pytorch
https://pytorch-cn.readthedocs.io/zh/latest/
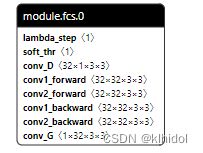
根据model计算参数数量
自己算:单层乘法,层间加法,一个卷积核就算一层,这样是8层
def count_param(model):
param_count = 0
layer = 0
for param in model.parameters():
layer += 1
param_layer = param.view(-1).size()[0]
param_count += param_layer
print(f'layer - {layer} shape:{param.size()} layer amount : {param_layer} sum : {param_count}')
print(f'The amount of parameters is {param_count} ')
输出相关
进度条tqdm
直接套在range外面就行
for epoch in tqdm(range(1,self.num_epochs+1-self.last_epoch))
日志输出
def setlogger(path):
logger = logging.getLogger()
logger.setLevel(logging.INFO)
logFormatter = logging.Formatter("%(asctime)s %(message)s", "%m-%d %H:%M:%S")
fileHandler = logging.FileHandler(path)
fileHandler.setFormatter(logFormatter)
logger.addHandler(fileHandler)
consoleHandler = logging.StreamHandler()
consoleHandler.setFormatter(logFormatter)
logger.addHandler(consoleHandler)
参数微调
with torch.no_grad():
所有计算得出的tensor的requires_grad都自动设置为False。
就是在计算时不会更新,相当于冻结
音频输入输出:
https://librosa.org/doc/latest/ioformats.html?highlight=output
keras文档
模型保存和测试
保存
运行
测试
model.save("./model.h5")
new_model = load_model('./model.h5')
y = new_model.predict(feature)
y输出结构看fit时结构,和pytorch的区别是没有forword。
model.fit(feature, label, batch_size=128, epochs=200, validation_split=0.1)
gpu
gpu相关设置
gpu安装
dataloader
0.dataloader的迭代次数
for i, data in enumerate(self.dataloader['train_loader']):
迭代次数和就是数据集数据量/batchsize取整
epoch 与 batch 关系
一个epoch完整过一次数据集
batch:一次forward,backward用多少数据
iteration :一次传播
iteration和batch是对应的
for epoch_i in range(start_epoch+1, end_epoch+1):
for i,data in enumerate(rand_loader):
1.dataloader的基础使用
必要
test_data = torchvision.datasets.CIFAR10("./CIFAR10", train=False, transform=torchvision.transforms.ToTensor())
test_loader = DataLoader(dataset=test_data, batch_size=4, shuffle=True, num_workers=0, drop_last=False)
Training_data_Name = 'Training_Data.mat'
Training_data = sio.loadmat('./%s/%s' % (args.data_dir, Training_data_Name))
Training_labels = Training_data['labels']
rand_loader = DataLoader(dataset=RandomDataset(Training_labels, nrtrain), batch_size=batch_size, num_workers=0, shuffle=True)
2.dataloader中的data
继承dataset类
实现三个方法,或者迭代器方法
以下如何实现的,迭代中的data就是咋样的
def __getitem__(self, index):
return torch.Tensor(self.data[index, :]).float()
def __iter__(self):
return self.generator
item和iter中返回的是单个数据
但是迭代中data返回batch*单个,这一处理由dataloader实现
1.简单实现三个函数
init的参数可操作
其他两个是固定的不能变
getitem:接收一个索引, 返回一个样本
for i,data in enumerate(rand_loader):
batch_x = data
class RandomDataset(Dataset):
def __init__(self, data, length):
self.data = data
self.len = length
def __getitem__(self, index):
return torch.Tensor(self.data[index, :]).float()
def __len__(self):
return self.len
2.用生成器自定义迭代方法
def get_random_batch_generator(self, Set):#'train'
#其他处理过程
batch = {'data_input': batch_inputs, 'condition_input': condition_inputs}, {
'data_output_1': batch_outputs_1, 'data_output_2': batch_outputs_2}
yield batch
