Pytorch DDP原理(第一篇)
一. 分布式编程
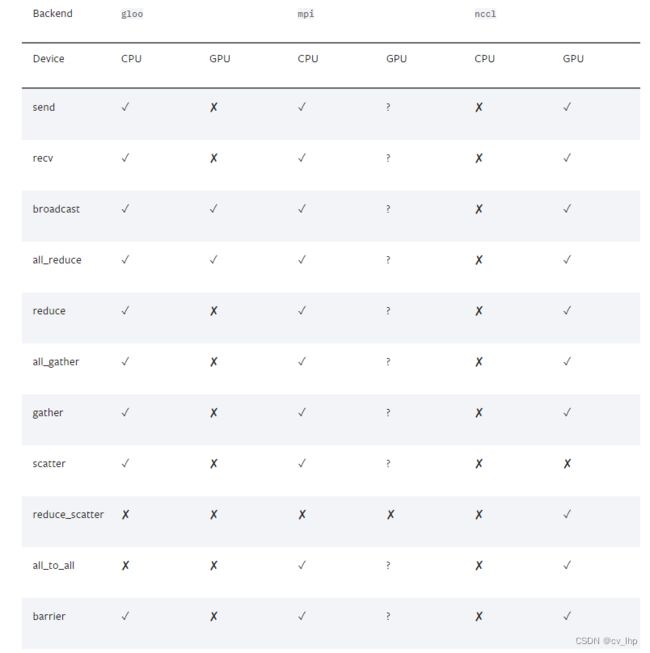
一个分布式系统,相对于单机系统,其最大的特征就是,其数据、处理是分布在不同地方的。与此相伴的是,各节点间有交换数据的需求,为此需要定义交换数据的规范、接口。在此基础上,才能构建起分布式计算的大框架。比如很有名的google大数据三驾马车之一的map-reduce概念,简要地描述,就是将数据分开成N份map到N个地方,并行进行处理;处理完成后,再将结果reduce到一起。为了满足分布式编程的需求,PyTorch在torch.distributed中提供了一些分布式基本接口,如下图所示。
1.1 all_reduce的实现
- 所谓的reduce,就是不同节点各有一份数据,把这些数据汇总到一起。在这里,我们规定各个节点上的这份数据有着相同的shape和data type,并规定汇总的方法是相加。简而言之,就是把各个节点上的一份相同规范的数据相加到一起。
- 所谓的all_reduce,就是在reduce的基础上,把最终的结果发回到各个节点上。
- 具体的allreduce实现,要看具体的backend。流行的GPU backend NCCL,all_reduce的实现就是使用了ring思想。
DDP利用all_reduce,来进行不同进程上的梯度的平均操作。PyTorch提供了几个all_reduce的版本,下面这个就是Ring-Reduce版本:
def all_reduce(tensor,
op=ReduceOp.SUM,
group=group.WORLD,
async_op=False):
"""
Reduces the tensor data across all machines in such a way that all get
the final result.
After the call ``tensor`` is going to be bitwise identical in all processes.
Arguments:
tensor (Tensor): Input and output of the collective. The function
operates in-place.
op (optional): One of the values from
``torch.distributed.ReduceOp``
enum. Specifies an operation used for element-wise reductions.
group (ProcessGroup, optional): The process group to work on
async_op (bool, optional): Whether this op should be an async op
Returns:
Async work handle, if async_op is set to True.
None, if not async_op or if not part of the group
"""
1.2 PyTorch 数据结构基础
DDP到底和什么数据结构打交道呢?我们要首先解决这些问题:
- 我们知道,DDP下各进程不同步参数而是同步参数的变化量,所以各进程的模型的状态同一性是非常重要的。那么模型的状态由什么构成呢?
- DDP是怎么做到,无论是什么模型进来,一个简单的model = DDP(model)就可以解决问题呢?它的逻辑是怎么嵌入到模型中的?
