精读论文:Pareto Multi Objective Optimization(附翻译)
Pareto Multi Objective Optimization
一、总结
1.1 多目标规划
任何多目标规划问题,都有两个基本部分组成:
(1)两个以上的目标函数
(2)若干个约束条件
问题的数学模型一般可以写成如下形式(N个目标函数,M个约束条件)
最小化
y → = F → ( x → ) = [ f 1 ( x → ) , f 2 ( x → ) , . . . , f N ( x → ) ] T \mathop y \limits^{\rightarrow}=\mathop F \limits^{\rightarrow}(\mathop x \limits^{\rightarrow})=[f_1(\mathop x\limits^{\rightarrow}),f_2(\mathop x\limits^{\rightarrow}),...,f_N(\mathop x\limits^{\rightarrow})]^T y→=F→(x→)=[f1(x→),f2(x→),...,fN(x→)]T
约束条件:
g j ( x → ) ≤ 0 , j = 1 , 2 , . . . , M g_j(\mathop x\limits^{\rightarrow})\leq0,j=1,2,...,M gj(x→)≤0,j=1,2,...,M
where:
x → = [ x 1 , x 2 , . . . , x P ] T ∈ Ω \mathop x\limits^{\rightarrow}=[x_1,x_2,...,x_P]^T\in \Omega x→=[x1,x2,...,xP]T∈Ω
f 1 ( x ) , f 2 ( x ) , . . . , f n ( x ) f_1(x),f_2(x),...,f_n(x) f1(x),f2(x),...,fn(x)表示n个目标函数,目的都是使之达到最小, x → \mathop x\limits^{\rightarrow} x→是决策变量向量
1.2 Pareto最优解
摘自该文章
1:解A优于解B(解A强帕累托支配解B)
假设现在有两个目标函数,解A对应的目标函数值都比解B对应的目标函数值好,则称解A比解B优越,也可以叫做解A强帕累托支配解B
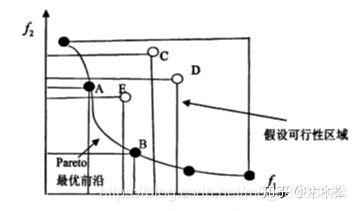
下图中代表的是两个目标的的解的情况,横纵坐标表示两个目标函数值,E点表示的解所对应的两个目标函数值都小于C,D两个点表示的解所对应的两个目标函数值,所以解E优于解C,D。
2:解A无差别于解B
同样假设两个目标函数,解A对应的一个目标函数值优于解B对应的一个目标函数值,但是解A对应的另一个目标函数值要差于解B对应的一个目标函数值,则称解A无差别于解B,举个例子,还是上面的图,点C和点D就是这种情况,C点在第一个目标函数的值比D小,在第二个函数的值比D大。
3:最优解
假设在设计空间中,解A对应的目标函数值优越其他任何解,则称解A为最优解,举个例子,下图的 x 1 x_1 x1就是两个目标函数的最优解,使两个目标函数同时达到最小,但是前面也说过,实际生活中这种解是不可能存在的。由此提出了帕累托最优解。
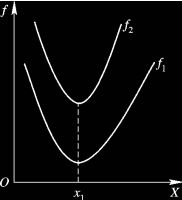
4:帕累托最优解