class denoising_dataset(torch.utils.data.IterableDataset):
def __init__(self, generator):
self.generator = generator
def __iter__(self):
return self.generator
train_set_generator = dataset.get_random_batch_generator('train')
train_set_iterator = datasets.denoising_dataset(train_set_generator)
train_loader = DataLoader(train_set_iterator, batch_size=None)
dataloader = {'train_loader':train_loader, 'valid_loader':valid_loader}
for i, data in enumerate(self.dataloader['train_loader']):
x, y = data
yield用法
- yield就是 return 返回一个值,并且记住这个返回的位置,下次迭代就从这个位置后开始
- 如果用getitem和列表,就是加载整个列表,再取值,用生成器函数和yield就是用一个加载一个
- 使用场景:需要逐个去获取容器内的某些数据,容器内的元素数量非常多,或者容器内的元素体积非常大
- 如果一个函数定义中包含 yield 表达式,那么该函数是一个生成器函数
- 底层实现和next函数有关
data = next(self.dataset_iter)
使用yield相当于返回了一个可供迭代的列表
在函数开始处,加入 result = list();
将每个 yield 表达式 yield expr 替换为 result.append(expr);
在函数末尾处,加入 return result。
def get_random_batch_generator(self, Set):#'train'
if Set not in ['train', 'test']:
raise ValueError("Argument SET must be either 'train' or 'test'")
while True:
sample_indices = np.random.randint(0, len(self.sequences[Set]['clean']), self.batch_size) #btach.size:10
condition_inputs = []
batch_inputs = []
batch_outputs_1 = []
batch_outputs_2 = []
for i, sample_i in enumerate(sample_indices):#[ 9941 5657 5610 6613 6152 2843 10611 2560 5729 10366]
while True:
speech = self.retrieve_sequence(Set, 'clean', sample_i) #52480
noisy = self.retrieve_sequence(Set, 'noisy', sample_i) #52480
noise = noisy - speech
if self.extract_voice:
speech = speech[self.voice_indices[Set][sample_i][0]:self.voice_indices[Set][sample_i][1]] #shape:39200
speech_regained = speech * self.regain_factors[Set][sample_i] #39200 20800(5657)
noise_regained = noise * self.regain_factors[Set][sample_i]
if len(speech_regained) < self.model.input_length:
sample_i = np.random.randint(0, len(self.sequences[Set]['clean']))
else:
break
offset = np.squeeze(np.random.randint(0, len(speech_regained) - self.model.input_length, 1)) #29494 7516(5610)
speech_fragment = speech_regained[offset:offset + self.model.input_length] #shape:7739
noise_fragment = noise_regained[offset:offset + self.model.input_length]
Input = noise_fragment + speech_fragment #7739
output_speech = speech_fragment #7739
output_noise = noise_fragment
if self.noise_only_percent > 0:
if np.random.uniform(0, 1) <= self.noise_only_percent:
Input = output_noise #Noise only
output_speech = np.array([0] * self.model.input_length) #Silence
batch_inputs.append(Input) #list
batch_outputs_1.append(output_speech)
batch_outputs_2.append(output_noise)
if np.random.uniform(0, 1) <= 1.0 / self.get_num_condition_classes():
condition_input = 0
else:
condition_input = self.speaker_mapping[self.speakers[Set][sample_i]]
if condition_input > 28: #If speaker is in test set, use wildcard condition class 0
condition_input = 0
condition_inputs.append(condition_input)
batch_inputs = np.array(batch_inputs, dtype='float32')#array
batch_outputs_1 = np.array(batch_outputs_1, dtype='float32')