1.2.1 buffer
解决第一个问题,需要了解buffer的概念。
在PyTorch中,所有的模型都会继承module类。可以说,一个CNN模型,其就是由一系列module组合而成的。要了解模型,就必须从module下手。下面是module的初始化代码,可以看到,它定义了一系列变量。可以说,这些变量就组成了一个module的基本要素,如下代码。
# torch.nn.modules.py. line 71. Class module:
def __init__(self):
"""
Initializes internal Module state, shared by both nn.Module and ScriptModule.
"""
torch._C._log_api_usage_once("python.nn_module")
self.training = True
self._parameters = OrderedDict()
self._buffers = OrderedDict()
self._backward_hooks = OrderedDict()
self._forward_hooks = OrderedDict()
self._forward_pre_hooks = OrderedDict()
self._state_dict_hooks = OrderedDict()
self._load_state_dict_pre_hooks = OrderedDict()
self._modules = OrderedDict()
总的来说,module的基本要素可以分为2组,一组是状态,一组是各种各样的hooks。状态有以下4个东西:
- self.training
指的是网络是否在训练状态中。这是个非常宏观的状态,大家都知道这个是啥,可以略过。 - self._modules
modules是下属的模块,相当于迭代地定义了self.trainig, self._modules, self._parameters等一系列变量 - self._parameters
指的就是网络的参数 - self._buffers
不是参数,但也对网络很重要,会被持久化保存的数据。比如BatchNorm中的moving mean and variance就是buffer,其优化不是通过梯度反向传播而是通过其他途径。
从本质上讲,当一个模型的网络结构被定义后,其状态就是由parameter和buffer的迭代组合表示的。当我们保存模型,调用model.staic_dict()的时候,我们同时会得到模型的parameter和buffer;也就是说,在DDP中,如果我们要在不同进程中维持相同的状态,我们不光要传递parameter的梯度,也要传递buffer。事实上,DDP就是这么做的。当每次网络传播开始前,其都会把master节点上的buffer广播给其他节点,维持状态的统一。
1.2.2 hook
回答第二个问题,需要了解hook的概念。
hook的中文是钩子,是一种技术概念。用形象的话讲,hook提供了这么一种机制:程序提供hook接口,用户可以写一个hook函数,然后钩在hook接口,即程序的主体上从而可以插入到中间执行。DDP使用hook技术把自己的逻辑插入到module的训练过程中去。
在模型训练时,各个进程通过一种叫Ring-Reduce的方法与其他进程通讯,从而获得所有进程的梯度;
那么,Ring-Reduce机制是怎么插入到module中去的呢?这归功于PyTorch提供了很多个hook接口!
其中,就有一个是,parameter在反向梯度计算结束后提供了一个hook接口。DDP把Ring-Reduce的代码写成一个hook函数,插入到这里。每次parameter的反向梯度计算结束后,程序就会调用这个hook函数,从而开启Ring-Reduce流程。因为所有模型都用到parameter,所以DDP模型用hook函数就解决了所有模型的梯度平均问题了!
torch.nn.parameter是torch.Tensor上的一层概念封装,hook机制也是定义在torch.Tensor中的。DDP的关键代码(即梯度平均)是用C++实现的。但是,在C++、python代码中Tensor都给出了hook接口,实现相似的功能。所以看下Tensor的python hook接口的文档,来理解下hook这个概念。
# line 200. Class Tensor.
def register_hook(self, hook):
r"""Registers a backward hook.
The hook will be called every time a gradient with respect to the
Tensor is computed. The hook should have the following signature::
hook(grad) -> Tensor or None
The hook should not modify its argument, but it can optionally return
a new gradient which will be used in place of :attr:`grad`.
This function returns a handle with a method ``handle.remove()``
that removes the hook from the module.
Example::
>>> v = torch.tensor([0., 0., 0.], requires_grad=True)
>>> h = v.register_hook(lambda grad: grad * 2) # double the gradient
>>> v.backward(torch.tensor([1., 2., 3.]))
