openCV4.0 C++ 快速入门30讲学习笔记(自用 代码+注释)详细版
课程来源:哔哩哔哩
环境:OpenCV4.5.1 + VS2019
目录
002.图像色彩空间转换
003.图像对象的创建与赋值
004.图像像素的读写操作
005.图像像素的算术操作(加减乘除4种不同的API实现
006.滚动条-调整图像亮度
007.滚动条-传递参数
008.键盘响应操作
009.OpenCV自带颜色表操作
010.图像像素的逻辑操作(与,或,非,异或
011.通道合并与分离
012.图像色彩空间转换(提取轮廓然后换绿幕
013.图像像素值统计(min,max,mean均值,standard deviation标准方差
014.图像几何形状绘制(圆,矩形,直线,椭圆
015.随机数与随机颜色
016.多边形填充与绘制
017.鼠标操作与响应(提取选中的ROI区域
018.图像像素类型转换和归一化
019.图像放缩与插值
020.图像翻转
021.图像旋转
022.视频文件摄像头使用
023.视频处理与保存
024.图像直方图
025.二维直方图
026.直方图均衡化
027.图像卷积操作(会变模糊,且卷积核尺寸越大则越模糊
028.高斯模糊
029.高斯双边模糊(可磨皮操作
030.案例:实时人脸检测
代码总结
002.图像色彩空间转换
void colorSpace_Demo(Mat &image);
void QuickDemo::colorSpace_Demo(Mat &image) {
Mat gray, hsv; //定义2个矩阵类型的图像
cvtColor(image, hsv, COLOR_BGR2HSV); //转换成hdv (图像转换函数,第三个参数是转成的类型
cvtColor(image, gray, COLOR_BGR2GRAY); //转成灰度
imshow("HSV", hsv); //显示图片
imshow("灰度", gray); //显示图片
//imwrite("F:\\文件夹\\C++\\OPENCV4入门学习\\图\\hsv.png", hsv); //保存图片 (保存地址,保存图的名称)
//imwrite("F:\\文件夹\\C++\\OPENCV4入门学习\\图\\gray.png", gray); //保存
}003.图像对象的创建与赋值
void mat_creation_demo(/*Mat& image*/);
void QuickDemo::mat_creation_demo(/*Mat& image*/) {
//Mat m1, m2;
//m1 = image.clone();
//image.copyTo(m2);
//创建空白图形
Mat m3 = Mat::ones(Size(400, 400), CV_8UC3); //8位的无符号的3通道(改1则为单通道
//ones 改 zeros则初始化为0
//长度 = 通道数 * 宽度
m3 = Scalar(255, 0, 0); //给三个通道都赋值,单通道则 m3 = 127;
//m3初始化为蓝色
cout << "width:" << m3.cols << endl << "hight:" << m3.rows << endl << "channels:" << m3.channels() << endl;
//显示宽度,长度,通道数
//cout << m3 << endl;
Mat m4;
//m4 = m3; //直接赋值 则m4变,m3也变(同体
//m4 = m3.clone(); //m4为m3的克隆,m4变,m3不会变(不同体
m3.copyTo(m4); //把m3赋值给m4,m4为蓝色
m4 = Scalar(0, 255, 255); //改变m4的颜色为黄色
imshow("图像3", m3); //标题和图像名称 显示图像3 纯蓝色
imshow("图像4", m4);
}004.图像像素的读写操作
void pixel_visit_demo(Mat &image);
void QuickDemo::pixel_visit_demo(Mat &image) {
int dims = image.channels();
int h = image.rows;
int w = image.cols;
//数组下标访问像素值
/*
for (int row = 0; row < h; row++) {
for (int col = 0; col < w; col++) {
if (dims == 1) { //单通道的灰度图像
int pv = image.at(row, col); //得到像素值
image.at(row, col) = 255 - pv; //给像素值重新赋值(取反
}
if (dims == 3) { //三通道的彩色图像
Vec3b bgr = image.at(row, col); //opencv特定的类型,获取三维颜色,3个值
image.at(row, col)[0] = 255 - bgr[0];
image.at(row, col)[1] = 255 - bgr[1];
image.at(row, col)[2] = 255 - bgr[2]; //对彩色图像读取其像素值,并将其改写
}
}
}
*/
//指针访问模式
for (int row = 0; row < h; row++) {
uchar* current_row = image.ptr(row);
for (int col = 0; col < w; col++) {
if (dims == 1) { //单通道的灰度图像
int pv = image.at(row, col); //得到像素值
*current_row++ = 255 - pv; //给像素值重新赋值(取反
}
if (dims == 3) { //三通道的彩色图像
*current_row++ = 255 - *current_row; //指针每做一次运算,就向后移动一位
*current_row++ = 255 - *current_row;
*current_row++ = 255 - *current_row;
}
}
}
namedWindow("像素读写演示", WINDOW_FREERATIO);
imshow("像素读写演示", image);
//imwrite("E:/2021.9.26备份/图片/Camera Roll/003颜色取反.png", image); //保存
} 005.图像像素的算术操作(加减乘除4种不同的API实现
void operators_demo(Mat &image);
