Python基于CRNN&CTPN的文本检测系统(源码&教程)
1.背景
文本是人类最伟大和最具影响力的发明之一,是人类智慧的结晶,是人类文化、思想传承的一种基本的表达方式和不可或缺的载体。在21世纪,文本与日常生活密切相关。描述、理解万事万物,表达情感,与他人交流都离不开文本。文本以各种形式存在于生活中,尤其在信息时代,随着数码相机、智能手机等具有拍照和摄像功能的便携式电子设备的广泛使用,大量的文本也以图像或者视频的数据方式被保存下来。同时,移动互联网技术的飞速发展使得这类数据的传播和分享更加便捷。因此,人们迫切希望利用计算机对图像或视频中的文本进行检测识别,形成语义表达的方式对其进行理解。
2.识别效果


3.实时摄像头识别

4.视频演示
Python基于CRNN&CTPN的文本检测系统(源码&教程)_哔哩哔哩_bilibili
5.CTPN简介
CTPN是在ECCV 2016提出的一种文字检测算法。CTPN结合CNN与LSTM深度网络,能有效的检测出复杂场景的横向分布的文字,效果如下图,是目前比较好的文字检测算法。
CTPN算法的提出,出于以下几点:
(1)、假设文本是水平的;
(2)、文本可以看做由每一个“字母”组成的。这里的字母可以认为是小片段。之所以有这样的想法,是因为基于通用目标检测的算法难以适应文字检测的场景,如上图中的文字,长度方面变化幅度很大。
因此作者将文本在水平方向解耦,分成每一个小片,然后将文本行的检测转化为小片的检测,最后利用规则将属于同一水平行的小片组合成文本行。化繁为简。
CTPN的创新点主要由以下三点:
(1)、将文本行拆分为slice进行检测,这样在检测过程中只需要对文本的高度进行先验性的设置anchor。
(2)、作者认为文本具有时序性,即和阅读习惯一直,从左到右。因此作者加入RNN获取这种语义性。
(3)、后处理算法:文本连接算法。
6.改进后的CTPN的网络结构
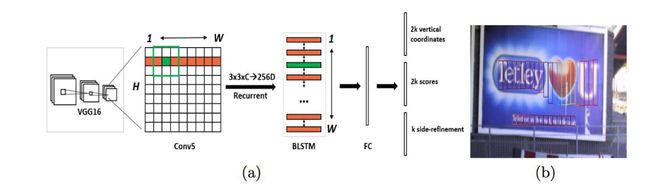
原始CTPN只检测横向排列的文字。参考该博客改进后的CTPN结构与Faster R-CNN基本类似,但是加入了LSTM层(CNN学习的是感受野内的空间信息,LSTM学习的是序列特征。对于文本序列检测,显然既需要CNN抽象空间特征,也需要序列特征,毕竟文字是连续的)。假设输入N Images:
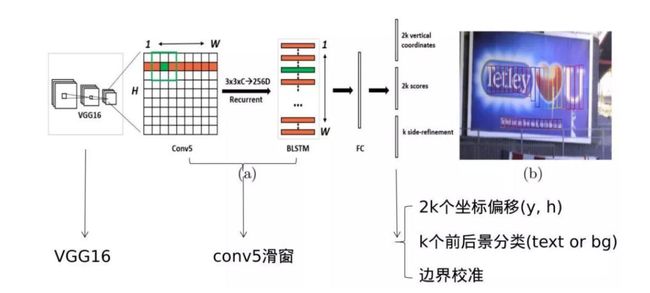
CTPN的整体结构与流程:
1.首先通过BackBone架构网络VGG16进行特征的提取,其Conv5层输出N x C x H x W的特征图,由于VGG16的卷积网络中经过4个池化层累计的Stride为16。也就是Conv5层输出的Feature map中一个像素对应原图的16像素。
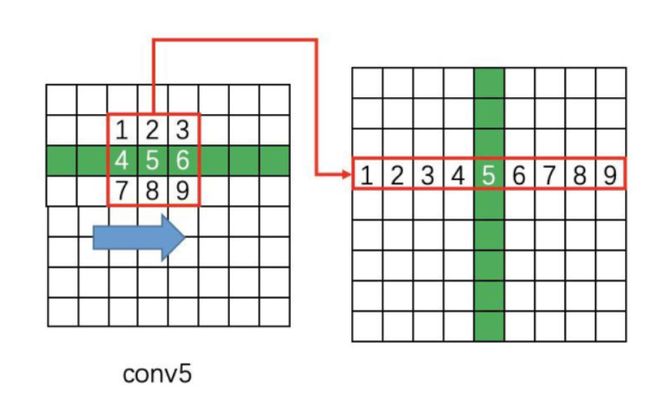
2.然后在Conv5上做3 x 3的滑动窗口,即每个点都结合周围3 x 3区域特征获取一个长度为3 x 3 x C的特征向量。如下图所示,输出为N x 9C x H x W的Feature map,该特征依然是由CNN学习到的空间特征。
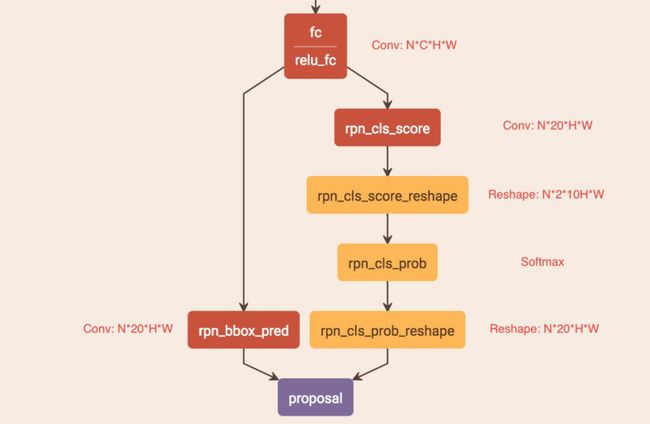
7.如何通过FC层输出产生Text proposals
CTPN通过CNN和BLSTM学到一组“空间 + 序列”特征后,在"FC"卷积层后接入RPN网络。这里的RPN与Faster R-CNN类似,分为两个分支:
左边分支用于Bounding Box Regression。由于FC Feature map每个点配备了10个Anchor,同时只回归中心y坐标与高度2个值,所以RPN_bboxp_red有20个Channels;
右边分支用于Softmax分类Anchor。
8.CTPN的训练

Anchor前后景分类误差:该Loss用于监督学习每个Anchor中是否包含文本。 s^{*}_{i}={0,1}表示是否是Groud truth。
竖直方向坐标偏移回归误差:该Loss用于监督学习每个包含为本的Anchor的Bouding box regression y方向offset,类似于Smooth L1 loss。其中vj是si中判定为有文本的Anchor,或者与Groud truth vertical IoU>0.5。
边界处Anchor x的矫正误差:该Loss用于监督学习每个包含文本的Anchor的Bouding box regression x方向offset,与y方向同理。
前两个Loss存在的必要性很明确,但这个Loss有何作用作者没有解释(从训练和测试的实际效果看,作用不大)说明一下,在Bounding box regression的训练过程中,其实只需要注意被判定成正的Anchor,不需要去关心杂乱的负Anchor。这与Faster R-CNN类似。
代码实现
"""
This file is to change MSRA_TD500 dataset format to ICDAR2015 dataset format.
