【Linux学习】OpenCV+ROS 实现人脸识别(Ubantu16.04)
镜像下载、域名解析、时间同步请点击 阿里云开源镜像站
前言
本文主要学习 ROS机器人操作系统 ,在ROS系统里调用 OpenCV库 实现人脸识别任务
一、环境配置
1.安装ROS
sudo apt-get install ros-kinetic-desktop-full2.摄像头调用
安装摄像头组件相关的包,命令行如下:
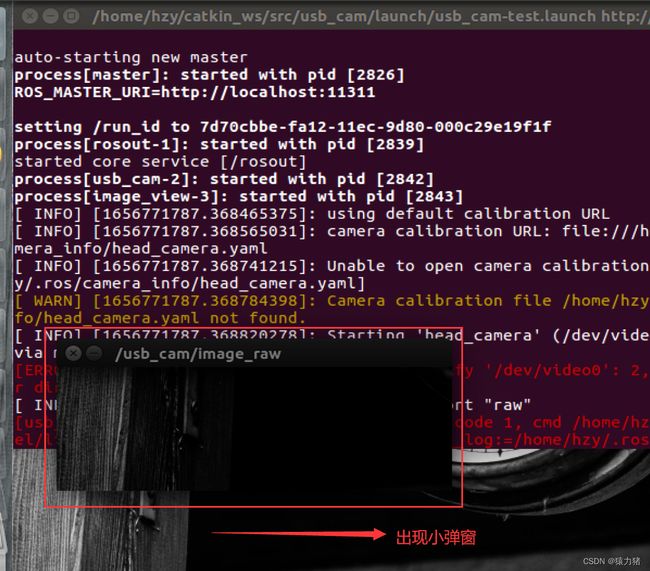
sudo apt-get install ros-kinetic-usb-cam启动摄像头,命令行如下:
roslaunch usb_cam usb_cam-test.launch调用摄像头成功,如下图所示:
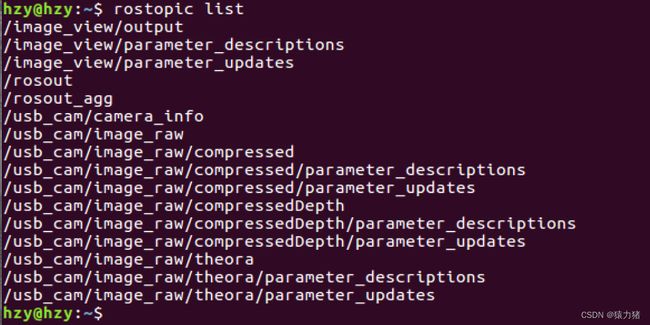
摄像头的驱动发布的相关数据,如下图所示:
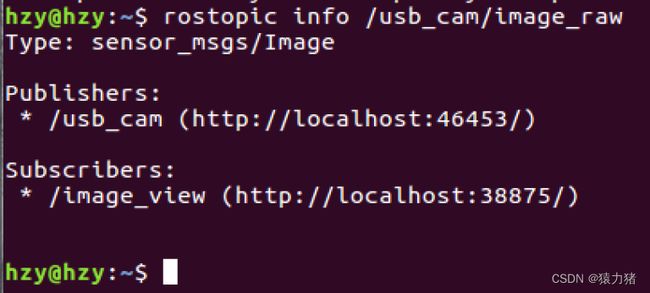
摄像头 usb_cam/image_raw 这个话题,发布的消息的具体类型,如下图所示:
那么图像消息里面的成员变量有哪些呢?