void QuickDemo::operators_demo(Mat &image) {
Mat dst = Mat::zeros(image.size(), image.type());
Mat m = Mat::zeros(image.size(), image.type());
dst = image - Scalar(50, 50, 50);
m = Scalar(50, 50, 50);
multiply(image, m, dst); //乘法操作 api
imshow("乘法操作", dst);
add(image, m, dst); //加法操作 api
imshow("加法操作", dst);
subtract(image, m, dst); //减法操作 api
imshow("减法操作", dst);
divide(image, m, dst); //除法操作 api
imshow("除法操作", dst);
//加法操作底层
/*
int dims = image.channels();
int h = image.rows;
int w = image.cols;
for (int row = 0; row < h; row++) {
for (int col = 0; col < w; col++) {
Vec3b p1 = image.at(row, col); //opencv特定的类型,获取三维颜色,3个值
Vec3b p2 = m.at(row, col);
dst.at(row, col)[0] = saturate_cast(p1[0] + p2[0]);
dst.at(row, col)[1] = saturate_cast(p1[1] + p2[1]);
dst.at(row, col)[2] = saturate_cast(p1[2] + p2[2]);
}
}
namedWindow("加法操作底层", WINDOW_FREERATIO);
imshow("加法操作底层", dst);
*/
} 006.滚动条-调整图像亮度
void tracking_bar_demo1(Mat &image);
Mat src, dst, m;
int lightness = 50;//定义初始化的亮度为50
static void on_track(int, void*) {
m = Scalar(lightness, lightness, lightness);//创建调整亮度的数值
add(src, m, dst);
//subtract(src, m, dst);//定义亮度变换为减
imshow("亮度调整", dst);//显示调整亮度之后的图片
}
void QuickDemo::tracking_bar_demo1(Mat &image) {
namedWindow("亮度调整", WINDOW_AUTOSIZE);
dst = Mat::zeros(image.size(), image.type());//图片的初始化创建一个和image大小相等,种类相同的图像
m = Mat::zeros(image.size(), image.type());//图片的初始化创建一个和image大小相等,种类相同的图像
src = image;//给src赋值
int max_value = 100;//定义最大值为100
createTrackbar("Value Bar", "亮度调整", &lightness, max_value, on_track);//调用函数实现功能
on_track(50, 0);
}007.滚动条-传递参数
void tracking_bar_demo2(Mat &image);
static void on_lightness(int b, void* userdata) {
Mat image = *((Mat*)userdata);
Mat dst = Mat::zeros(image.size(), image.type());
Mat m = Mat::zeros(image.size(), image.type());
m = Scalar(b, b, b);//创建调整亮度的数值
addWeighted(image, 1.0, m, 0, b, dst); //融合两张图 dst = image * 1.0 + m * 0 + b
imshow("亮度&对比度调整", dst);//显示调整亮度之后的图片
}
static void on_contrast(int b, void* userdata) {
Mat image = *((Mat*)userdata);
Mat dst = Mat::zeros(image.size(), image.type());
Mat m = Mat::zeros(image.size(), image.type());
double contrast = b / 100.0;
addWeighted(image, contrast, m, 0.0, 0, dst);
imshow("亮度&对比度调整", dst);//显示调整亮度之后的图片
}
void QuickDemo::tracking_bar_demo2(Mat& image) {
namedWindow("亮度&对比度调整", WINDOW_AUTOSIZE);
int lightness = 50;//定义初始化的亮度为50
int max_value = 100;//定义最大值为100
int contrast_value = 100;
createTrackbar("Value Bar", "亮度&对比度调整", &lightness, max_value, on_lightness, (void*)(&image));//调用函数实现功能
createTrackbar("Contrast Bar", "亮度&对比度调整", &contrast_value, 200, on_contrast, (void*)(&image));//调用函数实现功能
on_lightness(50, &image);
}008.键盘响应操作
void key_demo(Mat &image);
void QuickDemo::key_demo(Mat& image) {
Mat dst = Mat::zeros(image.size(), image.type());
while (true) {
char c = waitKey(100);//等待100ms(1s = 1000ms),做视频处理都是1
if (c == 27) { //按 esc 退出应用程序
break;
}
if (c == 49) { //key#1
