pytorch搭建深度学习网络
目录
1、tensor
2、损失函数
1)nn.CrossEntropyLoss
2)nn.L1Loss
3)nn.MSELoss
3、自动求导Autograd
4、网络模型库torchvision
1)加载预训练模型
2)自己模型的保存与加载
5、数据处理
1)数据加载
2)GPU加速
6、导出onnx
1)导出onnx
2)测试onnx
二、网络骨架解析
1、深度学习网络的基本组成
2、常见网络结构
1)VGG
2)Inception
3)ResNet
3、经典物体检测框架
1)两阶经典检测器Faster RCNN
一、Pytorch基础
根据博主的《深度学习入门-基于Python的理论与实现》读书笔记可知,深度学习网络需要经过多次前向传播和反向传播的过程,其中前向传播需要使用损失函数判断训练效果、收敛性,反向传播是一个梯度更新过程(也就是求导过程)。pytorch中封装了多个模块,实现以上功能,另外,还提供了优化器、网络模型库等模块。
1、tensor
张量,是Pytorch中的基本操作对象,可以看作是包含单一数据类型元素的多维矩阵,与numpy的ndarrays很相似,互相之间可以自由转换,但是tensor还支持GPU加速。
#注意,a、b共享地址,修改其中一个,另一个也会改变
import torch
a = torch.ones(5)
b = a.numpy()
import numpy as np
a = np.ones(5)
b = torch.from_numpy(a)创建张量,可以使用下标索引
a = torch.Tensor(2,2)#基础tensor
b = torch.DoubleTensor(2,2)#指定类型
c = torch.Tensor([[1,2],[3,4]]) #使用list创建
d = torch.zeros(2,2) #默认值为0
e = torch.ones(2,2) #默认值为1
f = torch.eye(2,2) #对角张量
g = torch.randn(2,2) #随机张量
h = torch.randperm(n) #随机排列张量,0-n整数,随机排列的一维张量2、损失函数
pytorch在torch.nn及torch.nn.functional中包含了各种损失函数,通常来讲,损失函数不含有可学习的参数。
对于同一种损失函数,使用nn.xx或nn.functional.xx来实现,其功能是一样的。两者的关系在于torch.nn.functional中直接写了函数的实现,而torch.nn中是用类封装了torch.nn.functional中的函数。 因此torch.nn需要先实例化,再调用函数,而torch.nn.functional可以直接调用函数。一般来讲,直接使用torch.nn就够了,个人觉得尽量使用torch.nn,但是由于torch.nn多了一层类的封装,灵活性不如torch.nn.functional,所以有时也需要使用到。
常用损失函数:
1)nn.CrossEntropyLoss
交叉熵:它主要刻画的是实际输出(概率)与期望输出(概率)的距离,也就是交叉熵的值越小,两个概率分布就越接近。假设概率分布p为期望输出,概率分布q为实际输出, ![]() 为交叉熵,则
为交叉熵,则
![]()
#CrossEntropyLoss()
criterion = nn.CrossEntropyLoss()
input = torch.Tensor([[-0.7715, -0.6205, -0.2562]])
target = torch.tensor([0])
output = criterion (input, target)2)nn.L1Loss
![]()
#L1Loss
loss = nn.L1Loss(reduction='sum')
input = torch.tensor([1., 2, 3, 4])
target = torch.tensor([4., 5, 6, 7])
output = loss(input, target)3)nn.MSELoss
![]()
#MSELoss
a = torch.tensor([1., 2, 3, 4])
b = torch.tensor([4., 5, 6, 7])
loss_fn = nn.MSELoss(reduce=True, size_average=True)
loss = loss_fn(a, b)3、自动求导Autograd
基于链式法则,自动求取反向传播过程中需要的导数。这里需要知道tensor的一个属性requires_grad,默认为False。
参数requires_grad 的含义及标志位说明:
1.如果对于某 变量 x ,其 x.requires_grad == True , 则表示它可以参与求导,也可以从它向后求导。默认情况下,一个新的Variables 的 requires_grad 和 volatile 都等于 False 。
2.requires_grad == True 具有传递性,例如:
x.requires_grad == True ,y.requires_grad == False , z=f(x,y)