打印一下就知道了!一个消息类型里面的具体成员变量,如下图所示:
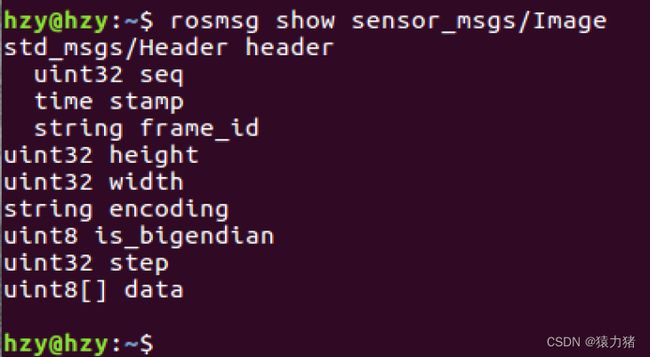
Header:很多话题消息里面都包含的
消息头:包含消息序号,时间戳和绑定坐标系
消息的序号:表示我们这个消息发布是排第几位的,并不需要我们手动去标定,每次
发布消息的时候会自动地去累加
绑定坐标系:表示的是我们是针对哪一个坐标系去发布的header有时候也不需要去配置
height:图像的纵向分辨率
width:图像的横向分辨率
encoding:图像的编码格式,包含RGB、YUV等常用格式,都是原始图像的编码格式,不涉及图像压缩编码
is_bigendian: 图像数据的大小端存储模式
step:一行图像数据的字节数量,作为数据的步长参数
data:存储图像数据的数组,大小为step×height个字节
format:图像的压缩编码格式(jpeg、png、bmp)
3.导入OpenCV

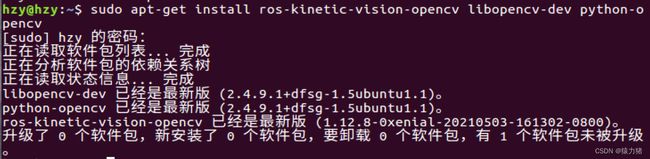
在ROS当中完成OpenCV的安装,命令行如下图所示:
sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv安装完成
二、创建工作空间和功能包
1.创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace- 创建完成工作空间后,在根目录下面,执行编译整个工作空间
cd ~/catkin_ws/
catkin_make工作空间中会自动生成两个文件夹:devel,build
devel文件夹中产生几个setup.*sh形成的环境变量设置脚本,使用source命令运行这些脚本文件,则工作空间中的环境变量得以生效
source devel/setup.sh- 将环境变量设置到/.bashrc文件中
gedit ~/.bashrc- 在打开的文件,最下面粘贴以下代码即可设置环境变量
source ~/catkin_ws/devel/setup.bash2.创建功能包
开始创建
cd ~/catkin_ws/src
catkin_create_pkg learning std_msgs rospy roscpp回到根目录,编译并设置环境变量
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.sh三、人脸识别检测相关代码
基于 Haar 特征的级联分类器检测算法
核心内容,如下所示:
- 灰阶色彩转换
- 缩小摄像头图像
- 直方图均衡化
- 检测人脸
1.python文件
face_detector.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
import cv2
import numpy as np
from sensor_msgs.msg import Image, RegionOfInterest
from cv_bridge import CvBridge, CvBridgeError
class faceDetector:
def __init__(self):
rospy.on_shutdown(self.cleanup);
# 创建cv_bridge
self.bridge = CvBridge()
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
# 获取haar特征的级联表的XML文件,文件路径在launch文件中传入
cascade_1 = rospy.get_param("~cascade_1", "")
cascade_2 = rospy.get_param("~cascade_2", "")
# 使用级联表初始化haar特征检测器
self.cascade_1 = cv2.CascadeClassifier(cascade_1)
self.cascade_2 = cv2.CascadeClassifier(cascade_2)
# 设置级联表的参数,优化人脸识别,可以在launch文件中重新配置
self.haar_scaleFactor = rospy.get_param("~haar_scaleFactor", 1.2)
self.haar_minNeighbors = rospy.get_param("~haar_minNeighbors", 2)
self.haar_minSize = rospy.get_param("~haar_minSize", 40)
self.haar_maxSize = rospy.get_param("~haar_maxSize", 60)
self.color = (50, 255, 50)
# 初始化订阅rgb格式图像数据的订阅者,此处图像topic的话题名可以在launch文件中重映射
self.image_sub = rospy.Subscriber("input_rgb_image", Image, self.image_callback, queue_size=1)
def image_callback(self, data):
# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
frame = np.array(cv_image, dtype=np.uint8)
except CvBridgeError, e:
print e
# 创建灰度图像
grey_image = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 创建平衡直方图,减少光线影响
grey_image = cv2.equalizeHist(grey_image)
# 尝试检测人脸
faces_result = self.detect_face(grey_image)
# 在opencv的窗口中框出所有人脸区域
if len(faces_result)>0:
for face in faces_result:
x, y, w, h = face
cv2.rectangle(cv_image, (x, y), (x+w, y+h), self.color, 2)
# 将识别后的图像转换成ROS消息并发布
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
def detect_face(self, input_image):
# 首先匹配正面人脸的模型
if self.cascade_1:
faces = self.cascade_1.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
# 如果正面人脸匹配失败,那么就尝试匹配侧面人脸的模型
if len(faces) == 0 and self.cascade_2:
faces = self.cascade_2.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
return faces
def cleanup(self):
print "Shutting down vision node."
cv2.destroyAllWindows()
if __name__ == '__main__':
try:
# 初始化ros节点
rospy.init_node("face_detector")
faceDetector()
rospy.loginfo("Face detector is started..")
rospy.loginfo("Please subscribe the ROS image.")
rospy.spin()
except KeyboardInterrupt:
print "Shutting down face detector node."