cout << "you enter key #1" << endl;
cvtColor(image, dst, COLOR_BGR2GRAY); //按键盘1,则转换后为灰度图像
}
if (c == 50) { //key#2
cout << "you enter key #2" << endl;
cvtColor(image, dst, COLOR_BGR2HSV); //按键盘1,则转换后为HSV图像
}
if (c == 51) { //key#3
cout << "you enter key #3" << endl;
dst = Scalar(50, 50, 50);
cvtColor(image, dst, COLOR_BGR2HSV); //直接1到3会报错,则先转换为HSV图像
add(image, dst, dst); //按键盘1,则转换后为增加亮度后的图像
}
imshow("键盘响应",dst); //输出图像
}
}009.OpenCV自带颜色表操作
void color_style_demo(Mat& image);
void QuickDemo::color_style_demo(Mat& image) {
int colormap[] = { //共19种
COLORMAP_AUTUMN,
COLORMAP_BONE,
COLORMAP_CIVIDIS,
COLORMAP_DEEPGREEN,
COLORMAP_HOT,
COLORMAP_HSV,
COLORMAP_INFERNO,
COLORMAP_JET,
COLORMAP_MAGMA,
COLORMAP_OCEAN,
COLORMAP_PINK,
COLORMAP_PARULA,
COLORMAP_RAINBOW,
COLORMAP_SPRING,
COLORMAP_TWILIGHT,
COLORMAP_TURBO,
COLORMAP_TWILIGHT,
COLORMAP_VIRIDIS,
COLORMAP_TWILIGHT_SHIFTED,
COLORMAP_WINTER
};
Mat dst;
int index = 0; //初始化为指向0的位置
while (true) {
char c = waitKey(500);//等待半秒(1s = 1000ms),做视频处理都是1
if (c == 27) { //按 esc 退出应用程序
break;
}
if (c == 49) { //key#1 按下按键1时。保存图片到指定位置
cout << "you enter key #1" << endl;
imwrite("F:/文件夹/C++/OPENCV4入门学习/图/颜色表的成果.jpg", dst);
}
applyColorMap(image, dst, colormap[index % 19]);//循环展示19种图片(产生伪色彩图像)
index++;
imshow("循环播放", dst);
}
}010.图像像素的逻辑操作(与,或,非,异或
void bitwise_demo(Mat& image);
void QuickDemo::bitwise_demo(Mat& image) {
//绘制两张图
Mat m1 = Mat::zeros(Size(256, 256), CV_8UC3);
Mat m2 = Mat::zeros(Size(256, 256), CV_8UC3);
rectangle(m1, Rect(100, 100, 80, 80), Scalar(255, 255, 0), -1, LINE_8, 0);//-1 =》小于0为填充,大于0为绘制
// Rect(左上角x,左上角y,矩形长,矩形宽) |=》搞锯齿的(表示四领域或者八领域的绘制
//最后的参数0表示中心坐标 或 半径坐标的小数位
rectangle(m2, Rect(150, 150, 80, 80), Scalar(0, 255, 255), -1, LINE_8, 0);//小于0为填充,大于0为绘制
imshow("m1", m1);
imshow("m2", m2);
//进行逻辑操作
Mat dst;
bitwise_and(m1, m2, dst); //位操作 与
imshow("像素位操作 与", dst);
bitwise_or(m1, m2, dst); //位操作 或
imshow("像素位操作 或", dst);
// dst = ~image; //位操作 非(取反
bitwise_not(image, dst); //位操作 非(取反
imshow("像素位操作 非", dst);
bitwise_xor(m1, m2, dst); //位操作 异或
imshow("像素位操作 异或", dst);
}与,或,异或 效果如图:

非操作:
011.通道合并与分离
void channels_demo(Mat& image);
void QuickDemo::channels_demo(Mat& image) {
vectormv;//可存放Mat类型的容器
split(image, mv);//将多通道 拆分成 单通道(通道分离
//imshow("蓝色", mv[0]);
//imshow("绿色", mv[1]);
//imshow("红色", mv[2]);
// 三个通道分别为 B G R
// 0,1,2 三个通道分别代表 B G R
//关闭其中两个通道,则意味着 只开启剩余那个通道
Mat dst;
mv[0] = 0;
mv[2] = 0; // 关0,1则红色 关1,2则蓝色
merge(mv, dst);//合并mv和dst
imshow("绿色", dst);
int from_to[] = { 1,2,1,1,2,0 };
//把通道相互交换,第0->第2,第1->第1,第2->第0
mixChannels(&image, 1, &dst, 1, from_to, 3);//3表示有3对要交换(即3个通道
//参数为要进行混合的图像的地址,参数2为混合后图像的存放地址
imshow("通道混合", dst);
imshow("原图image不会变", image);
} 只开放绿色通道 / B与R交换后的通道混合
012.图像色彩空间转换(提取轮廓然后换绿幕
void inrange_demo(Mat& image);
void QuickDemo::inrange_demo(Mat& image) {
//提取任务的轮廓
Mat hsv;
cvtColor(image, hsv, COLOR_BGR2HSV);//先把RGB色彩空间转换到hsv的空间中
Mat mask;//其次提取图片的mask
