遥感概论笔记
遥感原理笔记
笔记来源 中国大学mooc周纪教授讲授的《遥感原理》
链接:https://www.icourse163.org/learn/UESTC-1205894821?tid=1467129534
文章目录
-
- 遥感原理笔记
- @[toc]
-
- 第二章 电磁波及遥感物理基础
-
- 2.1 电磁辐射度量
- 2.2 黑体辐射三大定律
- 2.3 电磁辐射在大气中的传输
- 2.4 植被反射
-
- 2.4.1基本概念
- 2.4.2植被(绿色)反射波谱曲线
- 2.5 土壤水体反射波谱特性
-
- 2.5.1土壤
- 2.5.2 水体
- 2.5.3 地物光谱野外测量的基本思想
- 第三章 遥感平台
-
- 3.1 遥感平台种类
- 3.2 卫星轨道
- 3.3 陆地卫星
- 3.4 气象卫星和海洋卫星
-
- 3.4.1气象卫星
- 3.4.2 海洋卫星
- 第四章 遥感传感器
-
- 4.1 传感器的组成
- 4.2 摄影成像类传感器(==原理没听太懂==)
- 4.3 扫描成像类传感器
-
- 4.3.1光学/机械扫描成像(光/机)
- 4.3.2推扫式扫描成像(推帚式)
- 4.3.3高光谱成像光谱扫描
- 4.4 ==微波遥感与成像(听不太懂)==
- 第五章 遥感图像的存储于基本处理
-
- 5.1时间、空间、光谱、辐射分辨率
- 5.2遥感图像的数据存储格式
-
- 5.2.1BSQ波段顺序格式
- 5.2.2BIL按行交叉格式
- 5.2.3 BIP 按像元交叉格式
- 第六章 遥感图像的几何处理
-
- 6.1 遥感图像的几何变形
- 6.2 遥感图像的几何校正
-
- 6.2.1几何精校正的过程与方法:
- 6.3 遥感图像的自动配准和镶嵌(==听不太懂==)
- 第七章 遥感图像的辐射处理
-
- 7.1 辐射误差来源
- 7.2 辐射图像校正
-
- 7.2.1 传感器校正
- 7.2.2 大气校正
- 7.2.3 地形和太阳高度角的校正
- 7.3 辐射增强
- 第八章 遥感图像的判读
-
- 8.1遥感图像的目视判读
-
- 8.1.1人工目视解释
- 8.2 遥感图像数据统计特征
-
- 8.2.1遥感图像模式识别的基础知识
- 8.3 遥感图像非监督分类
- 8.4遥感图像监督分类
- 8.5遥感图像分类后评价
- 第九章 遥感应用
文章目录
-
- 遥感原理笔记
- @[toc]
-
- 第二章 电磁波及遥感物理基础
-
- 2.1 电磁辐射度量
- 2.2 黑体辐射三大定律
- 2.3 电磁辐射在大气中的传输
- 2.4 植被反射
-
- 2.4.1基本概念
- 2.4.2植被(绿色)反射波谱曲线
- 2.5 土壤水体反射波谱特性
-
- 2.5.1土壤
- 2.5.2 水体
- 2.5.3 地物光谱野外测量的基本思想
- 第三章 遥感平台
-
- 3.1 遥感平台种类
- 3.2 卫星轨道
- 3.3 陆地卫星
- 3.4 气象卫星和海洋卫星
-
- 3.4.1气象卫星
- 3.4.2 海洋卫星
- 第四章 遥感传感器
-
- 4.1 传感器的组成
- 4.2 摄影成像类传感器(==原理没听太懂==)
- 4.3 扫描成像类传感器
-
- 4.3.1光学/机械扫描成像(光/机)
- 4.3.2推扫式扫描成像(推帚式)
- 4.3.3高光谱成像光谱扫描
- 4.4 ==微波遥感与成像(听不太懂)==
- 第五章 遥感图像的存储于基本处理
-
- 5.1时间、空间、光谱、辐射分辨率
- 5.2遥感图像的数据存储格式
-
- 5.2.1BSQ波段顺序格式
- 5.2.2BIL按行交叉格式
- 5.2.3 BIP 按像元交叉格式
- 第六章 遥感图像的几何处理
-
- 6.1 遥感图像的几何变形
- 6.2 遥感图像的几何校正
-
- 6.2.1几何精校正的过程与方法:
- 6.3 遥感图像的自动配准和镶嵌(==听不太懂==)
- 第七章 遥感图像的辐射处理
-
- 7.1 辐射误差来源
- 7.2 辐射图像校正
-
- 7.2.1 传感器校正
- 7.2.2 大气校正
- 7.2.3 地形和太阳高度角的校正
- 7.3 辐射增强
- 第八章 遥感图像的判读
-
- 8.1遥感图像的目视判读
-
- 8.1.1人工目视解释
- 8.2 遥感图像数据统计特征
-
- 8.2.1遥感图像模式识别的基础知识
- 8.3 遥感图像非监督分类
- 8.4遥感图像监督分类
- 8.5遥感图像分类后评价
- 第九章 遥感应用
第二章 电磁波及遥感物理基础
2.1 电磁辐射度量
辐射能量(W):电磁辐射的能量 J
辐射通量( Φ \Phi Φ):单位时间内由2π空间通过某一面积的辐射能量( ϕ = d W / d T \phi=dW/dT ϕ=dW/dT)
辐射通量密度:单位面积上的辐射通量
辐照度(E):单位面积上被辐射物理所接受的辐射通量(w/ m 2 m^2 m2)
辐射出射度(M):单位面积上辐射源物体辐射出的辐射通量
辐射强度(I):点辐射源在单位立体角、单位时间内,向某一方向辐射出的辐射能量。( I = d Φ / d Ω I=d\Phi/d\Omega I=dΦ/dΩ) 单位:瓦特/球面度(W/Sr)
辐射亮度(L):面辐射源在单位立体角、单位时间内,向某一方向辐射出的辐射能量。( I = d Φ / d Ω I=d\Phi/d\Omega I=dΦ/dΩ) 单位:瓦特/球面度(W/Sr)
2.2 黑体辐射三大定律
普朗克辐射定律:
M λ ( λ , T ) = 2 π h c 2 λ 5 ∗ 1 e h c / λ K T − 1 M_\lambda(\lambda,T)=\frac{2\pi hc^2}{\lambda ^5}*\frac{1}{e^{hc/\lambda KT}-1} Mλ(λ,T)=λ52πhc2∗ehc/λKT−11
斯特潘-波尔兹曼定律:
M = σ T 4 M=\sigma T^4 M=σT4
维恩位移定律:
λ m a x . T = b \lambda_{max} .T=b λmax.T=b
2.3 电磁辐射在大气中的传输
- 对流层:空气作垂直运动形成对流,天气变化明显,航空遥感
- 平流层
- 中间层
- 电离层:陆地卫星分布在改层
- 热层
瑞利散射:引起散射的大气粒子直径远小于入射电磁波波长,前向和后向散射强度相当。