>>> v.grad
2
4
6
[torch.FloatTensor of size (3,)]
>>> h.remove() # removes the hook
"""
二. DDP流程
2.1 准备阶段
- 环境准备(就是init_process_group这一步)。各个进程会在这一步,与master节点进行握手,建立连接。注意:如果连接上的进程数量不足约定的 word_size,进程会一直等待。也就是说,如果你约定了world_size=64,但是只开了6台8卡机器,那么程序会一直暂停在这个地方。
- DDP初始化(也就是model = DDP(model)这一步)
- 把parameter,buffer从master节点传到其他节点,使所有进程上的状态一致。注意:DDP通过这一步保证所有进程的初始状态一致。所以,请确保在这一步之后,你的代码不会再修改模型的任何东西了,包括添加、修改、删除parameter和buffer!
- 如果有每个节点有多卡,则在每张卡上创建模型(类似DP)
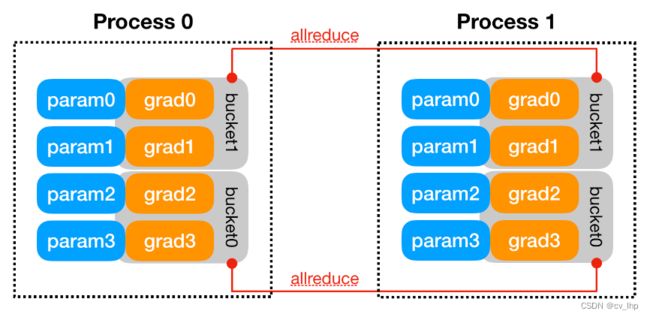
- 把parameter进行分组,每一组称为一个bucket。临近的parameter在同一个bucket。
注意:这是为了加速,在梯度通讯时,先计算、得到梯度的bucket会马上进行通讯,不必等到所有梯度计算结束才进行通讯。 - 创建管理器reducer,给每个parameter注册梯度平均的hook。这一步的具体实现是在C++代码里面的,即reducer.h文件。
- 为可能的SyncBN层做准备
2.2 正式训练阶段
在每个step中,DDP模型都会做下面的事情,如下图所示:
- 采样数据,从dataloader得到一个batch的数据,用于当前计算(for data, label in dataloader)。
因为我们的dataloader使用了DistributedSampler,所以各个进程之间的数据是不会重复的。如果要确保DDP性能和单卡性能一致,这边需要保证在数据上,DDP模式下的一个epoch和单卡下的一个epoch是等效的。 - 进行网络的前向计算(prediction = model(data))
- 同步各进程状态:同步各进程之间的buffer。对单进程多卡复制模式,要在进程内同步多卡之间的parameter和buffer
- 接下来才是进行真正的前向计算
- (可能)当DDP参数find_unused_parameter为true时,其会在forward结束时,启动一个回溯,标记出所有没被用到的parameter,提前把这些设定为ready。注意:find_unused_parameter的默认值是false,因为其会拖慢速度。
- 计算梯度(loss.backward())
- reducer外面:各个进程各自开始反向地计算梯度。梯度是反向计算的,所以最后面的参数反而是最先得到梯度的。
- reducer外面:当某个parameter的梯度计算好了的时候,其之前注册的grad hook就会被触发,在reducer里把这个parameter的状态标记为ready。
- reducer里面:当某个bucket的所有parameter都是ready状态时,reducer会开始对这个bucket的所有parameter都开始一个异步的all-reduce梯度平均操作。
bucket的执行过程也是有顺序的,其顺序与parameter是相反的,即最先注册的parameter的bucket在最后面。所以,我们在创建module的时候,请务必把先进行计算的parameter注册在前面,后计算的在后面。不然,reducer会卡在某一个bucket等待,使训练时间延长!所谓的参数注册,其实就是创建网络层。也就是要求按照网络计算顺序,依次创建网络层。 - reducer里面:当所有bucket的梯度平均都结束后,reducer才会把得到的平均grad结果正式写入到parameter.grad里面。
- 优化器optimizer应用gradient,更新参数(optimizer.step())。这一步,是和DDP没关系的。
虽然DDP的实现代码与optimizer没有关系,但是关于optimizer有个额外的东西需要说明。更新后的参数最终能在各进程间保持一致,是由以下因素保证的:
- 参数初始值相同
- 参数更新值相同,更新值相同由optimizer初始状态相同和每次opimizer.step()时的梯度相同保证的。
因为optimizer和DDP是没有关系的,所以optimizer初始状态的同一性是不被DDP保证的!