inRange(hsv, Scalar(35, 43, 46), Scalar(77, 255, 255), mask);//通过inRange提取hsv色彩空间的颜色
//35,43,46根据图片表中的绿色最低来确定最小值(hmin,smin,vmim
//77,255,255 最大值
//参数一为低范围,参数二高范围
//将hsv中的由低到高的像素点提取出来并存储到mask中
imshow("mask", mask); //此时mask为白底
Mat redback = Mat::zeros(image.size(), image.type());
redback = Scalar(40, 40, 200); //红色背景图
bitwise_not(mask, mask); //取反变成黑底
imshow("mask", mask);
image.copyTo(redback, mask);//将mask中不为0部分(白色像素点)对应的原图 拷贝到 redback上,mask通过inRange得到
imshow("roi区域提取", redback);
}HSV色彩空间的颜色:

013.图像像素值统计(min,max,mean均值,standard deviation标准方差
void pixel_statistic_demo(Mat& image);
void QuickDemo::pixel_statistic_demo(Mat& image) {
double minv, maxv;
Point minLoc, maxLoc; //定义地址
vector mv; //可存放Mat类型的容器
split(image, mv); //将多通道 拆分成 单通道(通道分离
for (int i = 0; i < mv.size(); i++) {
//分别打印各个通道的数值
minMaxLoc(mv[i], &minv, &maxv, &minLoc, &maxLoc, Mat());//求出图像的最大值和最小值及其位置
//参数一:输入单通道的数组
//参数二:返回最小值的指针 参数三:返回最大值的指针
//参数四:返回最小值位置的指针 参数五:返回最大值位置的指针
cout << "No.channels:" << i << " minvalue:" << minv << " maxvalue:" << maxv << endl;
}
Mat mean, stddev;
meanStdDev(image, mean, stddev);//求出图像的均值的方差
cout << "mean:" << mean << endl;
cout << "stddev:" << stddev << endl;
} 014.图像几何形状绘制(圆,矩形,直线,椭圆
void drawing_demo(Mat& image);
void QuickDemo::drawing_demo(Mat& image) {
Rect rect; //矩形尺寸
rect.x = 200; //起始点x坐标
rect.y = 200; //起始点y坐标
rect.width = 150; //矩形宽度
rect.height = 200; //矩形高度
Mat bg = Mat::zeros(image.size(), image.type());
rectangle(bg, rect, Scalar(0, 0, 255), -1, 8, 0); //画矩形
//参数一:绘图的底图或画布名称 参数二:图片的起始,宽高
//参数三:填充颜色 参数四:>0为线宽,<0为填充
//参数五:领域填充(控制边缘锯齿 参数六:默认值为0
circle(bg, Point(350, 400), 25, Scalar(0, 255, 0), 2, LINE_AA, 0); //画圆
//参数二:图片中心的位置 参数三:表示圆的半径为25
line(bg, Point(100, 100), Point(350, 400), Scalar(255, 0, 0), 8, LINE_AA, 0); //画直线
//参数二:线段起点坐标 参数三:线段终点坐标 LINE_AA表示去掉锯齿
RotatedRect rrt; //角度构造
rrt.center = Point(200, 200); //中心点位置
rrt.size = Size(100, 200); //x正沿x正方向,y正沿y正方向(可以是负的
rrt.angle = 0.0; //顺时针的角度(0-360度
ellipse(bg, rrt, Scalar(255, 0, 255), 2, 8); //画椭圆
imshow("矩形,圆,直线,椭圆的绘制", bg);
}015.随机数与随机颜色
void random_demo();
void QuickDemo::random_demo() {
Mat canvas = Mat::zeros(Size(512, 512), CV_8UC3);//创建画布
int w = canvas.cols;
int h = canvas.rows;
RNG rng(12345); //产生随机数(12345为随机数的种子,默认的
while (true) {
char c = waitKey(10);//等待10ms(1s = 1000ms),做视频处理都是1
if (c == 27) { //按 esc 推出应用程序
break;
}
int x1 = rng.uniform(0, canvas.cols); //将随机坐标控制在画布范围内
int y1 = rng.uniform(0, canvas.rows);
int x2 = rng.uniform(0, w);
int y2 = rng.uniform(0, h);
int r = rng.uniform(0, 255); //将随机颜色控制在255范围内
int g = rng.uniform(0, 255); //将随机颜色控制在255范围内
int b = rng.uniform(0, 255); //将随机颜色控制在255范围内
//canvas = Scalar(0, 0, 0); //想要每次都只出现一条线而不是叠加,则加上此句
line(canvas, Point(x1, y1), Point(x2, y2), Scalar(r, g, b), 2, LINE_AA); //画直线
//参数二:线段起点坐标 参数三:线段终点坐标 2为线宽 LINE_AA表示去掉锯齿
imshow("随机绘制演示", canvas);
}
}016.多边形填充与绘制
void polyline_drawing_demo(Mat& image);
