VDSR论文学习笔记
VDSR网络是韩国首尔国立大学Jiwon Kim等人在SRCNN基础上又一次新的突破,在单图像超分辨率重建(SR)方面展示出了更好的性能。
针对SRCNN存在的三个局限性:
①依赖于小图像区域的Context;
②收敛速度较慢;
③网络只适用于单一规模。
VDSR的主要改进:
①使用非常大的感受野(41×41)和非常深的网络(20层),以适应非常大的图像区域上的上下文信息;
②残差学习和梯度裁剪,学习LR到HR图像的残差以加快收敛速度,同时使用较高的学习率(SRCNN的![]() 倍);
倍);
③提出单模型SR方法以减少参数,在单个模型中实现任意比例因子,且可以为分数,实现多尺度SR;
④与SRCNN不同之处还有:VDSR网络输入输出图像大小相同,SRCNN输出图片尺寸小于输入;VDSR网络的所有层使用相同的学习速率,而SRCNN对不同层使用不同的学习速率以实现稳定的收敛。
VDSR网络结构:

该网络共D个卷积层,卷积核大小均为64×3×3,其中第一层对输入图像进行操作,最后一层用于图像重建,使用单个滤波器,其余层均使用64个滤波器。网络将插值的低分辨率图像(达到所目标尺寸)作为输入,并预测图像细节,y(HR)=x(Residual)+r(LR),网络的每层均使用padding以保证输入输出图像尺寸一致。
损失函数:![]() (其中r=HR-LR,f(x)表示网络的预测值)
(其中r=HR-LR,f(x)表示网络的预测值)
在训练中,为了最大收敛速度,该网络将梯度剪裁为![]() ,其中
,其中 表示当前学习率,
表示当前学习率, 表示预定义的范围。为了训练了多尺度模型,将几个特定尺度的训练数据集组合成一个大数据集。数据准备与SRCNN相似,但在此输入patches大小等于感受野的大小,图像被分割成没有重叠的子图像。一个mini-batch由64个子图像组成,其中不同比例的子图像可以在同一个batch中。
表示预定义的范围。为了训练了多尺度模型,将几个特定尺度的训练数据集组合成一个大数据集。数据准备与SRCNN相似,但在此输入patches大小等于感受野的大小,图像被分割成没有重叠的子图像。一个mini-batch由64个子图像组成,其中不同比例的子图像可以在同一个batch中。
训练数据集:91-images(Banchmark使用291-images)
测试数据集:Set5、Set14、Urban100、B100
数据处理:与SRCNN类似,将原始图像划分为![]() ×
×![]() (1000张1×41×41)的子图像块,但彼此间没有重叠部分,每个batch包括64张子图像,同时将不同比例因子的图像合成一个大数据集用于多尺度训练。
(1000张1×41×41)的子图像块,但彼此间没有重叠部分,每个batch包括64张子图像,同时将不同比例因子的图像合成一个大数据集用于多尺度训练。
网络结构的pytorch实现:
class Conv_ReLU_Block(nn.Module):
def __init__(self):
super(Conv_ReLU_Block, self).__init__()
self.conv = nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1, padding=1, bias=False)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
return self.relu(self.conv(x))
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.residual_layer = self.make_layer(Conv_ReLU_Block, 18)
self.input = nn.Conv2d(in_channels=1, out_channels=64, kernel_size=3, stride=1, padding=1, bias=False)
self.output = nn.Conv2d(in_channels=64, out_channels=1, kernel_size=3, stride=1, padding=1, bias=False)
self.relu = nn.ReLU(inplace=True)
# 权值参数初始化
print(self.modules())
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, sqrt(2. / n)) # m.weight.data是卷积核参数, m.bias.data是偏置项参数
def make_layer(self, block, num_of_layer):
layers = []
for _ in range(num_of_layer):
layers.append(block())
print(nn.Sequential(*layers))
return nn.Sequential(*layers)
def forward(self, x):
residual = x
out = self.relu(self.input(x))
out = self.residual_layer(out)
out = self.output(out)
out = torch.add(out,residual)
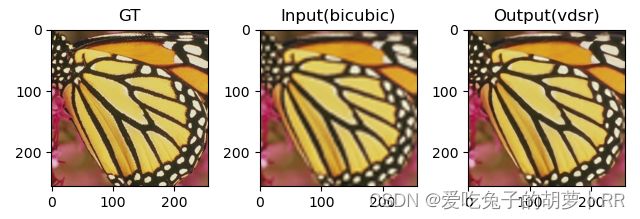
return out重建效果:
PS:
感受野大小 :
对于N个卷积核为n的滤波器组成的网络,第一层感受野为n×n,第D层的感受野为((N-1)D+1)×((N-1)D+1),感受野的大小与网络深度成正比。此时一个大的滤波器就可以有效地分解为一系列小的滤波器,从而加深了网络。在SR任务中,较大的感受野意味着网络可以使用更多的上下文来预测图像细节。
梯度裁剪:
如果梯度值小于负阈值或大于正阈值,则梯度值裁剪将损失函数的导数剪切为给定值。例如,可以将范数指定为0.5,这意味着如果梯度值小于-0.5,则将其设置为-0.5,如果梯度值大于0.5,则将其设置为0.5。
pytorch中梯度剪裁方法:torch.nn.utils.clip_grad_norm_(parameters, max_norm, norm_type=2)
parameters:希望实施梯度裁剪的可迭代网络参数
max_norm:该组网络参数梯度的范数上限
norm_type:范数类型,默认为L2
He初始化:
He初始化是何凯明等提出的一种鲁棒的神经网络参数初始化方法,为了保证信息在前向传播和反向传播过程中能够有效流动,使不同层的输入信号的方差大致相等。其对应的是非线性激活函数(Relu 和 Prelu)。
结论:各层权重初始化为期望为0,标准差为 的高斯分布,并且将b初始化为0。用公式表示为:
的高斯分布,并且将b初始化为0。用公式表示为:
![]()
其中![]() 表示第L层的神经元个数。
表示第L层的神经元个数。
Pytorch代码实现:
# 权值参数初始化
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, sqrt(2. / n)) # m.weight.data是卷积核参数, m.bias.data是偏置项参数