米散射:引起散射的大气粒子直径和入射电磁波波长相当,前向大于后向
**非选择性散射:**远大于波长,散射各向同性,与入射波长无关(云层呈现白色的原因)

大气窗口:电磁波通过大气时,衰减较小,而透过率较高的电磁波段,称为大气窗口。
遥感可用的大气窗口:
2.4 植被反射
2.4.1基本概念
地物反射:界面光滑镜面反射,界面粗糙发生漫反射。漫反射面称为朗伯面
反射系数(反射率):反射辐射/入射辐射*100
%
同一地物对不同波长的电磁波有选择性的反射,即地物对电磁波的反射能力(反射系数)随入射波长变化。
**光谱反射率:**地物对应与某个波长电磁波的反射率。
反射波谱:地物反射系数谁入射波长的变化规律。
电磁波谱:

热红外:光谱名。红外谱段波长在0.76-1000微米之间,其中0.76-3.0微米为反射红外波段,3-18微米为发射红外波段。中红外 远红外和超远红外是产生热感的原因,所以又称热红外
2.4.2植被(绿色)反射波谱曲线
叶片的反射率

植被在0.4-0.7um部分,吸收率最大(蓝色那块),叶绿素较强吸收:0.45um、0.67um,叶绿素组织强反射0.74~1.3um,水的主要吸收1.45,1.92,2.7um
将反射率这条曲线单独提出来

叶绿素吸收较多的是蓝光和红光,分别对应可见光区域的两个波谷。
1.可见波段叶绿素吸收的原因:叶绿素喜欢蓝光,波长段,能量大,吸收能量后,叶绿素分子发生能级跃迁到第二单线态,因为不稳定,会释放热量跳到第一单线态,再跳到基态(中间释放的能量就用来进行光合作用或产生荧光),而波长较长的红光能够让叶绿素分子刚好跃迁到第一单线态,再释放能量回到基态,所以可见光波段叶绿素会吸收红光和蓝光,反射率曲线产生波谷。
2.近红外波段反射率增大的原因如下图所示