void QuickDemo::polyline_drawing_demo(Mat& image) {
Mat canvas = Mat::zeros(Size(512, 512), CV_8UC3);
Point p1(150, 100); //第一个点的坐标
Point p2(350, 200); // 二
Point p3(240, 300); // 三
Point p4(150, 300); // 四
Point p5(50, 200); // 五
vector pts; //搞一个容器,用来装 点
pts.push_back(p1); //将点放进容器内
pts.push_back(p2); //因 未初始化数组容量,所以要用 push_back 操作
pts.push_back(p3); //若 已初始化,可以用 数组下标 来操作
pts.push_back(p4);
pts.push_back(p5);
//fillPoly(canvas, pts, Scalar(122, 155, 255), 8, 0); //填充多边形
//polylines(canvas, pts, true, Scalar(90, 0, 255), 2, 8, 0); //绘制多边形
//参数一:画布 参数二:点集 参数三:一定要写true(封闭图形
//参数倒3:线宽(最少为1 参数倒2:线的渲染方式 参数倒1:相对左上角(0,0)的位置
//单个API搞定多边形的绘制和填充
vector> contours; //搞一个容器,用来装 多边形的点集
contours.push_back(pts); //将一个多边形的点集放进容器内,作为一个元素
drawContours(canvas, contours, -1, Scalar(0, 0, 255), -1); //参数倒1:<0表示填充,>0表示线宽
//参数二:多边形的点集 参数三:-1为绘制全部的多边形;0为绘制第一个,1为绘制第二个,以此类推
imshow("多边形绘制", canvas);
} 017.鼠标操作与响应(提取选中的ROI区域
void mouse_drawing_demo(Mat& image);
//选中的矩形区域提取
Point sp(-1, -1); //鼠标的起始位置
Point ep(-1, -1); //鼠标的结束位置
Mat temp;
static void on_draw(int event, int x, int y, int flags, void* userdata) {
//参数一(event)为鼠标事件
Mat image = *((Mat*)userdata);
if (event == EVENT_LBUTTONDOWN) { //若鼠标的左键按下
sp.x = x;
sp.y = y; //此时鼠标的起始位置坐标
cout << "start point" << sp << endl;
}
else if (event == EVENT_LBUTTONUP) { //若鼠标的左键抬起
ep.x = x;
ep.y = y; //此时鼠标的结束位置坐标
int dx = ep.x - sp.x;
int dy = ep.y - sp.y;
if (dx > 0 && dy > 0) { //若鼠标有移动过
Rect box(sp.x, sp.y, dx, dy);
imshow("ROI区域", image(box));
rectangle(image, box, Scalar(0, 0, 255), 2, 8, 0);
imshow("鼠标绘制", image); //这里是为了显示结果
sp.x = -1; //复位,为下一次做准备
sp.y = -1; //复位,为下一次做准备
}
}
else if (event == EVENT_MOUSEMOVE) { //若鼠标正在移动
if (sp.x > 0 && sp.y > 0) {
ep.x = x;
ep.y = y; //此时鼠标的结束位置坐标
int dx = ep.x - sp.x;
int dy = ep.y - sp.y;
if (dx > 0 && dy > 0) { //若鼠标有移动过
Rect box(sp.x, sp.y, dx, dy);
temp.copyTo(image); //为了不将鼠标移动过程中的框也显示出来
rectangle(image, box, Scalar(0, 0, 255), 2, 8, 0);
imshow("鼠标绘制", image); //这里是为了每次重新提取都将前面的覆盖
}
}
}
}
void QuickDemo::mouse_drawing_demo(Mat& image) {
namedWindow("鼠标绘制", WINDOW_AUTOSIZE);
setMouseCallback("鼠标绘制",on_draw, (void*)(&image));
//设置窗口是回调函数,参数二表示调用on_draw
imshow("鼠标绘制", image);
temp = image.clone();
}018.图像像素类型转换和归一化
void norm_demo(Mat& image);
void QuickDemo::norm_demo(Mat& image) {
Mat dst;
cout << image.type() << endl; //打印图片的类型
image.convertTo(image, CV_32F); //将image的数据转换成浮点型float32位数据
cout << image.type() << endl; //打印转换后的图片数据类型
normalize(image, dst, 1.0, 0, NORM_MINMAX); //进行归一化操作
//参数一:要进行归一化的图片 参数二:归一化后要输出的图片
//参数三:alpha 参数四:beta 参数五:归一化方法
cout << dst.type() << endl; //打印归一化后的图像的类型
imshow("图像的归一化", dst); //显示归一化后的图像
//CV_8UC3 原本为 3通道,每个通道8位的UC(无符号)类型
//CV_32FC3 转换后 3通道,每个通道32位的浮点数类型
/*
归一化方法:
NORM_L1(依据sum) b不用,a为归一化后矩阵的范数值
NORM_L2(依据单位向量为1) b不用,a为 同上
NORM_MINMAX(依据最大值) b不用,a为 同上
NORM_INF(依据min与max的差值) a为归一化后的最小值,b归一化后的最大值
*/
}019.图像放缩与插值
void resize_demo(Mat& image);
void QuickDemo::resize_demo(Mat& image) {
