MobileNet v1&v2&v3 创新点及结构简述
目录
一、背景
二、MobileNet v1
1. 网络创新点
2. 网络结构
三、MobileNet v2
1. 网络创新点
2. 网络结构
四、MobileNet v3
1. 网络创新点
2. 网络结构
一、背景
MobileNet v1是由google团队在2017年提出的, 专注于移动端或者嵌入式设备中的轻量级CNN网络。 相比传统卷积神经网络,在准确率小幅降低的前提下大大减少模型参数与运算量。相比VGG16准确率减少了0.9%,但模型参数只有VGG的1/32。
论文地址:MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
MobileNet v2是由google团队在2018年提出的。
论文地址:MobileNetV2: Inverted Residuals and Linear Bottlenecks
MobileNet v3是由google团队在2019年提出的。
论文地址:Searching for MobileNetV3
二、MobileNet v1
1. 网络创新点
- Depthwise Coinvolution,大大减少运算量和参数数量
- 增加超参数α、β,便于调节网络模型
1.1. Depthwise Coinvolution
基本思想:将标准卷积拆分为两个分卷积,构成深度可分离卷积(Depthwise Separable Coinvolution):第一层称为深度卷积(depthwise convolution),对每个输入通道应用单通道的轻量级滤波器;第二层称为逐点卷积(pointwise convolution),负责计算输入通道的线性组合构建新的特征。
传统卷积:
- 卷积核通道数 = 输入特征图通道数
- 输出特征图通道数 = 卷积核个数

DW卷积(Depthwise Coinvolution):
- 卷积核通道数 = 1
- 输入特征图通道数 = 卷积核个数 = 输出特征图通道数

PW卷积(Pointwise Coinvolution):
- 与普通卷积一样,但是卷积核大小为1
深度可分离卷积(Depthwise Separable Coinvolution):
- 我们通常所使用的是3×3的卷积核,将DW卷积和PW卷积一起使用,理论上普通卷积核计算量是DW+PW的8~9倍。两者计算量比较结果如下:

K:卷积核尺寸,C_out:输出通道数
1.2. 超参数α、β
- α(Width Multiplier):卷积核个数倍率,控制卷积过程中采用卷积核个数
- β(Resolution Multiplier):输入图像分辨率参数,控制处理图像的大小
2. 网络结构
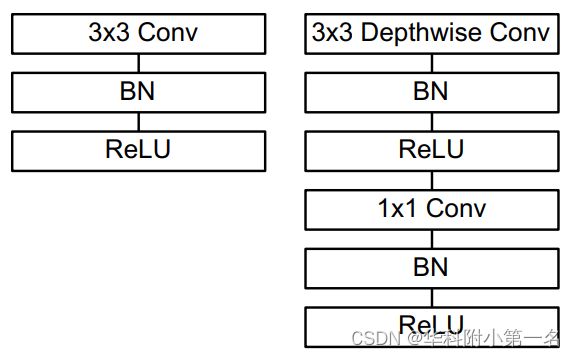
2.1. 标准卷积层 vs 深度可分离卷积卷积层
2.2. MobileNet v1整体结构

三、MobileNet v2
1. 网络创新点
- Inverted Residuals
- Linear Bottlenecks
1.1. Inverted Residuals
深度卷积本身没有改变通道的能力,如果输入通道很少,DW深度卷积只能在低维度上工作,这样效果并不会很好。而逐点卷积也就是1×1卷积可以用来升维和降维,那就可以在DW深度卷积之前使用PW卷积进行升维(升维倍数为t,t=6),再在一个更高维的空间中进行卷积操作来提取特征。
ResNet的残差结构:对于输入特征矩阵采用1x1卷积进行压缩,再通过3x3卷积核进行卷积处理,最后再采用1x1卷积核扩充通道数
倒残差结构:对于输入特征矩阵采用1x1卷积核将通道数变得更深,再通过3x3的卷积核进行DW卷积,最后再采用1x1卷积核进行降维处理

1.2. Linear Bottlenecks
在MobileNet v1网络的实际使用中会发现DW卷积的部分卷积核容易废掉(即卷积核参数为0),针对这个问题,原论文中作者通过实验得出:ReLU激活函数会对低维特征信息造成大量损失,对高维造成损失比较小,而在倒残差结构中的输出是一个低维特征向量,因此使用线性激活函数避免特征信息损失。因此倒残差结构的最后一个1x1卷积层,使用了线性激活函数,而不是ReLU激活函数。

2. 网络结构
2.1. 倒残差结构图
在普通残差结构中采用的是ReLU激活函数,在倒残差结构中采用的是ReLU6激活函数。当stride=1且输入特征矩阵与输出特征矩阵shape相同时才有shortcut连接。