植被在近红外波段时,叶片多层的结构导致近红外反射增加,透过上一层的辐射会被下一层反射
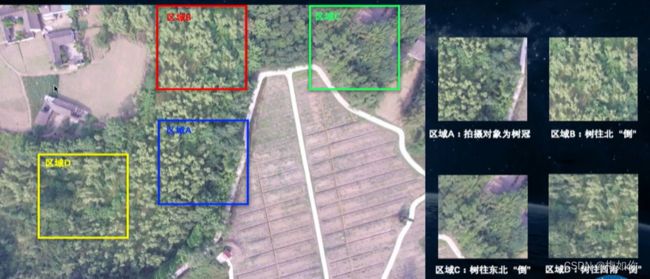
树冠的反射率
树冠有很多叶片聚集在一起,除了叶片本身反射率的影响,还有冠层的几何结构影响。比如植被冠层中叶片的多少(叶面积指数:一平方米的上方如果所有的叶子面积之和为5平方米,那么叶面积指数就是5)

在可见光波段叶面积指数对反射率没有明显变化,而在近红外波段,反射率不会无限增加,一般叶面积指数达到8及以上,反射率就很难增加了。当叶片垂直分布,光从上到下传输时透过率大,而水平分布时,光容易被阻挡。
归一化差值植被指数NDVI
NDVI=(NIR-R)/(NIR+R),监测植被生长状态、植被覆盖度和消除部分辐射误差。
健康的绿色植物在NIR近红外波段和R红光波段的反射差异很大,绿色植物对红光强吸收,所以当R很小,即NDVI的值越大时,植被长势越好
NDVI几何意义:以近红外波段为纵轴,红光波段为横轴,NDVI代表斜率。
2.5 土壤水体反射波谱特性
2.5.1土壤
土壤含水量越高,反射率越低。

有机质含量越高(越肥沃),土壤颜色越深,反射率越低
土壤粒度越大,反射率越低(会形成阴影啦)
2.5.2 水体
在0.6微米以前水体的反射率很低,超过0.7微米后反射率上升,当然也会受到海藻、浮游生物的影响,叶绿素含量增加,水体的反射率发生变化。
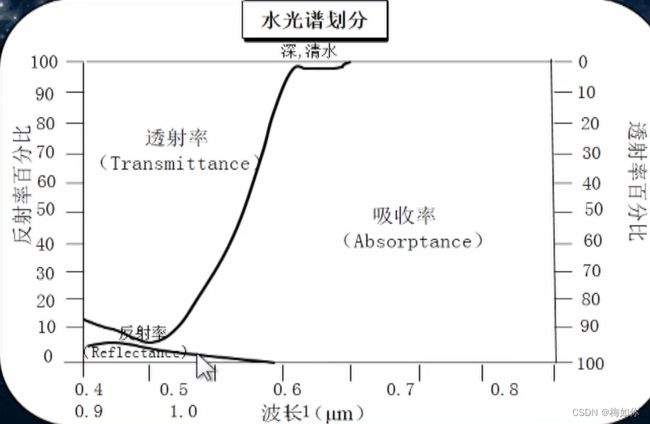
纯色水体反射主要在蓝绿光波段,其他波段吸收率很强,特别是在近红外、中红外波段有很强的吸收带
2.5.3 地物光谱野外测量的基本思想

反射率=反射辐射/入射辐射
可以利用一块(已知反射率的近似漫反射板)的白板或者黑板
白板在可见光-近红外的反射率接近100%,并且反射各向同性。通过测量白板或灰板对太阳辐射的反射,我们可以间接的对太阳入射辐射进行测定
第三章 遥感平台
3.1 遥感平台种类
遥感平台分类:
-
地面:0~100m范围内
-
航空:百米-十多公里
-
航天:240km以上,传感器搭载在环地球的航天器上。
卫星平台包括:陆地、气象、海洋卫星系列
3.2 卫星轨道
卫星轨道特点:
-
遵循开普勒三大定律
开一:卫星轨道是椭圆,其中一个焦点是地球。
开二:在离地近的地方运行快,离地远的地方速度要慢一些。
开三:轨道长半轴的立方与周期平方之比是常数
卫星轨道参数:

轨道倾角接近90度,有利于卫星对全球范围成像,远离90°会很难观测到极地地区。
-
卫星轨道长半轴a:椭圆轨道的长半轴
-
轨道的偏心率e:焦距/长半轴
偏心率越小轨道越接近圆形(有利于卫星成像),偏心率越大,轨道越扁平
-
升轨:卫星由南向北运行。
-
降轨:卫星由北向南运行。
-
星下点:卫星在地球表面的投影。
卫星轨道类型:
- 地球同步轨道(24小时轨道)
- 地球静止轨道(倾角为0)
- 太阳同步轨道:太阳同步轨道
3.3 陆地卫星
主要面向地球资源和环境探测。
特点:
- 主要为近极地太阳同步轨道
- 传感器多样:多光谱、高光谱、热红外、雷达
- 分辨率从亚米级到公里级
中分辨率陆地卫星:
-
美国Landsat卫星系列(太阳同步轨道)
1972年美国发射Landsat-1,迄今发射了8颗Landsat卫星。Landsat-5在轨时间最长(29年)。
-
法国SPOT卫星系列
-
欧洲Sentinel卫星系列
-
中国资源卫星
-
中国环境减灾卫星系列
-
印度IRS卫星系列
-
……
高分辨率陆地卫星:
欧美商业卫星
- IKONOS(首颗分辨率优于1m)
- QuickBird
- GeoEye-1
- Worldview-1、2、3、4
- Pleiades-1、2
- ……
我国高分卫星系列
GF-1卫星于2013发射
3.4 气象卫星和海洋卫星
3.4.1气象卫星
美国的气象卫星:
-
地球静止轨道卫星GOES系列
- 始于1975
- 目前在轨运行的有GOES-14、15、16、17
- 先进基线成像仪ABI等
-
太阳同步轨道卫星NOAA系列
-
始于1970
-
连续发射了20颗,最新为NOAA-20
-
从NOAA-6开始,搭载AVHRR传感器
-
欧洲的气象卫星:
地球静止轨道卫星Meteosat系列
- 始于1977,最新为第二代的Metosat-11。搭载有旋转增强型可见光及红外线成像辐射计SEVIRI(12个波段)
中国的气象卫星:
太阳同步轨道系列:第一代风云1号系列,FY-1A, FY-1B, FY-1C,FY-1D
地球静止轨道系列:
- 第一代:风云2号 FY-2A…
- 第二代:风云4号FY-4A(2016年)
3.4.2 海洋卫星
1978年美国发射了第一颗海洋微信Seasat
美国的海洋卫星:
由国家海洋与大气管理局和宇航局运营
- 海洋水色卫星:SeaStar、Terra/Aqua等
- 海洋动力环境卫星:Seasat、Geosat、Jason等
欧洲的海洋卫星:
由欧洲空间局运营,主要有:Metop、SMOS、CryoSat系列
中国的海洋卫星:
国家海洋局运营,包括海洋水色卫星HY-1系列和海洋动力环境卫星HY-2系列
第四章 遥感传感器
4.1 传感器的组成
遥感传感器一般由采集器、探测器、处理器和输出器4个部分组成
-
采集器(收集器)
采集地物辐射来的能量(碳化硅制成,减少畸变)
-
探测器:将采集的辐射能转化为化学能或电能(光敏探测远见、热敏探测)
-
处理器:对采集的信号进行处理
-
输出器:输出获取的图像、数据
遥感传感器分类:
按电磁波来源分:
- 主动传感器(雷达):它自己发射自己收回结果
- 被动传感:不用自己发射电磁波,只需要记录反射回来的电磁波
按照结构原理分:
- 非图像类型的传感器:面向大气探测。eg:AIRS传感器
- 摄影成像类传感器
- 扫描成像类传感器
- 微波遥感传感器(包括主动和被动)
按照工作波段分:
-
可见光、近红外传感器
-
多光谱传感器
在可见光、近红外波段范围内设置有多个波段的传感器)eg:Landsat-8上的OLI传感器
-
高光谱传感器
波段特别多,数十个或者数百个,波段之间的间隔很小,例如EO-1卫星上的Hyperion创干起3
-
热红外传感器
10.6-12.5um设置了2个波段的eg:Landsat-8上的TIRS传感器
-
微波遥感
4.2 摄影成像类传感器(原理没听太懂)
主要以航空遥感为主
-
分幅式摄影机
一次曝光得到一幅图像,为中心投影
-
全景摄影机
(缝隙式)遥感平台的向前运动,从而实现扫描成像
(镜头转动式)通过物镜筒转动或棱镜镜头转动成像
-
多光谱摄影机
可同时获取可见光和近红外范围内若干个波段的图像。
多相机组合、多镜头组合、光束分离
-
数码摄影机(现代)
与传统摄影机相同、结构类似,记录介质是1光敏电子器件
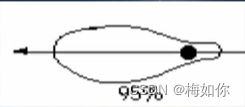
摄影像片的几何特征:
摄影方式:垂直摄影和倾斜摄影
-
垂直摄影:
像片的比例尺(1/m=ab/AB=f/H,焦距比上航高)、
投影(正射投影(光线平行)、中心投影:光线交于一点)
像点位移(如下图)