Mat zoomin, zoomout;
int h = image.rows;
int w = image.cols;
resize(image, zoomout, Size(w / 2, h / 2), 0, 0, INTER_LINEAR); // INTER_LINEAR 为线性插值
//若Size里的值没变,则按照参数四fx(水平轴)和参数五fy(垂直轴)来进行放缩操作
//参数六:插值的方法
imshow("zoomout", zoomout);
resize(image, zoomin, Size(w * 1.5, h * 1.5), 0, 0, INTER_LINEAR);
imshow("zoomin", zoomin);
}020.图像翻转
void flip_demo(Mat& image);
void QuickDemo::flip_demo(Mat& image) {
Mat dst;
flip(image, dst, 0); // 0 上下翻转 x对称
imshow("图像上下翻转", dst);
flip(image, dst, 1); // 1 左右翻转 y对称
imshow("图像左右翻转", dst);
flip(image, dst, -1); //-1 上下左右都翻转(相当于旋转180°)
imshow("图像上下左右翻转", dst);
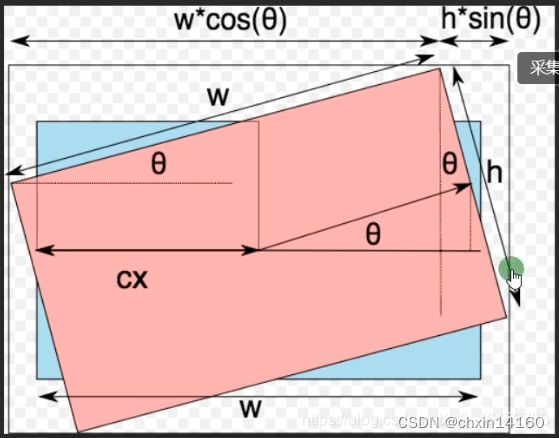
}021.图像旋转
void rotate_demo(Mat& image);
void QuickDemo::rotate_demo(Mat& image) {
Mat dst, M; //M为2*3的变换矩阵(旋转矩阵)
int w = image.cols; //图片宽度
int h = image.rows; //图片高度
M = getRotationMatrix2D(Point(w / 2, h / 2), 45, 1.0); //获得旋转矩阵 M
//参数一:原来图像的中心点位置 参数二:旋转角度(逆时针) 参数三:图像本身大小的放大缩小
double cos = abs(M.at(0, 0)); //取绝对值
double sin = abs(M.at(0, 1));
/*
[x'] = [ cos sin] * [x]
[y'] [-sin cos] [y],
M = [ cos sin 0]
[-sin cos 0], (第三列用来控制平移)
*/
double nw = cos * w + sin * h; //旋转后图像所占矩形的宽
double nh = sin * w + cos * h; //旋转后图像所占矩形的高
//更新 新的中心 (将新中心平移到正确位置上)
M.at(0, 2) += (nw / 2 - w / 2); //将矩形的宽高 加上偏差量 (新M的第一列最后的值)
M.at(1, 2) += (nh / 2 - h / 2); //将矩形的宽高 加上偏差量 (新M的第二列最后的值)
warpAffine(image, dst, M, Size(nw, nh), INTER_LINEAR, 0, Scalar(255, 255, 0)); //进行旋转
//参数四:原来图像的中心点位置 参数五:插值方式
//参数六:边缘的处理方式 参数七:边缘底图的颜色
//namedWindow("旋转演示", WINDOW_FREERATIO); //可调整显示图片的窗口大小
imshow("旋转演示", dst);
} 
022.视频文件摄像头使用
void video_demo1(Mat& image);
void QuickDemo::video_demo1(Mat& image) {
//读已有视频
VideoCapture capture("E:/2021.9.26备份/图片/Camera Roll/人脸素材.mp4");//读取视频地址
Mat frame; //定义一个二值化的 frame
while (true) {
capture.read(frame);
//flip(frame, frame, 1); // 1 左右翻转 y对称 (镜像)
if (frame.empty()) //如果读入失败
{
break; //若视频为空,则跳出操作
}
imshow("frame", frame); //显示视频
colorSpace_Demo(frame); //对视频调用之前的demo
int c = waitKey(1); //等待10ms(1s = 1000ms),做视频处理都是1
if (c == 27) { //按 esc 退出应用程序
break;
}
}
capture.release(); //释放相机的资源
/*
//调用电脑摄像头
VideoCapture capture(0);
Mat frame; //定义一个二值化的 frame
while (true) {
capture.read(frame);
if (frame.empty()) //如果读入失败
{
break; //若视频为空,则跳出操作
}
flip(frame, frame, 1); // 1 左右翻转 y对称 (镜像)
imshow("frame", frame); //显示视频
int c = waitKey(10); //等待10ms(1s = 1000ms),做视频处理都是1
if (c == 27) { //按 esc 退出应用程序
break;
}
}
*/
}023.视频处理与保存
void video_demo2(Mat& image);
void QuickDemo::video_demo2(Mat& image) {
//视频的属性:SD(标清),HD(高清),UHD(超清),蓝光。
VideoCapture capture("E:/2021.9.26备份/图片/Camera Roll/人脸素材.mp4");//读取视频地址
int frame_width = capture.get(CAP_PROP_FRAME_WIDTH); //获取视频的宽度
int frame_height = capture.get(CAP_PROP_FRAME_HEIGHT); //获取视频的高度
int count = capture.get(CAP_PROP_FRAME_COUNT); //获取视频总的帧数
//fps是衡量处理视频的能力 (一秒钟处理多少张图片的能力,处理速度越快则越好)
double fps = capture.get(CAP_PROP_FPS);
cout << "frame width:" << frame_width << endl;