同样假设两个目标函数,对于解A而言,在变量空间中找不到其他的解能够优于解A(注意这里的优于一定要两个目标函数值都优于A对应的函数值),那么解A就是帕累托最优解,举个例子,下图中应该找不到比 x 1 x_1 x1对应的目标函数都小的解了吧,即找不到一个解优于 x 1 x_1 x1了,同理也找不到比 x 2 x_2 x2更优的解了,所以这两个解都是帕累托最优解,实际上, x 1 , x 2 x_1,x_2 x1,x2 这个范围的解都是帕累托最优解因此对于多目标优化问题而言,帕累托最优解只是问题的一个可接受解,一般都存在多个帕累托最优解,这个时候就需要人们自己决策了。
5:帕累托最优前沿
实心点表示的解都是帕累托最优解,所有的帕累托最优解构成帕累托最优解集,这些解经目标函数映射构成了该问题的Pareto最优前沿或Pareto前沿面,即帕累托最优解对应的目标函数值就是帕累托最优前沿。
对于两个目标的问题,其Pareto最优前沿通常是条线。而对于多个目标,其Pareto最优前沿通常是一个超曲面。
1.3 多目标规划求解传统方法
1.3.1 加权组合法
(线性加权法)
在将各个分目标函数组合为总的目标函数的过程中,引入加权因子,以平衡各指标以及分目标间的相对重要性。
最小化
Z = ∑ j = 1 N w j f j ( x → ) Z=\sum \limits_{j=1}^N w_jf_j({\mathop x\limits^{\rightarrow}}) Z=j=1∑Nwjfj(x→)
with w j > 0 \quad w_j>0 \quad wj>0 and ∑ j = 1 N w j = 1 \quad \sum \limits_{j=1}^Nw_j=1 j=1∑Nwj=1
1.3.2 目标规划法
(理想点法)
先分别求出各个分目标函数的最优值 f i ( X ∗ ) f_i(X^*) fi(X∗),由这些最优值构成的目标点称为理想点。然后根据实际点与理想点之间的距离构造评价函数和单目标优化问题:
最小化
Z = ∑ j = 1 N w j ∣ f j ( x → ) − T j ∣ Z=\sum\limits_{j=1}^Nw_j|f_j(\mathop x\limits^\rightarrow)-T_j| Z=j=1∑Nwj∣fj(x→)−Tj∣
1.3.3 约束模型
(极大极小法)
若规划问题的某一目标可以给出一个可供选择的范围,则该目标就可以作为约束条件而被排除出目标组,进入约束条件组。例如除第一个目标外,其余目标都可以提出一个可供选择的范围,则该多目标规划问题就可以转化为单目标规划问题:
m a x ( m i n ) Z = f 1 ( x 1 , x 2 , . . . , x n ) max(min)Z=f_1(x_1,x_2,...,x_n) max(min)Z=f1(x1,x2,...,xn) ϕ i ( x 1 , x 2 , . . . , x n ) ≤ g i ( i = 1 , 2 , . . . , m ) \phi_i(x_1,x_2,...,x_n)\leq g_i(i=1,2,...,m) ϕi(x1,x2,...,xn)≤gi(i=1,2,...,m) f j m i n ≤ f j ≤ f j m a x ( j = 2 , 3 , . . . , k ) f_j^{min}\leq f_j\leq f_j^{max}(j=2,3,...,k) fjmin≤fj≤fjmax(j=2,3,...,k)
1.4 多目标规划求解智能技术
1.4.1 小生境
(niche)
小生境是一种生物学的概念,是指特定环境下的一种生存环境。生物在其进化过程中,一般总是与自己相同的物种生活在一起,共同繁衍后代。
小生境技术的基本思想是将生物学中的小生境概念应用于进化计算中,将进化计算中的每一代个体划分为若干类,每个类中选出若干适应度较大的个体作为一个类的优秀代表组成一个群,再在种群中,以及不同种群之间杂交、变异产生新一代的个体种群。
