点云地面滤波--一种改进的渐进式不规则三角网加密地面滤波算法
文章目录
- 1主要内容
- 2主要方法
- 2.1通过形态学滤波获取潜在的地面种子点
- 2.1.1栅格化点云
- 2.1.2形态学开操作
- 2.1.3识别潜在的种子点
- 2.2获取地面种子点
- 2.3迭代TIN加密
- 2.3.1基于TIN的初始DTM构建
- 2.3.2向下加密点云
- 2.3.3 迭代向上加密点云
- 缓冲区讨论
- 参数
- 文献来源
1主要内容
本文提出了改进的渐进式三角不规则网(TIN)加密(IPTD)地面过滤算法,该算法可以应对各种森林景观,尤其是地形和环境复杂的区域。 IPTD过滤算法包括三个步骤:
- (1)利用形态学方法获取潜在地面种子点;
- (2)获取准确的地面种子点;
- (3)构建基于TIN的模型并迭代加密TIN。
相对于传统渐进式不规则三角网加密滤波算法主要有三个改进点: - (1)地面种子点是通过形态开放操作获得的,而不是使用用户定义的网格中的最低点;
- (2)沿缓冲区模拟地面点参与原有的基于TIN的DTM构建,以提高TIN的质量,避免形成不合适的三角形;
- (3)在向上加密之前进行向下加密,以提高IPTD处理斜率变化的能力
2主要方法
主要流程如下图:
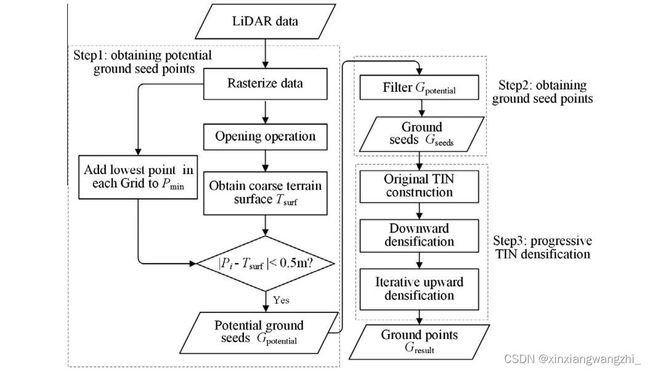
第一步使用形态学开运算获得潜在地面种子点 G p o t e n t i a l G_{potential} Gpotential。第二步过滤潜在的地面种子点,得到精确的地面种子点 G S e e d s G_{Seeds} GSeeds,第三步对 G S e e d s G_{Seeds} GSeeds进行加密,使用迭代加密TIN方法提取地面点。所提方法的概述如下图所示:
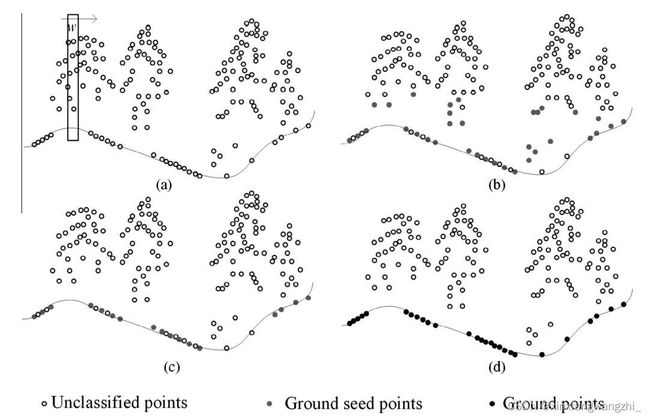
(a) raw LiDAR data, where w is the structure element of the opening operation; (b) potential ground seed points (labeled with gray circles) identified using the opening operation; © accurate ground seed points after eliminating the non-ground points, and the eliminated non-ground points are labeled as unclassified points (labeled with empty circles); and (d) extracted ground points (labeled with black circles) using progressive TIN densification. In the final step, the remaining unclassified points are taken as non-ground points.