则, z.requires_grad == True。
3.凡是参与运算的变量(包括 输入量,中间输出量,输出量,网络权重参数等),都可以设置 requires_grad 。
4.volatile==True 就等价于 requires_grad==False 。 volatile==True 同样具有传递性。一般只用在inference(推理)过程中。 若是某个过程,从 x 开始都只需做预测,不需反传梯度的话,那么只需设置x.volatile=True ,那么 x 以后的运算过程的输出均为 volatile==True ,即 requires_grad==False 。
由于inference 过程不必backward(),所以requires_grad 的值为False 或 True,对结果是没有影响的,但是对程序的运算效率有直接影响;因此,在inference过程中,使用volatile=True ,就不必把运算过程中所有参数都手动设一遍requires_grad=False 了,方便快捷 。
5.detach() :如果 x 为中间输出,x’ = x.detach 表示创建一个与 x 相同,但requires_grad==False 的variable,(实际上是把x’ 以前的计算图 grad_fn 都消除了),x’ 也就成了叶节点。原先反向传播时,回传到x时还会继续,而现在回到x’处后,就结束了,不继续回传求到了。另外值得注意,x (variable类型) 和 x’ (variable类型)都指向同一个Tensor ,即 x.data,因此,detach_() 表示不创建新变量,而是直接修改 x 本身。
6.retain_graph:每次 backward() 时,默认会把整个计算图free掉。一般情况下是每次迭代,只需一次 forward() 和一次 backward() ,前向运算forward() 和反向传播backward()是成对存在的,一般一次backward()也是够用的。但是不排除,由于自定义loss等的复杂性,需要一次forward()之后,通过多个不同loss的backward()来累积同一个网络的grad,进行参数更新。于是,若在当前backward()后,不执行forward() 而可以执行另一个backward(),需要在当前backward()时,指定保留计算图,即backward(retain_graph)。参考链接:PyTorch中关于backward、grad、autograd的计算原理的深度剖析_Yale-曼陀罗-CSDN博客
调用.backward()时会从模型的output开始反向计算,直到前一个变量的requires_grad=False时停止。
注意,模型输出Output的requires_grad=True,而用户定义的输入值通常为False。
官网示例如下:
import torch
# N is batch size; D_in is input dimension;
# H is hidden dimension; D_out is output dimension.
N, D_in, H, D_out = 64, 1000, 100, 10
# Create random Tensors to hold inputs and outputs
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
# Use the nn package to define our model as a sequence of layers. nn.Sequential
# is a Module which contains other Modules, and applies them in sequence to
# produce its output. Each Linear Module computes output from input using a
# linear function, and holds internal Tensors for its weight and bias.
# 最简单的只有1层隐藏层的序惯模型
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.ReLU(),
# 最后一层后面也要加逗号——————,
torch.nn.Linear(H, D_out),
)
# loss_function定义 size_average的说明见上面,也就是只算每个batch size的总loss。
loss_fn = torch.nn.MSELoss(size_average=False)
learning_rate = 1e-4
# 相当于将batchsize为64的数据喂入模型500次,即epoch=500
# 这里的权值更新很直观,torch.no_grad()每个参数直接执行 param -= learning_rate * param.grad
for t in range(500):