小生境计数(niche count)
用来估计个体i所有邻居(小生境内)的拥挤程度 m i = ∑ j ∈ P o p S h [ d ( i , j ) ] m_i=\sum\limits_{j\in Pop}Sh[d(i,j)] mi=j∈Pop∑Sh[d(i,j)]其中, d ( i , j ) d(i,j) d(i,j)表示个体i和个体j的距离
共享函数Sh
S h ( d ) = { 1 − d σ s h a r e d ≤ σ s h a r e 0 d > σ s h a r e Sh(d)=\begin{cases}1-\frac{d}{\sigma_{share}}&d\leq \sigma_{share}\\0&d>\sigma_{share} \end{cases} Sh(d)={1−σshared0d≤σshared>σshare
二、翻译
0. 摘要
本文的目的是提供解决多目标优化问题的基础知识。关键是智能元启发式方法(进化算法或者基于群的技术),关键是有效地生成帕累托最优前沿的技术。在本文给出了多目标优化的一般表述,介绍了帕累托最优概念,并给出了在电力系统领域多目标问题例子的解决方法。
1. 前言
在许多商业,管理和工程应用程序中,优化是必不可少的过程。 在这些领域中,需要满足多个且经常相互冲突的目标。解决此类问题的传统方法是将所有目标转换为单个目标(SO)函数。最终目标在维持系统或过程的物理约束的同时找到最小化或最大化该单个目标的解决方案。优化解决方案产生的单个值反映了所有目标之间的折衷。 此过程中的技术是制定功能以实现所需的折衷。
将多个目标转换为单个目标函数通常是通过将所有目标汇总在一个加权函数中或将除一个目标之外的所有目标简单地转换为约束来完成的。 这种解决多目标(MO)优化问题的方法具有以下局限性:1)它要求先验知识,了解目标的相对重要性,并且将目标的限制转换为约束条件2)聚合函数仅导致一个解; 3)无法轻易评估目标之间的权衡; 4)除非搜索空间是凸的,否则可能无法获得解决方案。
对于具有多个目标冲突的系统,不再接受这种简单的优化过程。 系统工程师可能希望同时了解所有目标的所有可能的优化解决方案。 在商业世界中,这被称为权衡分析。 在工程领域,有一些需要进行权衡分析的示例。 例如,在降低成本的同时设计分布式控制器是两个相互矛盾的目标。 类似地,在芯片上放置更多功能块同时最小化芯片面积和/或功耗是矛盾的目标。 要找到一天中行驶距离最长,所需能量最少的车辆是一个多目标问题。 在保持稳定劳动力的同时将企业的运营成本降至最低是一个相互矛盾的目标优化问题。
在电力系统中,也需要对多目标进行优化。例如,在环境/经济负荷分配中,将运行成本最小化,将化石燃料排放最小化和将系统损耗最小化是可以结合在一起产生多目标问题。要使燃料成本,排放和总功率损失达到最小,要遵守稳定性约束,发电能力约束和安全约束,因此需要多目标优化技术。此外,优化反应资源的位置以及传输的大小、分配系统是MO问题的另一个示例。传输网络中其他一些冲突的目标是传输损耗,传输容量和电压稳定性。 配电网络的其他目标包括配电损耗,功率因数和电压稳定度。
与SO问题相比,MO问题更难解决,因为没有唯一的解决方案。 而是有一组可接受的折衷最佳解决方案。 该组称为帕累托前沿。MO优化实际上被认为是多准则决策(MCDM: multi criteria decision making)过程的分析阶段,包括确定所有多目标问题的解,这些解在帕累托意义上是最优的。设计人员或决策者(DM)最希望使用的解决方案,是从Pareto集中选择的。