大多数官方optimizer,其实现能保证从同样状态的model初始化时,其初始状态是相同的。所以这边我们只要保证在DDP模型创建后才初始化optimizer,就不用做额外的操作。但是,如果自定义optimizer,则需要你自己来保证其统一性!
从代码中看出optimizer确实是在DDP之后定义的。这个时候的模式已经是被初始化为相同的参数,所以能够保证优化器的初始状态是相同的。
# 新增:构造DDP model
model = DDP(model, device_ids=[local_rank], output_device=local_rank)
# 优化器:要在构造DDP model之后,才能初始化optimizer。
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.8)
三. 为什么速度没怎么提升/性能下降
加入了DDP后,为什么速度没怎么提升/性能下降了呢?下面准备了一个check list。
- 是否遵循了“单进程单卡”这样的最佳工程实践?“单进程多卡复制模式”在速度上不是最优的,而且不被PyTorch社区优先支持,避免使用。
- 是否使用了默认的NCCL后端?用就完事。
- 各进程的模型是否相同?用户必须保证,不同进程里的模型都是相同结构的;保证parameter(网络层)的创建顺序是一致的。
- 模型的parameter创建顺序是否与真实计算顺序一致?这涉及到bucket的通讯效率优化。bucket的执行过程也是有顺序的,其顺序与parameter是相反的,即最先注册的parameter的bucket在最后面。所以,我们在创建module的时候,请务必把先进行计算的parameter注册在前面,后计算的在后面。不然,reducer会卡在某一个bucket等待,使训练时间延长!所谓的参数注册,其实就是创建网络层。也就是要求按照网络计算顺序,依次创建网络层。
- 产生DDP模型后,是否手动动了它的参数?不允许在产生DDP后,新增、减少、随机修改、替换参数,会造成梯度reduce出错、各进程间的参数不相同、丢失hook机制。
- DDP模式下的一个epoch的数据和单卡下的一个epoch的数据是否是等效的?实际上,n卡的DDP模式,理论上可以等价于n次gradient accumulation的单卡模式。所以确保你的数据,也是这样的。如果出现性能下降,切记数据是最有可能出现问题的地方!
- 是否保证初始状态的同一性?parameter、buffer初始状态同一性以及optimizer初始状态同一性。
四. DistributedSampler机制
DDP的DistributedSampler机制给不同进程分配数据集的不重叠、不交叉部分。那么问题来了,每次epoch我们都会随机shuffle数据集,那么,不同进程之间要怎么保持shuffle后数据集的一致性呢?DistributedSampler的实现方式是,不同进程会使用一个相同的随机数种子,这样shuffle出来的东西就能确保一致。
具体实现上,DistributedSampler使用当前epoch作为随机数种子,从而使得不同epoch下有不同的shuffle结果。所以,记得每次epoch开始前都要调用一下sampler的set_epoch方法,让不同的epoch的数据集产生shuffle的效果,这样才能让数据集随机shuffle起来。
DistributedSampler的核心源代码如下:
# line 56
def __iter__(self):
# deterministically shuffle based on epoch
g = torch.Generator()
g.manual_seed(self.epoch)
if self.shuffle:
indices = torch.randperm(len(self.dataset), generator=g).tolist()
else:
indices = list(range(len(self.dataset)))
# add extra samples to make it evenly divisible
indices += indices[:(self.total_size - len(indices))]
assert len(indices) == self.total_size
# subsample
indices = indices[self.rank:self.total_size:self.num_replicas]
assert len(indices) == self.num_samples
return iter(indices)
# line 79
def set_epoch(self, epoch):
self.epoch = epoch
五. 一份能直接运行的DDP代码模板
################
## main.py文件
import argparse
from tqdm import tqdm
import torch
import torchvision
import torch.nn as nn
import torch.nn.functional as F
# 新增:
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
### 1. 基础模块 ###
# 假设我们的模型是这个,与DDP无关
class ToyModel(nn.Module):
def __init__(self):