2.1通过形态学滤波获取潜在的地面种子点
2.1.1栅格化点云
本文选取每个栅格中的最低点进行栅格化,得到栅格大小设置为1m的栅格数据 P g r i d Pgrid Pgrid。数据集 P m i n Pmin Pmin记录了每个网格中的最低点,以便以后使用。
点云数据缺失导致曲面不连续,降低了滤波结果的精度。为了解决这个问题,将形态学闭操作作用于二值图像,获取非数据(空白)区域。然后,我们可以通过从扩张区域中减去原始区域来获得非数据区域的边界。最后,使用边界处最低单元格的高度来填充非数据区域。其他小的非数据区域用其最近的单元格的高度值填充。
2.1.2形态学开操作
将 P g r i d Pgrid Pgrid应用开操作,以获取粗略近似地形表面 T s u r f Tsurf Tsurf。
膨胀、腐蚀、开操作定义如下:
erosion ( g ) = min ( x g , y g ) ∈ w ( z g ) (1) \operatorname{erosion}(g)=\min _{\left(x_g, y_g\right) \in w}\left(z_g\right)\tag{1} erosion(g)=(xg,yg)∈wmin(zg)(1)
dilation ( g ) = max ( x g , y g ) ∈ w ( z g ) (2) \operatorname{dilation}(g)=\max _{\left(x_g, y_g\right) \in w}\left(z_g\right)\tag{2} dilation(g)=(xg,yg)∈wmax(zg)(2)
open ( g ) = max ( x g , y g ) ∈ w ( min ( z g ) ) (3) \operatorname{open}(g)=\max _{\left(x_g, y_g\right) \in w}\left(\min \left(z_g\right)\right)\tag{3} open(g)=(xg,yg)∈wmax(min(zg))(3)
点集 ( x g , y g , z g ) (x_g, y_g,z_g) (xg,yg,zg)是点 g g g在窗口大小 w w w下的近邻点云。窗口大小对于形态学滤波非常关键,文中定义窗口大小为3*3。
2.1.3识别潜在的种子点
将 P m i n Pmin Pmin中各点的高程与 T s u r f Tsurf Tsurf进行了比较。若绝对高差小于0.5m,则认定该点为潜在地面种子点,并将其加入 G p o t e n t i a l Gpotential Gpotential。
2.2获取地面种子点
应用形态学开运算后,某些非地面点可能被错误地包含在 G p o t e n t i a l Gpotential Gpotential中。为了消除这些非地面点,我们使用了平移平面拟合的方法对其进行识别。
在 G p o t e n t i a l G potential Gpotential中,每个点 P i Pi Pi及其最近邻的 k k k个点,在三维空间中使用kdtree方法(Bentley , 1990)搜索,通过特征值方法( Pauly , 2003)获得局部拟合平面 F a Fa Fa。最小特征值对应的特征向量即为拟合平面的法向量。由于大部分非地面点被移除,因此 G p o t e n t i a l G potential Gpotential中非地面点的分布是分散的,高程变化较大。如果 P i Pi Pi是一个非地面点,则 F a Fa Fa可能是一个拟合较差的平面,或者 P i Pi Pi与 F a Fa Fa之间的距离可能较大。这两种情况都会导致较大的 r r r, r r r是通过用k个近邻点和平面 F b Fb Fb通过公式( 4 )计算得到的。 F b Fb Fb是一个新的平移平面,通过平行移动 F a Fa Fa使其通过 P i Pi Pi。如果 r r r大于阈值,点 P i Pi Pi有很大可能成为一个非地面点,将其从 G p o t e n t i a l Gpotential Gpotential中删除。将 G p o t e n t i a l Gpotential Gpotential中剩余的点(筛选后的种子点)加入到地面种子点 G S e e d s GSeeds GSeeds中。
