特征值特征向量和奇异值分解精彩片段汇总
一、几何角度理解奇异值分解SVD
https://baijiahao.baidu.com/s?id=1620247228491947246&wfr=spider&for=pc
http://blog.sciencenet.cn/blog-696950-699432.html
https://www.jianshu.com/p/e574e91070ad
https://www.jianshu.com/p/103466ec983e
https://www.cnblogs.com/LeftNotEasy/archive/2011/01/19/svd-and-applications.html
(一)、左乘矩阵的几何意义
向量左乘对角矩阵,几何上相当对这个向量的长度进行缩放,此处坐标轴保持不变; 向量左乘对称矩阵,几何上相当于对这个向量的长度进行缩放,并且对坐标轴也进行旋转; 给向量左乘普通矩阵,总能找到一组正交的坐标轴来表示该向量,这组坐标轴是由原来的坐标轴通过缩放和旋转而得到。我们看一下在坐标轴上的几何变化:
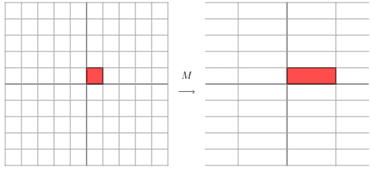
让我们来看一些简单的线性变换例子,以 2 X 2 的线性变换矩阵为例,首先来看一个较为特殊的,对角矩阵:

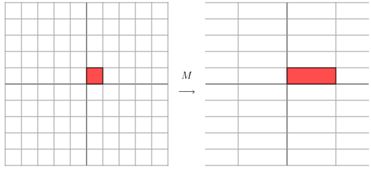
从几何上讲,M 是将二维平面上的点(x,y)经过线性变换到另外一个点的变换矩阵,如下图所示

变换的效果如下图所示,变换后的平面仅仅是沿 X 水平方面进行了拉伸3倍,垂直方向是并没有发生变化。
1、左乘对角阵:

2、左乘对称阵:
现在看下矩阵

这个矩阵产生的变换效果如下图所示
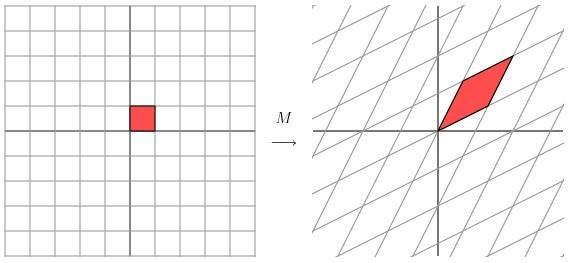
这种变换效果看起来非常的奇怪,在实际环境下很难描述出来变换的规律 ( 这里应该是指无法清晰辨识出旋转的角度,拉伸的倍数之类的信息)。还是基于上面的对称矩阵,假设我们把左边的平面旋转45度角,然后再进行矩阵 M 的线性变换,效果如下图所示:
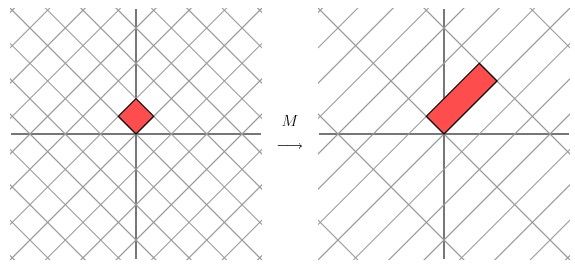
看起来是不是有点熟悉? 对的,经过 M 线性变换后,跟前面的对角矩阵的功能是相同的,都是将网格沿着一个方向拉伸了3倍。
这里的 M 是一个特例,因为它是对称的。非特殊的就是我们在实际应用中经常遇见一些 非对称的,非方阵的矩阵。如上图所示,如果我们有一个 2 X 2 的对称矩阵 M 的话,我们先将网格平面旋转一定的角度,M 的变换效果就是在两个维度上进行拉伸变换了。
用更加数学的方式进行表示的话,给定一个对称矩阵 M ,我们可以找到一些相互正交 Vi ,满足 MVi 就是沿着 Vi 方向的拉伸变换,公式如下:
Mvi = λivi
这里的 λi 是拉伸尺度(scalar)。从几何上看,M 对向量 Vi 进行了拉伸,映射变换。Vi 称作矩阵 M 的特征向量(eigenvector), λi 称作为矩阵 M 特征值(eigenvalue)。这里有一个非常重要的定理,对称矩阵 M 的特征向量是相互正交的。
如果我们用这些特征向量对网格平面进行线性变换的话,再通过 M 矩阵对网格平面进行线性换的效果跟对 M 矩阵的特征向量进行线性变换的效果是一样的。
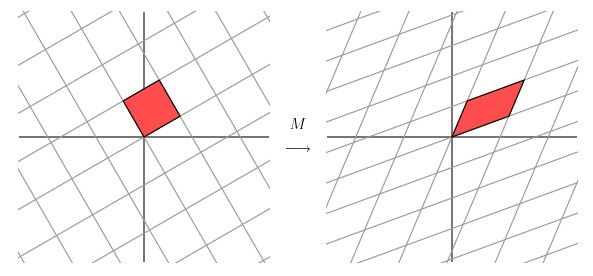
对于更为普通的矩阵而言,我们该怎么做才能让一个原来就是相互垂直的网格平面(orthogonal grid), 线性变换成另外一个网格平面同样垂直呢?PS:这里的垂直如图所示,就是两根交错的线条是垂直的。

经过上述矩阵变换以后的效果如图

从图中可以看出,并没有达到我们想要的效果。我们把网格平面旋转 30 度角的话,然后再进行同样的线性变换以后的效果,如下图所示
让我们来看下网格平面旋转60度角的时候的效果。
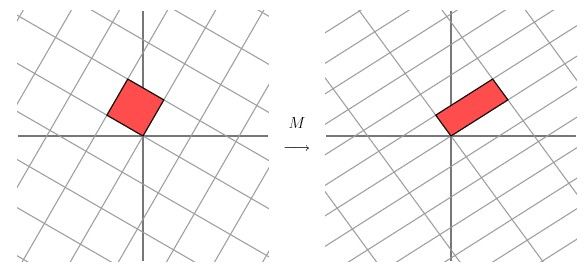
嗯嗯,这个看起来挺不错的样子。如果在精确一点的话,应该把网格平面旋转 58.28 度才能达到理想的效果。

3、左乘任意阵
对于任意的矩阵,我们总能找到一组坐标轴,来表示该向量。这个新的坐标体系是由原来的坐标轴通过缩放和旋转得到。

(二)、SVD的几何意义
奇异值分解SVD ( The singular value decomposition )从几何意义上来说:对于任意矩阵M,通过SVD。可以将一个相互垂直的坐标变换到另外一个相互垂直的坐标。
问题描述:
用v1和v2分别表示原来坐标系中的单位向量, 经过左乘矩阵M后,向量Mv1和 Mv2正交。用u1 和 u2分别表示Mv1 和 Mv2方向上的单位向量,那么:
σ1* u1= Mv1
σ2* u2= Mv2
σ2 和 σ2分别表示这不同方向向量上的模。
设现有一个向量x,那么在变换前,其表达式为:
x = (v1·x) *v1 + (v2·x) *v2
向量点乘v1·x,表示x在v1上投影乘以v1的模,由于v1是单位向量,模为1,所以这个向量点乘,就是x在v1上投影,向量x在两个正交向量的投影乘对应的向量,然后相加就是向量x。
经过M线性变换后的向量的表达形式:
Mx= (v1·x) σ1u1 + (v2·x) σ2u2
而我们对原坐标空间表达式,等式两边同乘以矩阵M:
Mx= (v1· x) Mv1 + (v2· x) Mv2
由于v1·x是一个标量, Mv1是一个向量,所以可以变换位置如下:
Mx= u1σ1 v1Tx + u2σ2 v2Tx
进而,由于u1和v1都是列向量,u1σ1 v1T就是两个向量点乘后乘以一个标量
于是可得:
M = u1σ1 v1T + u2σ2 v2T
表示成:
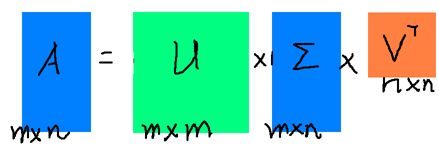
M = UΣVT
u 矩阵的列向量分别是u1,u2 ,Σ 是一个对角矩阵,对角元素分别是对应的σ1 和 σ2,V 矩阵的列向量分别是v1,v2。
以上表明任意矩阵 M 是可以分解成三个矩阵。V表示了原始域的标准正交基,u表示经过 M 变换后的标准正交基,Σ 表示V中的向量与u中 相对应向量之间的关系。
奇异值分解( The singular value decomposition )
该部分是从几何层面上去理解二维的SVD:对于任意的 2 x 2 矩阵,通过SVD可以将一个相互垂直的网格(orthogonal grid)变换到另外一个相互垂直的网格。
我们可以通过向量的方式来描述这个事实: 首先,选择两个相互正交的单位向量 v1 和 v2, 向量Mv1 和 Mv2 正交。
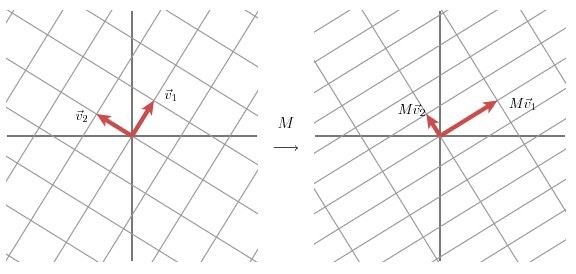
u1 和 u2分别表示Mv1 和 Mv2的单位向量,σ1 * u1 = Mv1 和 σ2 * u2 = Mv2。σ1 和 σ2分别表示这不同方向向量上的模,也称作为矩阵 M 的奇异值。

这样我们就有了如下关系式
Mv1 = σ1u1
Mv2 = σ2u2
我们现在可以简单描述下经过 M 线性变换后的向量 x 的表达形式。由于向量v1 和 v2是正交的单位向量,我们可以得到如下式子:
x = (v1 x) v1 + (v2x) v2
x) v1 + (v2x) v2
这就意味着:
Mx = (v1x) Mv1 + (v2x) Mv2
Mx = (v1x) σ1u1 + (v2x) σ2u2
向量内积可以用向量的转置来表示,如下所示
vx = vTx
最终的式子为
Mx = u1σ1 v1Tx + u2σ2 v2Tx
M = u1σ1 v1T + u2σ2 v2T
上述的式子经常表示成
M = UΣVT
u 矩阵的列向量分别是u1,u2 ,Σ 是一个对角矩阵,对角元素分别是对应的σ1 和 σ2,V 矩阵的列向量分别是v1,v2。上角标 T 表示矩阵 V 的转置。
这就表明任意的矩阵 M 是可以分解成三个矩阵。V 表示了原始域的标准正交基,u 表示经过 M 变换后的co-domain的标准正交基,Σ 表示了V 中的向量与u 中相对应向量之间的关系。(V describes an orthonormal basis in the domain, and U describes an orthonormal basis in the co-domain, and Σ describes how much the vectors in V are stretched to give the vectors in U.)
如何获得奇异值分解?( How do we find the singular decomposition? )
事实上我们可以找到任何矩阵的奇异值分解,那么我们是如何做到的呢?假设在原始域中有一个单位圆,如下图所示。经过 M 矩阵变换以后在co-domain中单位圆会变成一个椭圆,它的长轴(Mv1)和短轴(Mv2)分别对应转换后的两个标准正交向量,也是在椭圆范围内最长和最短的两个向量。

