PPT|交通·未来第3期 《基于实时WIFI-蓝牙检测数据的交通目标定位及出行模式甄别技术》...
一、讲座信息
主题:基于实时WIFI-蓝牙检测数据的交通目标定位及出行模式甄别技术
主讲人:华南理工大学黄紫林(研三,毕业读博)
直播回放地址:暂不提供直播回放
PPT下载地址:https://github.com/JinleiZhangBJTU/Transportation_with_Machine_Learning
或公众号后台回复 “GitHub”
二、提纲
黄紫林同学的研究方向是基于WIFI的定位技术,近几年主要关注以下任务:
基于WIFI-蓝牙背景下的接受信号降噪以及测距、行人车辆定位、交通出行模式甄别。根据实际交通场景的不同,本次讲座主要涉及到三种基于WIFI- 蓝牙检测数据的技术:
(1)基于接收信号强度指示(RSSI)的信号降噪及测距技术;
(2)复杂城市道路环境下融合多传感器数据的行人/车辆定位技术;
(3)基于路侧实时WIFI-蓝牙检测数据的交通出行模式甄别技术。
三、背景
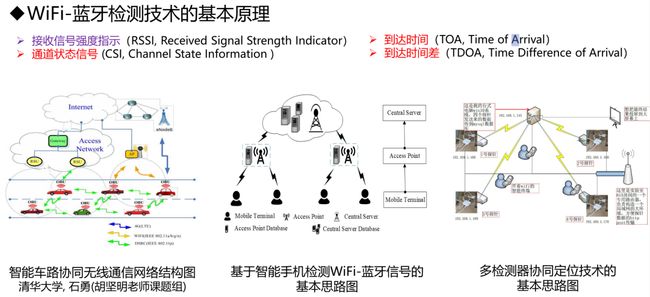
车路协同系统是目前智慧城市/智慧交通很热门的一个方向,其本质是将车载设备无法精准感知及获取的信息通过路侧感知获取,其核心是智慧公路。智慧公路通过道路上广布各式具有通信的物联网传感器、结合重点区域部署视频摄像头及车载设备,实现路、车、人的实时感知和通信。
现如今通讯波检测技术已经有了相当的应用场景:长安大学, 赵祥模、徐志刚教授课题组的泛在无线技术在智能公路的应用;Kurkcu, A.等利用WIF-蓝牙技术计算公交车站到站时间和人群密度;P. Ho 等提出的基于WIFI的人车避障技术;Wang, J.等利用WIFI检测热点区域识别,检测人群的移动,对行人轨迹进行识别;Hidayat, A.等根据WIFI检测信号对上下车人数进行识别以及Lesani, A根据WIFI-蓝牙检测对行人计数和行人模式分类。
目前智能车路协同无线通信网络主要分为3类:4G/WIFI/DSRC,后两者都是基于IEEEE 802.11通信协议,本次讲座主要讨论WIFI的定位技术,每个智能电子设备都有一个独特的硬件代码,称为MAC地址(12个字符的十六进制数字)。根据ieee802.11白皮书,支持WIFI的智能电子设备将尝试通过定期广播探测请求来连接到附近的WLAN。即使在不使用设备时,启用了WIFI的设备也会广播探测信号。此外,每个启用WIFI的智能电子设备的探测请求帧都可以被WIFI探测器捕获和存储。当在一个监控区域内布置多个检测器时,就可以利用多检测器捕捉到的信号强度信息及本身位置信息,进行协同定位。
其中基于通讯波信息数据进行室外复杂交通环境下的数据深度挖掘时,仍存以下技术难点:

①通讯波信号强度指示(RSSI)在传播过程中容易受到周边环境的影响,存在较大的波动噪声;
②复杂城市道路环境下难以提取准确的距离信息,导致较大的测距误差;
③融合多检测器检测信号数据,从中提炼移动目标的空间位置信息难度较大;
④从交通目标的动静态轨迹中,甄别移动目标交通出行方式的方法还不成熟。
四、主体内容
⑴基于接收信号强度指示(RSSI)的信号降噪及测距技术
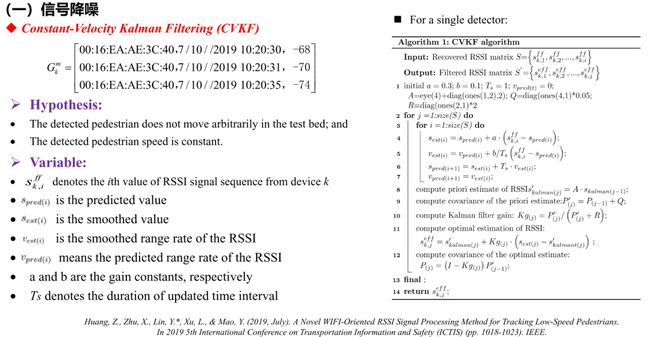
RSSI信号的衰减与距离存在一定的耦合关系,如果通过卡尔曼滤波算法进行降噪会造成数据序列中初始位置的RSSI值存在较大误差,因此考虑到交通环境中,行人或汽车运动存在特定规律,参考之前学者们提出的constant-velocity, constant-acceleration, singer acceleration model, mean-adaptive acceleration model等建模方法,设计了一种Constant Velocity-Kalman Filtering (CVKF) 融合算法对RSSI信号进行降噪。
CVKF算法的实现基于两个基本假设:1. 行人在实验区域内的运动不是随意的,而是有方向性的;2. 行人的移动速度是一个常量参数。其本质核心是在卡尔曼滤波算法中嵌入了一个速度常量算法,以解决传统卡尔曼滤波初始值敏感的问题。首先是将原始RSSI减去一个预测值,得到的差乘以一个参数,再加上原来的预测值,作为平滑后的RSSI值。
传统测距模型中对数距离路径损耗模型(Propagation Model)利用在几个观测点上获得的一些信号样本,可以对PM系数进行校准。一般来说,PM具有理想的传播效果,可以在室外宽敞的环境中在视线(LOS)场景中很好地工作。但是这个模型过于简单,在拥挤的城市道路环境中,由于摩天大楼、隧道、车辆、混凝土墙等建筑材料的信号反射、阴影和多路径过渡,无法获得准确的距离。近年,研究者提出了一些改进的方法:回归神经网络(GRNN)、多项式回归(PRM)、曲线拟合(CF)、分割拟合(SF).