生成帕累托集具有多个优点。 Pareto集允许DM通过查看广泛的选项来做出明智的决定,因为它包含了从“总体”角度来看是最佳的解决方案。 不像SO可能忽略这种折衷观点的优化。 从系统工程师的角度来看,此功能很有用,因为它可以更好地理解系统,在该系统中可以探索所有目标的决策后果。
本文的目的是提供有关解决MO问题的基础知识。 重点将放在智能元启发式方法(进化算法或基于群的技术)上。 与传统的数学编程方法相反,我们将鼓励这些技术的使用。前者更适合于通用的MO问题,尤其是在事先不了解有关目标的优先级或优先级的信息时,以及当我们试图为DM提供各种替代解决方案时。 因此,我们的重点将放在有效生成帕累托前沿的技术上。 本章给出了MO优化的一般表述,介绍了帕累托最优性概念,并给出了在电力系统领域以MO问题为例的解决方案。
2. 多目标优化
multi objective optimization:
MO优化的目的是找到一组可接受的解决方案,并将其提供给DM,然后由DM选择。 在DM搜索之前或之后指定的其他约束条件或准则可以帮助指导,完善或缩小搜索范围,但我们将研究DM没有先验信息的一般情况。
2.1 简单例子
sample example:
考虑确定最有效的运输方式的问题。 假设使用两个标准来确定该效率:(a)一天所覆盖的距离,以及(b)该过程中使用的能量。 考虑以下运输方式:步行,骑自行车,骑牛,汽车,摩托车,马,飞机,火箭,气球,船和小型摩托车。
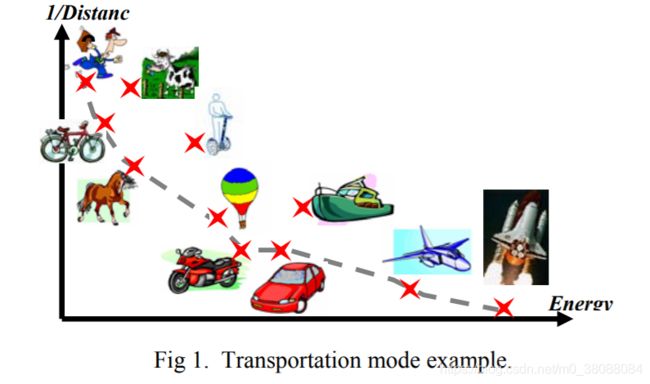
常识可用于获取所有可能的解决方案。 例如,普通汽车将比普通摩托车需要更多的燃料,但是汽车可以行驶更长的距离。 同样,在给定相同食物量的情况下,通常可以预期,牛比马的距离小。
2.2 多目标优化的通用公式
需要优化N个目标的一般MO问题可以表述为:
最小化
y → = F → ( x → ) = [ f 1 ( x → ) , f 2 ( x → ) , . . . , f N ( x → ) ] T \mathop y \limits^{\rightarrow}=\mathop F \limits^{\rightarrow}(\mathop x \limits^{\rightarrow})=[f_1(\mathop x\limits^{\rightarrow}),f_2(\mathop x\limits^{\rightarrow}),...,f_N(\mathop x\limits^{\rightarrow})]^T y→=F→(x→)=[f1(x→),f2(x→),...,fN(x→)]T
约束条件:
g j ( x → ) ≤ 0 , j = 1 , 2 , . . . , M g_j(\mathop x\limits^{\rightarrow})\leq0,j=1,2,...,M gj(x→)≤0,j=1,2,...,M
where:
x → = [ x 1 , x 2 , . . . , x P ] T ∈ Ω \mathop x\limits^{\rightarrow}=[x_1,x_2,...,x_P]^T\in \Omega x→=[x1,x2,...,xP]T∈Ω
y → \mathop y\limits^{\rightarrow} y→是目标向量, g j g_j gj代表约束, x → \mathop x\limits^{\rightarrow} x→是P维向量代表了参数空间 Ω \Omega Ω的可行解。由目标向量跨越的空间称为目标空间。 满足约束的目标向量的子空间称为可行空间。