cout << "frame height:" << frame_height << endl;
cout << "FPS:" << fps << endl;
cout << "Number of frame:" << count << endl;
VideoWriter writer("F:/文件夹/C++/OPENCV4入门学习/图/test.mp4", capture.get(CAP_PROP_FOURCC), fps, Size(frame_width, frame_height), true);
//参数一:保存地址 参数二:获取图片的格式(编码方式) 参数三:图片是帧数 参数四:视频宽高 参数五:与原来颜色保持一致
//等全部运行完再去查看视频是否保存成功
Mat frame;
while (true) {
capture.read(frame);
//flip(frame, frame, 1); // 1 左右翻转 y对称 (镜像)
if (frame.empty()) //如果读入失败
{
break; //若视频为空,则跳出操作
}
imshow("frame", frame); //显示视频
colorSpace_Demo(frame); //对视频调用之前的demo
writer.write(frame);
int c = waitKey(1); //等待10ms(1s = 1000ms),做视频处理都是1
if (c == 27) { //按 esc 退出应用程序
break;
}
}
//release
writer.release();
capture.release(); //释放相机的资源
}024.图像直方图
void histogram_demo(Mat& image);
void QuickDemo::histogram_demo(Mat& image) {
//三通道分离
vector bgr_plane;
split(image, bgr_plane);
//定义参数变量
const int channels[1] = { 0 };
const int bins[1] = { 256 }; //总共 256 个灰度级别
float hranges[2] = { 0,255 }; //每个通道的取值范围是 0 到 255
const float* ranges[1] = { hranges };
Mat b_hist;
Mat g_hist;
Mat r_hist;
//计算 Blue,Green,Red 通道的直方图
calcHist(&bgr_plane[0], 1, 0, Mat(), b_hist, 1, bins, ranges); //第一个通道
calcHist(&bgr_plane[1], 1, 0, Mat(), g_hist, 1, bins, ranges);
calcHist(&bgr_plane[2], 1, 0, Mat(), r_hist, 1, bins, ranges);
//参数一:要计算直方图的数据 参数二:1表示只有一张图(输入图像的格式)
//参数三:需要统计直方图的第几个通道 参数四:掩模,mask必须是8位的数组且和参数一的大小一致
//参数五:b_hist表示直方图的输出 参数六:1表示维度是一维的(输出直方图的维度dims)
//参数七:直方图中每个维度需分成的区间个数 参数八:ranges表示直方图的取值范围(区间)
//显示直方图
int hist_w = 512; //设置 画布宽度 为512
int hist_h = 400; //设置 画布高度 为400
int bin_w = cvRound((double)hist_w / bins[0]); //每个 bin 占的宽度
//cvRound()四舍五入返回数值
Mat histImage = Mat::zeros(hist_h, hist_w, CV_8UC3); //创建画布
//归一化直方图数据(归一化到大小一致的范围内)
normalize(b_hist, b_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat()); //histImage.rows是为了不超出画布许可的高度范围
normalize(g_hist, g_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
normalize(r_hist, r_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
//参数一:要进行归一化的图片 参数二:归一化后要输出的图片
//参数三:alpha 参数四:beta 参数五:归一化方法
//绘制直方图曲线
for (int i = 1; i < bins[0]; i++) { //每个bin占2个像素的位置
line(histImage, Point(bin_w * (i - 1), hist_h - cvRound(b_hist.at(i - 1))),
Point(bin_w * (i), hist_h - cvRound(b_hist.at(i))), Scalar(255, 0, 0), 2, 3, 0);
line(histImage, Point(bin_w * (i - 1), hist_h - cvRound(g_hist.at(i - 1))),
Point(bin_w * (i), hist_h - cvRound(g_hist.at(i))), Scalar(0, 255, 0), 2, 3, 0);
line(histImage, Point(bin_w * (i - 1), hist_h - cvRound(r_hist.at(i - 1))),
Point(bin_w * (i), hist_h - cvRound(r_hist.at(i))), Scalar(0, 0, 255), 2, 3, 0);
//从前一个位置到当前位置连上一条线
}
//显示直方图
namedWindow("Histogram Demo", WINDOW_AUTOSIZE);
imshow("Histogram Demo", histImage);
}
025.二维直方图
void histogram_2d_demo(Mat& image);
void QuickDemo::histogram_2d_demo(Mat& image) {
//2D直方图
Mat hsv, hs_hist;
cvtColor(image, hsv, COLOR_BGR2HSV); //先把RGB色彩空间转换到hsv的空间中
