ROS多机通信——SSH有线连接及无线连接|主从机设置|远程控制(上)
目录
一、前言
二、ROS多机通信—有线及无线连接
有线连接
无线连接
三、其他注意事项
一、前言
因业务需要,需在本机电脑运行python代码(代码必须是基于ros环境开发的,并编译正确),来控制远程机器人(远程机器人也是基于ros系统进行运动控制)。中间涉及ros的多机通信(包括有线连接和无线连接两种方法)、ros主从机设置、ros远程控制。经过几天的实机操作,算是有所体会,分享出来希望能帮助到大家。有不准确的地方还请留言区指正。
二、ROS多机通信—有线及无线连接
-
有线连接
1、用网线将本机与机器人连接
连上网线后,在有线网设置的地方点击“连接”
2、固定两台电脑的ip到同一个子网
这里可能有的人不知道什么叫一个子网,本人也非计算机专业,不过根据我的理解,就是ip的前三个数字相同。如:
本机:192.168.1.104
机器人:192.168.1.110
这两个ip仅仅最后一位不同。
那么怎么将两台电脑的ip改到一个子网了?本机电脑和机器人的系统都是ubuntu18.04,本机的ip设置方法如下图所示:

即把IPV4方式改为手动,将ip地址设置为:192.168.1.104
在机器人上的设置方法类似,将机器人的ip地址设置为:192.168.1.110
但是ip太长不好记,于是我们需要给ip取一个名字,这就是连接用hostname,即建立ip与连接用hostname的映射关系。
可能又有人不知道什么是hostname,什么是username,那么请看下图:

绿色字体中,@前面的是username,@后面的是hostname(本机真实hostname),即username@hostname,本人电脑的两个名字相同都是zoukun。
*另外需要注意的是,这里给ip起的hostname是一个临时名字,用于连接使用。这个hostname可以与本机真实hostname相同或不同,但为了区分最好还是设置为不同。为了方便理解及后文表述,这里给出两台电脑的有关参数。
| 电脑 | username | hostname | ip | 连接用hostname(自己设置的) |
| 本机(A) | zoukun | zoukun | 192.168.1.104 | ubuntu18-dell |
| 机器人(B) | nvidia | tegra-nvidia | 192.168.1.110 | nvidia |
*表中username与hostname两列为电脑的固有参数。ip与连接用hostname两列为连接前需要手动设置的参数。
3、在两台电脑的hosts文件中添加设置的两个ip及对应的hostname
执行该步骤就是建立ip与连接用hostname之间的映射关系,这样就可以在后面的场合使用连接用hostname代替ip,进行连接及主从机设置。修改hosts需要root权限,执行指令如下:
zoukun@zoukun:~$ sudo gedit /etc/hosts
[sudo] zoukun 的密码:输入sudo密码进入hosts文件编辑,将如下两行添加到hosts文件中,一般是第三行的位置,并保存退出:
192.168.1.104 ubuntu18-dell #有线连接
192.168.1.110 nvidia #有线连接注意:两台电脑的hosts文件都需要加入这两行,机器人上的操作同上。修改后需要重启电脑。
4、进行连接
执行如下代码:
ssh username@连接用hostname这里username就是需要连接电脑的username,连接用hostname就是前面手动给ip起的临时hostname名字
以本机(A)连接机器人(B)为例,执行代码如下:
ssh nvidia@nvidia输入nvidia@nvidia的密码即可连接。
还可以通过直接ip进行连接,执行代码如:
ssh [email protected]*温馨提示: 如果只需要连接两台电脑(不需要ros交互),只需进行1、2步即可,连接方式便是通过上面的ip方式连接。
进行3、4操作的目的一个是为了连接方便(可以通过连接用hosename进行连接),另一个就是为了方便后面主从机设置及ros交互。
-
无线连接
无线连接的步骤与有线连接类似,不同的地方在于ip的获取和设置。
1、将两台电脑连接到同一个局域网(子网)
方法有两种:将其中一台电脑设置为wifi发射器,另一台电脑进行连接;两台电脑同时连接到一个路由器(局域网)上。
2、获取两台电脑分配的ip,并进行ip固定
两台电脑连接到同一局域网后,通过ifconfig指令分别查看两台电脑分配的ip,并进行ip固定,方法同有线连接相同。
这里两台电脑被分配的ip如下:
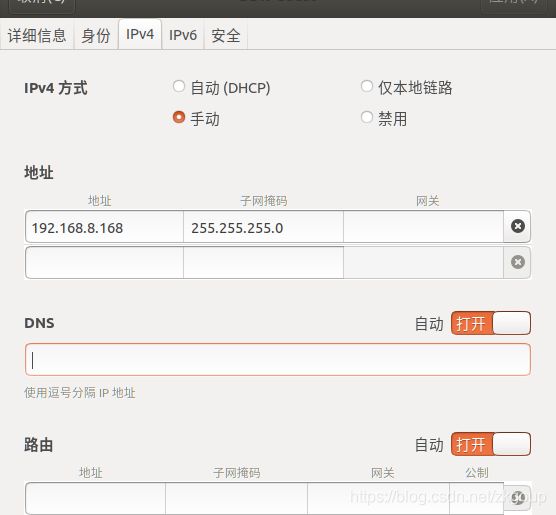
本机:192.168.8.168
机器人:192.168.8.1
ip固定方法与有线连接相同,如下图在wifi设置中,修改IPV4方式为手动,并设置ip地址为本机分配的ip,如下图所示:
无线连接模式下两台电脑设置的有关参数如下:
| 电脑 | 连接用hostname | ip |
| 本机(A) | ubuntu18-wifi | 192.168.8.168 |
| 机器人(B) | nvidia-wifi | 192.168.8.1 |
后面的步骤与有线连接相同。 最后别忘了重启。其实进行这么多步的设置是为了后面的主从机设置及远程控制不出现bug。不然后面roscore启动不了,或者远程控制机器人没有响应找不到原因。
关于主从机设置、远程控制将在下一篇博文分享。由于本人接触ROS时间较短,有不对的地方还请评论区指正。
三、其他注意事项
在不进行ROS通信时,需要将电脑的IPV4方式改回“自动”,不然电脑可能会无法联网。