二十五. 智能驾驶之基于点云分割和聚类的障碍物检测
在智能驾驶领域, 根据使用的传感器的不同,对障碍物的检测和识别通常有3种做法:
1.一种是基于相机图像和点云鸟瞰图的纯图像障碍物检测, 比如YOLO三维;
2.一种是将相机和雷达进行联合标定, 使用相机图像,利用基于深度学习的物体检测网络识别图像中物体,将相机得到的检测目标投射到3维的点云空间,融合图像检测和点云聚类实现目标检测和分类;
3.另一种是,直接利用激光雷达的点云,利用传统方法进行点云分割和聚类,也有利用基于点云的神经网络如PointNet++等, 识别出路面和障碍物;
本例采用第3种方法中较传统的方法, 直接通过对点云的分割和聚类实现障碍物检测.
技术难点有两点:
1>. 地面和非地面点云分割;
基本思路是: 将基于3维笛卡尔坐标系的所有点云点坐标(x,y,z), 映射为以雷达为中心,以地面平面X-Y为基面的(d,θ,z)坐标系.
这里的d: 为点云中某点在X-Y平面的投影点,到雷达中心点的距离. 计算公式很简单:
这里的θ: 为点云点 投影到X-Y平面的点,与X轴正方向轴的夹角, 其取值范围为: [0,360]. 假设都是基于角度的话, 其计算公式为: 
这里的z: 为点云点在其原3维笛卡尔坐标系中的坐标z值.
下一步就是给这些无序的(d,θ,z)点分门别类了. 其思路如下:
其原理非常类似于电脑磁盘的扇区和柱面. 一个硬盘有若干个盘面, 相当于(x,y,z),坐标系的不同的z坐标值; 每个盘面又以一定的角度区间划分为不同的扇区, 相当于不同θ扇区; 每个扇面上又划分不同的同心径向磁道(所有盘面叠在一起就是一个同心径向柱),相当于公式中的d值.
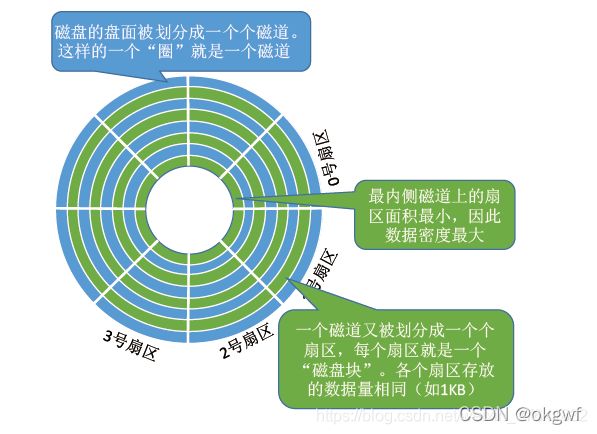
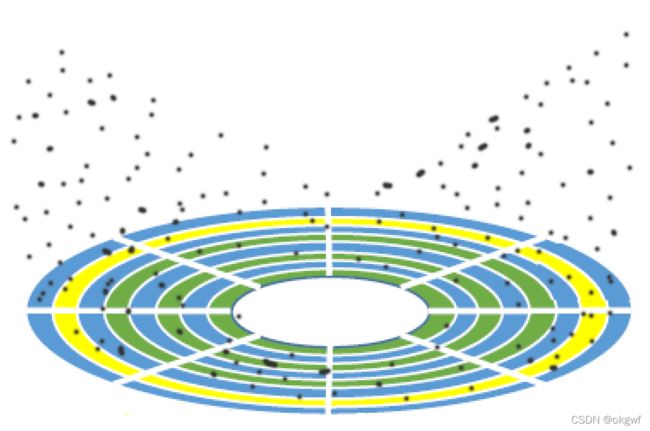
一般基于雷达扫描一圈的角度分辨率,比如单线一圈2000个扫描点, 那么紧邻两点之间的角度变化就是: 360/2000 = 0.18度. 基于此,我们把X-Y平面以雷达为中心分成2000个扇区, 按照径向距离的不同,分出若干的同心环道(类似磁盘的磁道),比如64线激光雷达,我们可以分出64个同心环道. 这样所有的点云中的点, 就被我们有序地分布到基于不同θ的扇区, 不同径向距离d的径向环道, 而其z值 仍然是在原始点云中的高度值z.