MSRA_TD500 format: [index difficulty_label x y w h angle]
ICDAR2015 format: [left_top_x left_top_y right_top_X right_top_y right_bottom_x right_bottom_y left_bottom_x left_bottom_y]
"""
import math
import cv2
import os
# 求旋转后矩形的4个坐标
def get_box_img(x, y, w, h, angle):
# 矩形框中点(x0,y0)
x0 = x + w/2
y0 = y + h/2
l = math.sqrt(pow(w/2, 2) + pow(h/2, 2)) # 即对角线的一半
# angle小于0,逆时针转
if angle < 0:
a1 = -angle + math.atan(h / float(w)) # 旋转角度-对角线与底线所成的角度
a2 = -angle - math.atan(h / float(w)) # 旋转角度+对角线与底线所成的角度
pt1 = (x0 - l * math.cos(a2), y0 + l * math.sin(a2))
pt2 = (x0 + l * math.cos(a1), y0 - l * math.sin(a1))
pt3 = (x0 + l * math.cos(a2), y0 - l * math.sin(a2)) # x0+左下点旋转后在水平线上的投影, y0-左下点在垂直线上的投影,显然逆时针转时,左下点上一和左移了。
pt4 = (x0 - l * math.cos(a1), y0 + l * math.sin(a1))
else:
a1 = angle + math.atan(h / float(w))
a2 = angle - math.atan(h / float(w))
pt1 = (x0 - l * math.cos(a1), y0 - l * math.sin(a1))
pt2 = (x0 + l * math.cos(a2), y0 + l * math.sin(a2))
pt3 = (x0 + l * math.cos(a1), y0 + l * math.sin(a1))
pt4 = (x0 - l * math.cos(a2), y0 - l * math.sin(a2))
return [pt1[0], pt1[1], pt2[0], pt2[1], pt3[0], pt3[1], pt4[0], pt4[1]]
def read_file(path):
result = []
for line in open(path):
info = []
data = line.split(' ')
info.append(int(data[2]))
info.append(int(data[3]))
info.append(int(data[4]))
info.append(int(data[5]))
info.append(float(data[6]))
info.append(data[0])
result.append(info)
return result
if __name__ == '__main__':
file_path = '/home/ljs/OCR_dataset/MSRA-TD500/test/'
save_img_path = '../dataset/OCR_dataset/ctpn/test_im/'
save_gt_path = '../dataset/OCR_dataset/ctpn/test_gt/'
file_list = os.listdir(file_path)
for f in file_list:
if '.gt' in f:
continue
name = f[0:8]
txt_path = file_path + name + '.gt'
im_path = file_path + f
