Yolov5笔记
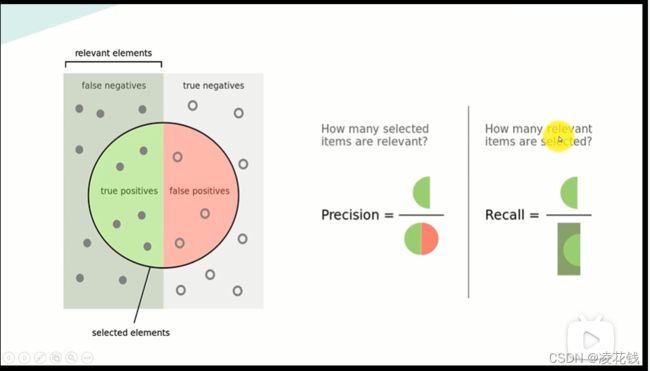
用以区分Precision以及Recall非常形象,便于理解
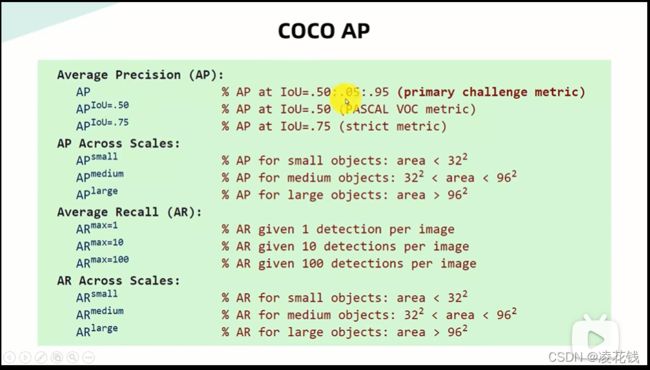
coco对于AP以及mAP的细化定义
文章推荐,讲的非常清楚!!!
深入浅出yolo系列之yolov5
相应的改进策略以及学习方向
如何入门,以及改进策略
这篇yolov5 6.1 与之前yolov5老版本网络之间有非常详细的讲解
强烈推荐
一些改进方法实验记录
1.注意力机制
(1)使用了Conv_CBAM,将所有的Conv替换
这里这里
效果几乎没有!!!
推荐博客如何添加注意力机制
(2)注意力机制结合Bottleneck,替换backbone中的所有C3模块
(3)在backbone最后单独加入注意力模块
(4)yolov56.0 注意力机制添加在SPPF的上面
2.使用ACON激活函数替换Conv模块中的ReLu激活函数
博客推荐非常详细,强烈推荐
3.BiFPN特征融合
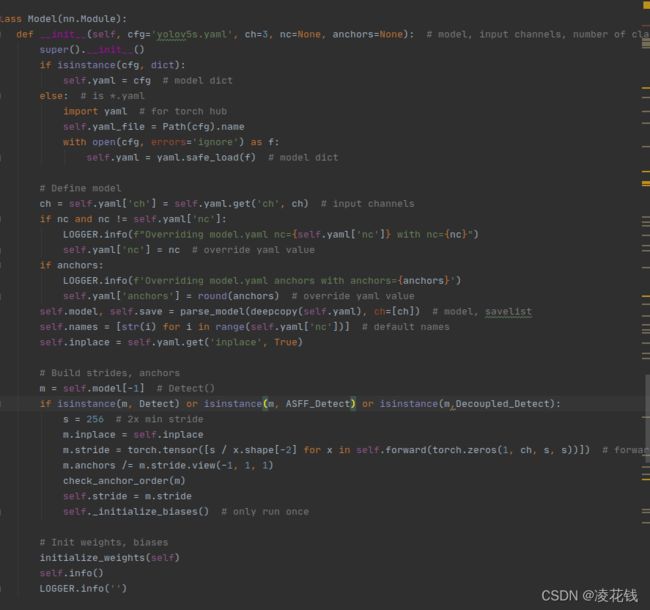
4.ASFF_Detect and Decoupled_Detect
参照这位博主博主传送门的代码修改,可能会出现错误“no stride”
这时候需要去yolo.py文件下找到Model类下面的
build strides,anchars下面去添加模型类型
5.修改损失函数
首先以alpha IOU为例
1.先到yolov5的utils/metrics.py文件下实现alpha IOU
#--------------------------------------alpha_iouloss
def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
# Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
box2 = box2.T
# Get the coordinates of bounding boxes
if x1y1x2y2: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
else: # transform from xywh to xyxy
b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
# Intersection area
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
# Union Area
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
union = w1 * h1 + w2 * h2 - inter + eps
# change iou into pow(iou+eps)
# iou = inter / union
iou = torch.pow(inter/union + eps, alpha)
beta = 2 * alpha
if GIoU or DIoU or CIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** beta + ch ** beta + eps # convex diagonal
rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
rho2 = (rho_x ** beta + rho_y ** beta) / (2 ** beta) # center distance
if DIoU:
return iou - rho2 / c2 # DIoU
elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
with torch.no_grad():
alpha_ciou = v / ((1 + eps) - inter / union + v)
# return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
# c_area = cw * ch + eps # convex area
# return iou - (c_area - union) / c_area # GIoU
c_area = torch.max(cw * ch + eps, union) # convex area
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
else:
return iou # torch.log(iou+eps) or iou
2.将utils/loss.py文件中的bbox_iou替换为bbox_alpha_iou即可
#iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
iou = bbox_alpha_iou(pbox.T, tbox[i], x1y1x2y2=False, alpha=3, CIoU=True)
3.想要修改为EIOU,只需要将bbox_iou后面的参数修改即可
iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, EIoU=True) # iou(prediction, target)
一些数据处理的推荐
这里数据集标签的转换以及数据集划分代码
工具集