utopian solution是针对所有目标的最佳解决方案:
x 0 → ∗ ∈ Ω : ∀ x → ∈ Ω , f i ( x 0 → ∗ ) ≤ f i ( x → ) {\mathop {x_0}\limits^{\rightarrow}}^*\in\Omega:\forall \mathop x\limits^{\rightarrow}\in\Omega,f_i({\mathop {x_0}\limits^{\rightarrow}}^*)\leq f_i(\mathop x\limits^{\rightarrow}) x0→∗∈Ω:∀x→∈Ω,fi(x0→∗)≤fi(x→) f o r i ∈ { 1 , 2 , . . . , N } for\quad i \in\{1,2,...,N\} fori∈{1,2,...,N}
对于N=1,多目标优化问题变成了单目标优化问题。在那种情况下,utopian solution就是全局最优。
当N>1时,由于个体目标函数 { f i } \{f_i\} {fi}通常是冲突的,因此通常不存在utopian solution。相反,存在一组可能无法计数的解决方案,即所谓的非支配解决方案(nondominated solutions)(对于这些目标,如果不降低至少另一个目标,则无法改善目标),它们表示目标之间的不同折衷或折衷。
2.3 帕累托最优概念
Pareto optimality Concepts:
为了比较MO问题的候选解,通常使用Pareto优势(Pareto dominance)和Pareto最优性(Pareto optimality)的概念。 这些概念最初是由弗朗西斯·伊西德罗(Francis Ysidro)提出的,然后由维尔弗雷多·帕累托(Vilfredo Pareto)推广。如果没有其他解决方案可以改善至少一个目标而又不降低任何其他目标,则该解决方案属于Pareto集。
通常的,说一个决策向量 u → = [ u 1 , u 2 , . . . , u P ] T {\mathop u\limits^{\rightarrow}}=[u_1,u_2,...,u_P]^T u→=[u1,u2,...,uP]T帕累托优势于Pareto dominance一个决策向量 v → = [ v 1 , v 2 , . . . , v P ] T {\mathop v\limits^{\rightarrow}}=[v_1,v_2,...,v_P]^T v→=[v1,v2,...,vP]T,当且仅当:
∀ i ∈ { 1 , 2 , . . . , N } , f i ( u → ) ≤ f i ( v → ) \forall i\in \{1,2,...,N\},f_i ({\mathop u\limits^{\rightarrow}})\leq f_i({\mathop v\limits^{\rightarrow}}) ∀i∈{1,2,...,N},fi(u→)≤fi(v→) a n d ∃ j ∈ { 1 , 2 , . . . , N } : f i ( u → ) < f i ( v → ) and \quad \exists j\in \{1,2,...,N\}:f_i ({\mathop u\limits^{\rightarrow}})
在MO优化的情况下,使用Pareto优势对决策向量进行比较和排名: u → {\mathop u\limits^{\rightarrow}} u→在帕累托意义上优于 v → {\mathop v\limits^{\rightarrow}} v→意味着对于所有目标 F → ( u → ) {\mathop F\limits^{\rightarrow}} ({\mathop u\limits^{\rightarrow}}) F→(u→)比 F → ( v → ) {\mathop F\limits^{\rightarrow}} ({\mathop v\limits^{\rightarrow}}) F→(v→)好,至少存在一个目标函数使得 F → ( u → ) {\mathop F\limits^{\rightarrow}} ({\mathop u\limits^{\rightarrow}}) F→(u→)严格优于 F → ( v → ) {\mathop F\limits^{\rightarrow}} ({\mathop v\limits^{\rightarrow}}) F→(v→)
当且仅当不存在其他解优于解 a → {\mathop a\limits^{\rightarrow}} a→,我们称这个解被称为帕累托最优。换句话说,在不影响至少另一个目标的情况下,不能在其中一个目标中改进解决方案 a → {\mathop a\limits^{\rightarrow}} a→。对应的目标向量 F → ( a → ) {\mathop F\limits^{\rightarrow}} ({\mathop a\limits^{\rightarrow}}) F→(a→)被称之为帕累托最优向量,pareto最优解又称非支配解、非占优解。帕累托最优解集合叫做pareto最优解集。相应的目标向量在Pareto前沿。 通常不可能提出帕累托前沿的分析表达式。
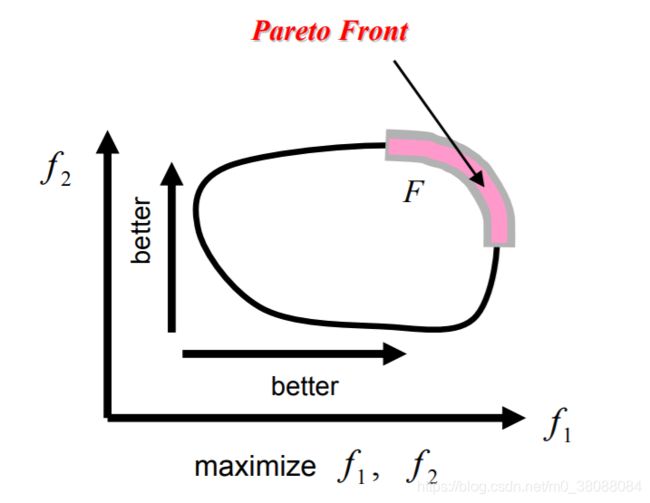
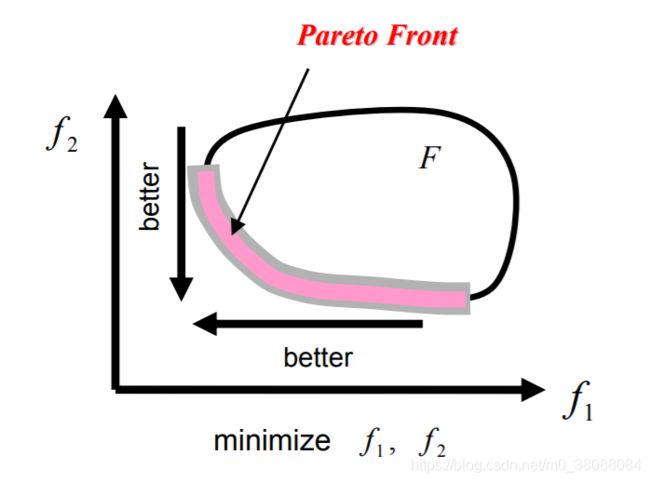
上图是两个目标函数的帕累托前沿的插图
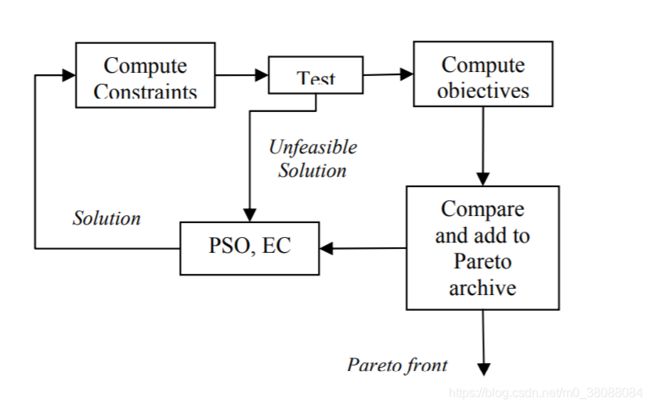
三、解决方法
solution approaches:
有几种解决MO问题的方法。 经典方法包括将MO问题转换为SO问题,然后可以使用传统的标量优化技术来解决。 由于这些方法大多数都假设来自DM的先验信息(或者按照重要性对目标进行排名,或者指示目标最佳值),因此这些技术旨在寻找一种唯一解,这个解最能满足DM提供的标准和附加信息(偏好)。
第二类技术,尽管提早提出,但由于计算能力的提高和基于人口的元启发式算法的发展,直到最近才使用。这些技术旨在通过分别优化所有目标来直接确定帕累托前沿。 其中一些技术明确使用了帕累托排名。 这些技术对于现实生活中的问题特别有利,特别是在电力系统中出现的问题,因为它们向DM提出了所有可能的目标,或者至少在目标之间进行了广泛的权衡。 这使他们能够做出明智的决定。
3.1 经典方法
classical methods:
经典方法包括通过汇总目标函数或优化一个目标并将其他目标视为约束将MO问题转换为SO问题。然后可以使用传统的标量值优化技术解决SO问题。这些技术旨在找到一个单一的解决方案,并且对于事先了解有关目标的优先信息的情况而言,是理想的选择。修改聚类参数,解决新建的SO问题去近似非支配前沿。
3.1.1 权重聚合
weighted aggregation:
加权聚合方法是效用函数(utility function)方法的一种特殊情况,该函数通过将函数运算符应用于目标向量将MO问题转换为SO问题。 DM设计此功能来捕获他的喜好。 一个简单而流行的效用函数是目标的线性组合。