# Forward pass: compute predicted y by passing x to the model. Module objects
# override the __call__ operator so you can call them like functions. When
# doing so you pass a Tensor of input data to the Module and it produces
# a Tensor of output data.
# 0.4.0版本已经将 Variable 和 Tensor合并,统称为 Tensor
y_pred = model(x)
# Compute and print loss. We pass Tensors containing the predicted and true
# values of y, and the loss function returns a Tensor containing the
# loss.
loss = loss_fn(y_pred, y)
print('round', t+1, loss.item())
# Zero the gradients before running the backward pass.
model.zero_grad()
# Backward pass: compute gradient of the loss with respect to all the learnable
# parameters of the model. Internally, the parameters of each Module are stored
# in Tensors with requires_grad=True, so this call will compute gradients for
# all learnable parameters in the model.
loss.backward()
# 手动调整模型参数 当然,我们可以用optim包去定义Optimizer并自动帮助我们更新权值。optim包里包括了SGD+momentum, RMSProp, Adam等常见的深度学习优化算法.
with torch.no_grad():
for param in model.parameters():
param -= learning_rate * param.grad nn.optim中包含了各种常见的优化算法,包括常用算法包括随机梯度下降算法SGC(Stochastic Gradient Descent)、Adam(Adaptive Moment Estimation)等。
SGD是一种梯度下降法,是指沿着梯度下降的方向求解极小值, 一般用于求解最小二乘问题。通常以一个小批次数据为单位,可计算一个批次的梯度,然后反向传播。优点是只需要小批量数据即可实现,计算量小,收敛速度快。缺点是依赖一个较好的初始学习率,但是这个值不直观,不容易选择,另外容易陷入局部最小。为了解决第二个缺点,通常的做法是增加动量,也就是当此次梯度方向与上次相同时,梯度会变大,会加快收敛,而反之,梯度会变小,抑制震荡,增加稳定性。由于在训练的中后期,梯度会在局部极小值周围震荡,此时梯度接近0,但动量的存在使得梯度更新不是0,才有可能跳出局部最小。
Adam利用梯度的一阶矩与二阶矩动态地调整每一个参数的学习率,是一种学习率自适应算法,优点在于,经过调整后,每一次迭代的学习率都在一个确定范围内,使得参数更新更加平稳。此外,还可以使模型更快受凉,尤其适用于一些深层网络。
下面的代码采用optim包的优化器更新权值的实例。
import torch
# N is batch size; D_in is input dimension;
# H is hidden dimension; D_out is output dimension.
N, D_in, H, D_out = 64, 1000, 100, 10
# Create random Tensors to hold inputs and outputs
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
# Use the nn package to define our model and loss function.
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.ReLU(),
torch.nn.Linear(H, D_out),
)
loss_fn = torch.nn.MSELoss(size_average=False)
# Use the optim package to define an Optimizer that will update the weights of
# the model for us. Here we will use Adam; the optim package contains many other
# optimization algoriths. The first argument to the Adam constructor tells the
# optimizer which Tensors it should update.
learning_rate = 1e-4
# 优化器,AdamOptimizer
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
for t in range(500):
# Forward pass: compute predicted y by passing x to the model.
y_pred = model(x)
# Compute and print loss.
loss = loss_fn(y_pred, y)
print(t, loss.item())
