图像分割 - 阈值处理 - 多阈值处理(OTSU)
目录
1. 多阈值处理介绍
2. 代码讲解
3. 完整代码
1. 多阈值处理介绍
之前介绍的都是全局单个阈值对图像的分割。固定阈值法,阈值是人工根据灰度直方图的波谷进行设置的。全局阈值法,根据不停的迭代两个区域间的平均灰度进行分割。OUST最大类间方差法,是根据两个子区域不同类之间的最大方差分割。
事实上,OTSU大津法可以扩展到任意数量的阈值
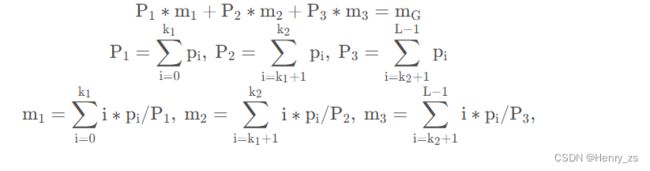
只需要将之前两个类的类间方差更改为三个类即可:
![]()
- P1是第一个区域的像素概率,及落在第一个区域的像素点 / 总像素点个数
- P2 、 P3 是落在第二、第三区域的概率。因此满足 P1+P2+P3 = 1
- mG 是整幅图像的平均灰度 , m1、m2、m3 是三个区域各自的平均灰度
- 它们有着下面的关系:
这里只要保证类间方差σB 最大的话,就可以完成三个区域的分割
因为分割三个区域,需要两个阈值k1、k2,因此阈值的范围需要注意
灰度值的范围:
第一区域G1----------------k1-----------------第二区域-----------------k2---------------------第三区域
迭代的过程从k1开始,k1的范围是:1~L-3 ,因为0是没有意义的,灰度值0的前面没有第一区域,同样,如果k1取到最后的两个灰度值的话,就没有k2以及第二第三区域了
然后k2开始迭代,k2的范围是:k1+1~L - 2 ,也是同样的道理,假设L=256的话,k2最多取到254,要不然第三区域也就没有了
注意,这个迭代过程是类似于打印九九乘法表的方式迭代,不能先迭代出k1,在迭代出k2
2. 代码讲解
我们所有的工作就是为了求等号右边的值,然后通过迭代k1、k2,找到最大的类间方差σB
![]()
首先,计算全体图像的灰度直方图hist,定义灰度范围grayScale
然后计算出图片像素点的个数,为了求P1、P2、P3 各个区域的像素概率
最后求出mG 整幅图像的平均灰度

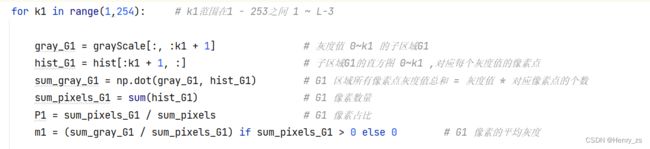
然后,开始迭代k1,因为k1的位置就可以确定第一区域G1的像素区域。如下,灰度值小于等于k1的都是第一区域G1的像素点

通过切片,找出G1区域的灰度动态范围和像素点的直方图。
然后计算P1的值和G1区域的平均灰度。这里为了防止G1区域没有像素点做了判断
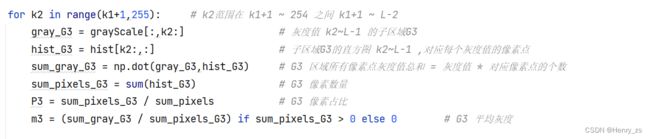
然后开始迭代k2,大于等于k2的为第三区域。
下面的代码就是计算G3区域的像素概率P3和平均灰度m3
最后就是计算G2区域的值,通过之前P和m对应的关系,可以之间用公式计算得出
然后判断类间方差varB是否是最大的,是的话保存k1、k2、varB到T1、T2、varMax里面。
最后就是多阈值处理,将两个阈值和图像返回即可