r = ∑ i = 1 k ( dis ( P i , F b ) ) 2 k r=\sqrt{\frac{\sum_{i=1}^k\left(\operatorname{dis}\left(P_i, F_b\right)\right)^2}{k}} r=k∑i=1k(dis(Pi,Fb))2
d i s ( P i , F b ) {dis}\left(P_i, F_b\right) dis(Pi,Fb): P i P_i Pi到 F b F_b Fb距离。
2.3迭代TIN加密
在这个过程中,我们执行两个改进:( 1 )设置缓冲区和模拟地面点以消除边缘效应,( 2 )在向上加密之前执行向下加密。具体内容如下所述:
2.3.1基于TIN的初始DTM构建
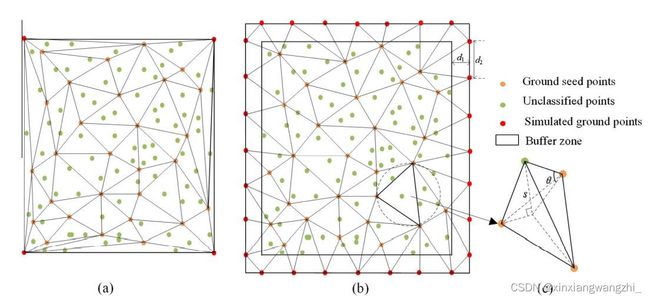
为了确保所有的点都位于TIN中,Zhang和Lin ( 2013 )选择了研究地点的四个角落作为模拟地面点,将其连接到 G s e e d Gseed Gseed中创建TIN。然而,该方法生成了基于TIN的DTM与沿边界的狭长三角形(下图a所示 )。
为了解决边缘狭长三角形问题,我们设置了一个d1宽度缓冲区来扩展数据处理区域。沿缓冲区边界,以固定间隔d2布置模拟地面点,以处理场地边缘周围的点(下图b )。一个模拟地面点的高度与它在 G S e e d s G Seeds GSeeds中的最近点的高度相同。在实验中,d2设置为30米。模拟地面点的模式解决了边缘效应问题,提高了TIN中三角形的质量,如下图b所示。
2.3.2向下加密点云
IPTD(本文算法简称)在向上致密化之前进行向下致密化,以提高基于初始TIN的DTM的质量。一般而言,大部分点云在TIN上面,而少数点在TIN下面。当它们到TIN的距离大于s时,TIN下面的地面点将被误分为非地面点。这可能造成地面点被错误分为非地面点。
如下图所示,TIN下面的点P3、P4和P5属于地形,但它们不太可能被识别为地面点,因为它们与TIN之间的距离可能大于s。相反,点P1和P2将被添加到TIN中,因为它们都靠近TIN。因此,这将产生一个高于实际地面的基于TIN的DTM。为了解决这种情况,我们进一步研究TIN中每个三角形下面的点。在三角形下方的点云中,与三角形面的垂直距离最大的点标识为地面点,并添加到更新TIN中。向下致密化后,P3加入TIN,面片变为虚线表示的TIN面片。现在,P4和P5有很高的概率被归类为地面点在下一步的迭代向上致密化。

2.3.3 迭代向上加密点云
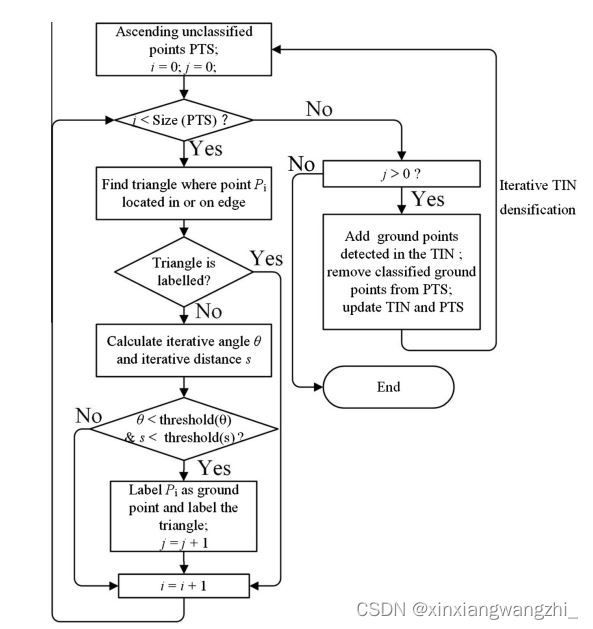
在迭代向上致密化的过程中,这里有两个迭代参数: h 和 s h和s h和s。当h和s不大于相应的阈值时,未分类的点被标识为地面点。详细步骤下图所示。需要说明的是,未分类点按高程升序排列,因为我们认为满足迭代准则的高程较低的点更可能是地面点。
缓冲区讨论
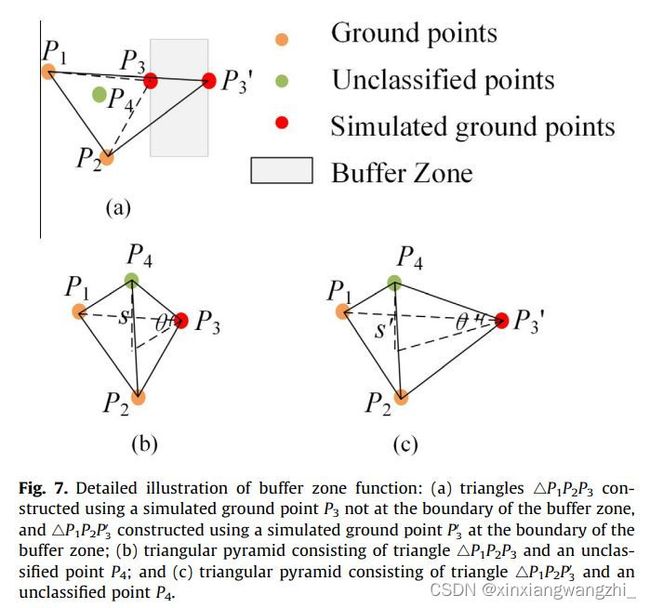
由于模拟的地面点(初始迭代中模拟边界点)实际上并不存在,它们在迭代过程中的影响是不确定的,因此这种影响应该被消除;这就是设置缓冲区的目的。
在本文中,宽度d1被设置为30 m,这被认为是足够大的,以避免将模拟的地面点作为离未分类点最近的节点。例如,如图7a所示,模拟点P03和P3分别位于有缓冲区和无缓冲区的边缘。
图7b和c分别显示了包含P3和P’3的三角形的加密过程。在这里,P3靠近P1和P2,并且P3可能是离P4最近的节点。图7b中的 θ \theta θ值可用于与阈值进行比较。模拟点对未分类点的确定有影响。缓冲区延长了P4和P’3之间的连线,防止P’3成为最接近P4的点,并避免了 θ \theta θ和阈值角度之间的比较(图7c )。
参数
如上所述,IPTD中使用了四个参数,即k、r、h和s。实际上一共8个参数,还有两个和形态学相关的参数,两个和缓冲区相关的参数,文中进行了设置(加粗部分)。
文献来源
《Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas》