port 1 classify/train.py --model yolov5s-cls.pt --data imagenet --epochs 5 --img 224 --device 0,1,2,3val
bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G, 50000 images)
python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validatetest
python classify/predict.py --weights yolov5s-cls.pt --data data/images/bus.jpg4、构建形式
分类模型的构建依旧是YOLOv5的风格,加入了分类的head,这里点赞,不怕没有预训练权重了!
class ClassificationModel(BaseModel):
# YOLOv5 classification model
def __init__(self, cfg=None, model=None, nc=1000, cutoff=10): # yaml, model, number of classes, cutoff index
super().__init__()
self._from_detection_model(model, nc, cutoff) if model is not None else self._from_yaml(cfg)
def _from_detection_model(self, model, nc=1000, cutoff=10):
# Create a YOLOv5 classification model from a YOLOv5 detection model
if isinstance(model, DetectMultiBackend):
model = model.model # unwrap DetectMultiBackend
model.model = model.model[:cutoff] # backbone
m = model.model[-1] # last layer
ch = m.conv.in_channels if hasattr(m, 'conv') else m.cv1.conv.in_channels # ch into module
c = Classify(ch, nc) # Classify()
c.i, c.f, c.type = m.i, m.f, 'models.common.Classify' # index, from, type
model.model[-1] = c # replace
self.model = model.model
self.stride = model.stride
self.save = []
self.nc = nc
def _from_yaml(self, cfg):
# Create a YOLOv5 classification model from a *.yaml file
self.model = None参考
https://github.com/ultralytics/yolov5/releases
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D感知、多传感器融合、SLAM、高精地图、规划控制、AI模型部署落地等方向;
加入我们:自动驾驶之心技术交流群汇总!
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D感知、多传感器融合、目标跟踪)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!