换句话说,定义在单位圆上的函数|Mx|分别在v1和v2方向上取得最大和最小值。这样我们就把寻找矩阵的奇异值分解过程缩小到了优化函数|Mx|上了。结果发现(具体的推到过程这里就不详细介绍了)这个函数取得最优值的向量分别是矩阵 MT M 的特征向量。由于MTM是对称矩阵,因此不同特征值对应的特征向量都是互相正交的,我们用vi 表示MTM的所有特征向量。奇异值σi = |Mvi| , 向量 ui 为 Mvi 方向上的单位向量。但为什么ui也是正交的呢?
推倒如下:
σi 和 σj分别是不同两个奇异值
Mvi = σiui
Mvj = σjuj.
我们先看下MviMvj,并假设它们分别对应的奇异值都不为零。一方面这个表达的值为0,推到如下
Mvi Mvj = viTMT Mvj = vi MTMvj = λjvi vj = 0
另一方面,我们有
Mvi Mvj = σiσj ui uj = 0
因此,ui 和 uj是正交的。但实际上,这并非是求解奇异值的方法,效率会非常低。这里也主要不是讨论如何求解奇异值,为了演示方便,采用的都是二阶矩阵。
应用实例(Another example)
现在我们来看几个实例。
实例一

经过这个矩阵变换后的效果如下图所示

在这个例子中,第二个奇异值为 0,因此经过变换后只有一个方向上有表达。
M = u1σ1 v1T.
换句话说,如果某些奇异值非常小的话,其相对应的几项就可以不同出现在矩阵 M 的分解式中。因此,我们可以看到矩阵 M 的秩的大小等于非零奇异值的个数。
实例二
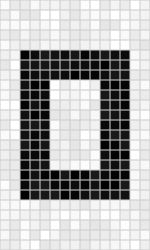
我们来看一个奇异值分解在数据表达上的应用。假设我们有如下的一张 15 x 25 的图像数据。
如图所示,该图像主要由下面三部分构成。

我们将图像表示成 15 x 25 的矩阵,矩阵的元素对应着图像的不同像素,如果像素是白色的话,就取 1,黑色的就取 0. 我们得到了一个具有375个元素的矩阵,如下图所示

如果我们对矩阵M进行奇异值分解以后,得到奇异值分别是
σ1 = 14.72
σ2 = 5.22
σ3 = 3.31
矩阵M就可以表示成
M=u1σ1 v1T + u2σ2 v2T + u3σ3 v3T
vi具有15个元素,ui 具有25个元素,σi 对应不同的奇异值。如上图所示,我们就可以用123个元素来表示具有375个元素的图像数据了。
实例三
减噪(noise reduction)
前面的例子的奇异值都不为零,或者都还算比较大,下面我们来探索一下拥有零或者非常小的奇异值的情况。通常来讲,大的奇异值对应的部分会包含更多的信息。比如,我们有一张扫描的,带有噪声的图像,如下图所示
我们采用跟实例二相同的处理方式处理该扫描图像。得到图像矩阵的奇异值:
σ1 = 14.15
σ2 = 4.67
σ3 = 3.00
σ4 = 0.21
σ5 = 0.19
...
σ15 = 0.05
很明显,前面三个奇异值远远比后面的奇异值要大,这样矩阵 M 的分解方式就可以如下:
M  u1σ1 v1T + u2σ2 v2T + u3σ3 v3T
u1σ1 v1T + u2σ2 v2T + u3σ3 v3T
经过奇异值分解后,我们得到了一张降噪后的图像。

实例四
数据分析(data analysis)
我们搜集的数据中总是存在噪声:无论采用的设备多精密,方法有多好,总是会存在一些误差的。如果你们还记得上文提到的,大的奇异值对应了矩阵中的主要信息的话,运用SVD进行数据分析,提取其中的主要部分的话,还是相当合理的。
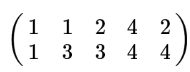
作为例子,假如我们搜集的数据如下所示:

我们将数据用矩阵的形式表示:

经过奇异值分解后,得到
σ1 = 6.04
σ2 = 0.22
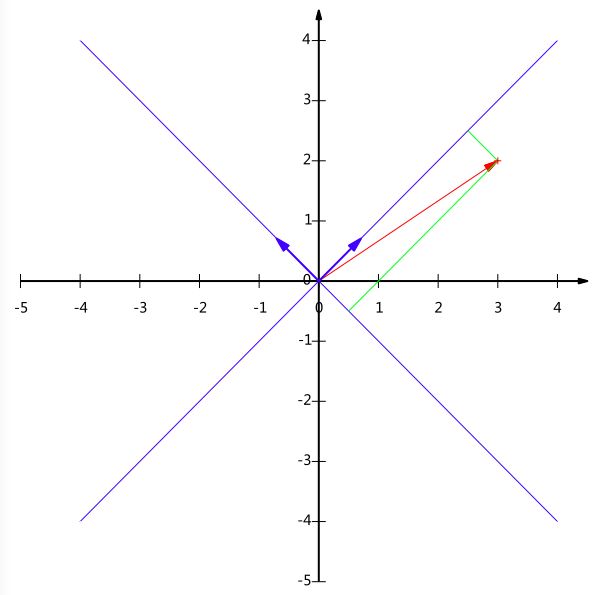
由于第一个奇异值远比第二个要大,数据中有包含一些噪声,第二个奇异值在原始矩阵分解相对应的部分可以忽略。经过SVD分解后,保留了主要样本点如图所示

就保留主要样本数据来看,该过程跟PCA( principal component analysis)技术有一些联系,PCA也使用了SVD去检测数据间依赖和冗余信息.
总结(Summary)
这篇文章非常的清晰的讲解了SVD的几何意义,不仅从数学的角度,还联系了几个应用实例形象的论述了SVD是如何发现数据中主要信息的。在netflix prize中许多团队都运用了矩阵分解的技术,该技术就来源于SVD的分解思想,矩阵分解算是SVD的变形,但思想还是一致的。之前算是能够运用矩阵分解技术于个性化推荐系统中,但理解起来不够直观,阅读原文后醍醐灌顶,我想就从SVD能够发现数据中的主要信息的思路,就几个方面去思考下如何利用数据中所蕴含的潜在关系去探索个性化推荐系统。也希望路过的各位大侠不吝分享呀。
References:
Gilbert Strang, Linear Algebra and Its Applications. Brooks Cole
William H. Press et al, Numercial Recipes in C: The Art of Scientific Computing. Cambridge University Press.
Dan Kalman, A Singularly Valuable Decomposition: The SVD of a Matrix, The College Mathematics Journal 27 (1996), 2-23.
If You Liked This, You're Sure to Love That, The New York Times, November 21, 2008.
(三)、与PCA的关系
将一个m * n的矩阵A的进行坐标轴的变化,P是变换矩阵,把一个m×n维的空间变换到另一个m×n维的空间,在空间中就会进行一些类似于旋转、拉伸的变化。
如果降低特征空间维度,只提取r个特征,那么就是:
这就是PCA,如果要详细了解PCA原理,请阅读本头条号另一篇非常易懂PCA的文章《深度剖析:Eigenfaces算法原理及其中PCA几何意义(人脸系列一)》
跟PCA一样,SVD也是按照奇异值由大到小排列的,方差最大的坐标轴是第一个奇异向量,以此类推, SVD表达式:
在矩阵的两边同时乘上一个矩阵V,由于V是一个正交的矩阵,所以V转置乘以V得到单位阵I,所以可以化成后面的式子:
对比变换,这里是将一个m * n 的矩阵压缩到一个m * r的矩阵,也就是对列进行压缩。
同样我们写出一个通用的行压缩例子:
这样就从一个m行的矩阵压缩到一个r行的矩阵了,对SVD来说也是一样的,我们对SVD分解的式子两边乘以U的转置UT
注意上式,m×r后转置,符合矩阵相乘的左矩阵列数与右矩阵行数相等的要求。
综上,可见,PCA是SVD的一个特例,我们实现了SVD,那也就实现了PCA,或者说,我们可以得到两个方向的PCA,如果我们对ATA进行特征值的分解,只能得到一个方向的PCA。
总结如下:左奇异矩阵可以用于行数的压缩。右奇异矩阵可以用于列数即特征维度的压缩,也就是PCA降维。
二、矩阵特征值分解与奇异值分解含义解析及应用
转自:https://blog.csdn.net/xiahouzuoxin/article/details/41118351
特征值与特征向量的几何意义
矩阵的乘法是什么,别只告诉我只是“前一个矩阵的行乘以后一个矩阵的列”,还会一点的可能还会说“前一个矩阵的列数等于后一个矩阵的行数才能相乘”,然而,这里却会和你说——那都是表象。
矩阵乘法真正的含义是变换,我们学《线性代数》一开始就学行变换列变换,那才是线代的核心——别会了点猫腻就忘了本——对,矩阵乘法 就是线性变换,若以其中一个向量A为中心,则B的作用主要是使A发生如下变化:
1、伸缩
clf;
A = [0, 1, 1, 0, 0;...
1, 1, 0, 0, 1]; % 原空间
B = [3 0; 0 2]; % 线性变换矩阵
plot(A(1,:),A(2,:), '-*');hold on
grid on;axis([0 3 0 3]); gtext('变换前');
Y = B * A;
plot(Y(1,:),Y(2,:), '-r*');
grid on;axis([0 3 0 3]); gtext('变换后');
输出:
1
1
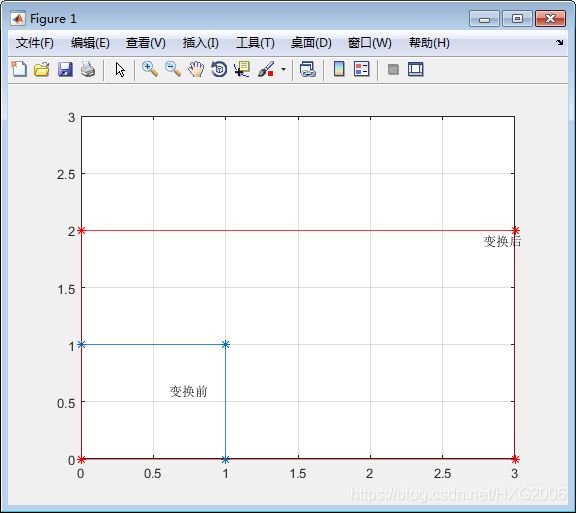
从上图可知,y方向进行了2倍的拉伸,x方向进行了3倍的拉伸,这就是B=[3 0; 0 2]的功劳,3和2就是伸缩比例。请注意,这时B除了对角线元素为各个维度的倍数外,非正对角线元素都为0,因为下面将要看到,对角线元素非0则将会发生切变及旋转的效果。
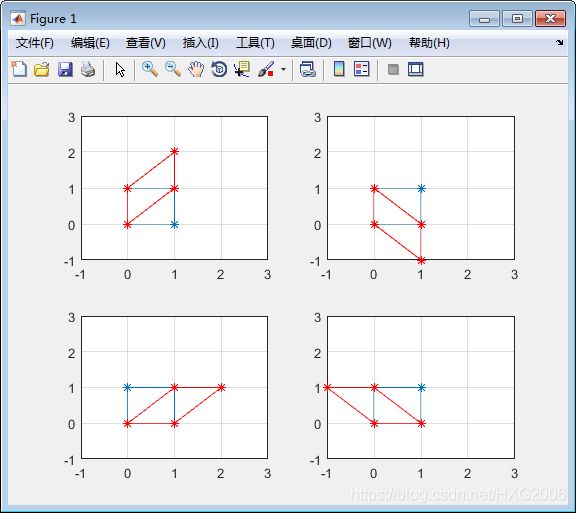
2、切变
从上图可知,y方向进行了2倍的拉伸,x方向进行了3倍的拉伸,这就是B=[3 0; 0 2]的功劳,3和2就是伸缩比例。请注意,这时B除了对角线元素为各个维度的倍数外,非正对角线元素都为0,因为下面将要看到,对角线元素非0则将会发生切变及旋转的效果。
clf;
A = [0, 1, 1, 0, 0;...
1, 1, 0, 0, 1]; % 原空间
B1 = [1 0; 1 1]; % 线性变换矩阵
B2 = [1 0; -1 1]; % 线性变换矩阵
B3 = [1 1; 0 1]; % 线性变换矩阵
B4 = [1 -1; 0 1]; % 线性变换矩阵
Y1 = B1 * A;
Y2 = B2 * A;
Y3 = B3 * A;
Y4 = B4 * A;
subplot(2,2,1);
plot(A(1,:),A(2,:), '-*'); hold on;plot(Y1(1,:),Y1(2,:), '-r*');
grid on;axis([-1 3 -1 3]);
subplot(2,2,2);
plot(A(1,:),A(2,:), '-*'); hold on;plot(Y2(1,:),Y2(2,:), '-r*');
grid on;axis([-1 3 -1 3]);
subplot(2,2,3);
plot(A(1,:),A(2,:), '-*'); hold on;plot(Y3(1,:),Y3(2,:), '-r*');
grid on;axis([-1 3 -1 3]);
subplot(2,2,4);
plot(A(1,:),A(2,:), '-*'); hold on;plot(Y4(1,:),Y4(2,:), '-r*');
grid on;axis([-1 3 -1 3]);
2
2
3、旋转
所有的变换其实都可以通过上面的伸缩和切变变换的到,如果合理地对变换矩阵B取值,能得到图形旋转的效果,如下,
clf;
A = [0, 1, 1, 0, 0;...
1, 1, 0, 0, 1]; % 原空间
theta = pi/6;
B = [cos(theta) sin(theta); -sin(theta) cos(theta)];
Y = B * A;
figure;
plot(A(1,:),A(2,:), '-*'); hold on;plot(Y(1,:),Y(2,:), '-r*');
grid on;axis([-1 3 -1 3]);
输出:
3
3

