《视觉SLAM十四讲》ch7视觉里程计1学习笔记(2)——实践部分对数约束求解相机运动的代码解析
在这篇文章中,记录的是我对《视觉SLAM十四讲》第七讲——视觉里程计1实践部分中,通过2D-2D匹配对估计相机位姿代码的理解以及相关函数的解释。
理论方面的知识可以见我另一篇博客:
《视觉SLAM十四讲》学习笔记——ch7 视觉里程计(1)_sticker_阮的博客-CSDN博客
1 代码解析:
程序的架构如下:
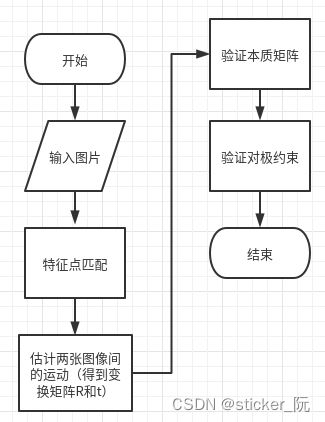
源代码加注解(真的非常详细!!!)
#include
#include
#include
#include
#include
#include
// #include "extra.h" // use this if in OpenCV2
using namespace std;
using namespace cv;
/****************************************************
* 本程序演示了如何使用2D-2D的特征匹配估计相机运动
* **************************************************/
//一些自定义函数的声明
void find_feature_matches(
const Mat &img_1, const Mat &img_2,
std::vector &keypoints_1,
std::vector &keypoints_2,
std::vector &matches);
void pose_estimation_2d2d(
std::vector keypoints_1,
std::vector keypoints_2,
std::vector matches,
Mat &R, Mat &t);
// 像素坐标转相机归一化坐标
Point2d pixel2cam(const Point2d &p, const Mat &K);
int main(int argc, char **argv) {
// if (argc != 3) {
// cout << "usage: pose_estimation_2d2d img1 img2" << endl;
// return 1;
// }
//-- 读取图像
chrono::steady_clock::time_point t1=chrono::steady_clock::now();//计时函数
Mat img_1 = imread("/home/rxz/slambook2/ch7/1.png", CV_LOAD_IMAGE_COLOR); //前面引号里的是图片的位置
Mat img_2 = imread("/home/rxz/slambook2/ch7/2.png", CV_LOAD_IMAGE_COLOR);
assert(img_1.data && img_2.data && "Can not load images!");//assert()为断言函数,条件为假则停止执行
vector keypoints_1, keypoints_2;
vector matches;
find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches);
cout << "一共找到了" << matches.size() << "组匹配点" << endl;
//-- 估计两张图像间运动
Mat R, t;
pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t);
//-- 验证E=t^R*scale
//t_x把t向量写成矩阵形式 反对称矩阵,以下代码是构造一个3*3的矩阵
Mat t_x =
(Mat_(3, 3) << 0, -t.at(2, 0), t.at(1, 0),
t.at(2, 0), 0, -t.at(0, 0),
-t.at(1, 0), t.at(0, 0), 0);
cout << "t^R=" << endl << t_x * R << endl;
//-- 验证对极约束
Mat K = (Mat_(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); //相机内参
for (DMatch m: matches) {
//queryIdx是关键点匹配对在第一幅图像上的的索引,trainIdx是另一副图像上的索引
Point2d pt1 = pixel2cam(keypoints_1[m.queryIdx].pt, K); //将像素坐标转化成归一化坐标
Mat y1 = (Mat_(3, 1) << pt1.x, pt1.y, 1); //将归一化坐标转化成3*1的列向量
Point2d pt2 = pixel2cam(keypoints_2[m.trainIdx].pt, K);
Mat y2 = (Mat_(3, 1) << pt2.x, pt2.y, 1);
Mat d = y2.t() * t_x * R * y1; //y2.t()指的是对y2向量进行转置。验证书P167页,式(7.8)是否为零
cout << "匹配点对的对极几何残差(epipolar constraint) = " << d << endl;
}
chrono::steady_clock::time_point t2=chrono::steady_clock::now();
chrono::durationtime_used=chrono::duration_cast>(t2-t1);
cout<<"程序所用时间:"< &keypoints_1,
std::vector &keypoints_2,
std::vector &matches) {
//-- 初始化
Mat descriptors_1, descriptors_2;
// used in OpenCV3
Ptr detector = ORB::create();
Ptr descriptor = ORB::create();
Ptr matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector match;
//BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 100, max_dist = 0; //初始化最大最小距离
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
// Mat image1;
// drawMatches(img_1,keypoints_1,img_2,keypoints_2,matches,image1);
// imshow("all match",image1);
// waitKey(0);
}
//将像素点坐标转化成归一化坐标
Point2d pixel2cam(const Point2d &p, const Mat &K) {
return Point2d
(
(p.x - K.at(0, 2)) / K.at(0, 0),// x/z=(p.x-cx)/fx
(p.y - K.at(1, 2)) / K.at(1, 1) // y/z=(p.y-cy)/fy
);
}
void pose_estimation_2d2d(std::vector keypoints_1,
std::vector keypoints_2,
std::vector matches,
Mat &R, Mat &t) {
// 相机内参,TUM Freiburg2
Mat K = (Mat_(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
//-- 把匹配点转换为vector的形式
vector points1;
vector points2;
for (int i = 0; i < (int) matches.size(); i++) {
//queryIdx是一组关键点的索引,trainIdx是另一组关键点的索引.
points1.push_back(keypoints_1[matches[i].queryIdx].pt); //把匹配对中属于第一副图像的关键点给points1
points2.push_back(keypoints_2[matches[i].trainIdx].pt); //同上
}
//-- 计算基础矩阵
Mat fundamental_matrix;
fundamental_matrix = findFundamentalMat(points1, points2, CV_FM_8POINT);//CV_FM_8POINT采用八点法,采用8点法求解F = K^(-T) * E * K^(-1)
cout << "fundamental_matrix is " << endl << fundamental_matrix << endl;
//-- 计算本质矩阵
Point2d principal_point(325.1, 249.7); //相机光心, TUM dataset标定值
double focal_length = 521; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point);//E = t(^) * R
cout << "essential_matrix is " << endl << essential_matrix << endl;
//-- 计算单应矩阵
//-- 但是本例中场景不是平面,单应矩阵意义不大
Mat homography_matrix;
homography_matrix = findHomography(points1, points2, RANSAC, 3);
cout << "homography_matrix is " << endl << homography_matrix << endl;
//-- 从本质矩阵中恢复旋转和平移信息.