im = cv2.imread(im_path)
coordinate = read_file(txt_path)
# 仿照ICDAR格式,图片名字写做img_xx.jpg,对应的标签文件写做gt_img_xx.txt
cv2.imwrite(save_img_path + name.lower() + '.jpg', im)
save_gt = open(save_gt_path + 'gt_' + name.lower() + '.txt', 'w')
for i in coordinate:
box = get_box_img(i[0], i[1], i[2], i[3], i[4])
box = [int(box[i]) for i in range(len(box))]
box = [str(box[i]) for i in range(len(box))]
save_gt.write(','.join(box))
save_gt.write('\n')
9.CRNN简介
现今基于深度学习的端到端OCR技术有两大主流技术:CRNN OCR和attention OCR。其实这两大方法主要区别在于最后的输出层(翻译层),即怎么将网络学习到的序列特征信息转化为最终的识别结果。这两大主流技术在其特征学习阶段都采用了CNN+RNN的网络结构,CRNN OCR在对齐时采取的方式是CTC算法,而attention OCR采取的方式则是attention机制。本部分主要介绍应用更为广泛的CRNN算法。
10.CRNN网络结构
CRNN全称为Convolutional Recurrent Neural Network,主要用于端到端地对不定长的文本序列进行识别,不用先对单个文字进行切割,而是将文本识别转化为时序依赖的序列学习问题,就是基于图像的序列识别。
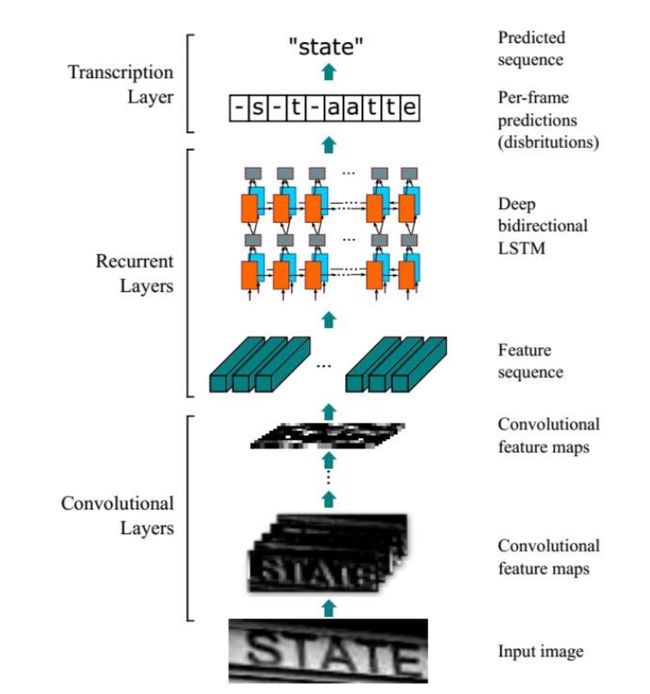
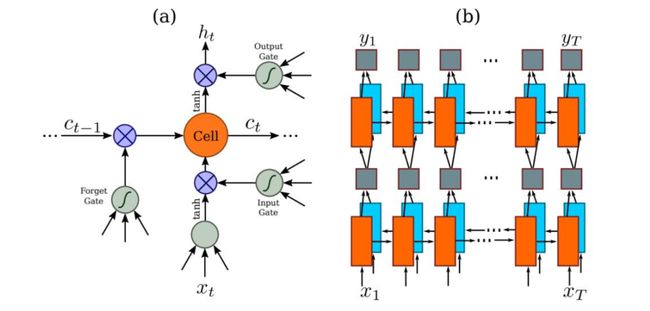
因为RNN有梯度消失的问题,不能获取更多上下文信息,所以采用该博客提出的改进后的LSTM,LSTM的特殊设计允许它捕获长距离依赖。
LSTM是单向的,它只使用过去的信息。然而,在基于图像的序列中,两个方向的上下文是相互有用且互补的。将两个LSTM,一个向前和一个向后组合到一个双向LSTM中。此外,可以堆叠多层双向LSTM,深层结构允许比浅层抽象更高层次的抽象。
这里采用的是两层各256单元的双向LSTM网络:
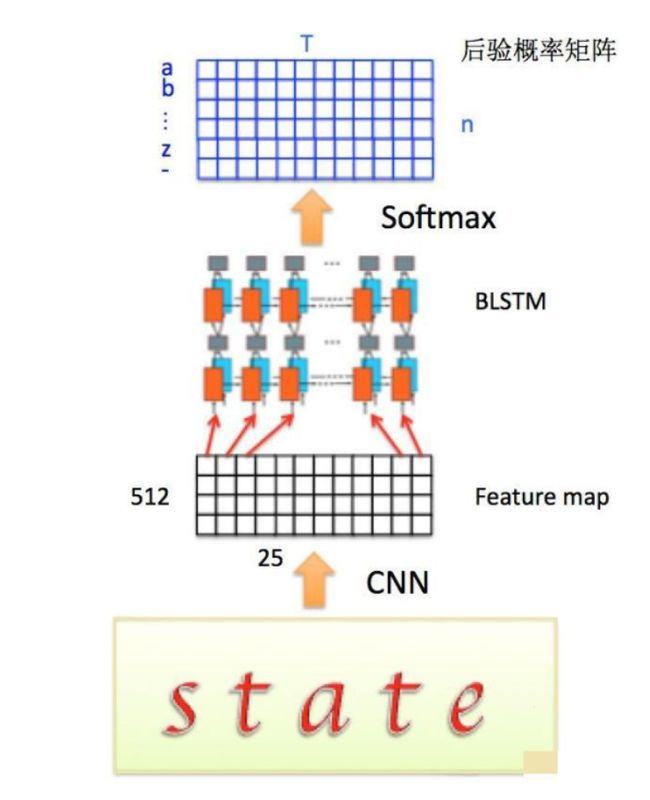
通过上面一步,我们得到了40个特征向量,每个特征向量长度为512,在LSTM中一个时间步就传入一个特征向量进行分类,这里一共有40个时间步。
我们知道一个特征向量就相当于原图中的一个小矩形区域,RNN的目标就是预测这个矩形区域为哪个字符,即根据输入的特征向量,进行预测,得到所有字符的softmax概率分布,这是一个长度为字符类别数的向量,作为CTC层的输入。
因为每个时间步都会有一个输入特征向量xT,输出一个所有字符的概率分布yT,所以输出为40个长度为字符类别数的向量构成的后验概率矩阵。如下图所示:
11.系统整合
下图源码&环境部署视频教程&自定义UI界面
参考博客《Python基于CRNN&CTPN的自然场景文本检测系统(源码&教程)》
12.参考文献
[1]Zhu, Yixing,Du, Jun.TextMountain: Accurate scene text detection via instance segmentation[J].Pattern Recognition: The Journal of the Pattern Recognition Society.2021.110DOI:10.1016/j.patcog.2020.107336.