好,关于矩阵乘就这些了。那么,我们接着就进入主题了,对特定的向量,经过一种方阵变换,经过该变换后,向量的方向不变(或只是反向),而只是进行伸缩变化(伸缩值可以是负值,相当于向量的方向反向)?这个时候我们不妨将书上对特征向量的定义对照一遍:
数学教材定义: 设A是n阶方阵,如果存在 λ 和n维非零向量X,使  ,则 λ 称为方阵A的一个特征值,X为方阵A对应于或属于特征值 λ 的一个特征向量。
,则 λ 称为方阵A的一个特征值,X为方阵A对应于或属于特征值 λ 的一个特征向量。
上面特定的向量不就是特征向量吗? λ 不就是那个伸缩的倍数吗?因此,特征向量的代数上含义是:将矩阵乘法转换为数乘操作;特征向量的几何含义是:特征向量通过方阵A变换只进行伸缩,而保持特征向量的方向不变。特征值表示的是这个特征到底有多重要,类似于权重,而特征向量在几何上就是一个点,从原点到该点的方向表示向量的方向。
特征向量有一个重要的性质:同一特征值的任意多个特征向量的线性组合仍然是A属于同一特征值的特征向量。关于特征值,网上有一段关于“特征值是震动的谱”的解释:
戏说在朝代宋的时候,我国就与发现矩阵特征值理论的机会擦肩而过。话说没有出息的秦少游在往池塘里扔了一颗小石头后,刚得到一句“投石冲开水底天”的泡妞诗对之后,就猴急猴急地去洞房了,全然没有想到水波中隐含着矩阵的特征值及特征向量的科学大道理。大概地说,水面附近的任一点水珠在原处上下振动(实际上在做近似圆周运动),并没有随着波浪向外圈移动,同时这些上下振动的水珠的幅度在渐渐变小,直至趋于平静。在由某块有着特定质量和形状的石头被以某种角度和速度投入某个面积和深度特定的水池中所决定的某个矩阵中,纹波荡漾中水珠的渐变过程中其特征值起着决定性的作用,它决定着水珠振动的频率和幅度减弱的衰退率。
在理解关于振动的特征值和特征向量的过程中,需要加入复向量和复矩阵的概念,因为在实际应用中,实向量和实矩阵是干不了多少事的。机械振动和电振动有频谱,振动的某个频率具有某个幅度;那么矩阵也有矩阵的谱,矩阵的谱就是矩阵特征值的概念,是矩阵所固有的特性,所有的特征值形成了矩阵的一个频谱,每个特征值是矩阵的一个“谐振频点”。
美国数学家斯特让(G..Strang)在其经典教材《线性代数及其应用》中这样介绍了特征值作为频率的物理意义,他说:
大概最简单的例子(我从不相信其真实性,虽然据说1831年有一桥梁毁于此因)是一对士兵通过桥梁的例子。传统上,他们要停止齐步前进而要散步通过。这个理由是因为他们可能以等于桥的特征值之一的频率齐步行进,从而将发生共振。就像孩子的秋千那样,你一旦注意到一个秋千的频率,和此频率相配,你就使频率荡得更高。一个工程师总是试图使他的桥梁或他的火箭的自然频率远离风的频率或液体燃料的频率;而在另一种极端情况,一个证券经纪人则尽毕生精力于努力到达市场的自然频率线。特征值是几乎任何一个动力系统的最重要的特征。
其实,这个矩阵之所以能形成“频率的谱”,就是因为矩阵在特征向量所指的方向上具有对向量产生恒定的变换作用:增强(或减弱)特征向量的作用。进一步的,如果矩阵持续地叠代作用于向量,那么特征向量的就会凸现出来。
三、奇异值分解
特征值分解是一个提取矩阵特征很不错的方法,但是它只适用于方阵。而在现实的世界中,我们看到的大部分矩阵都不是方阵,比如说有M个学生,每个学生有N科成绩,这样形成的一个M * N的矩阵就可能不是方阵,我们怎样才能像描述特征值一样描述这样一般矩阵呢的重要特征呢?奇异值分解就是用来干这个事的,奇异值分解是一个能适用于任意的矩阵的一种分解的方法。我们有必要先说说特征值和奇异值之间的关系。
对于特征值分解公式, ATA 是方阵,我们求 ATA 的特征值,即 ,此时求得的特征值就对应奇异值的平方,求得的特征向量v称为右奇异向量,另外还可以得到:
所求的ui就是左奇异向量, σi 就是奇异值。已有人对SVD的几何机理做了清晰的分析,非常受用,就不重复造轮子,下文为转载自http://blog.sciencenet.cn/blog-696950-699432.html 。
PS:一直以来对SVD分解似懂非懂,此文为译文,原文以细致的分析+大量的可视化图形演示了SVD的几何意义。能在有限的篇幅把这个问题讲解的如此清晰,实属不易。原文举了一个简单的图像处理问题,简单形象,真心希望路过的各路朋友能从不同的角度阐述下自己对SVD实际意义的理解,比如 个性化推荐中应用了SVD,文本以及Web挖掘的时候也经常会用到SVD。
简介
SVD实际上是数学专业内容,但它现在已经渗入到不同的领域中。SVD的过程不是很好理解,因为它不够直观,但它对矩阵分解的效果却非常好。比如,Netflix(一个提供在线电影租赁的公司)曾经就悬赏100万美金,如果谁能提高它的电影推荐系统评分预测准确率提高10%的话。令人惊讶的是,这个目标充满了挑战,来自世界各地的团队运用了各种不同的技术。最终的获胜队伍"BellKor's Pragmatic Chaos"采用的核心算法就是基于SVD。
SVD提供了一种非常便捷的矩阵分解方式,能够发现数据中十分有意思的潜在模式。在这篇文章中,我们将会提供对SVD几何上的理解和一些简单的应用实例。
线性变换的几何意义(The geometry of linear transformations)
让我们来看一些简单的线性变换例子,以 2 X 2 的线性变换矩阵为例,首先来看一个较为特殊的,对角矩阵:
一前言
特征值
奇异值
二奇异值计算
三PCA
1)数据的向量表示及降维问题
2)向量的表示及基变换
3)基向量
4)协方差矩阵及优化目标
5)方差
6)协方差
7)协方差矩阵
8)协方差矩阵对角划
一前言:
PCA的实现一般有两种:
一种是用特征值分解去实现的,一种是用奇异值分解去实现的。
特征值分解和奇异值分解的目的都是一样,就是提取出一个矩阵最重要的特征。
奇异值分解是一个有着很明显的物理意义的一种方法:
它可以将一个比较复杂的矩阵用更小更简单的几个子矩阵的相乘来表示,这些小矩阵描述的是矩阵的重要的特性。
就像是描述一个人一样,给别人描述说这个人长得浓眉大眼,方脸,络腮胡,而且带个黑框的眼镜,这样寥寥的几个特征,就让别人脑海里面就有一个较为清楚的认识,实际上,人脸上的特征是有着无数种的,之所以能这么描述,是因为人天生就有着非常好的抽取重要特征的能力,让机器学会抽取重要的特征,SVD是一个重要的方法。
特征值:
如果说一个向量v是方阵A的特征向量,将一定可以表示成下面的形式:
![]()
这时候λ就被称为特征值v对应的特征向量,一个矩阵的一组特征向量是一组正交向量。特征值分解是将一个矩阵分解成下面的形式:
![]()
其中Q是这个矩阵A的特征向量组成的矩阵,Σ是一个对角阵,每一个对角线上的元素就是一个特征值。
一个矩阵其实就是一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。
比如说下面的一个矩阵:

它其实对应的线性变换是下面的形式:
因为这个矩阵M乘以一个向量(x,y)的结果是:

上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:
它所描述的变换是下面的样子:

这其实是在平面上对一个轴进行的拉伸变换(如蓝色的箭头所示)。
在图中,蓝色的箭头是一个最主要的变化方向(变化方向可能有不止一个),如果我们想要描述好一个变换,那我们就描述好这个变换主要的变化方向就好了。
反过头来看看之前特征值分解的式子,分解得到的Σ矩阵是一个对角阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变化方向(从主要的变化到次要的变化排列)
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。
也就是之前说的:提取这个矩阵最重要的特征。总结一下,特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
奇异值:
下面谈谈奇异值分解。特征值分解是一个提取矩阵特征很不错的方法,但是它只是对方阵而言的,在现实的世界中,我们看到的大部分矩阵都不是方阵,比如说有N个学生,每个学生有M科成绩,这样形成的一个N * M的矩阵就不可能是方阵,我们怎样才能描述这样普通的矩阵呢的重要特征呢?奇异值分解可以用来干这个事情。
奇异值分解是一个能适用于任意的矩阵的一种分解的方法:
假设A是一个N * M的矩阵,那么得到的U是一个M * M的方阵(里面的向量是正交的,U里面的向量称为左奇异向量),Σ是一个N * M的矩阵(除了对角线的元素都是0,对角线上的元素称为奇异值),V’(V的转置)是一个N * N的矩阵,里面的向量也是正交的,V里面的向量称为右奇异向量),从图片来反映几个相乘的矩阵的大小可得下面的图片


那么奇异值和特征值是怎么对应起来的呢?首先,我们将一个矩阵A的转置 * A,将会得到一个方阵,我们用这个方阵求特征值可以得到:
![]()
这里得到的v,就是我们上面的右奇异向量。此外我们还可以得到:

这里的σ就是上面说的奇异值,u就是上面说的左奇异向量。
奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。
也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:
![]()
r是一个远小于m、n的数,这样矩阵的乘法看起来像是下面的样子:

右边的三个矩阵相乘的结果将会是一个接近于A的矩阵,在这儿,r越接近于n,则相乘的结果越接近于A。而这三个矩阵的面积之和(在存储观点来说,矩阵面积越小,存储量就越小)要远远小于原始的矩阵A,我们如果想要压缩空间来表示原矩阵A,我们存下这里的三个矩阵:U、Σ、V就好了。
二、奇异值的计算:
奇异值的计算是一个难题,是一个O(N^3)的算法。在单机的情况下当然是没问题的,matlab在一秒钟内就可以算出1000 * 1000的矩阵的所有奇异值,但是当矩阵的规模增长的时候,计算的复杂度呈3次方增长,就需要并行计算参与了。Google的吴军老师在数学之美系列谈到SVD的时候,说起Google实现了SVD的并行化算法,说这是对人类的一个贡献,但是也没有给出具体的计算规模,也没有给出太多有价值的信息。
其实SVD还是可以用并行的方式去实现的,在解大规模的矩阵的时候,一般使用迭代的方法,当矩阵的规模很大(比如说上亿)的时候,迭代的次数也可能会上亿次,如果使用Map-Reduce框架去解,则每次Map-Reduce完成的时候,都会涉及到写文件、读文件的操作。个人猜测Google云计算体系中除了Map-Reduce以外应该还有类似于MPI的计算模型,也就是节点之间是保持通信,数据是常驻在内存中的,这种计算模型比Map-Reduce在解决迭代次数非常多的时候,要快了很多倍。
Lanczos迭代就是一种解对称方阵部分特征值的方法(之前谈到了,解A’* A得到的对称方阵的特征值就是解A的右奇异向量),是将一个对称的方程化为一个三对角矩阵再进行求解。按网上的一些文献来看,Google应该是用这种方法去做的奇异值分解的。请见Wikipedia上面的一些引用的论文,如果理解了那些论文,也“几乎”可以做出一个SVD了。
由于奇异值的计算是一个很枯燥,纯数学的过程,而且前人的研究成果(论文中)几乎已经把整个程序的流程图给出来了。更多的关于奇异值计算的部分,将在后面的参考文献中给出,这里不再深入,我还是focus在奇异值的应用中去。
三、PCA
PCA(Principal Component Analysis)是一种常用的数据分析方法。PCA通过线性变换将原始数据变换为一组各维度线性无关的表示,可用于提取数据的主要特征分量,常用于高维数据的降维。网上关于PCA的文章有很多,但是大多数只描述了PCA的分析过程,而没有讲述其中的原理。这篇文章的目的是介绍PCA的基本数学原理,帮助读者了解PCA的工作机制是什么。
1)数据的向量表示及降维问题
一般情况下,在数据挖掘和机器学习中,数据被表示为向量。例如某个淘宝店2012年全年的流量及交易情况可以看成一组记录的集合,其中每一天的数据是一条记录,格式如下:
(日期, 浏览量, 访客数, 下单数, 成交数, 成交金额)
其中“日期”是一个记录标志而非度量值,而数据挖掘关心的大多是度量值,因此如果我们忽略日期这个字段后,我们得到一组记录,每条记录可以被表示为一个五维向量,其中一条看起来大约是这个样子:
![]()
注意这里我用了转置,因为习惯上使用列向量表示一条记录(后面会看到原因),本文后面也会遵循这个准则。不过为了方便有时我会省略转置符号,但我们说到向量默认都是指列向量。
我们当然可以对这一组五维向量进行分析和挖掘,不过我们知道,很多机器学习算法的复杂度和数据的维数有着密切关系,甚至与维数呈指数级关联。当然,这里区区五维的数据,也许还无所谓,但是实际机器学习中处理成千上万甚至几十万维的情况也并不罕见,在这种情况下,机器学习的资源消耗是不可接受的,因此我们必须对数据进行降维。
降维当然意味着信息的丢失,不过鉴于实际数据本身常常存在的相关性,我们可以想办法在降维的同时将信息的损失尽量降低。
举个例子,假如某学籍数据有两列M和F,其中M列的取值是如何此学生为男性取值1,为女性取值0;而F列是学生为女性取值1,男性取值0。此时如果我们统计全部学籍数据,会发现对于任何一条记录来说,当M为1时F必定为0,反之当M为0时F必定为1。在这种情况下,我们将M或F去掉实际上没有任何信息的损失,因为只要保留一列就可以完全还原另一列。
当然上面是一个极端的情况,在现实中也许不会出现,不过类似的情况还是很常见的。例如上面淘宝店铺的数据,从经验我们可以知道,“浏览量”和“访客数”往往具有较强的相关关系,而“下单数”和“成交数”也具有较强的相关关系。这里我们非正式的使用“相关关系”这个词,可以直观理解为“当某一天这个店铺的浏览量较高(或较低)时,我们应该很大程度上认为这天的访客数也较高(或较低)”。后面的章节中我们会给出相关性的严格数学定义。
这种情况表明,如果我们删除浏览量或访客数其中一个指标,我们应该期待并不会丢失太多信息。因此我们可以删除一个,以降低机器学习算法的复杂度。
上面给出的是降维的朴素思想描述,可以有助于直观理解降维的动机和可行性,但并不具有操作指导意义。例如,我们到底删除哪一列损失的信息才最小?亦或根本不是单纯删除几列,而是通过某些变换将原始数据变为更少的列但又使得丢失的信息最小?到底如何度量丢失信息的多少?如何根据原始数据决定具体的降维操作步骤?
要回答上面的问题,就要对降维问题进行数学化和形式化的讨论。而PCA是一种具有严格数学基础并且已被广泛采用的降维方法。下面我不会直接描述PCA,而是通过逐步分析问题,让我们一起重新“发明”一遍PCA。
2)向量的表示及基变换
既然我们面对的数据被抽象为一组向量,那么下面有必要研究一些向量的数学性质。而这些数学性质将成为后续导出PCA的理论基础。
内积与投影
下面先来看一个高中就学过的向量运算:
内积。两个维数相同的向量的内积被定义为:
![]()
内积运算将两个向量映射为一个实数。其计算方式非常容易理解,但是其意义并不明显。下面我们分析内积的几何意义。假设A和B是两个n维向量,我们知道n维向量可以等价表示为n维空间中的一条从原点发射的有向线段,为了简单起见我们假设A和B均为二维向量,则
![]()
则在二维平面上A和B可以用两条发自原点的有向线段表示,见下图:

好,现在我们从A点向B所在直线引一条垂线。我们知道垂线与B的交点叫做A在B上的投影,再设A与B的夹角是a,则投影的矢量长度为:
![]()
其中,向量A的模,也就是A线段的标量长度为:
![]()
注意这里我们专门区分了矢量长度和标量长度,标量长度总是大于等于0,值就是线段的长度;而矢量长度可能为负,其绝对值是线段长度,而符号取决于其方向与标准方向相同或相反。
到这里还是看不出内积和这东西有什么关系,不过如果我们将内积表示为另一种我们熟悉的形式:
![]()
现在事情似乎是有点眉目了:A与B的内积等于A到B的投影长度乘以B的模。再进一步,如果我们假设B的模为1,
![]()
也就是说,设向量B的模为1,则A与B的内积值等于A向B所在直线投影的矢量长度!这就是内积的一种几何解释,也是我们得到的第一个重要结论。在后面的推导中,将反复使用这个结论。
3)基
下面我们继续在二维空间内讨论向量。上文说过,一个二维向量可以对应二维笛卡尔直角坐标系中从原点出发的一个有向线段。例如下面这个向量:
在代数表示方面,我们经常用线段终点的点坐标表示向量,例如上面的向量可以表示为(3,2),这是我们再熟悉不过的向量表示。
不过我们常常忽略,只有一个(3,2)本身是不能够精确表示一个向量的。我们仔细看一下,这里的3实际表示的是向量在x轴上的投影值是3,在y轴上的投影值是2。也就是说我们其实隐式引入了一个定义:以x轴和y轴上正方向长度为1的向量为标准。那么一个向量(3,2)实际是说在x轴投影为3而y轴的投影为2。注意投影是一个矢量,所以可以为负。
更正式的说,向量(x,y)实际上表示线性组合:
![]()
不难证明所有二维向量都可以表示为这样的线性组合。此处(1,0)和(0,1)叫做二维空间中的一组基。