# Before the backward pass, use the optimizer object to zero all of the
# gradients for the variables it will update (which are the learnable
# weights of the model). This is because by default, gradients are
# accumulated in buffers( i.e, not overwritten) whenever .backward()
# is called. Checkout docs of torch.autograd.backward for more details.
# 原来是model.zero_grad()
optimizer.zero_grad()
# Backward pass: compute gradient of the loss with respect to model
# parameters
loss.backward()
# 调用Optimizer的step function来更新Model的权值。
optimizer.step()4、网络模型库torchvision
torchvision.models提供了众多经典网络结构与预训练模型,如VGG、ResNet等,利用这些模型可以快速搭建物体检测网络。
1)加载预训练模型
可以从官网加载预训练好的模型:
import torchvision.models as models
#第一种,加载完整模型
model= models.resnet50(pretrained=True)
#第二种,加载模型结构,但不包含预训练参数
model = models.resnet50(pretrained=False)
#第三种,加载模型结构和部分预训练参数
resnet50 = models.resnet50(pretrained=True)
model = Net(...) #Net是自己定义的模型
pretrained_dict =resnet50.state_dict() #读取预训练模型参数,字典格式(键值)
model_dict = model.state_dict()
pretrained_dict = {k: v for k, v in pretrained_dict.items() if k in model_dict} #将pretrained_dict里不属于model_dict的键剔除掉
model_dict.update(pretrained_dict) #更新model_dict
model.load_state_dict(model_dict) #加载参数从上面第三种方式不难发现,我们也可以从本地加载预训练模型:
import torchvision.models as models
model = models.vgg16(pretrained=False) #加载网络结构
pre = torch.load(r'.\kaggle_dog_vs_cat\pretrain\vgg16-397923af.pth') #从本地预训练模型读取参数
model.load_state_dict(pre) #将参数赋予自己的模型通用下载网址vision/torchvision/models at main · pytorch/vision · GitHub
常用模型及地址
Resnet:
model_urls = {
'resnet18': 'https://download.pytorch.org/models/resnet18-5c106cde.pth',
'resnet34': 'https://download.pytorch.org/models/resnet34-333f7ec4.pth',
'resnet50': 'https://download.pytorch.org/models/resnet50-19c8e357.pth',
'resnet101': 'https://download.pytorch.org/models/resnet101-5d3b4d8f.pth',
'resnet152': 'https://download.pytorch.org/models/resnet152-b121ed2d.pth',
}
inception:
model_urls = {
# Inception v3 ported from TensorFlow
'inception_v3_google': 'https://download.pytorch.org/models/inception_v3_google-1a9a5a14.pth',
}
Densenet:
model_urls = {
'densenet121': 'https://download.pytorch.org/models/densenet121-a639ec97.pth',
'densenet169': 'https://download.pytorch.org/models/densenet169-b2777c0a.pth',