最小化 Z = ∑ j = 1 N w j f j ( x → ) Z=\sum \limits_{j=1}^N w_jf_j({\mathop x\limits^{\rightarrow}}) Z=j=1∑Nwjfj(x→) with w j > 0 w_j>0 wj>0 and ∑ j = 1 N w j = 1 \sum \limits_{j=1}^Nw_j=1 j=1∑Nwj=1
例如,权重(wj)可以指示DM对目标j的相对重要性,并且必须事先为k个目标中的每一个指定。 无法在SO优化过程中确定wj的最佳值。 解决此SO问题产生的单个结果与权重的选择一样好。
没有事先的信息,选择权重可能会成问题。 在此方法的一种变体中,称为动态加权聚合(DWA:dynamic
weighted aggregation )权重是递增变化的。对于每个新的权重组合,解决问题都产生新的折衷解决方案。尽管易于实施,但该方法通常不会产生非主导的前部,并且还会错过边界的凹入部分。 此外,难以控制帕累托前沿的多样性。
3.1.2 目标规划
goal programming:
上述技术的一种变化是目标规划,旨在最大程度地减少与预定目标的偏差。
minimize Z = ∑ j = 1 N w j ∣ f j ( x → ) − T j ∣ Z=\sum\limits_{j=1}^Nw_j|f_j(\mathop x\limits^\rightarrow)-T_j| Z=j=1∑Nwj∣fj(x→)−Tj∣
T j T_j Tj是第j个目标函数的目标值, w j w_j wj是优先性。与加权聚合方法一样,主要缺点是需要先验信息(优先级和目标)。
3.1.3 ε约束
ε-constraint:
该方法旨在根据一个目标的优化发现帕累托最优解,若能够确定一个主要的目标,例如f1(x),同时将其他目标视为受某个范围 ϵ i \epsilon_i ϵi的约束。针对不同的 ϵ i \epsilon_i ϵi值反复解决该问题,以生成整个Pareto集。
minimize f k ( x → ) , x → ∈ Ω f_k(\mathop x\limits^\rightarrow),\mathop x\limits^\rightarrow \in \Omega fk(x→),x→∈Ω,约束条件 f i ( x → ) ≤ ϵ i f_i(\mathop x\limits^\rightarrow)\leq \epsilon_i fi(x→)≤ϵiand g j ( x → ) ≤ 0 g_j(\mathop x\limits^\rightarrow)\leq0 gj(x→)≤0其中 i = 1 , 2 , . . . . , N ; i ≠ k , j = 1 , 2 , . . . , M i=1,2,....,N;i\neq k,j=1,2,...,M i=1,2,....,N;i=k,j=1,2,...,M
这是一种相对简单的技术,但计算量很大。 此外,找到的解决方案不一定在全局范围内不受支配。
3.1.4 经典方法论
discussion on classical methods:
大多数传统方法都试图通过合并来自DM的优先信息来简化决策过程,并且旨在根据DM信息找到代表最佳折衷方案的最佳解决方案。通过修改聚合参数(权重或目标水平)后基本上重复求解过程,此类技术可以近似帕累托前沿。前沿获取的局部非支配解不一定必须是全局非支配解。此外,前沿解的分布依赖单目标优化求解器的效率。尽管该技术实施起来相对简单,但它们大多效率低下,有时对帕累托前沿的形状敏感。
3.2 智能技术
intelligent techniques:
与基于聚合的技术相比,一些智能技术通过同时优化单个目标而直接产生帕累托前沿。 计算的进步和基于人口的元启发式算法的发展促进了近年来这些方法的兴起。 基于总体的算法的优势在于可以在单次迭代中评估多个潜在解决方案。