类似下图的效果:
有了上述的(d,θ,z)坐标系有序点, 下一步只需要对每个径向扇区内由近到远的各个径向环道内点,进行基于斜率阈值的直线拟合即可.
2>. 点云聚类;
这块主要是利用pcl库的,基于KD树的欧几里德聚类, 具体理论这里就不阐述了, 主要接口类:
pcl::search::KdTree
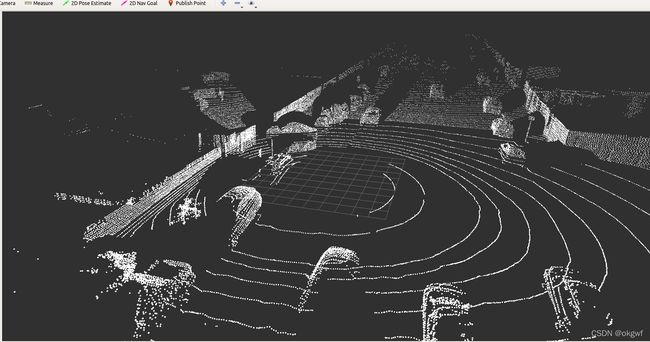
一. 获取原始点云信息
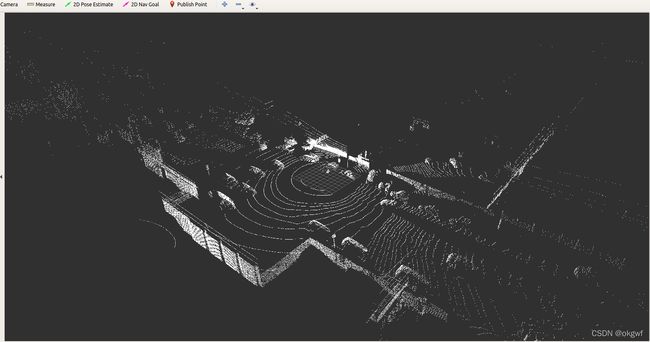
二. 原始点云数据量较大,为降低后续计算量,对点云进行体素(Voxel)降采样或称稀疏化.
降采样前:
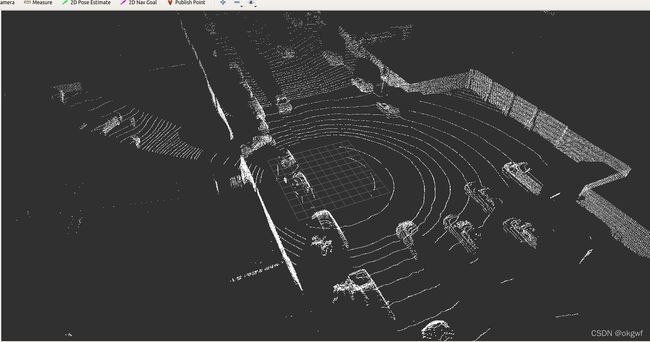
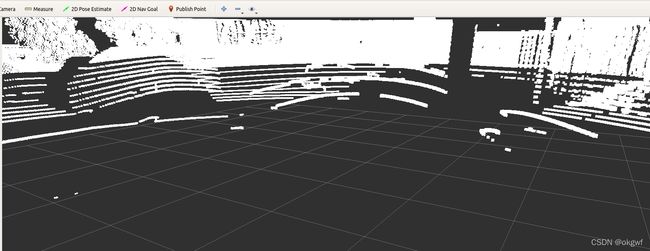 降采样后:
降采样后: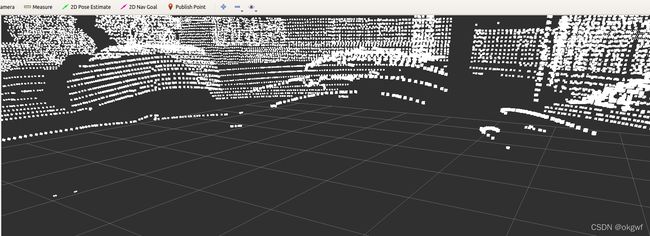
//下采样后点云
pcl::PointCloud::Ptr cloud_filtered(new pcl::PointCloud());
//体素滤波
pcl::VoxelGrid voxelFilter;
voxelFilter.setInputCloud(originPointCloud);
voxelFilter.setLeafSize(0.1f,0.1f,0.1f);
voxelFilter.filter(*cloud_filtered); 三. 裁剪点云, 去除高于车身顶部的点云点, 同样为了降低后续计算量.