cv2.destroyAllWindows()2.lanuch文件
usb_cam.launch
- 摄像头启动文件
face_detector.launch
- 人脸识别启动文件
haar_scaleFactor: 1.2
haar_minNeighbors: 2
haar_minSize: 40
haar_maxSize: 60
3.CvBridge
- ROS 与 OpenCV 之间的数据连接是通过 CvBridge 来实现的
- ROS Image Message与 OpenCV Ipllmage 之间连接的一个桥梁
cv_bridge_test.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
import cv2
from cv_bridge import CvBridge, CvBridgeError
from sensor_msgs.msg import Image
class image_converter:
def __init__(self):
# 创建cv_bridge,声明图像的发布者和订阅者
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("/usb_cam/image_raw", Image, self.callback)
def callback(self,data):
# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
except CvBridgeError as e:
print e
# 在opencv的显示窗口中绘制一个圆,作为标记
(rows,cols,channels) = cv_image.shape
if cols > 60 and rows > 60 :
cv2.circle(cv_image, (60, 60), 30, (0,0,255), -1)
# 显示Opencv格式的图像
cv2.imshow("Image window", cv_image)
cv2.waitKey(3)
# 再将opencv格式额数据转换成ros image格式的数据发布
try:
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
except CvBridgeError as e:
print e
if __name__ == '__main__':
try:
# 初始化ros节点
rospy.init_node("cv_bridge_test")
rospy.loginfo("Starting cv_bridge_test node")