'densenet201': 'https://download.pytorch.org/models/densenet201-c1103571.pth',
'densenet161': 'https://download.pytorch.org/models/densenet161-8d451a50.pth',
}
Alexnet:
model_urls = {
'alexnet': 'https://download.pytorch.org/models/alexnet-owt-4df8aa71.pth',
}
vggnet:
model_urls = {
'vgg11': 'https://download.pytorch.org/models/vgg11-bbd30ac9.pth',
'vgg13': 'https://download.pytorch.org/models/vgg13-c768596a.pth',
'vgg16': 'https://download.pytorch.org/models/vgg16-397923af.pth',
'vgg19': 'https://download.pytorch.org/models/vgg19-dcbb9e9d.pth',
'vgg11_bn': 'https://download.pytorch.org/models/vgg11_bn-6002323d.pth',
'vgg13_bn': 'https://download.pytorch.org/models/vgg13_bn-abd245e5.pth',
'vgg16_bn': 'https://download.pytorch.org/models/vgg16_bn-6c64b313.pth',
'vgg19_bn': 'https://download.pytorch.org/models/vgg19_bn-c79401a0.pth',
}2)自己模型的保存与加载
有两种方法,第一种只保存和加载模型中的参数
#保存
torch.save(resnet50.state_dict(),'ckp/model.pth')
#加载
resnet=resnet50(pretrained=True)
resnet.load_state_dict(torch.load('ckp/model.pth'))第二种同时保存和加载模型的结构和参数
# 保存
torch.save (model, 'ckp/model.pth')
# 加载
model = torch.load('ckp/model.pth')5、数据处理
常见公开数据集包括ImageNet、PASCAL VOC、COCO等。
1)数据加载
分为三步,继承Dataset类(获取可迭代的数据集),数据变换与增强torchvision.transforms、继承dataloader(实际使用的实例)。
继承Dataset并重写__len__()和__getitem__()函数,可以实现数据集迭代的底层模块。
from torch.utils.data import Dataset
class my_data(Dataset):
def __init__(self, image_path, annotation_path, transform=None):
# 初始化,读取数据集
def __len__(self):
# 获取数据集的总大小
def __getitem__(self, id):
# 对于指定的id,读取并返回该数据Dataset只是将数据集加载到了实例中,实际使用时,数据集中的图片可能存在大小不一等情况,需要进行一些处理。
from torchvision import transforms
#可以将transforms集合到Dataset中,并使用Compose将多个变换整合在一起
dataset = my_data("your image path", "your annotation path", transforms=
transforms.Compose([
transforms.Resize(256)#将图像最短边缩小至256,宽高比不变
transforms.RandomHorizontalFlip()#以0.5的概率翻转指定的PIL图像
transforms.ToTensor()#将PIL图像转换为Tensor,元素区间从[0,255]归一到[0,1]
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])#进行mean与std为0.5的标准化
]))经过前两步可以获取每一个变换后的样本,但是仍然无法进行批处理、随机选取等操作,因此还需要进一步封装。
from torch.utils.data import Dataloader
dataloader = Dataloader(dataset, batch_Size=4, shuffle=True, num_workers=4)
#第一种方式
data_iter = iter(dataloader)
for step in range(iters_per_epoch):
data = next(data_iter)
#第二种方式
for idx, (img, label) in enumerate(dataloader)