所以,要准确描述向量,首先要确定一组基,然后给出在基所在的各个直线上的投影值,就可以了。只不过我们经常省略第一步,而默认以(1,0)和(0,1)为基。
我们之所以默认选择(1,0)和(0,1)为基,当然是比较方便,因为它们分别是x和y轴正方向上的单位向量,因此就使得二维平面上点坐标和向量一一对应,非常方便。但实际上任何两个线性无关的二维向量都可以成为一组基,所谓线性无关在二维平面内可以直观认为是两个不在一条直线上的向量。
例如,(1,1)和(-1,1)也可以成为一组基。一般来说,我们希望基的模是1,因为从内积的意义可以看到,如果基的模是1,那么就可以方便的用向量点乘基而直接获得其在新基上的坐标了!实际上,对应任何一个向量我们总可以找到其同方向上模为1的向量,只要让两个分量分别除以模就好了。
![]()
现在,我们想获得(3,2)在新基上的坐标,即在两个方向上的投影矢量值,那么根据内积的几何意义,我们只要分别计算(3,2)和两个基的内积,不难得到新的坐标为
![]()
下图给出了新的基以及(3,2)在新基上坐标值的示意图:
另外这里要注意的是,我们列举的例子中基是正交的(即内积为0,或直观说相互垂直),但可以成为一组基的唯一要求就是线性无关,非正交的基也是可以的。不过因为正交基有较好的性质,所以一般使用的基都是正交的。
4)基变换的矩阵表示
下面我们找一种简便的方式来表示基变换。还是拿上面的例子,想一下,将(3,2)变换为新基上的坐标,就是用(3,2)与第一个基做内积运算,作为第一个新的坐标分量,然后用(3,2)与第二个基做内积运算,作为第二个新坐标的分量。实际上,我们可以用矩阵相乘的形式简洁的表示这个变换:

太漂亮了!其中矩阵的两行分别为两个基,乘以原向量,其结果刚好为新基的坐标。可以稍微推广一下,如果我们有m个二维向量,只要将二维向量按列排成一个两行m列矩阵,然后用“基矩阵”乘以这个矩阵,就得到了所有这些向量在新基下的值。例如(1,1),(2,2),(3,3),想变换到刚才那组基上,则可以这样表示:

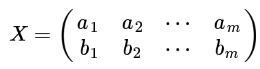
一般的,如果我们有M个N维向量,想将其变换为由R个N维向量表示的新空间中,那么首先将R个基按行组成矩阵A,然后将向量按列组成矩阵B,那么两矩阵的乘积AB就是变换结果,其中AB的第m列为A中第m列变换后的结果。
数学表示为:

其中Pi是一个行向量,表示第i个基,aj是一个列向量,表示第j个原始数据记录。
特别要注意的是,这里R可以小于N,而R决定了变换后数据的维数。也就是说,我们可以将一N维数据变换到更低维度的空间中去,变换后的维度取决于基的数量。因此这种矩阵相乘的表示也可以表示降维变换。
最后,上述分析同时给矩阵相乘找到了一种物理解释:
两个矩阵相乘的意义是将右边矩阵中的每一列列向量变换到左边矩阵中每一行行向量为基所表示的空间中去。
更抽象的说,一个矩阵可以表示一种线性变换。很多同学在学线性代数时对矩阵相乘的方法感到奇怪,但是如果明白了矩阵相乘的物理意义,其合理性就一目了然了。
4)协方差矩阵及优化目标
上面我们讨论了选择不同的基可以对同样一组数据给出不同的表示,而且如果基的数量少于向量本身的维数,则可以达到降维的效果。
但是我们还没有回答一个最最关键的问题:
如何选择基才是最优的。或者说,如果我们有一组N维向量,现在要将其降到K维(K小于N),那么我们应该如何选择K个基才能最大程度保留原有的信息?
要完全数学化这个问题非常繁杂,这里我们用一种非形式化的直观方法来看这个问题。
为了避免过于抽象的讨论,我们仍以一个具体的例子展开。假设我们的数据由五条记录组成,将它们表示成矩阵形式:
其中每一列为一条数据记录,而一行为一个字段。为了后续处理方便,我们首先将每个字段内所有值都减去字段均值,其结果是将每个字段都变为均值为0(这样做的道理和好处后面会看到)。
我们看上面的数据,第一个字段均值为2,第二个字段均值为3,所以变换后:

我们可以看下五条数据在平面直角坐标系内的样子:

现在问题来了:如果我们必须使用一维来表示这些数据,又希望尽量保留原始的信息,你要如何选择?
通过上一节对基变换的讨论我们知道,这个问题实际上是要在二维平面中选择一个方向,将所有数据都投影到这个方向所在直线上,用投影值表示原始记录。这是一个实际的二维降到一维的问题。
那么如何选择这个方向(或者说基)才能尽量保留最多的原始信息呢?一种直观的看法是:
希望投影后的投影值尽可能分散。
以上图为例,可以看出如果向x轴投影,那么最左边的两个点会重叠在一起,中间的两个点也会重叠在一起,于是本身四个各不相同的二维点投影后只剩下两个不同的值了,这是一种严重的信息丢失,同理,如果向y轴投影最上面的两个点和分布在x轴上的两个点也会重叠。所以看来x和y轴都不是最好的投影选择。我们直观目测,如果向通过第一象限和第三象限的斜线投影,则五个点在投影后还是可以区分的。
下面,我们用数学方法表述这个问题。
5)方差
上文说到,我们希望投影后投影值尽可能分散,而这种分散程度,可以用数学上的方差来表述。此处,一个字段的方差可以看做是每个元素与字段均值的差的平方和的均值,即:
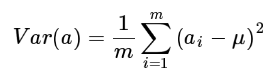
由于上面我们已经将每个字段的均值都化为0了,因此方差可以直接用每个元素的平方和除以元素个数表示:

于是上面的问题被形式化表述为:
寻找一个一维基,使得所有数据变换为这个基上的坐标表示后,方差值最大。
6)协方差
对于上面二维降成一维的问题来说,找到那个使得方差最大的方向就可以了。不过对于更高维,还有一个问题需要解决。考虑三维降到二维问题。与之前相同,首先我们希望找到一个方向使得投影后方差最大,这样就完成了第一个方向的选择,继而我们选择第二个投影方向。
如果我们还是单纯只选择方差最大的方向,很明显,这个方向与第一个方向应该是“几乎重合在一起”,显然这样的维度是没有用的,因此,应该有其他约束条件。从直观上说,让两个字段尽可能表示更多的原始信息,我们是不希望它们之间存在(线性)相关性的,因为相关性意味着两个字段不是完全独立,必然存在重复表示的信息。
数学上可以用两个字段的协方差表示其相关性,由于已经让每个字段均值为0,则:

可以看到,在字段均值为0的情况下,两个字段的协方差简洁的表示为其内积除以元素数m。
当协方差为0时,表示两个字段完全独立。为了让协方差为0,我们选择第二个基时只能在与第一个基正交的方向上选择。因此最终选择的两个方向一定是正交的。
至此,我们得到了降维问题的优化目标:
将一组N维向量降为K维(K大于0,小于N),其目标是选择K个单位(模为1)正交基,使得原始数据变换到这组基上后,各字段两两间协方差为0,而字段的方差则尽可能大(在正交的约束下,取最大的K个方差)。
7)协方差矩阵
上面我们导出了优化目标,但是这个目标似乎不能直接作为操作指南(或者说算法),因为它只说要什么,但根本没有说怎么做。所以我们要继续在数学上研究计算方案。
我们看到,最终要达到的目的与字段内方差及字段间协方差有密切关系。因此我们希望能将两者统一表示,仔细观察发现,两者均可以表示为内积的形式,而内积又与矩阵相乘密切相关。于是我们来了灵感:
假设我们只有a和b两个字段,那么我们将它们按行组成矩阵X:
然后我们用X乘以X的转置,并乘上系数1/m:

奇迹出现了!
这个矩阵对角线上的两个元素分别是两个字段的方差,而其它元素是a和b的协方差。两者被统一到了一个矩阵的。
根据矩阵相乘的运算法则,这个结论很容易被推广到一般情况
设我们有m个n维数据记录,将其按列排成n乘m的矩阵X,设
![]()
则C是一个对称矩阵,其对角线分别个各个字段的方差,而第i行j列和j行i列元素相同,表示i和j两个字段的协方差。
7)协方差矩阵对角化
根据上述推导,我们发现要达到优化目前,等价于将协方差矩阵对角化:即除对角线外的其它元素化为0,并且在对角线上将元素按大小从上到下排列,这样我们就达到了优化目的。这样说可能还不是很明晰,我们进一步看下原矩阵与基变换后矩阵协方差矩阵的关系:
设原始数据矩阵X对应的协方差矩阵为C,而P是一组基按行组成的矩阵,设Y=PX,则Y为X对P做基变换后的数据。设Y的协方差矩阵为D,我们推导一下D与C的关系:

现在事情很明白了!我们要找的P不是别的,而是能让原始协方差矩阵对角化的P。换句话说,优化目标变成了寻找一个矩阵P,满足
![]()
是一个对角矩阵,并且对角元素按从大到小依次排列,那么P的前K行就是要寻找的基,用P的前K行组成的矩阵乘以X就使得X从N维降到了K维并满足上述优化条件。
至此,我们离“发明”PCA还有仅一步之遥!
现在所有焦点都聚焦在了协方差矩阵对角化问题上,有时,我们真应该感谢数学家的先行,因为矩阵对角化在线性代数领域已经属于被玩烂了的东西,所以这在数学上根本不是问题。
由上文知道,协方差矩阵C是一个是对称矩阵,在线性代数上,实对称矩阵有一系列非常好的性质:1)实对称矩阵不同特征值对应的特征向量必然正交。
2)设特征向量重数为r,则必然存在r个线性无关的特征向量对应于,因此可以将这r个特征向量单位正交化。
由上面两条可知,一个n行n列的实对称矩阵一定可以找到n个单位正交特征向量,设这n个特征向量为,
![]()
我们将其按列组成矩阵:
则对协方差矩阵C有如下结论:

其中
![]()
为对角矩阵,其对角元素为各特征向量对应的特征值(可能有重复)。
以上结论不再给出严格的数学证明,对证明感兴趣的朋友可以参考线性代数书籍关于“实对称矩阵对角化”的内容。
到这里,我们发现我们已经找到了需要的矩阵P:
![]()
P是协方差矩阵的特征向量单位化后按行排列出的矩阵,其中每一行都是C的一个特征向量。如果设P按照
![]()
中特征值的从大到小,将特征向量从上到下排列,则用P的前K行组成的矩阵乘以原始数据矩阵X,就得到了我们需要的降维后的数据矩阵Y。至此我们完成了整个PCA的数学原理讨论。在下面的一节,我们将给出PCA的一个实例。
8)算法及实例
为了巩固上面的理论,我们在这一节给出一个具体的PCA实例。

实例
这里以上文提到的

为例,我们用PCA方法将这组二维数据其降到一维。
因为这个矩阵的每行已经是零均值,这里我们直接求协方差矩阵:
然后求其特征值和特征向量,具体求解方法不再详述,可以参考相关资料。求解后特征值为:
![]()
其对应的特征向量分别是:
其中对应的特征向量分别是一个通解,C1和C2可取任意实数。那么标准化后的特征向量为:

因此我们的矩阵P是:

可以验证协方差矩阵C的对角化:

最后我们用P的第一行乘以数据矩阵,就得到了降维后的表示:

降维投影结果如下图:

9)进一步讨论
根据上面对PCA的数学原理的解释,我们可以了解到一些PCA的能力和限制。PCA本质上是将方差最大的方向作为主要特征,并且在各个正交方向上将数据“离相关”,也就是让它们在不同正交方向上没有相关性。
因此,PCA也存在一些限制,例如它可以很好的解除线性相关,但是对于高阶相关性就没有办法了,对于存在高阶相关性的数据,可以考虑Kernel PCA,通过Kernel函数将非线性相关转为线性相关,关于这点就不展开讨论了。另外,PCA假设数据各主特征是分布在正交方向上,如果在非正交方向上存在几个方差较大的方向,PCA的效果就大打折扣了。
最后需要说明的是,PCA是一种无参数技术,也就是说面对同样的数据,如果不考虑清洗,谁来做结果都一样,没有主观参数的介入,所以PCA便于通用实现,但是本身无法个性化的优化。
希望这篇文章能帮助朋友们了解PCA的数学理论基础和实现原理,借此了解PCA的适用场景和限制,从而更好的使用这个算法。
四、奇异值与主成分分析(PCA):
主成分分析在上一节里面也讲了一些,这里主要谈谈如何用SVD去解PCA的问题。PCA的问题其实是一个基的变换,使得变换后的数据有着最大的方差。方差的大小描述的是一个变量的信息量,我们在讲一个东西的稳定性的时候,往往说要减小方差,如果一个模型的方差很大,那就说明模型不稳定了。但是对于我们用于机器学习的数据(主要是训练数据),方差大才有意义,不然输入的数据都是同一个点,那方差就为0了,这样输入的多个数据就等同于一个数据了。以下面这张图为例子:
这个假设是一个摄像机采集一个物体运动得到的图片,上面的点表示物体运动的位置,假如我们想要用一条直线去拟合这些点,那我们会选择什么方向的线呢?当然是图上标有signal的那条线。如果我们把这些点单纯的投影到x轴或者y轴上,最后在x轴与y轴上得到的方差是相似的(因为这些点的趋势是在45度左右的方向,所以投影到x轴或者y轴上都是类似的),如果我们使用原来的xy坐标系去看这些点,容易看不出来这些点真正的方向是什么。但是如果我们进行坐标系的变化,横轴变成了signal的方向,纵轴变成了noise的方向,则就很容易发现什么方向的方差大,什么方向的方差小了。

一般来说,方差大的方向是信号的方向,方差小的方向是噪声的方向,我们在数据挖掘中或者数字信号处理中,往往要提高信号与噪声的比例,也就是信噪比。对上图来说,如果我们只保留signal方向的数据,也可以对原数据进行不错的近似了。
PCA的全部工作简单点说,就是对原始的空间中顺序地找一组相互正交的坐标轴,第一个轴是使得方差最大的,第二个轴是在与第一个轴正交的平面中使得方差最大的,第三个轴是在与第1、2个轴正交的平面中方差最大的,这样假设在N维空间中,我们可以找到N个这样的坐标轴,我们取前r个去近似这个空间,这样就从一个N维的空间压缩到r维的空间了,但是我们选择的r个坐标轴能够使得空间的压缩使得数据的损失最小。
还是假设我们矩阵每一行表示一个样本,每一列表示一个feature,用矩阵的语言来表示,将一个m * n的矩阵A的进行坐标轴的变化,P就是一个变换的矩阵从一个N维的空间变换到另一个N维的空间,在空间中就会进行一些类似于旋转、拉伸的变化。
![]()
而将一个m * n的矩阵A变换成一个m * r的矩阵,这样就会使得本来有n个feature的,变成了有r个feature了(r < n),这r个其实就是对n个feature的一种提炼,我们就把这个称为feature的压缩。用数学语言表示就是:
但是这个怎么和SVD扯上关系呢?之前谈到,SVD得出的奇异向量也是从奇异值由大到小排列的,按PCA的观点来看,就是方差最大的坐标轴就是第一个奇异向量,方差次大的坐标轴就是第二个奇异向量…我们回忆一下之前得到的SVD式子:
![]()
在矩阵的两边同时乘上一个矩阵V,由于V是一个正交的矩阵,所以V转置乘以V得到单位阵I,所以可以化成后面的式子
![]()
将后面的式子与A * P那个m * n的矩阵变换为m * r的矩阵的式子对照看看,在这里,其实V就是P,也就是一个变化的向量。这里是将一个m * n 的矩阵压缩到一个m * r的矩阵,也就是对列进行压缩,如果我们想对行进行压缩(在PCA的观点下,对行进行压缩可以理解为,将一些相似的sample合并在一起,或者将一些没有太大价值的sample去掉)怎么办呢?同样我们写出一个通用的行压缩例子:

这样就从一个m行的矩阵压缩到一个r行的矩阵了,对SVD来说也是一样的,我们对SVD分解的式子两边乘以U的转置U'
![]()
这样我们就得到了对行进行压缩的式子。可以看出,其实PCA几乎可以说是对SVD的一个包装,如果我们实现了SVD,那也就实现了PCA了,而且更好的地方是,有了SVD,我们就可以得到两个方向的PCA,如果我们对A’A进行特征值的分解,只能得到一个方向的PCA。

为什么数据降维:
(1)在原始的高维空间中,包含有冗余信息以及噪音信息,在实际应用例如图像识别中造成了误差,降低了准确率;而通过降维,我们希望减少冗余信息所造成的误差,提高识别(或其他应用)的精度。
(2)或者希望通过降维算法来寻找数据内部的本质结构特征。
(3)通过降维来加速后续计算的速度
(4)还有其他很多目的,如解决数据的sparse问题
奇异值分解(SVD)
一、理论篇
上周说了PCA(主成分分析)的由来和应用,这周要讲SVD(奇异值分解),不免问一句,它们二者有啥区别和联系?
先讲PCA,它是一种统计方法。通过正交变换将一组可能存在相关性的变量转换为一组线性不相关的变量,转换后的这组变量叫主成分。
PCA的全部工作简单点说,就是对原始的空间中顺序地找一组相互正交的坐标轴,第一个轴是使得方差最大的,第二个轴是在与第一个轴正交的平面中使得方差最大的,第三个轴是在与第1、2个轴正交的平面中方差最大的,这样假设在N维空间中,我们可以找到N个这样的坐标轴,我们取前r个去近似这个空间,这样就从一个N维的空间压缩到r维的空间了,但是我们选择的r个坐标轴能够使得空间的压缩使得数据的损失最小。
它的核心是怎样让转换后的数据方差最大、协方差最小。
但是有个要命的问题:它对原始矩阵做了(1)零均值化(2)转置相乘,经过这两步,原始数据早已面目全非,不仅不稳定,而且丢失了矩阵的稀疏性和精度
勿忘初心,我们的目的是什么?最大程度上,用最小的空间保留数据最多的信息。
那我们能不能不对矩阵进行零均值化和转置相乘,直接把一个大矩阵拆分成多个小矩阵?
打个比方说吧。假如我们有一张15x25的图像:

如果直接用大矩阵来表示:

看吧,这样多浪费空间!有很多相关的地方,比如第1,2,倒数1,2列,是一样的
那如果我们把张图片相关的部分全部去掉,只留下不相关的呢?只有三列不相关:

我们的目的达到了,没有对原始数据做零均值、转置相乘,直接将大矩阵分为不相关三个小矩阵,用最小的空间保留了原始数据最多的信息。(当然还得再加个维度:大矩阵的第1,2,倒数1,2列为第一个小矩阵……后续会谈到)
总结:PCA给数据降维有较大的局限性,可直接将大矩阵拆分成小矩阵,保留了更多更精确的信息,而同样达到了降维的目的。
那么问题来了,怎么拆?
谈到拆矩阵,最熟悉的当然是特征值分解了。
但这里有个前提,A必须是对称矩阵。(由于对称阵特征向量两两正交,所以U为正交阵,正交阵的逆矩阵等于其转置)

讲到这,又要给自己科普一些矩阵知识了:矩阵变换。
一个二维向量X(你可以想象成一根箭头),怎样表示它的信息呢?x轴y轴(箭头投影到x轴y轴得到两个数a,b,用这两个数便表示了它全部的信息)。闲的蛋疼(我实在不想解释我为什么闲得蛋疼),我突然用U乘以X,

这个东西,学名叫:正交变换,正交矩阵将标准正交基映射为另一组标准正交基。
X还是那个X,信息还是这点信息,但是表示它的方式变了,我们换了一组正交基来表示。对基来讲,我本来是一组安分守己的好基,x轴y轴,被你的U一乘,再也不如以前那般堂堂正正了。

再回到拆矩阵。假设我们要拆的矩阵A就是那个U,对向量X做变换。
![]()
U’(表示U的转置)是正交矩阵,后半部分U’X不就是我们上面讨论的正交变换吗,于是我们可以用新的基来表示X,得到X的新的坐标(注意:X还是这个X,只是在U’这个坐标系下表示罢了),上式右边则可表示为:

其中,a1,a2,…,am,为X的新坐标,在U’这组基(这个坐标系)下的坐标值。再继续往左变换:
这一步变换好理解,就是对X在新坐标下的拉伸。
此时又回到了正交变换,这次是拉伸后的坐标用U变换,而U和U’互为逆矩阵,所以第三次变换和第一次变换互为逆变换。
总结:
一个向量X,被对称矩阵A变换,有三步:
1.A特征向量U’的正交变换
2.A特征值lambda的伸缩变换
3.A特征向量U的正交变换(第1步的逆变换)
站在基的角度,X还是那个X,是基被A变换了,所以对X才有了不同的表示。
因为U和U’都是正交基,所以被A变换前的基是正交基,变换后的基还是正交基。
科普完毕。
上面的分析都是针对对称矩阵,拆的是对称矩阵。再回顾一下我们要做什么:把大矩阵拆成多个不相关的小矩阵。说起不相关,就想到了正交。
于是目的变成了:怎样把大矩阵A拆成小矩阵A1.A2.A3...,而A1,A2,A3…还是正交的。
怎样判断小矩阵是正交的呢?我们想到了,正交矩阵将标准正交基映射为另一组标准正交基
最后,我们的目的就变成了:找到一组正交基,经过矩阵变换后还是正交基
那么,对任意M*N的矩阵,能否找到一组正交基使得经过它变换后还是正交基?能!
现在假设存在M*N矩阵A,事实上,A矩阵将n维空间中的向量映射到k(k<=m)维空间中,k=Rank(A)。现在的目标就是:在n维空间中找一组正交基,使得经过A变换后还是正交的。假设已经找到这样一组正交基:
![]()
则A矩阵将这组基映射为:
![]()
如果要使他们两两正交,即
![]()
因为V为正交矩阵,所以