高点(低点)在图像上的像点相对于平面点向远离(靠近)图像中心的方向移动
4.3 扫描成像类传感器
依靠探测元件和扫描镜,对目标地物以瞬时视场为单位,进行逐点取样,以得到目标地物电磁辐射特性信息,形成一定波段的遥感图像。
主要有:
4.3.1光学/机械扫描成像(光/机)
镜头摆动、逐点扫描–>逐行扫描

取决于IFOV瞬时视场角,总视场角FOV
航高越高,遥感图像的空间分辨率越低,总视场角越大
投影方式为多中心投影

4.3.2推扫式扫描成像(推帚式)

就像扫地一样,扫把向前移动
核心是探测器电荷耦合器件CCD
1列光敏元就对应总视场角

4.3.3高光谱成像光谱扫描
既能成像又能获取目标地物连续的光谱曲线。图谱合一:成像光谱仪
把上面两类型结合起来

Modis传感器
4.4 微波遥感与成像(听不太懂)
微波:波长为 1mm~1m(频率:300MHz-300GHz)的电磁波
微波给了人们不同于光和热的视角去观察地物
光学遥感采用光学技术,通过摄影或者扫描获取信息,而微波遥感采用无线电技术
光学遥感人们采用微米表示波长,对于微波遥感人们采用频率表示。波段用字母表示如下表

微波遥感特点:
- 全天候工作
- 对地物具有一定穿透能力
- 可提供与光学遥感不同的某些信息
- 主动微波遥感可记录电磁波幅度、极化、相位信息(不太懂)
- 对某些目标的鉴别能力更强
雷达:最典型的微波遥感
- 真实孔径雷达(没懂)



- 合成孔径雷达(没懂)
第五章 遥感图像的存储于基本处理
5.1时间、空间、光谱、辐射分辨率
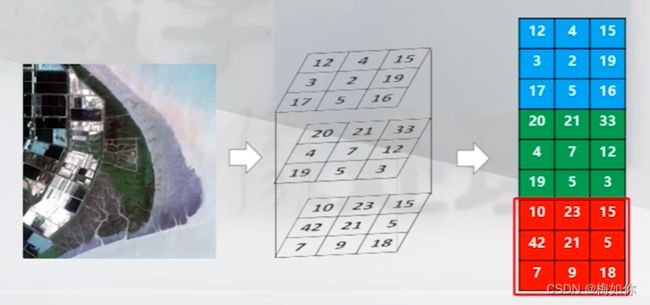
标准假彩色合成(主要突出绿色植被的信息):
植被在近红外波段是高反射,所以将红色赋予近红外波段,植被呈现红色
空间分辨率的意义:如果图像空间分辨率是20m,那么每个像元对应的地面尺寸就为20m
像元信息与空间分辨率的关系:
- 混合像元:地物尺寸小于像元空间分辨率,一个像元里面有多个物体
- 纯像元:只有一个物体的一部分
光谱分辨率:若传感器所探测的波段数越多,每个波段的波长范围越小,波段间的间隔越小,则光谱分辨率越高。
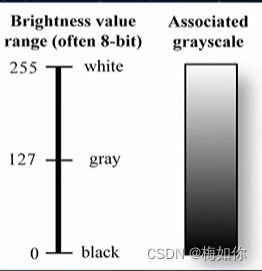
辐射分辨率:表示探测器的灵敏度,反应传感器对不同辐射量差异的分辨能力,以分级数来表示,如下图
7bit 像素值分布在0-127
8bit像素值分布在0-255
比特数越大,则影像辐射分辨能力越强(灰度值等级大)
辐射分辨率与空间分辨率的关系:

**时间分辨率:**对同一成像地区进行重复观测的时间间隔
5.2遥感图像的数据存储格式
5.2.1BSQ波段顺序格式
5.2.2BIL按行交叉格式

5.2.3 BIP 按像元交叉格式

BSQ同一波段的数据都存储在一块,很快就能读取,整幅图像一下子就显示出来了,有利于图像空间分布信息的显示与处理
BIP 读取第一行数据就是一个像元的3(n)个光谱信息有利于图像像元光谱信息的显示与处理
BIL是介于BSQ和BIP之间,兼顾了图像空间分布信息与像元光谱信息的显示与处理。
第六章 遥感图像的几何处理
6.1 遥感图像的几何变形
遥感图像上各种地物的位置、形态、尺寸、方位等特征与其在某个图像投影的参照系统中表达要求不一致。
静态误差:传感器相对地面静止
动态误差:地球旋转
内部误差:传感器自身原因
外部误差:传感器正常,由其他各种因素造成的误差
几何变形的影响因素:
-
遥感平台位置和运动状态变化
-
地形起伏(像点位移)见4.2节
- 高(低)点在图像上的像点相对于平面点向远离(靠近)图像中心方向移动
-
地球表面曲率
地球表面是弧形的,不是直的,向图像中心移动
-
大气折射
-
地球自转
对于扫描类的传感器,地球自转会让影像偏离(错位)
6.2 遥感图像的几何校正
将多种因素引起的变形纠正过来
几何粗纠正(一般下载下来的图像都已经系统误差校正过)
几何精校正:利用GCP地面控制点进行
6.2.1几何精校正的过程与方法:
-
地面控制点选取
尽量选择图像上有明显、清晰的定位识别标志,如道路交叉点。
-
多项式校正模型
待校正的图像上的图像坐标(x,y)与真实地理坐标(X,Y)之间的函数映射关系

x是错误点横坐标,它与正确点(X,Y)存在一种函数关系(也就是通过已知的x,y,可以求出未知的X,Y)如果偏的比较明显,那么这个多项式函数相对就复杂些,即需要求出更多的参数$a_{ij}$,$b_{ij}$使其满足这个方程。
当N=2时,M最少控制点数为6, M = ( N + 1 ) ∗ ( N + 2 ) 2 M=\frac{(N+1)*(N+2)}{2} M=2(N+1)∗(N+2)也就是最少需要在待校正的图像上找6个点,当然找的越多校正效果越好
-
坐标变换
直接校正法(从待校正图像出发)
利用步骤2求得的方程,可以根据(x,y)求出(X,Y),可以重新定位,然后把对应的像元值也赋予过来。但是原始图像存在几何变形,所以有些可能重复,难得到均匀排列的像元值。
间接校正法
从空白的校正后的图像出发,将(X,Y)定位,然后赋予对应像元值。
-
灰度重采样
运用步骤2函数后算出的(X,Y)坐标有些会出现小数点,这时候就得让它重新赋值。方法如下:
-
第一种:最近邻法(离哪个点近值就赋给哪个点)—简单但会造成像元值不连续
-
第二种:双线性内插法

根据距离赋予权重,加权求和。最常用,解决不连续,但计算增加 -
第三种:三次卷积内插法

。虽然边缘有所增强,但计算量太大
-
-
校正精度评价
6.3 遥感图像的自动配准和镶嵌(听不太懂)
配准:有很多张图像时,再一张一张的去校正就很慢,我们可以采用自动配准
镶嵌:研究区超过了一张图像,需要将两张或多张图像拼接起来。
镶嵌前提:
- 图像有较高的配准精度
- 图像之间波段数目相同
- 相邻图像之间有一定的重叠
- 需要有基准
图像匹配方法:
- 直方图匹配
- 彩色亮度匹配
重叠区域像元值确定:
- 平均值法
- 最小值法
- 最大值法
- 指定切割线(指定为挨着线的值)
- 线性插值(赋予权重)
第七章 遥感图像的辐射处理
7.1 辐射误差来源
遥感成像过程涵盖了太阳-大气-地表-大气-传感器多个环节。遥感图像辐射误差来源:
-
传感器造成
由光学系统或者光电变化系统特征
-
大气造成
大气效应会降低图像的对比度
-
地形与光照
凸起的地形会遮挡阳光,造成阴影
不同季节阳光照射角度不同
7.2 辐射图像校正
辐射校正包括:传感器校正、大气校正、地形和太阳高度角校正
校正流程:

7.2.1 传感器校正
主要通过传感器辐射定标(建立输出灰度值与实际地物辐射亮度的定量关系)来实现。
-
相对辐射定标
探测元件归一化,降低或消除条带的影响
-
绝对辐射定标
通过标准辐射源,在不同波段建立输入值与输出值之间的线性关系(得到这个函数,就可以纠正输出数据)
绝对辐射定标包括:(不懂原理)
- 实验室定标
- 星上定标
- 场地定标
基于绝对辐射定标获得的定标系数,就可以将灰度值准确的转化为光谱辐亮度这样就完成了传感器校正
7.2.2 大气校正
对于反射波段的遥感图像:消除大气散射、吸收等引起的误差,将星上光谱辐亮度转换为地表光谱辐亮度乃至地表真实反射率。
对于发射波段的遥感图像(热红外波段的遥感图像):消除大气散射、发射等引起的误差,将光谱辐亮度或星上亮温转换为地表亮温乃至地表温度。
大气校正方法:
-
基于辐射传输方程的大气校正方法
通过方程中大气参数求解地表反射率/温度等参数
辐射传输模型不懂,6S、MODRRAN模型
-
基于地面实测数据或辅助数据的大气校正方法
弄一个函数方程,真实的和错误的分别当横纵轴。简单,但需要很多真实数据,且推广到其他区域不确定性很大。
-
基于特殊波段的大气校正方法
散射主要发生在较短的波段,对近红外波段几乎没有影响,可以把近红外波段的图像作为无散射影响的标准波段,与带校正波段的图像进行线性回归建立方程,截距即是大气辐射带来的误差。

7.2.3 地形和太阳高度角的校正
地形考虑坡度
太阳:

7.3 辐射增强
增强感兴趣目标和背景之间的反差
图像灰度直方图:
线性/非线性变化
改变灰度值的范围,使得遥感图像色调多一些,方便观察(通过一些函数变化:指数、对数、一次函数)
- 直方图均衡化:
使得一定范围内的像元数量大致相等,图像看起来更清晰

-
直方图匹配:
通过变换使得一个图像的直方图和另一个图像的直方图类似,(这样就便于图像镶嵌,变化检测)
第八章 遥感图像的判读
8.1遥感图像的目视判读
为什么要对遥感影像解译?
- 可以识别出飞机类型,对地震等灾害进行预测和评估,可以看植被的长势,灾后的重建评估,和以前的影像对比看看有没有变化。
遥感图像解释包括人工目视解释和计算机自动分类。
8.1.1人工目视解释
专业知识,肉眼识别。
直接解译标志(看颜色、布局等本身特点)、间接解译标志(看关系)
同物异谱、同谱异物
建立解译标志(注意同物异谱):

需要专家,比较麻烦,通常作为计算机自动分类的结果验证。
计算机自动分类:比如非监督、监督分类
8.2 遥感图像数据统计特征
图像分类:将图像中每个像元点都给它分类,每个类别给以不同的颜色。(像素级标签)
8.2.1遥感图像模式识别的基础知识
-
光谱特征向量
地物点在不同波段图像中亮度的观测量构成一个多维的向量V。(eg:橙色C=(225,154,0)三个颜色的亮度值叠加起来,那么[255,154,0]构成光谱特征向量)

-
光谱特征空间
所有波段的亮度构成的直角坐标系,同类地物具有聚类效应。
如果将光谱特征向量表示在光谱特征空间中,那么它是一个点

-
谱距离
像素点与该地物类别中心的距离(用欧式距离计算)
-
遥感图像统计特征
均值、方差、标准差
分析灰度直方图分布,可以看出地物有没有可分性,一般来讲,同一地物在同一波段下的灰度值同城呈正态分布
协方差:



由于遥感影像具有多个波段,各个波段并不独立,有时候不好区分地物,协方差用来区分两个波段的相关性,去除冗余信息.
协方差矩阵对角线的元素是波段i与波段i的协方差,即方差
右图可以看出波段1和2的协方差比较大,说明两者相关性大,而波段3协方差则比较小,所以,利用波段3来区分两种地物会更加容易。
-
特征变换
将不同波段对应的像元值做一下变换,使得不同波段的区分度高一点
主成分变换、缨帽变换、哈达玛变换(这些变换还没学呢)
8.3 遥感图像非监督分类
K-means法
ISODATA法
算法是在k-Means算法的基础上,增加对聚类结果的“合并”和“分裂”两个操作,即当两个聚簇中心的值小于某个阈值时,将两个聚类中心合并成一个,当某个聚簇的标准差小于一定的阈值时或聚簇内样本数量超过一定阈值时,将该聚簇分列为2个聚簇,甚至当某个聚簇中的样本量小于一定阈值时,则取消该聚簇。
8.4遥感图像监督分类
最小距离法、最大似然法、支持向量机(SVM
监督分类的主要步骤:
- 确定类别数(水体、建筑物、道路、树木)
- 对每一种地物类别选择训练样本
- 特征变换和特征选取
- 选择分类器
- 训练参数
- 分类
-
最小距离法
类别中心由训练样本计算得到
离哪个类别中心近,就归到哪个类别。