#这里的(img, label)与dataset中__getitem__函数的返回值对应2)GPU加速
可以使用torch.cuda.is_available()来判断当前环境下GPU是否可用,对于Tensor和模型,可以直接调用cuda()方法将数据转移到GPU上运行,还可以使用具体数字指定转移到哪一个GPU上。
import torch
from torchvision import models
a = torch.randn(3,3)
b = models.vgg16()
if torch.cuda.is_available():
a = a.cuda()
b = b.cuda(1)#第一种方式指定到GPU1
#第二种方式,指定到GPU1
device = torch.device("cuda:1")
c = torch.randn(3, 3 device = device)
6、导出onnx
1)导出onnx
Open Neural Network Exchange(ONNX,开放神经网络交换)格式,是一个用于表示深度学习模型的标准,可使模型在不同框架之间进行转移。
ONNX是一种针对机器学习所设计的开放式的文件格式,用于存储训练好的模型。它使得不同的人工智能框架(如Pytorch, MXNet)可以采用相同格式存储模型数据并交互。 ONNX的规范及代码主要由微软,亚马逊 ,Facebook 和 IBM 等公司共同开发,以开放源代码的方式托管在Github上。目前官方支持加载ONNX模型并进行推理的深度学习框架有: Caffe2, PyTorch, MXNet,ML.NET,TensorRT 和 Microsoft CNTK,并且 TensorFlow 也非官方的支持ONNX。---维基百科
因此,为了完成模型的部署,有时需要将pth文件转换成onnx。
import torch
model_path = r"L:\testmodel\model\model.pth" # 待转换的模型
onnx_path = r"L:\testmodel\model\model.onnx" # 存放onnx模型的位置
model = torch.load(model_path)
model.eval()
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
input = torch.ones(1,3,224,224).to(device)
torch.onnx.export(model, input. onnx_path,
opset_version=10,
verbose=True, # 打印网络结构
input_names=["input"],
output_names=["output"],
dynamic_axes={"input": {0: "batch_size"}, # 动态维度
"output": {0: "batch_size"}})
运行成功后就类似如下
D:\Anaconda3\envs\pytorch\python.exe L:/testmodel/pth_2_onnx.py
graph(%input_1 : Float(1, 3, 224, 224),
%conv1.weight : Float(16, 3, 5, 5),
%conv1.bias : Float(16),
%conv2.weight : Float(32, 16, 5, 5),
%conv2.bias : Float(32),
%fc1.weight : Float(120, 89888),
%fc1.bias : Float(120),
%fc2.weight : Float(84, 120),
%fc2.bias : Float(84),
%fc3.weight : Float(2, 84),
%fc3.bias : Float(2)):
%11 : Float(1, 16, 220, 220) = onnx::Conv[dilations=[1, 1], group=1, kernel_shape=[5, 5], pads=[0, 0, 0, 0], strides=[1, 1]](%input_1, %conv1.weight, %conv1.bias), scope: LeNet/Conv2d[conv1]
%12 : Float(1, 16, 220, 220) = onnx::Relu(%11), scope: LeNet
%13 : Float(1, 16, 110, 110) = onnx::MaxPool[kernel_shape=[2, 2], pads=[0, 0, 0, 0], strides=[2, 2]](%12), scope: LeNet/MaxPool2d[pool1]
%14 : Float(1, 32, 106, 106) = onnx::Conv[dilations=[1, 1], group=1, kernel_shape=[5, 5], pads=[0, 0, 0, 0], strides=[1, 1]](%13, %conv2.weight, %conv2.bias), scope: LeNet/Conv2d[conv2]