2.2. MobileNet v2整体结构

t是扩张倍数,即倒残差结构第一层1x1卷积核个数的扩张系数;c是输出的通道数;n是倒残差结构的重复次数;s是步长,代表每一个block所对应的第一层bottleneck的步长,其他的为1。
四、MobileNet v3
1. 网络创新点
- 新版Block
- 使用NAS搜索参数
- 重新设计耗时层结构
1.1. 新版Block
与MobileNetv2相比,Mobilenetv3的block中加入了SE模块,更换了激活函数 。更新的激活函数在图中用NL表示非线性激活函数统一表示,用到的激活函数主要有hards-wish、relu两种。最后那个1x1降维投影层用的是线性激活(f(x)=x),也可以理解为没用激活。MobileNetv3的倒残差结构:

SE模块理解
SE(Squeeze-and-Excitation) 模块类似于一个轻量级的注意力模块,注意力机制的作用方式是调整每个通道的权重,以在Mobilenetv3中的应用为例进行理解,如下图所示。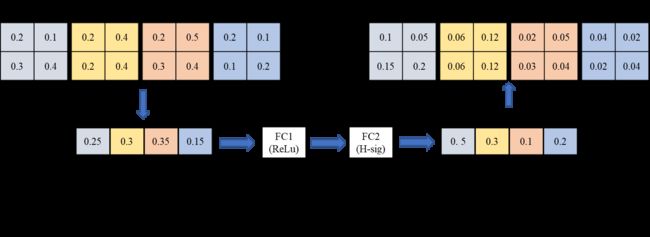
hards-wish
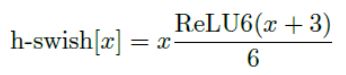
作者发现一种新出的激活函数swish x(如下) ,但认为这种非线性激活函数虽然提高了精度,但在嵌入式环境中,计算量太大,所以提出了h-swish。

可以用一个近似函数来逼急这个swish。作者选择的是基于ReLU6,作者认为几乎所有的软件和硬件框架上都可以使用ReLU6的优化实现。其次,它能在特定模式下消除了由于近似sigmoid的不同实现而带来的潜在的数值精度损失,在量化模式下会提高大约15%的效率。
作者认为随着网络的深入,应用非线性激活函数的成本会降低,能够更好的减少参数量。作者发现swish的大多数好处都是通过在更深的层中使用它们实现的。因此,在V3的架构中,只在模型的后半部分使用h-swish。
1.2. 使用NAS搜索参数(Neural Architecture Search)
主要结合两种技术:资源受限的NAS(platform-aware NAS)与NetAdapt。资源受限的NAS,用于在计算和参数量受限的前提下搜索网络来优化各个块(block),所以称之为模块级搜索(Block-wise Search) 。NetAdapt,用于对各个模块确定之后网络层的微调每一层的卷积核数量,所以称之为层级搜索(Layer-wise Search)。一旦通过体系结构搜索找到模型,我们就会发现最后一些层以及一些早期层计算代价比较高昂。于是作者决定对这些架构进行一些修改,以减少这些慢层(slow layers)的延迟,同时保持准确性。这些修改显然超出了当前搜索的范围。
1.3. 重新设计耗时层结构
精简早期层
减少第一个卷积层的卷积核个数(32减为16),原论文中作者说减少卷积核后准确率不变且能够减少计算量,节省2毫秒时间。
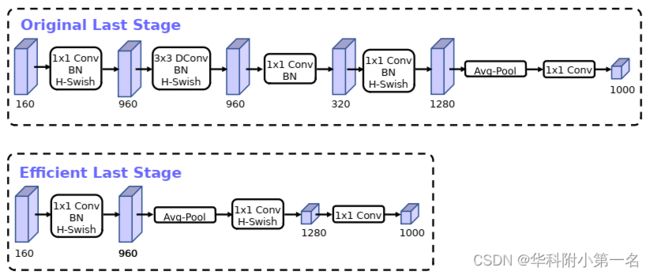
精简最后阶段
使用NAS搜索出来的网络结构的最后一部分为Original Last Stage,发现这一部分比较耗时,因此对其进行精简为Efficient Last Stage,精简后准确率不变,并减少10ms耗时,提速15%。
2. 网络结构
MobileNetV3定义了两个模型: MobileNet V3-Large和MobileNet V3-Small。V3-Large是针对高资源情况下的使用,相应的,V3-small就是针对低资源情况下的使用。主要的区别是通道数的变化与bneck的次数。
2.1. V3-Large

- 第一列:每个特征层的输入变化
- 第二列:特征层的倒残差结构,NBN为不用BN层
- 第三列:倒残差结构中的第一层1x1卷积升维后的通道数,第一个块没有1x1卷积升维操作
- 第四列:倒残差结构输出的通道数
- 第五列:SE是否使用SE模块
- 第六列:使用激活函数的种类,HS代表h-swish,RE代表RELU。
- 第七列:倒残差结构所用的步长
2.2. V3-Small

参考
轻量级神经网络“巡礼”(二)—— MobileNet,从V1到V3 https://zhuanlan.zhihu.com/p/70703846
https://zhuanlan.zhihu.com/p/70703846