所以如果正交基v选择为A'A的特征向量的话,由于A'A是对称阵,v之间两两正交,那么
这样就找到了正交基使其映射后还是正交基了,现在,将映射后的正交基单位化:
因为
![]()
所以有
提取单位向量

由此可得
![]()
当k < i <= m时,对u1,u2,...,uk进行扩展u(k+1),...,um,使得u1,u2,...,um为m维空间中的一组正交基,即
![]()
同样的,对v1,v2,...,vk进行扩展v(k+1),...,vn(这n-k个向量存在于A的零空间中,即Ax=0的解空间的基),使得v1,v2,...,vn为n维空间中的一组正交基,即
![]()
则可得到

继而可以得到A矩阵的奇异值分解:

总结:
最后我们把任意一个矩阵A拆分成三部分:
1.V’,A'A的特征向量的转置,表示了原始域的标准正交基
2.U,A.V,表示经过A变换后的co-domain的标准正交基
3.Σ,A'A特征值构成的对角矩阵,表示了V中的向量与U中相对应向量之间的关系
到此,我们便达到了我们的目的:将一个大矩阵拆分成多个不相关(正交)的小矩阵。
二、应用篇
SVD的应用好多,都好叼,现在不会。下回专门一篇文章再说。对SVD的理解还很浅,可能有些地方不知所以然甚至是错的。万一朋友圈有大神一不小心瞄了一眼,还望指点一二。
或有相关书籍、资料推荐的,更是感恩不尽
机器学习中的数学(5)-强大的矩阵奇异值分解(SVD)及其应用
版权声明:
本文由LeftNotEasy发布于http://leftnoteasy.cnblogs.com, 本文可以被全部的转载或者部分使用,但请注明出处,如果有问题,请联系[email protected]。也可以加我的微博: @leftnoteasy
前言:
上一次写了关于PCA与LDA的文章,PCA的实现一般有两种,一种是用特征值分解去实现的,一种是用奇异值分解去实现的。在上篇文章中便是基于特征值分解的一种解释。特征值和奇异值在大部分人的印象中,往往是停留在纯粹的数学计算中。而且线性代数或者矩阵论里面,也很少讲任何跟特征值与奇异值有关的应用背景。奇异值分解是一个有着很明显的物理意义的一种方法,它可以将一个比较复杂的矩阵用更小更简单的几个子矩阵的相乘来表示,这些小矩阵描述的是矩阵的重要的特性。就像是描述一个人一样,给别人描述说这个人长得浓眉大眼,方脸,络腮胡,而且带个黑框的眼镜,这样寥寥的几个特征,就让别人脑海里面就有一个较为清楚的认识,实际上,人脸上的特征是有着无数种的,之所以能这么描述,是因为人天生就有着非常好的抽取重要特征的能力,让机器学会抽取重要的特征,SVD是一个重要的方法。
在机器学习领域,有相当多的应用与奇异值都可以扯上关系,比如做feature reduction的PCA,做数据压缩(以图像压缩为代表)的算法,还有做搜索引擎语义层次检索的LSI(Latent Semantic Indexing)
另外在这里抱怨一下,之前在百度里面搜索过SVD,出来的结果都是俄罗斯的一种狙击枪(AK47同时代的),是因为穿越火线这个游戏里面有一把狙击枪叫做SVD,而在Google上面搜索的时候,出来的都是奇异值分解(英文资料为主)。想玩玩战争游戏,玩玩COD不是非常好吗,玩山寨的CS有神马意思啊。国内的网页中的话语权也被这些没有太多营养的帖子所占据。真心希望国内的气氛能够更浓一点,搞游戏的人真正是喜欢制作游戏,搞Data Mining的人是真正喜欢挖数据的,都不是仅仅为了混口饭吃,这样谈超越别人才有意义,中文文章中,能踏踏实实谈谈技术的太少了,改变这个状况,从我自己做起吧。
前面说了这么多,本文主要关注奇异值的一些特性,另外还会稍稍提及奇异值的计算,不过本文不准备在如何计算奇异值上展开太多。另外,本文里面有部分不算太深的线性代数的知识,如果完全忘记了线性代数,看本文可能会有些困难。
一、奇异值与特征值基础知识:
特征值分解和奇异值分解在机器学习领域都是属于满地可见的方法。两者有着很紧密的关系,我在接下来会谈到,特征值分解和奇异值分解的目的都是一样,就是提取出一个矩阵最重要的特征。先谈谈特征值分解吧:
1)特征值:
如果说一个向量v是方阵A的特征向量,将一定可以表示成下面的形式:

这时候λ就被称为特征向量v对应的特征值,一个矩阵的一组特征向量是一组正交向量。特征值分解是将一个矩阵分解成下面的形式:

其中Q是这个矩阵A的特征向量组成的矩阵,Σ是一个对角阵,每一个对角线上的元素就是一个特征值。我这里引用了一些参考文献中的内容来说明一下。首先,要明确的是,一个矩阵其实就是一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。比如说下面的一个矩阵:
 它其实对应的线性变换是下面的形式:
它其实对应的线性变换是下面的形式:
 因为这个矩阵M乘以一个向量(x,y)的结果是:
因为这个矩阵M乘以一个向量(x,y)的结果是:
 上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:
上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:

它所描述的变换是下面的样子:

这其实是在平面上对一个轴进行的拉伸变换(如蓝色的箭头所示),在图中,蓝色的箭头是一个最主要的变化方向(变化方向可能有不止一个),如果我们想要描述好一个变换,那我们就描述好这个变换主要的变化方向就好了。反过头来看看之前特征值分解的式子,分解得到的Σ矩阵是一个对角阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变化方向(从主要的变化到次要的变化排列)
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。也就是之前说的:提取这个矩阵最重要的特征。总结一下,特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
(说了这么多特征值变换,不知道有没有说清楚,请各位多提提意见。)
2)奇异值:
下面谈谈奇异值分解。特征值分解是一个提取矩阵特征很不错的方法,但是它只是对方阵而言的,在现实的世界中,我们看到的大部分矩阵都不是方阵,比如说有N个学生,每个学生有M科成绩,这样形成的一个N * M的矩阵就不可能是方阵,我们怎样才能描述这样普通的矩阵呢的重要特征呢?奇异值分解可以用来干这个事情,奇异值分解是一个能适用于任意的矩阵的一种分解的方法:
 假设A是一个N * M的矩阵,那么得到的U是一个N * N的方阵(里面的向量是正交的,U里面的向量称为左奇异向量),Σ是一个N * M的矩阵(除了对角线的元素都是0,对角线上的元素称为奇异值),V’(V的转置)是一个N * N的矩阵,里面的向量也是正交的,V里面的向量称为右奇异向量),从图片来反映几个相乘的矩阵的大小可得下面的图片
假设A是一个N * M的矩阵,那么得到的U是一个N * N的方阵(里面的向量是正交的,U里面的向量称为左奇异向量),Σ是一个N * M的矩阵(除了对角线的元素都是0,对角线上的元素称为奇异值),V’(V的转置)是一个N * N的矩阵,里面的向量也是正交的,V里面的向量称为右奇异向量),从图片来反映几个相乘的矩阵的大小可得下面的图片
那么奇异值和特征值是怎么对应起来的呢?首先,我们将一个矩阵A的转置 * A,将会得到一个方阵,我们用这个方阵求特征值可以得到: 这里得到的v,就是我们上面的右奇异向量。此外我们还可以得到:
这里得到的v,就是我们上面的右奇异向量。此外我们还可以得到:
 这里的σ就是上面说的奇异值,u就是上面说的左奇异向量。奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:
这里的σ就是上面说的奇异值,u就是上面说的左奇异向量。奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:
r是一个远小于m、n的数,这样矩阵的乘法看起来像是下面的样子:

右边的三个矩阵相乘的结果将会是一个接近于A的矩阵,在这儿,r越接近于n,则相乘的结果越接近于A。而这三个矩阵的面积之和(在存储观点来说,矩阵面积越小,存储量就越小)要远远小于原始的矩阵A,我们如果想要压缩空间来表示原矩阵A,我们存下这里的三个矩阵:U、Σ、V就好了。
二、奇异值的计算:
奇异值的计算是一个难题,是一个O(N^3)的算法。在单机的情况下当然是没问题的,matlab在一秒钟内就可以算出1000 * 1000的矩阵的所有奇异值,但是当矩阵的规模增长的时候,计算的复杂度呈3次方增长,就需要并行计算参与了。Google的吴军老师在数学之美系列谈到SVD的时候,说起Google实现了SVD的并行化算法,说这是对人类的一个贡献,但是也没有给出具体的计算规模,也没有给出太多有价值的信息。
其实SVD还是可以用并行的方式去实现的,在解大规模的矩阵的时候,一般使用迭代的方法,当矩阵的规模很大(比如说上亿)的时候,迭代的次数也可能会上亿次,如果使用Map-Reduce框架去解,则每次Map-Reduce完成的时候,都会涉及到写文件、读文件的操作。个人猜测Google云计算体系中除了Map-Reduce以外应该还有类似于MPI的计算模型,也就是节点之间是保持通信,数据是常驻在内存中的,这种计算模型比Map-Reduce在解决迭代次数非常多的时候,要快了很多倍。
Lanczos迭代就是一种解对称方阵部分特征值的方法(之前谈到了,解A’* A得到的对称方阵的特征值就是解A的右奇异向量),是将一个对称的方程化为一个三对角矩阵再进行求解。按网上的一些文献来看,Google应该是用这种方法去做的奇异值分解的。请见Wikipedia上面的一些引用的论文,如果理解了那些论文,也“几乎”可以做出一个SVD了。
由于奇异值的计算是一个很枯燥,纯数学的过程,而且前人的研究成果(论文中)几乎已经把整个程序的流程图给出来了。更多的关于奇异值计算的部分,将在后面的参考文献中给出,这里不再深入,我还是focus在奇异值的应用中去。
三、奇异值与主成分分析(PCA):
主成分分析在上一节里面也讲了一些,这里主要谈谈如何用SVD去解PCA的问题。PCA的问题其实是一个基的变换,使得变换后的数据有着最大的方差。方差的大小描述的是一个变量的信息量,我们在讲一个东西的稳定性的时候,往往说要减小方差,如果一个模型的方差很大,那就说明模型不稳定了。但是对于我们用于机器学习的数据(主要是训练数据),方差大才有意义,不然输入的数据都是同一个点,那方差就为0了,这样输入的多个数据就等同于一个数据了。以下面这张图为例子:
 这个假设是一个摄像机采集一个物体运动得到的图片,上面的点表示物体运动的位置,假如我们想要用一条直线去拟合这些点,那我们会选择什么方向的线呢?当然是图上标有signal的那条线。如果我们把这些点单纯的投影到x轴或者y轴上,最后在x轴与y轴上得到的方差是相似的(因为这些点的趋势是在45度左右的方向,所以投影到x轴或者y轴上都是类似的),如果我们使用原来的xy坐标系去看这些点,容易看不出来这些点真正的方向是什么。但是如果我们进行坐标系的变化,横轴变成了signal的方向,纵轴变成了noise的方向,则就很容易发现什么方向的方差大,什么方向的方差小了。
这个假设是一个摄像机采集一个物体运动得到的图片,上面的点表示物体运动的位置,假如我们想要用一条直线去拟合这些点,那我们会选择什么方向的线呢?当然是图上标有signal的那条线。如果我们把这些点单纯的投影到x轴或者y轴上,最后在x轴与y轴上得到的方差是相似的(因为这些点的趋势是在45度左右的方向,所以投影到x轴或者y轴上都是类似的),如果我们使用原来的xy坐标系去看这些点,容易看不出来这些点真正的方向是什么。但是如果我们进行坐标系的变化,横轴变成了signal的方向,纵轴变成了noise的方向,则就很容易发现什么方向的方差大,什么方向的方差小了。
一般来说,方差大的方向是信号的方向,方差小的方向是噪声的方向,我们在数据挖掘中或者数字信号处理中,往往要提高信号与噪声的比例,也就是信噪比。对上图来说,如果我们只保留signal方向的数据,也可以对原数据进行不错的近似了。
PCA的全部工作简单点说,就是对原始的空间中顺序地找一组相互正交的坐标轴,第一个轴是使得方差最大的,第二个轴是在与第一个轴正交的平面中使得方差最大的,第三个轴是在与第1、2个轴正交的平面中方差最大的,这样假设在N维空间中,我们可以找到N个这样的坐标轴,我们取前r个去近似这个空间,这样就从一个N维的空间压缩到r维的空间了,但是我们选择的r个坐标轴能够使得空间的压缩使得数据的损失最小。
还是假设我们矩阵每一行表示一个样本,每一列表示一个feature,用矩阵的语言来表示,将一个m * n的矩阵A的进行坐标轴的变化,P就是一个变换的矩阵从一个N维的空间变换到另一个N维的空间,在空间中就会进行一些类似于旋转、拉伸的变化。
而将一个m * n的矩阵A变换成一个m * r的矩阵,这样就会使得本来有n个feature的,变成了有r个feature了(r < n),这r个其实就是对n个feature的一种提炼,我们就把这个称为feature的压缩。用数学语言表示就是:
 但是这个怎么和SVD扯上关系呢?之前谈到,SVD得出的奇异向量也是从奇异值由大到小排列的,按PCA的观点来看,就是方差最大的坐标轴就是第一个奇异向量,方差次大的坐标轴就是第二个奇异向量…我们回忆一下之前得到的SVD式子:
但是这个怎么和SVD扯上关系呢?之前谈到,SVD得出的奇异向量也是从奇异值由大到小排列的,按PCA的观点来看,就是方差最大的坐标轴就是第一个奇异向量,方差次大的坐标轴就是第二个奇异向量…我们回忆一下之前得到的SVD式子:
 在矩阵的两边同时乘上一个矩阵V,由于V是一个正交的矩阵,所以V转置乘以V得到单位阵I,所以可以化成后面的式子
在矩阵的两边同时乘上一个矩阵V,由于V是一个正交的矩阵,所以V转置乘以V得到单位阵I,所以可以化成后面的式子
 将后面的式子与A * P那个m * n的矩阵变换为m * r的矩阵的式子对照看看,在这里,其实V就是P,也就是一个变化的向量。这里是将一个m * n 的矩阵压缩到一个m * r的矩阵,也就是对列进行压缩,如果我们想对行进行压缩(在PCA的观点下,对行进行压缩可以理解为,将一些相似的sample合并在一起,或者将一些没有太大价值的sample去掉)怎么办呢?同样我们写出一个通用的行压缩例子:
将后面的式子与A * P那个m * n的矩阵变换为m * r的矩阵的式子对照看看,在这里,其实V就是P,也就是一个变化的向量。这里是将一个m * n 的矩阵压缩到一个m * r的矩阵,也就是对列进行压缩,如果我们想对行进行压缩(在PCA的观点下,对行进行压缩可以理解为,将一些相似的sample合并在一起,或者将一些没有太大价值的sample去掉)怎么办呢?同样我们写出一个通用的行压缩例子:
 这样就从一个m行的矩阵压缩到一个r行的矩阵了,对SVD来说也是一样的,我们对SVD分解的式子两边乘以U的转置U'
这样就从一个m行的矩阵压缩到一个r行的矩阵了,对SVD来说也是一样的,我们对SVD分解的式子两边乘以U的转置U'
 这样我们就得到了对行进行压缩的式子。可以看出,其实PCA几乎可以说是对SVD的一个包装,如果我们实现了SVD,那也就实现了PCA了,而且更好的地方是,有了SVD,我们就可以得到两个方向的PCA,如果我们对A’A进行特征值的分解,只能得到一个方向的PCA。
这样我们就得到了对行进行压缩的式子。可以看出,其实PCA几乎可以说是对SVD的一个包装,如果我们实现了SVD,那也就实现了PCA了,而且更好的地方是,有了SVD,我们就可以得到两个方向的PCA,如果我们对A’A进行特征值的分解,只能得到一个方向的PCA。
四、奇异值与潜在语义索引LSI:
潜在语义索引(Latent Semantic Indexing)与PCA不太一样,至少不是实现了SVD就可以直接用的,不过LSI也是一个严重依赖于SVD的算法,之前吴军老师在矩阵计算与文本处理中的分类问题中谈到:
“三个矩阵有非常清楚的物理含义。第一个矩阵X中的每一行表示意思相关的一类词,其中的每个非零元素表示这类词中每个词的重要性(或者说相关性),数值越大越相关。最后一个矩阵Y中的每一列表示同一主题一类文章,其中每个元素表示这类文章中每篇文章的相关性。中间的矩阵则表示类词和文章雷之间的相关性。因此,我们只要对关联矩阵A进行一次奇异值分解,w 我们就可以同时完成了近义词分类和文章的分类。(同时得到每类文章和每类词的相关性)。”
上面这段话可能不太容易理解,不过这就是LSI的精髓内容,我下面举一个例子来说明一下,下面的例子来自LSA tutorial,具体的网址我将在最后的引用中给出:
 这就是一个矩阵,不过不太一样的是,这里的一行表示一个词在哪些title中出现了(一行就是之前说的一维feature),一列表示一个title中有哪些词,(这个矩阵其实是我们之前说的那种一行是一个sample的形式的一种转置,这个会使得我们的左右奇异向量的意义产生变化,但是不会影响我们计算的过程)。比如说T1这个title中就有guide、investing、market、stock四个词,各出现了一次,我们将这个矩阵进行SVD,得到下面的矩阵:
这就是一个矩阵,不过不太一样的是,这里的一行表示一个词在哪些title中出现了(一行就是之前说的一维feature),一列表示一个title中有哪些词,(这个矩阵其实是我们之前说的那种一行是一个sample的形式的一种转置,这个会使得我们的左右奇异向量的意义产生变化,但是不会影响我们计算的过程)。比如说T1这个title中就有guide、investing、market、stock四个词,各出现了一次,我们将这个矩阵进行SVD,得到下面的矩阵:
 左奇异向量表示词的一些特性,右奇异向量表示文档的一些特性,中间的奇异值矩阵表示左奇异向量的一行与右奇异向量的一列的重要程序,数字越大越重要。
左奇异向量表示词的一些特性,右奇异向量表示文档的一些特性,中间的奇异值矩阵表示左奇异向量的一行与右奇异向量的一列的重要程序,数字越大越重要。
继续看这个矩阵还可以发现一些有意思的东西,首先,左奇异向量的第一列表示每一个词的出现频繁程度,虽然不是线性的,但是可以认为是一个大概的描述,比如book是0.15对应文档中出现的2次,investing是0.74对应了文档中出现了9次,rich是0.36对应文档中出现了3次;
其次,右奇异向量中一的第一行表示每一篇文档中的出现词的个数的近似,比如说,T6是0.49,出现了5个词,T2是0.22,出现了2个词。
然后我们反过头来看,我们可以将左奇异向量和右奇异向量都取后2维(之前是3维的矩阵),投影到一个平面上,可以得到:
 在图上,每一个红色的点,都表示一个词,每一个蓝色的点,都表示一篇文档,这样我们可以对这些词和文档进行聚类,比如说stock 和 market可以放在一类,因为他们老是出现在一起,real和estate可以放在一类,dads,guide这种词就看起来有点孤立了,我们就不对他们进行合并了。按这样聚类出现的效果,可以提取文档集合中的近义词,这样当用户检索文档的时候,是用语义级别(近义词集合)去检索了,而不是之前的词的级别。这样一减少我们的检索、存储量,因为这样压缩的文档集合和PCA是异曲同工的,二可以提高我们的用户体验,用户输入一个词,我们可以在这个词的近义词的集合中去找,这是传统的索引无法做到的。
在图上,每一个红色的点,都表示一个词,每一个蓝色的点,都表示一篇文档,这样我们可以对这些词和文档进行聚类,比如说stock 和 market可以放在一类,因为他们老是出现在一起,real和estate可以放在一类,dads,guide这种词就看起来有点孤立了,我们就不对他们进行合并了。按这样聚类出现的效果,可以提取文档集合中的近义词,这样当用户检索文档的时候,是用语义级别(近义词集合)去检索了,而不是之前的词的级别。这样一减少我们的检索、存储量,因为这样压缩的文档集合和PCA是异曲同工的,二可以提高我们的用户体验,用户输入一个词,我们可以在这个词的近义词的集合中去找,这是传统的索引无法做到的。
不知道按这样描述,再看看吴军老师的文章,是不是对SVD更清楚了?:-D
参考资料:
1)A Tutorial on Principal Component Analysis, Jonathon Shlens
这是我关于用SVD去做PCA的主要参考资料
2)http://www.ams.org/samplings/feature-column/fcarc-svd
关于svd的一篇概念好文,我开头的几个图就是从这儿截取的
3)http://www.puffinwarellc.com/index.php/news-and-articles/articles/30-singular-value-decomposition-tutorial.html
另一篇关于svd的入门好文
4)http://www.puffinwarellc.com/index.php/news-and-articles/articles/33-latent-semantic-analysis-tutorial.html
svd与LSI的好文,我后面LSI中例子就是来自此
5)http://www.miislita.com/information-retrieval-tutorial/svd-lsi-tutorial-1-understanding.html
另一篇svd与LSI的文章,也还是不错,深一点,也比较长
6)Singular Value Decomposition and Principal Component Analysis, Rasmus Elsborg Madsen, Lars Kai Hansen and Ole Winther, 2004
跟1)里面的文章比较类似。
http://blog.csdn.net/wangjian1204/article/details/50642732
http://blog.jobbole.com/88208/
http://blog.chinaunix.net/uid-20761674-id-4040274.html
http://blog.csdn.net/zhongkejingwang/article/details/43053513