batch_outputs_2 = np.array(batch_outputs_2, dtype='float32')
batch_outputs_1 = batch_outputs_1[:, self.model.get_padded_target_field_indices()]
batch_outputs_2 = batch_outputs_2[:, self.model.get_padded_target_field_indices()]
condition_inputs = self.condition_encode_function(np.array(condition_inputs, dtype='uint8'), self.model.num_condition_classes)
batch = {'data_input': batch_inputs, 'condition_input': condition_inputs}, {
'data_output_1': batch_outputs_1, 'data_output_2': batch_outputs_2}
yield batch
复数处理
view_as_real
在最后增加一个维度,大小为2
1->1,2
1+2j->[1,2]
取实数部分
x = torch.view_as_real(x)[:,:,:,0].squeeze(-1)
x_input = x.view(-1, 1, 39, 39)
运算,转化为numpy
https://blog.csdn.net/Stephanie2014/article/details/105984274
维度处理
size不变
squeeze()只能去值为1的维度,否则不变
返回张量与输入张量共享内存,所以改变其中一个的内容会改变另一个
a.unsqueeze(x)在x维(从0开始计数,从前往后数)上增加1维
a.unsqueeze(0)
6 ->1,6
a.squeeze(x) 去掉x维,
-x dim为负,则将会被转化dim+input.dim()+1
-1就是size从前往后最后一维
6->6,1
a=squeeze(a)去掉所有值为1的维度
size变化,值复制
repeat
在对应维度上repeat几倍
a.repeat(2,1).size() # 原始值:torch.Size([33, 55])
torch.Size([66, 55])
condition_out = layers.expand_dims(condition_out, -1)#torch.Size([50, 128, 1])
condition_out = condition_out.repeat(1,1,self.input_length)#torch.Size([50, 128, 7739])最后维度每个值重复7739
创建同维度的0矩阵
x=torch.zeros([2,3])
y=torch.zeros(x.shape)
创建指定维度的矩阵
要用列表,不能(2,3)
x=torch.zeros([2,3])
保持数据量不变的情况下变化形状
#xw:torch.Size([128, 1089])
x_input = xw.view(-1, 1, 33, 33) #torch.Size([128, 1, 33, 33])
- 参数中的-1就代表这个位置由其他位置的数字来推断
- 正整数参数就是指定维度
某一维度的长度
x.shape[n]
传播过程
def expand_dims(x, axes):
if axes == 1:
x = x.unsqueeze_(1)
if axes == -1:
x = x.unsqueeze_(-1)
return x
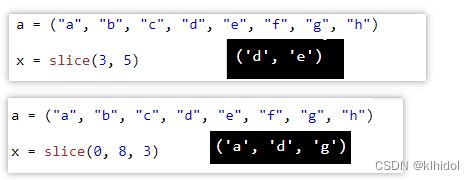
切片
slice()
是一个切片对象,作数组的参数,返回的是下标
对多维的单维切片
layers.slicing(data_expanded,n, m+ 1, 1),2)
def slicing(x, slice_idx, axes):
if axes == 1:
return x[:,slice_idx,:]
if axes == 2:
return x[:,:,slice_idx]
data_out_2 = layers.slicing(data_out, slice(self.config['model']['filters']['depths']['res'],
2*self.config['model']['filters']['depths']['res'],1), 1)
拼接与求和?
data_out = torch.stack( skip_connections, dim = 0).sum(dim = 0)
stack:https://cxymm.net/article/m0_61899108/122666906
detach()?
model 323
batch_metric.append(self.metric_fn(y['data_output_1'].detach(), y_hat[0].detach()))
批量数据处理
items() 返回字典所有键值对
变量:操作,实际值
map(lambda x: x ** 2, [1, 2, 3, 4, 5]) # 使用 lambda 匿名函数
[1, 4, 9, 16, 25]
x = dict(map(lambda i: (i[0], i[1].to(self.device, dtype=torch.float32)), x.items()))
卷积层定义
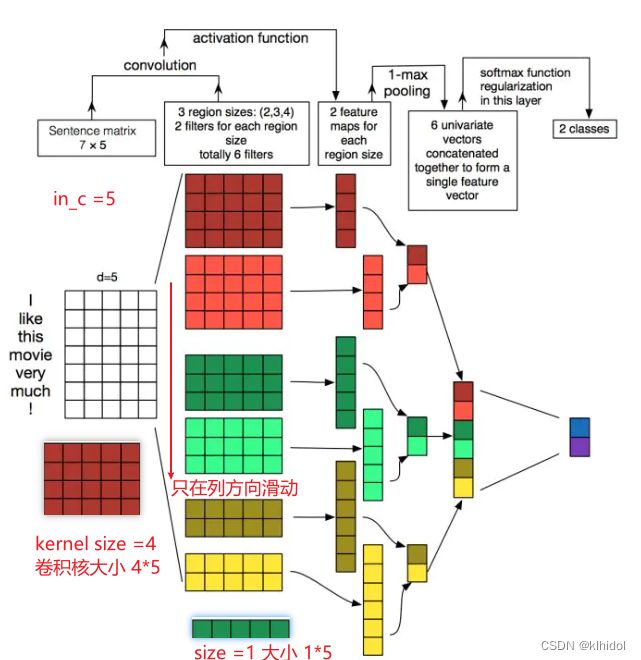
nn.conv1d
对于输入的要求[batch_size,输入通道数,信号大小]
nn.Conv1d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
通道可以用RGB帮助理解,就是某个特定方面的信息
- inchannel:输入信号的维度,不包括batchsize
输入通道数的物理含义 对图片取决于图片类型,RGB为3,对声音就是1,对文本自定义
- out_channels:输出通道数,会影响通过该层后的输出
物理含义是过滤器(卷积核)数量(深度)
- kernel_size(int or tuple) - 卷积核的尺寸,卷积核的大小为(in_channels,size),
横向维度是由in_channels来决定的,所以实际上卷积大小为kernel_size*in_channels
会对output产生影响的只有out_channels
- stride: 卷积步长
- bias: 如果bias=True,添加偏置
nn.conv1d只在列方向滑动,所以卷积核大小中的高维必然与inchannel保持一致
通过之后的效果