super(ToyModel, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
# 假设我们的数据是这个
def get_dataset():
transform = torchvision.transforms.Compose([
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
])
my_trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
# DDP:使用DistributedSampler,DDP帮我们把细节都封装起来了。
# 用,就完事儿!sampler的原理,第二篇中有介绍。
train_sampler = torch.utils.data.distributed.DistributedSampler(my_trainset)
# DDP:需要注意的是,这里的batch_size指的是每个进程下的batch_size。
# 也就是说,总batch_size是这里的batch_size再乘以并行数(world_size)。
trainloader = torch.utils.data.DataLoader(my_trainset,
batch_size=16, num_workers=2, sampler=train_sampler)
return trainloader
### 2. 初始化我们的模型、数据、各种配置 ####
# DDP:从外部得到local_rank参数
parser = argparse.ArgumentParser()
parser.add_argument("--local_rank", default=-1, type=int)
FLAGS = parser.parse_args()
local_rank = FLAGS.local_rank
# DDP:DDP backend初始化
torch.cuda.set_device(local_rank)
dist.init_process_group(backend='nccl') # nccl是GPU设备上最快、最推荐的后端
# 准备数据,要在DDP初始化之后进行
trainloader = get_dataset()
# 构造模型
model = ToyModel().to(local_rank)
# DDP: Load模型要在构造DDP模型之前,且只需要在master上加载就行了。
ckpt_path = None
if dist.get_rank() == 0 and ckpt_path is not None:
model.load_state_dict(torch.load(ckpt_path))
# DDP: 构造DDP model
model = DDP(model, device_ids=[local_rank], output_device=local_rank)
# DDP: 要在构造DDP model之后,才能用model初始化optimizer。
optimizer = torch.optim.SGD(model.parameters(), lr=0.001)
# 假设我们的loss是这个
loss_func = nn.CrossEntropyLoss().to(local_rank)
### 3. 网络训练 ###
model.train()
iterator = tqdm(range(100))
for epoch in iterator:
# DDP:设置sampler的epoch,
# DistributedSampler需要这个来指定shuffle方式,
# 通过维持各个进程之间的相同随机数种子使不同进程能获得同样的shuffle效果。
trainloader.sampler.set_epoch(epoch)
# 后面这部分,则与原来完全一致了。
for data, label in trainloader:
data, label = data.to(local_rank), label.to(local_rank)
optimizer.zero_grad()
prediction = model(data)
loss = loss_func(prediction, label)
loss.backward()
iterator.desc = "loss = %0.3f" % loss
optimizer.step()
# DDP:
# 1. save模型的时候,和DP模式一样,有一个需要注意的点:保存的是model.module而不是model。
# 因为model其实是DDP model,参数是被`model=DDP(model)`包起来的。
# 2. 只需要在进程0上保存一次就行了,避免多次保存重复的东西。
if dist.get_rank() == 0:
torch.save(model.module.state_dict(), "%d.ckpt" % epoch)
################
## Bash运行
# DDP: 使用torch.distributed.launch启动DDP模式
# 使用CUDA_VISIBLE_DEVICES,来决定使用哪些GPU
# CUDA_VISIBLE_DEVICES="0,1" python -m torch.distributed.launch --nproc_per_node 2 main.py
六. 相关链接
- 本文内容来自于:[原创][深度][PyTorch] DDP系列第二篇:实现原理与源代码解析
- Pytorch DDP原理(第二篇)