3. 完整代码
import cv2
import numpy as np
# 多阈值处理
def double_threshold_processing(x): # x 为传入的图像
hist = cv2.calcHist([x], [0], None, [256], [0, 256]) # 图像的灰度直方图 shape = (256,1)
grayScale = np.arange(256).reshape(1, -1) # 灰度级 [0,255] shape =(1,256)
sum_pixels = x.shape[0] * x.shape[1] # 图像总共像素点的个数
mG = x.mean() # 整幅图像的平均灰度
T1,T2,varMax = 0,0,0.0 # 双阈值T1、T2,类间方差varMax
for k1 in range(1,254): # k1范围在1 - 253之间 1 ~ L-3
gray_G1 = grayScale[:, :k1 + 1] # 灰度值 0~k1 的子区域G1
hist_G1 = hist[:k1 + 1, :] # 子区域G1的直方图 0~k1 ,对应每个灰度值的像素点
sum_gray_G1 = np.dot(gray_G1, hist_G1) # G1 区域所有像素点灰度值总和 = 灰度值 * 对应像素点的个数
sum_pixels_G1 = sum(hist_G1) # G1 像素数量
P1 = sum_pixels_G1 / sum_pixels # G1 像素占比
m1 = (sum_gray_G1 / sum_pixels_G1) if sum_pixels_G1 > 0 else 0 # G1 像素的平均灰度
for k2 in range(k1+1,255): # k2范围在 k1+1 ~ 254 之间 k1+1 ~ L-2
gray_G3 = grayScale[:,k2:] # 灰度值 k2~L-1 的子区域G3
hist_G3 = hist[k2:,:] # 子区域G3的直方图 k2~L-1 ,对应每个灰度值的像素点
sum_gray_G3 = np.dot(gray_G3,hist_G3) # G3 区域所有像素点灰度值总和 = 灰度值 * 对应像素点的个数
sum_pixels_G3 = sum(hist_G3) # G3 像素数量
P3 = sum_pixels_G3 / sum_pixels # G3 像素占比
m3 = (sum_gray_G3 / sum_pixels_G3) if sum_pixels_G3 > 0 else 0 # G3 平均灰度
P2 = 1.0 - P1 - P3 # G2 区域的像素占比
m2 = ((mG - P1 * m1 - P3 * m3) / P2) if P2 > 0 else 0 # G2 平均灰度
varB = P1 * (m1 - mG) ** 2 + P2 * (m2 - mG) ** 2 + P3 * (m3 - mG) ** 2 # 类间方差
if varB > varMax: # 保存最大的类间方差
T1,T2,varMax = k1,k2,varB
x[x <= T1] = 0
x[(x>T1)&(x= T2] = 255
return T1,T2,x
img = cv2.imread("img.tif",0)
ret1,ret2,dst = double_threshold_processing(img.copy()) # 多阈值处理
print(ret1,ret2)
cv2.imshow('img',np.hstack((img,dst)))
cv2.waitKey()
cv2.destroyAllWindows()
处理的结果:返回的两个阈值为:80 、 178
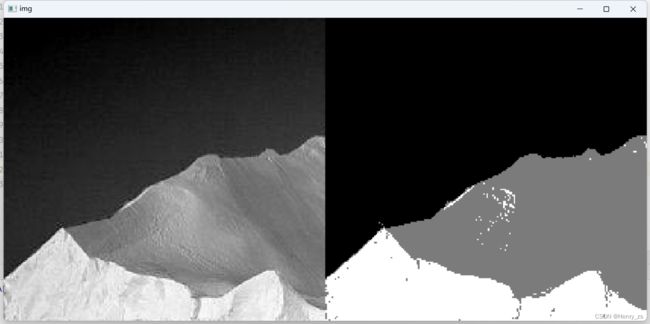
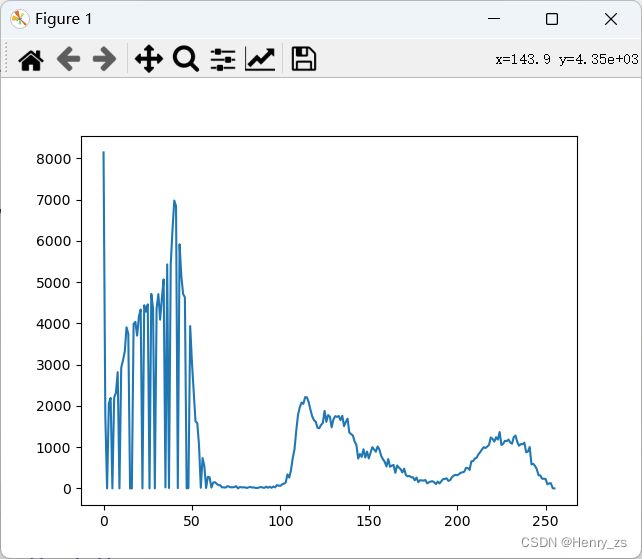
双阈值处理的方法应用于灰度直方图有两个波谷的情况,如下