本文提出的PPRM(分段多项式),基于PRM通过分段来降低由于时间长序列造成的误差,与已有的PM和PRM相比,假设RSSI-distance关系可以在不同的RSSI分段上表示为不同的n 阶多项式,并利用训练数据集对多项式系数进行校准。此外,PPRM可以自动将RSSI划分为不同的水平,从而校准一系列多项式回归函数。

⑵复杂城市道路环境下融合多传感器数据的行人/车辆定位技术
基于RSSI技术定位方法分为两种:①基于RSSI的小型区域内动静态目标指纹定位技术(Fingerprinting Localization) ,其主要研究从多个WIFI扫描器接收到的移动设备指纹与参考点(PRs) 的差异,或者同一位置出现的概率。这些方法的性能取决于单位面积采用的 参考点数量,即参考点密度。②基于RSSI的大中型区域内动静态目标复杂定位技术(Range-based Methods) 。基于距离的方法分为两个子问题:一个是使用RSS测量估计盲锚距离的测距阶段,另一个是根据距离估计计算盲节点位置的定位阶段。
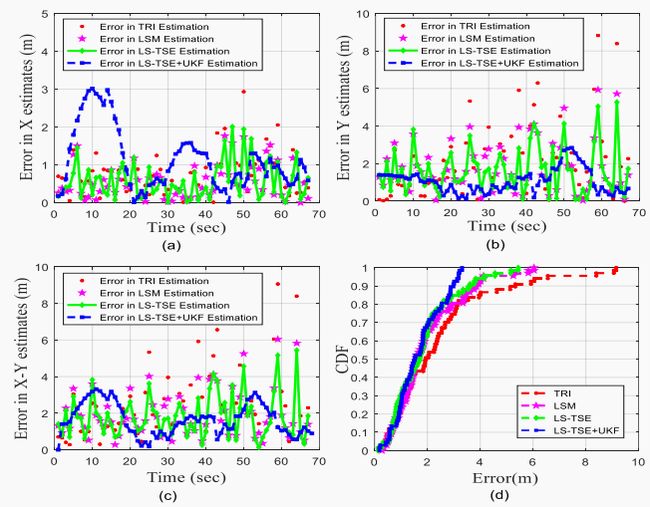
在行人定位技术方面,文章[12]提出LS-TSE+UKF法,该方法基本原理是通过改进原来的三边定位方法,用最小二乘法进行泰勒级数展开,发现其性能优于单独使用三边定位或者最小二乘模型以及LS-TSE方案。
⑶基于路测实时WIFI-蓝牙检测数据的交通出行模型甄别技术
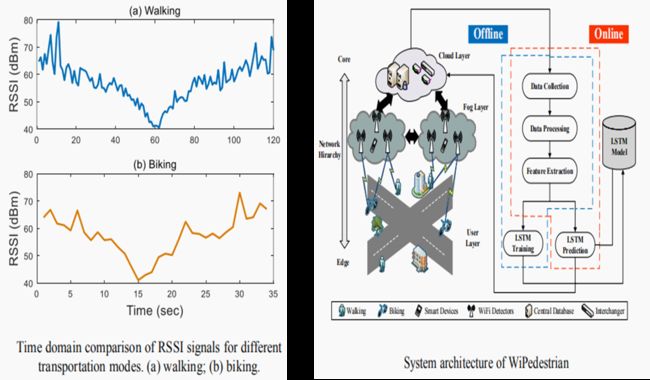
文章根据不同的交通方式产生不同的RSSI信号的原理。考虑到信号的振动可能是由旅行速度、道路和旅行时间引起的。假设当步行者和骑自行车的人移动时,WIFI探测器足够敏感,可以捕捉到这些动态特征以及特征提取和模式分类技术可以将混合非机动车交通网络的MAC地址分为步行和骑自行车两类。基于以上建立了WiPedestrian结构系统。WiPedestrian系统由数据采集、数据处理、特征提取和模式分类四部分组成。数据收集模块捕获覆盖区域内启用WIFI的设备广播的探测请求,并记录诸如MAC地址、RSSI、时间戳等数据包。数据处理模块具有三个关键功能:去除机动车产生的不准确数据,恢复丢包丢失的数据,降低RSSI信号噪声。特征提取模块进一步提取无线传播模型的参数和相关特征,如旅行速度、连接数量和RSSI信号的一阶导数。模式分类模块由LSTM训练和LSTM预测两部分组成。在前一部分中,该模块基于相关特征训练LSTM模型;在第二部分,基于训练好的LSTM模型,将MAC地址分为步行和骑自行车两种不同的非机动车交通模式。
五、下期预告
主题:待定
主讲人:香港理工大学马玮
时间:2020年7月25号晚7点,具体时间请关注公众号后续通知。