此外,它们为决策者提供了更大的灵活性,主要是在没有可用先验信息的情况下(如大多数现实生活中的MO问题)。 然而,挑战在于如何引导搜索朝着帕累托最优集,以及如何保持多样性以防止过早收敛。
进化计算模拟生物进化过程。代表不同解决方案的种群正在不断发展,以寻找最佳解决方案。选择最适者,进行突变和交叉操作,从而产生了新一代(后代)。这些方法包括遗传算法(GA),进化算法(EA)和进化策略(ES),其区别仅在于适应性选择,变异和交叉操作的执行方式。进化技术已成功应用于各种SO优化,尤其是那些目标函数表现不佳(不可微,不连续和/或没有解析公式)的技术。它们通常出现在上一节介绍的传统技术的嵌入式优化步骤中。 应避免在这些基于混合进化算法的技术与本节中提出的帕累托有效解决方案的技术之间产生混淆。
3.2.1 非基于Pareto的方法:矢量评估遗传算法(VEGA)
Non-Pareto-Based Approach:Vector Evaluated Genetic Algorithm:
Schaffer的向量评估遗传算法(VEGA)是一种非基于Pareto的技术,仅在执行选择步骤的方式上与传统遗传算法不同。 在每一代,将种群划分为相等大小的子集,子集数量和目标函数的个数一致,并为每个目标函数选择最适合的个体。 然后执行常规的变异和交叉操作以获得下一代。
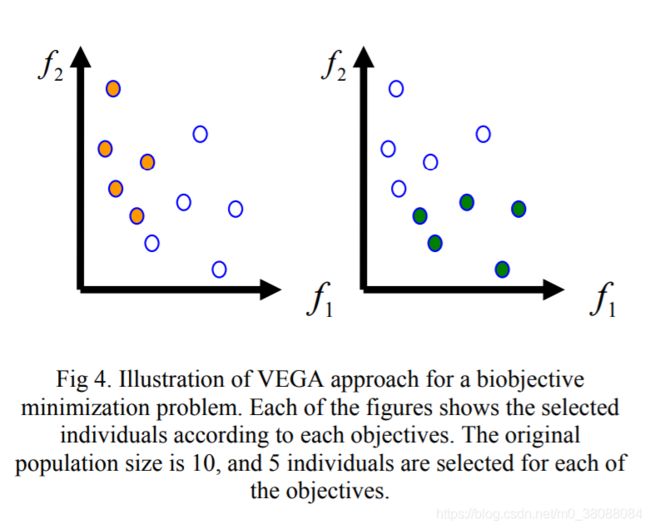
图中有两个目标,每个图都显示了根据每个目标选择的个人。 原始人口规模为10,并且为每个目标选择5个人。
VEGA算法易于实现, 但是,它遭受了物种形成问题(在目标之一上表现出色的物种进化)的困扰。 这会导致算法无法生成折衷解(这些解在一个目标上是最佳的,但在帕累托意义上不一定是最佳的)。 另外,该算法容易受到帕累托前沿形状的影响。
3.2.2 基于帕累托的方法
Pareto-based approaches:
此类别中的进化算法明确使用帕累托排名,目的是确定个体复制的可能性。基本思想是在人口中找到非支配个体的集合。这些被赋予最高等级,并从进一步的竞争中被淘汰。然后,对其余个体重复此过程,直到对整个人口进行排名并分配适合度值。结合基于Pareto的适应度分配,使用了一种niching机制(niching mechanism)来防止算法收敛到Pareto前沿的单个区域。一种称为共享的流行niching技术包括调节由目标向量或决策向量跨越的超空间中解的密度。以下介绍的方案本质上不同,不同于在EA的选择步骤之前确定个体的适应性值的方式。共享通常用于适应度值的计算中。 然后执行变异和交叉操作以获得下一代个体。
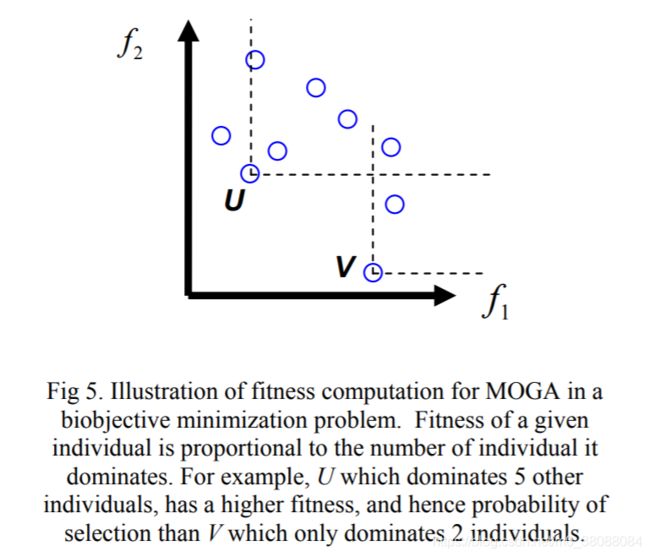
一种简单有效的方法是多目标遗传算法(MOGA)。 一个人的适应度值与其主导的其他人的数量成正比,如图所示。 可以在目标空间或决策空间中执行niching。
另一个版本是非支配排序遗传算法(NSGA),它使用分层分类技术。 所有非支配的个体都被分配了相同的适应度值,并且在决策变量空间中应用了共享。 对于剩余的个体重复此过程,并逐渐将较低的适应度值分配给非支配的个体。
在Nichoed Pareto遗传算法(NPGA)中,不是双边直接比较,两个个体和比较集(整个群体的10%)进行比较。当一个候选者由该集合支配而另一个则不是时,则选择后者。 如果两个候选人都被支配,则采用适应度共享来决定选择。 NPGA引入了一个新变量(比较集的大小),但计算速度比以前的技术快,因为选择步骤仅适用于总体的子集。