int hbins = 30, sbins = 32;
int hist_bins[] = { hbins, sbins }; //h和s这两个维度需分成的 区间个数
float h_range[] = { 0,180 }; //h的取值范围
float s_range[] = { 0,256 }; //s的取值范围
const float* hs_ranges[] = { h_range, s_range };
int hs_channels[] = { 0,1 };
//计算通道的直方图
calcHist(&hsv, 1, hs_channels, Mat(), hs_hist, 2, hist_bins, hs_ranges, true, false);
//参数一:要计算直方图的数据 参数二:1表示只有一张图(输入图像的格式)
//参数三:需要统计直方图的第几个通道(前两个) 参数四:掩模,mask必须是8位的数组且和参数一的大小一致
//参数五:b_hist表示直方图的输出 参数六:2表示维度是二维的(输出直方图的维度dims)
//参数七:直方图中每个维度需分成的区间个数 参数八:hs_ranges表示直方图的取值范围(区间)
//参数九:是否对得到的直方图进行归一化处理 参数十:在多个图像时,是否累计计算像素值的个数
double maxVal = 0;
minMaxLoc(hs_hist, 0, &maxVal, 0, 0); //寻找最大值和最小值及其位置(这里先找到最大值)
//参数一:输入单通道的数组
//参数二:返回最小值的指针 参数三:返回最大值的指针
//参数四:返回最小值位置的指针 参数五:返回最大值位置的指针
int scale = 10;
Mat hist2d_image = Mat::zeros(sbins * scale, hbins * scale, CV_8UC3); //创建空白图像
for (int h = 0; h < hbins; h++) {
for (int s = 0; s < sbins; s++) {
float binVal = hs_hist.at(h, s);
int intensity = cvRound(binVal * 255 / maxVal);
rectangle(hist2d_image, Point(h * scale, s * scale),
Point((h + 1) * scale - 1, (s + 1) * scale - 1), Scalar::all(intensity), -1);
}
}
//显示直方图
//applyColorMap(hist2d_image, hist2d_image, COLORMAP_JET); //产生伪色彩图像
namedWindow("H-S Histogram", WINDOW_AUTOSIZE);
imshow("H-S Histogram", hist2d_image);
//imwrite("F:/文件夹/C++/OPENCV4入门学习/图/hist_2d.png", hist2d_image);
} 026.直方图均衡化
void histogram_eq_demo(Mat& image);
void QuickDemo::histogram_eq_demo(Mat& image) {
//直方图均衡化 (目的是对比度拉伸,即 对比度会更强)
//用途:用于图像增强,人脸检测,卫星遥感(提升图像质量)。
//opencv中,均衡化的图像只支持单通道
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY);
imshow("灰度图像", gray);
Mat dst;
equalizeHist(gray, dst);
imshow("直方图均衡化演示", dst);
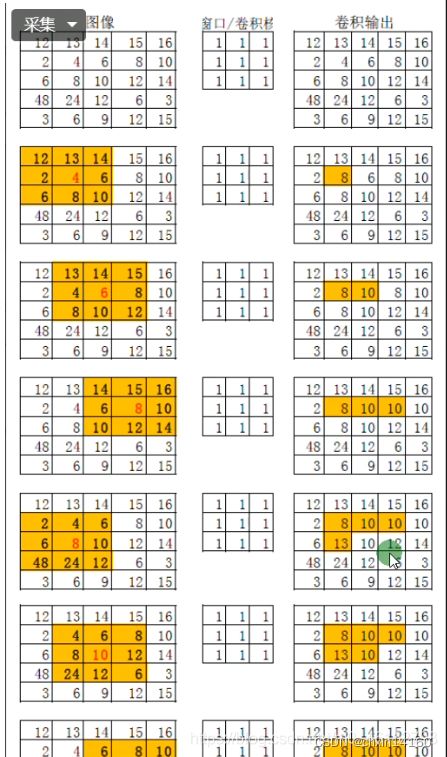
}027.图像卷积操作(会变模糊,且卷积核尺寸越大则越模糊
void blur_demo(Mat& image);
void QuickDemo::blur_demo(Mat& image) { //会变模糊,且卷积核尺寸越大则越模糊
Mat dst;
blur(image, dst, Size(15, 15), Point(-1, -1)); //均值滤波 均值模糊
//参数三:卷积核的大小 参数四:卷积的起始点(Point(-1, -1)则默认取核的中心)
// 参数三中:
//Size(15, 1) 左右晃动的模糊(只有行的话
//Size(1, 15) 上下 ( 列
imshow("图像卷积操作", dst);
} 
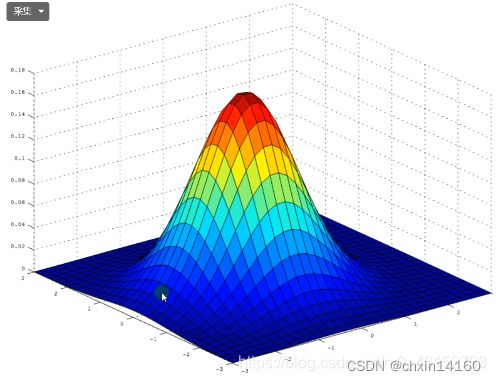
028.高斯模糊
void gaussian_blur_demo(Mat& image);
void QuickDemo::gaussian_blur_demo(Mat& image) {
//中心值最大,离中心越远值越小
Mat dst;
GaussianBlur(image, dst, Size(5, 5), 15);
//参数三:高斯矩阵的大小(正数且奇数)
//参数四:sigmaX 和 sigmaY 为15
//(参数三和四都 值越大则越模糊,且参数四的影响更明显)
imshow("高斯模糊", dst);
}高斯卷积数学表达式说明:

高斯卷积的图像说明:
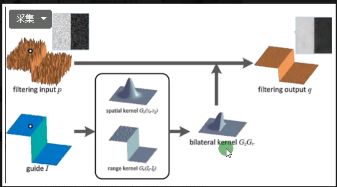
029.高斯双边模糊(可磨皮操作
(同时考虑空间临近信息与颜色相似信息,在滤除噪声、平滑图像的同时,又做到边缘保存)
(高斯双边模糊:可以在去除噪声的同时,保持边缘信息相对清晰。但是,相比于大多数滤波器,双边滤波的速度是非常慢的。)
void bifilter_demo(Mat& image);
void QuickDemo::bifilter_demo(Mat& image) { //可做磨皮操作
Mat dst;
bilateralFilter(image, dst, 0, 100, 10);
//参数三:色彩空间 参数四:坐标空间 (双边是指 色彩空间 和 坐标空间
namedWindow("高斯双边模糊", WINDOW_AUTOSIZE);
imshow("高斯双边模糊", dst);
}
030.案例:实时人脸检测
(24条消息) openCV4.0 C++ 实战:人脸检测 学习笔记(自用 代码+注释)_chxin14160的博客-CSDN博客
代码总结
(24条消息) openCV4.0 C++ 快速入门30讲学习笔记(自用 代码+注释)_chxin14160的博客-CSDN博客