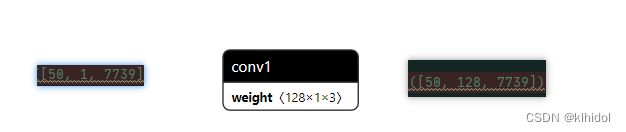
n.Conv1d(1, 128, 3,stride=1, bias = False, padding=1)
Conv1d顺序不同于参数结构顺序
in要对应输入
Conv1d :in out kernel
卷积核:out in kernel
- input 结构
batch_size*input_channel*信号size - 该层参数结构:
output_channel * (input_channel*kernel_size) - 输出结构:
batch_size*output_channel*信号size处理后 - 在stride和pad都为1的情况下,只有output_channel会变化
nn.conv2d
在横向和竖向都移动卷积核
对输入维度的改变与conv1d没有区别
主要是 in - out
如果有pad 和 stride 则后两维也会改变
![]()
layer = nn.Conv2d(1, 3, kernel_size=3, stride=1, padding=0)
- in
- out
- kernel_size:
- 一个数 则大小为n*n
- 一个元组(m*n)
主体训练结构
for epoch_i in range(start_epoch+1, end_epoch+1):
for i,data in enumerate(rand_loader):
batch_x = data
batch_x = batch_x.to(device)
y_hat = self.model(x)
optimizer.zero_grad()
loss_all.backward(retain_graph=True)
optimizer.step()
loss
是一个tensor即可
loss_discrepancy = torch.mean(torch.pow(x_output - batch_x, 2))
loss_constraint = torch.mean(torch.pow(loss_layers_sym[0], 2))
for k in range(layer_num-1):
loss_constraint += torch.mean(torch.pow(loss_layers_sym[k+1], 2))
gamma2 = torch.Tensor([0.01]).to(device)
# loss_all = loss_discrepancy
loss_all = loss_discrepancy + torch.mul(gamma2, loss_constraint)
def get_out_1_loss(self):
if self.config['training']['loss']['out_1']['weight'] == 0:
return lambda y_true, y_pred: y_true * 0
return lambda y_true, y_pred: self.config['training']['loss']['out_1']['weight'] * util.l1_l2_loss(
y_true, y_pred, self.config['training']['loss']['out_1']['l1'],
self.config['training']['loss']['out_1']['l2'])
def get_loss_fn(self, y_hat, y):
target_speech = y['data_output_1']
target_noise = y['data_output_2']
output_speech = y_hat[0]
output_noise = y_hat[1]
loss1 = self.out_1_loss(target_speech, output_speech)
loss2 = self.out_2_loss(target_noise, output_noise)
loss = loss1 + loss2
return loss
optimizer
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
optimizer = optim.Adam(self.model.parameters(), lr=self.config['optimizer']['lr'], weight_decay=self.config['optimizer']['decay'])
retain_graph
retain_graph=True,目的为是为保留该过程中计算的梯度,后续G网络更新时使用
model
model = ISTANet(layer_num)
model = nn.DataParallel(model)
model = model.to(device)
self.device = self.cuda_device()
self.model = model.to(self.device)
model = models.DenoisingWavenet(config)
class DenoisingWavenet(nn.Module):
def __init__(self, config, input_length=None, target_field_length=None):
super().__init__()
def forward(self, x):
卷积操作与卷积层
使用时卷积层只需传入输入
data_out = self.conv1(data_x)
self.conv1 = nn.Conv1d(in, out,kernel_size, stride=1, bias = False, dilation = self.dilation, padding=int(self.dilation))
卷积操作需要传入输入和卷积核
卷积核是 out in size 卷积操作是in out size
torch.nn.functional.conv2d(input, weight, bias=None, stride=1, padding=0, dilation=1, groups=1)
- input
- weight : out in kernel
self.conv1_forward = nn.Parameter(init.xavier_normal_(torch.Tensor(32, 1, 3, 3)))
x = F.conv2d(x_input, self.conv1_forward, padding=1)
数据集划分
https://zhuanlan.zhihu.com/p/385229355
格式转化
torch.tensor(,dtype=)
维度转置
y1 = x.transpose()