%15 : Float(1, 32, 106, 106) = onnx::Relu(%14), scope: LeNet
%16 : Float(1, 32, 53, 53) = onnx::MaxPool[kernel_shape=[2, 2], pads=[0, 0, 0, 0], strides=[2, 2]](%15), scope: LeNet/MaxPool2d[pool2]
%17 : Float(1, 89888) = onnx::Flatten[axis=1](%16), scope: LeNet
%18 : Float(1, 120) = onnx::Gemm[alpha=1, beta=1, transB=1](%17, %fc1.weight, %fc1.bias), scope: LeNet/Linear[fc1]
%19 : Float(1, 120) = onnx::Relu(%18), scope: LeNet
%20 : Float(1, 84) = onnx::Gemm[alpha=1, beta=1, transB=1](%19, %fc2.weight, %fc2.bias), scope: LeNet/Linear[fc2]
%21 : Float(1, 84) = onnx::Relu(%20), scope: LeNet
%output_1 : Float(1, 2) = onnx::Gemm[alpha=1, beta=1, transB=1](%21, %fc3.weight, %fc3.bias), scope: LeNet/Linear[fc3]
return (%output_1)
Process finished with exit code 0遇到的问题:
cannot insert a tensor that requires grad as a constant解决方式:在构建模型的时候,如果需要使用到List添加模型的层,就必须使用nn.ModuleList代替list,否则虽然模型可以正常训练,但是导出onnx时无法解析。
couldn't export python operator SwishImplementation解决方式:这是efficientnet本身的问题,他有两个swich函数,分别用于training和exporting。对模型的efficientnet部分调用.set_swish(memory_efficient=False)。
2)测试onnx
想要验证onnx模型与原模型是否一致可以使用onnx和onnxruntime库。
import torch
import onnx
import onnxruntime
onnx_path = r"L:\testmodel\model\model.onnx" # 存放onnx模型的位置
model = onnx.load(onnx_path)
onnx.checker.check_model(onnx_model)
output = onnx_model.graph.output # 打印onnx模型的输入输出维度
print(output)
img_data = torch.ones(1,3,224,224).numpy()
sess = onnxruntime.InferenceSession(onnx_path)
outputs = sess.run(output_list, {"input": img_data}) # 推理并打印输出结果
print(outputs)二、网络骨架解析
1、深度学习网络的基本组成
详见《深度学习入门-基于Python的理论与实现》读书笔记第七章。
2、常见网络结构
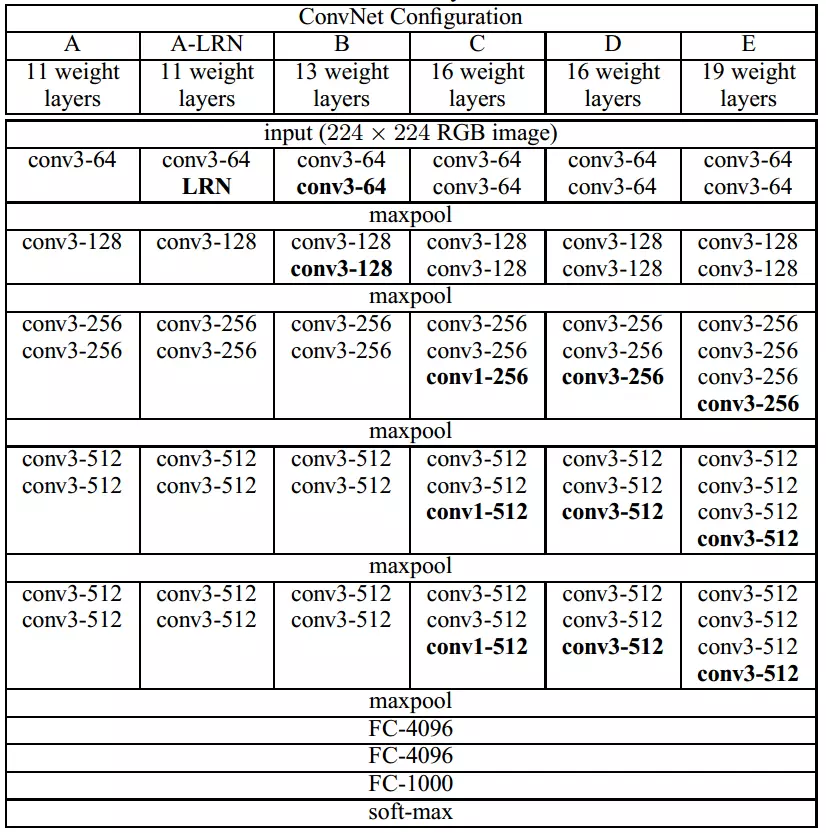
1)VGG
最常用的是VGG16,采用五组卷积与三个全连接层,最后使用Softmax分类。
使用的卷积核基本都是3*3,有些地方出现了多个3*3堆叠的现象,这种结构的优点在于,使用较少的参数实现了与5*5卷积核相同的感受野。
2)Inception
使用多个不同大小的卷积运算,并将不同卷积运算的结果级联起来,送入下一层。以Inception V1为例,一共有9个上述堆叠模块,共有22层。参数量是VGG的1/3,更适合处理大规模数据。

3)ResNet
引入深度残差框架解决网络深度导致的梯度消失问题,即让卷积网络去学习残差映射,而不是期望每一个堆叠层的网络都完整地拟合潜在的映射。

以ResNet50为例,最主要的部分在于中间经历了4个大的卷积组,而这4个卷积组分别包含了3、4、6这三个Bottleneck模块,最后经过一个全局平均池化使得特征图大小变为1*1,然后进行1000维的全连接,最后经过Softmax输出分类得分。

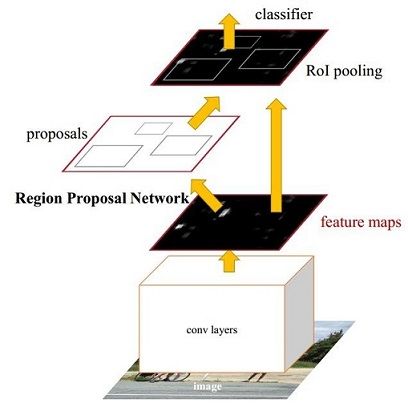
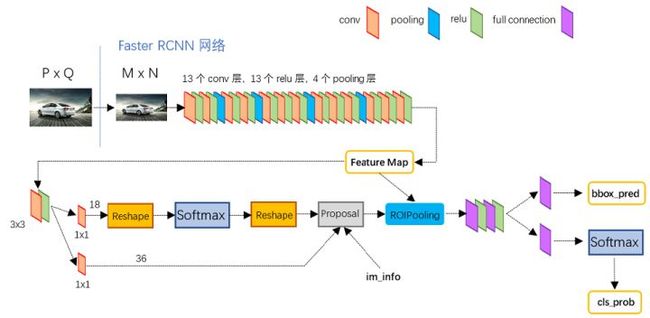
3、经典物体检测框架
1)两阶经典检测器Faster RCNN
参考这位大佬的文章:一文读懂Faster RCNN
未完待续
参考资料:PyTorch学习笔记(1)——requires_grad和autograd.no_grad
一文读懂Faster RCNN