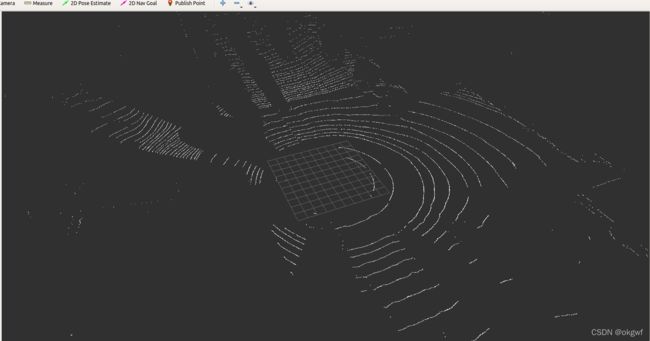
裁剪顶部以上点云前:
裁剪顶部以上点云后:
这里基本是基于z坐标高度和x-y的进行距离过滤, 代码很简单.
四. 分离出地面和非地面点云
为了视觉直观, 切换个合适角度:
分离出的地面点云:
分离出的非地面点云, 用于后续障碍物检测,做点云分割和聚类:
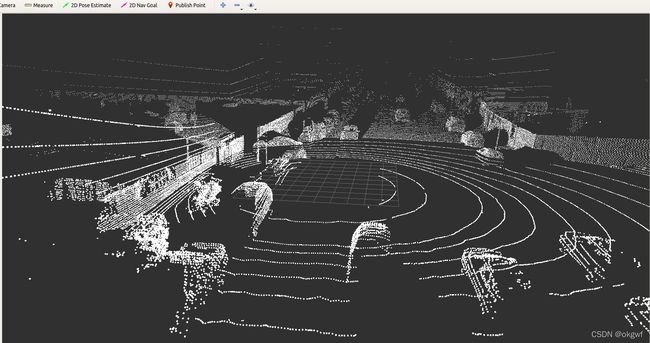
五. 点云分割和聚类
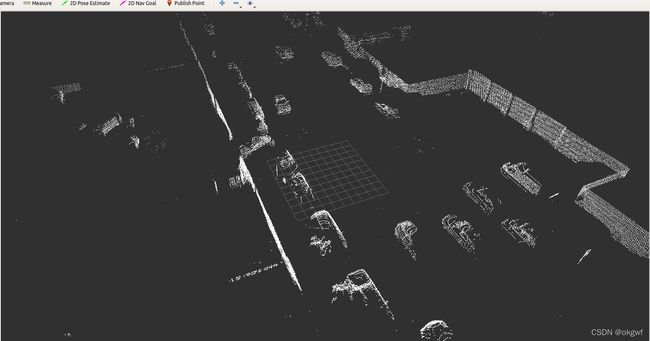
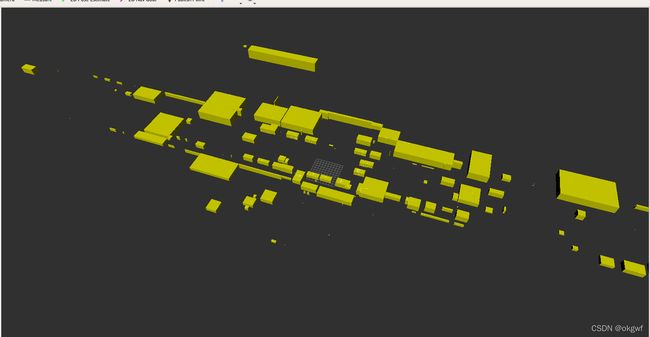
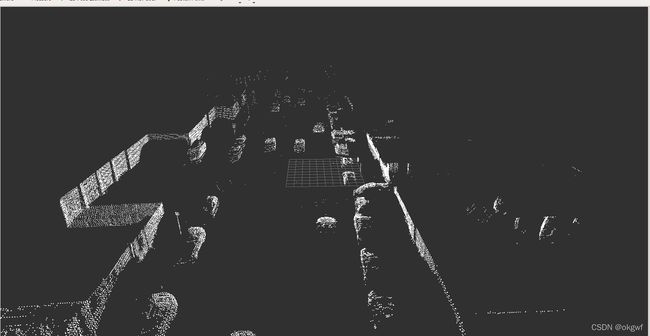
换个合适角度,俯视全局点云:

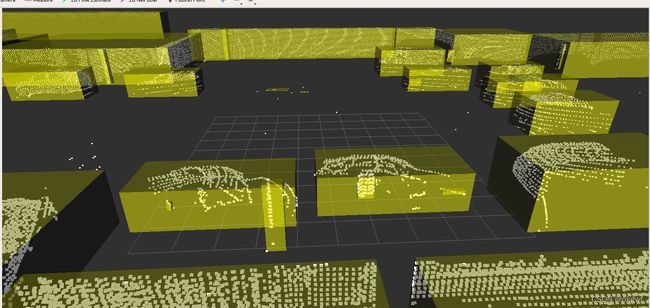
从俯视角度,查看分割和聚类结果:
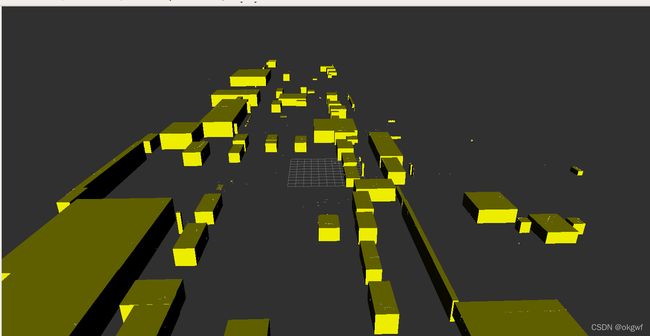
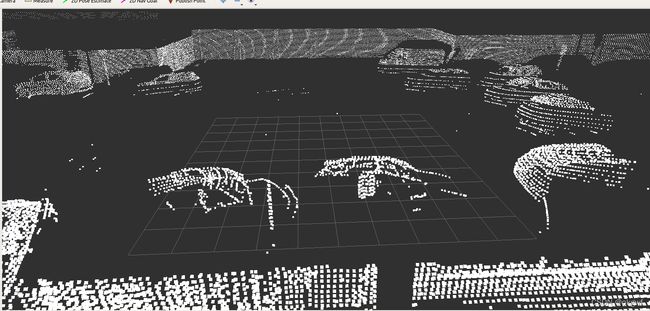
回到地面,换个角度,查看点云:
从地面角度,查看分割和聚类结果:
走近查看细节点云:
走仅查看细节分割和聚类结果:
pcl::search::KdTree::Ptr tree(new pcl::search::KdTree);
//create 2d point cloud
pcl::PointCloud::Ptr cloud_2d(new pcl::PointCloud);
pcl::copyPointCloud(*pointCloud, *cloud_2d);
for (size_t i = 0; i < cloud_2d->points.size(); i++)
{
cloud_2d->points[i].z = 0; //仅在X-Y平面聚类,不需要考虑z坐标
}
if (cloud_2d->points.size() > 0)
tree->setInputCloud(cloud_2d);
std::vector pointIndices;
pcl::EuclideanClusterExtraction euclid;
euclid.setInputCloud(cloud_2d);
euclid.setClusterTolerance(in_max_cluster_distance);
euclid.setMinClusterSize(MIN_CLUSTER_SIZE);
euclid.setMaxClusterSize(MAX_CLUSTER_SIZE);
euclid.setSearchMethod(tree);
euclid.extract(pointIndices);