它离u2比较近,所以按照最小距离分类法,归到u2。
虽然简单,但是没考虑样本分布,u3这类别分布比较广,圈比较大,所以很有可能是属于u3这个类别的。
-
最大似然法
假定了每个类别的分布函数为正态分布,那么它符合正态分布规律。通过贝叶斯判别准则,计算待分类的像元到各个类别的归属概率。哪个概率大舅归属到哪类。
分类原理:
设有s个类别,用 w 1 、 w 2 、 . . . 、 w s w_1、w_2、...、w_s w1、w2、...、ws来表示。根据贝叶斯定理可以得到样本X属于类别i( w i w_i wi)的概率为:
P ( w i ∣ X ) = p ( X ∣ w i ) p ( w i ) ∑ i = 1 s P ( X ∣ w i ) p ( w i ) P(w_i|X)=\frac{p(X|w_i)p(w_i)}{\sum_{i=1}^{s}{P(X|w_i)p(w_i)}} P(wi∣X)=∑i=1sP(X∣wi)p(wi)p(X∣wi)p(wi)
X属于 w i w_i wi类别的概率=在 w i w_i wi类别当中出现X的概率 x w i w_i wi出现的概率,除以X出现的概率。w i w_i wi出现的概率是已知的,现在只需要求 p ( X ∣ w i ) p(X|w_i) p(X∣wi)
那就算出 w i w_i wi的概率密度函数(如下图),由光谱特征向量求出均值和方差,求出概率密度函数,再把X带入函数,就可以知道了X属于每个类别的概率大小 p ( X ∣ w i ) p(X|w_i) p(X∣wi)。

f ( x ) = 1 δ 2 π e − ( x − u ) 2 2 δ 2 f(x)=\frac{1}{\delta \sqrt{2\pi}}e^{-\frac{(x-u)^2}{2\delta^2}} f(x)=δ2π1e−2δ2(x−u)2
-
支持向量机(SVM)
关注边界样本,找到一个超平面把样本分开
分界面的确定就是需要用到支持向量,下图点到那条线的距离(那条虚线)

8.5遥感图像分类后评价
分类后处理(消除孤立像元):
众数分析,少数分析,类聚块、类过滤
定量评价(主要看标黄那个):
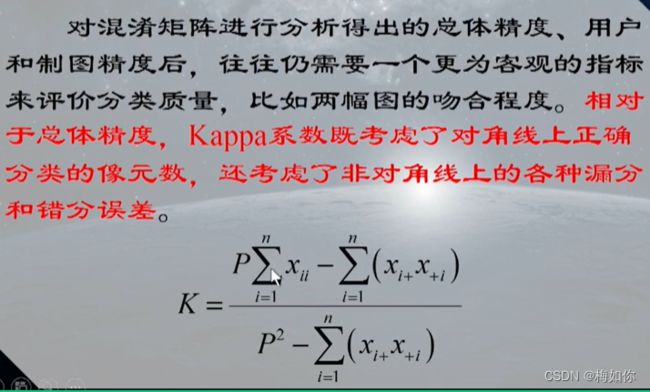
总体分类精度、用户精度、错分误差、制图精度、漏分误差、Kappa系数

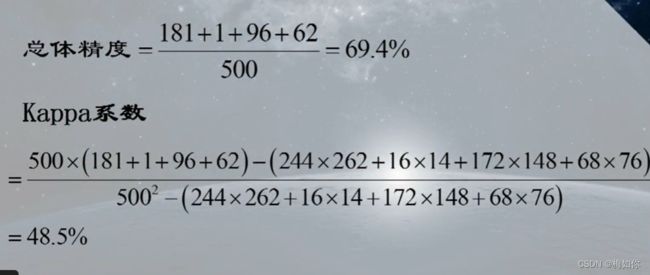
kappa系数:
第九章 遥感应用
应用
土地覆被变化、气候变化、自然灾害监测
我国的GlobeLand30产品是为全球空间分辨率最高之一