// 此函数仅在Opencv3中提供
recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point);
cout << "R is " << endl << R << endl;
cout << "t is " << endl << t << endl;
}
2 函数分析:
(1) findFundamentalMat()函数
函数功能:从两个图像中的对应点计算基本矩阵。
函数形式: findFundamentalMat(points1, points2, method, param1, param2, status)
参数详解:
points1 – 包含第一张图像的 N 个点的数组。
points2 – 与 points1 具有相同大小和格式的第二个图像点的数组。
method – 计算基本矩阵的方法。
CV_FM_7POINT for a 7-point algorithm. N = 7
CV_FM_8POINT for an 8-point algorithm. N>=8 (在本代码中计算基础矩阵F采用的就是这个八点法)
CV_FM_RANSAC for the RANSAC algorithm. N>=8 (在代码中计算单应矩阵采用的是RANSAC(随即采样一致性))
CV_FM_LMEDS for the LMedS algorithm. N>=8
param1 – 用于 RANSAC 的参数。 它是从一个点到一条以像素为单位的对极线的最大距离,超过该距离的点被认为是异常值,不用于计算最终的基本矩阵。 它可以设置为 1-3 之类的值,具体取决于点定位的准确性、图像分辨率和图像噪声。
param2 –仅用于 RANSAC 或 LMedS 方法的参数。 它指定了估计矩阵正确的理想置信水平(概率)。
status – 输出包含 N 个元素的数组,其中的每个元素对于异常值都设置为 0,对于其他点设置为 1。 该数组仅在 RANSAC 和 LMedS 方法中计算。 对于其他方法,它设置为全 1。
(2)at函数
K.at(i,j):读取指定矩阵K的第i行,第j列的元素值;
此外,opencv3中图形存储基本为Mat格式,如果我们想获取像素点的灰度值或者RGB值,也可以通过at函数读取,具体形式为:
1.对于单通道图像
image.at
(i,j) 2.对于RGB图像
image.at(i, j)[0] image.at (i, j)[1] image.at (i, j)[2] 注:在图像中i代表列数,j代表行数
(3)Mat_< double > ( 3,3 )
含义:构造一个3*3的矩阵,构造一个显式Mat类
在本代码中如下表示:
Mat t_x =(Mat_
(3, 3) << 0, -t.at
(2, 0), t.at (1, 0), t.at
(2, 0), 0, -t.at (0, 0), -t.at
(1, 0), t.at (0, 0), 0);
如下图所示:

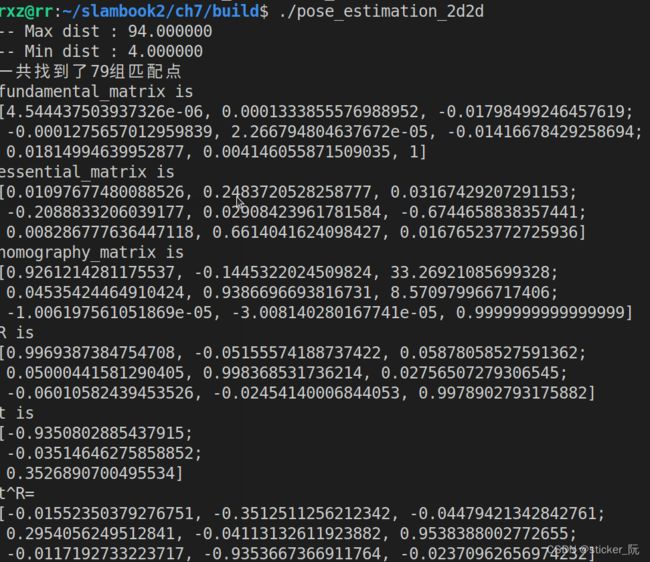
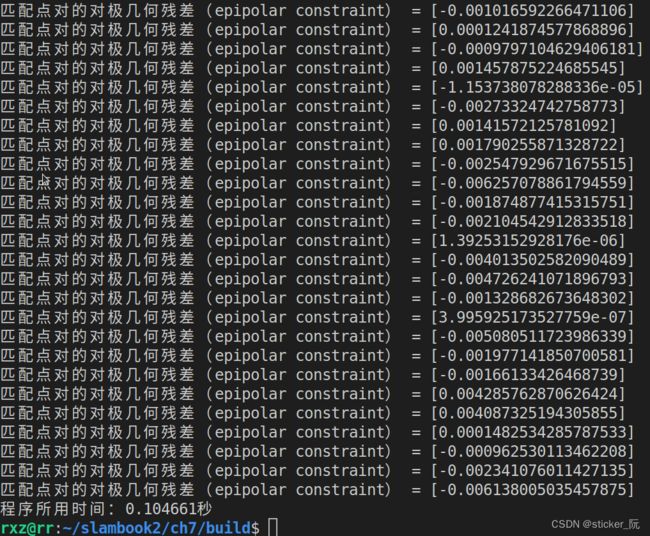
3 效果展示
参考资料