[2]Luo, Canjie,Lin, Qingxiang,Liu, Yuliang,等.Separating Content from Style Using Adversarial Learning for Recognizing Text in the Wild[J].International Journal of Computer Vision.2021,129(4).960-976.DOI:10.1007/s11263-020-01411-1.
[3].Adaptive embedding gate for attention-based scene text recognition[J].Neurocomputing.2020,381(Mar.14).261-271.DOI:10.1016/j.neucom.2019.11.049.
[4].EPAN: Effective parts attention network for scene text recognition[J].Neurocomputing.2020,376(Feb.1).202-213.DOI:10.1016/j.neucom.2019.10.010.
[5]Liu, Yuliang,Jin, Lianwen,Zhang, Shuaitao,等.Curved scene text detection via transverse and longitudinal sequence connection[J].Pattern Recognition: The Journal of the Pattern Recognition Society.2019.90337-345.DOI:10.1016/j.patcog.2019.02.002.
[6]Gao, Yunze,Chen, Yingying,Wang, Jinqiao,等.Reading scene text with fully convolutional sequence modeling[J].Neurocomputing.2019,339(Apr.28).161-170.DOI:10.1016/j.neucom.2019.01.094.
[7]Xinjie Feng,Hongxun Yao,Shengping Zhang.Focal CTC Loss for Chinese Optical Character Recognition on Unbalanced Datasets[J].Complexity.2019,(1).9345861-1-9345861-11.DOI:10.1155/2019/9345861.
[8]Jun Tang,Zhibo Yang,Yongpan Wang,等.SegLink++: Detecting Dense and Arbitrary-shaped Scene Text by Instance-aware Component Grouping[J].Pattern Recognition.2019.96106954.DOI:10.1016/j.patcog.2019.06.020.
[9]Zhong, Zhuoyao,Sun, Lei,Huo, Qiang.An anchor-free region proposal network for Faster R-CNN-based text detection approaches[J].International journal on document analysis and recognition.2019,22(3).315-327.DOI:10.1007/s10032-019-00335-y.
[10]Luo, Canjie,Jin, Lianwen,Sun, Zenghui.MORAN: A Multi-Object Rectified Attention Network for scene text recognition[J].Pattern Recognition: The Journal of the Pattern Recognition Society.2019.90109-118.DOI:10.1016/j.patcog.2019.01.020.