image_converter()
rospy.spin()
except KeyboardInterrupt:
print "Shutting down cv_bridge_test node."
cv2.destroyAllWindows()四、代码实测
1.执行命令行
分别在三个终端下运行,命令行如下:
启动摄像头
roslaunch robot_vision usb_cam.launch启动人脸识别
roslaunch robot_vision face_detector.launch打开人脸识别窗口
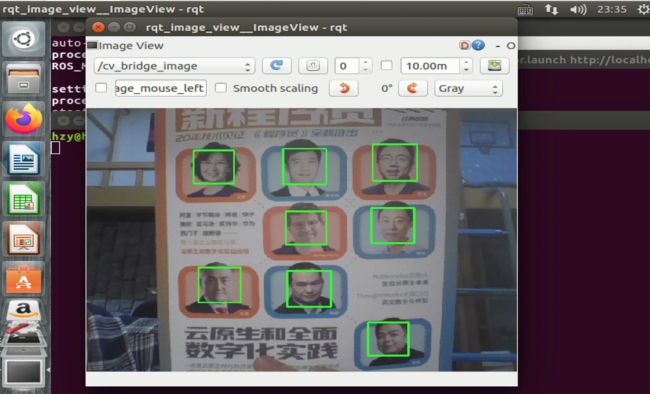
rqt_image_view2.人脸识别效果
拿了C站官方送的书来进行测试,识别的效果还是相当不错的,效果如下图所示:
五、报错解决
报错1:E:无法定位软件包 ros-kinetic-usb-cam
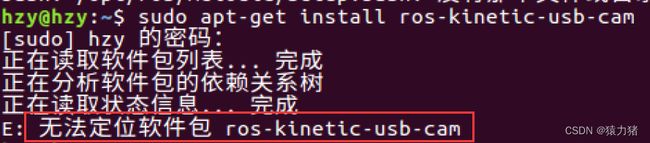
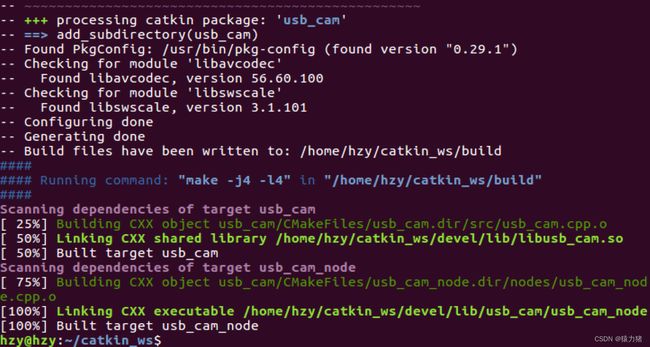
解决方法: 网上下载编译安装
$ cd catkin_ws/src
$ git clone https://github.com/bosch-ros-pkg/usb_cam.git
$ cd ~/catkin_ws
$ catkin_make
成功解决:
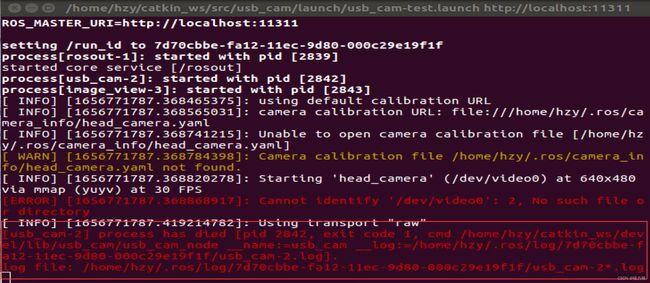
报错2:启动摄像头报错
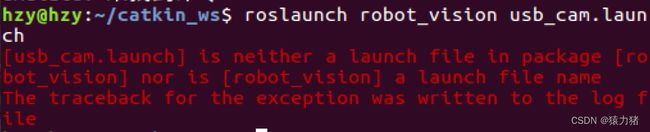
解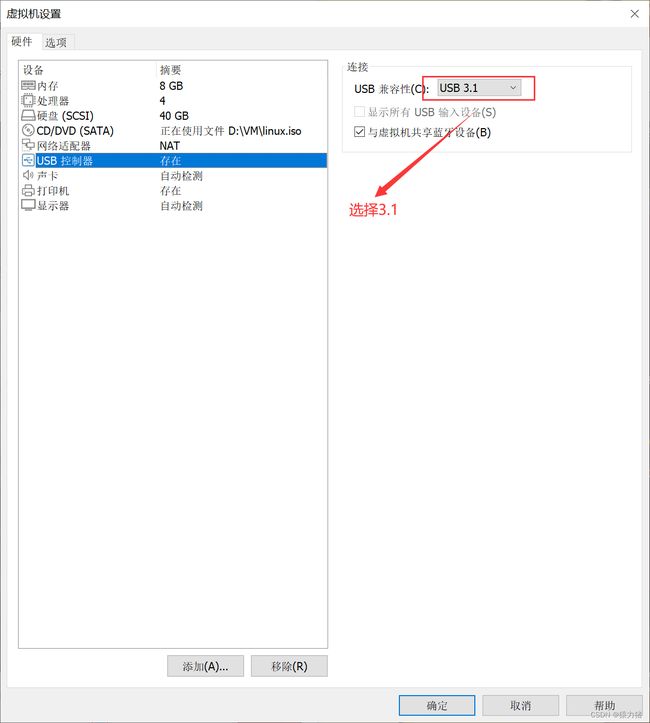 决方法:输入以下命令行,再启动摄像头
决方法:输入以下命令行,再启动摄像头
source ~/catkin_ws/devel/setup.bash成功解决:
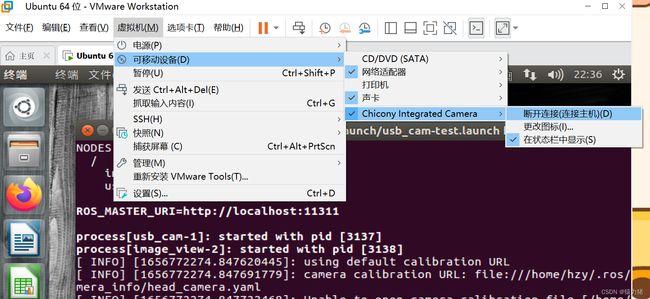
报错3:虚拟机摄像头没连接报错
解决方法:打开虚拟机设置,更改usb版本为3.1
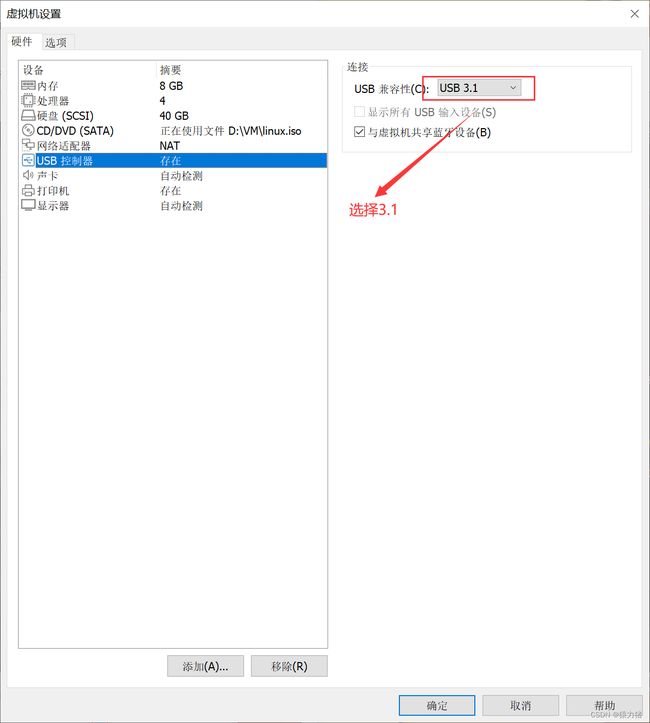
可移动设备将摄像头设置连接
六、总结
在ROS操作系统中调用 OpenCV 完成人脸识别还是比较有意思的,目前图像处理和人脸识别还是比较常用到的,本文主要记录学习过程,以及遇到的相关报错问题进行记录
如何对于特定目标的检测并显示出结果?如何优化让人脸识别的更精准?目前还在朝着这个方向进行思考和探究
原文链接:https://blog.csdn.net/m0_61745661/article/details/125578352