KCF论文理解与源码解析
文章目录
- 源码及参考
- 数据集
- MATLAB 代码测试
- MATLAB 代码分析
- KCF核心公式
- KCF公式推导
- C++ 代码测试
- OpenCV 代码测试
KCF(Kernelized Correlation Filter)基于核化的 岭回归分类器 使用循环移位得到的 循环矩阵 来采集正负样本,利用循环矩阵在 傅里叶空间 可对角化的性质,将矩阵的运算转化为元素的点乘,从而降低了运算量,使得算法满足实时性要求。同时, KCF使用 多通道HOG特征 代替单通道灰度特征,将特征扩展到多通道的非线性特征空间,达到了更高的鲁棒性和准确性。
源码及参考
- 作者源码:http://www.robots.ox.ac.uk/~joao/circulant/index.html
- GitHub源码:https://github.com/foolwood/KCF
- 2019-02-04 KCF剖析
- 2019-01-03 KCF跟踪算法原理 入门详解
- 2018-10-23 KCF论文详解与复现
- 2016-12-08 KCF入门详解
- 2016-09-30 KCF目标跟踪方法分析与总结
- 2016-03-24 KCF高速跟踪详解与公式推导
- 2017-05-07 KCF公式推导错误及验证
- 数据集 OTB评估指标
- 其他 KCF代码在OTB2015数据集上的坑
数据集
论文中提及所用的数据集是 OTB2013 Y. Wu, J. Lim, and M. H. Yang, “Online object tracking: A benchmark,” in CVPR, 2013 共包含50个视频序列。官方下载:Visual Tracker Benchmark
视频列表:
videos = {'basketball', 'bolt', 'boy', 'car4', 'carDark', 'carScale', ...
'coke', 'couple', 'crossing', 'david2', 'david3', 'david', 'deer', ...
'dog1', 'doll', 'dudek', 'faceocc1', 'faceocc2', 'fish', 'fleetface', ...
'football', 'football1', 'freeman1', 'freeman3', 'freeman4', 'girl', ...
'ironman', 'jogging', 'jumping', 'lemming', 'liquor', 'matrix', ...
'mhyang', 'motorRolling', 'mountainBike', 'shaking', 'singer1', ...
'singer2', 'skating1', 'skiing', 'soccer', 'subway', 'suv', 'sylvester', ...
'tiger1', 'tiger2', 'trellis', 'walking', 'walking2', 'woman'};
MATLAB 代码测试
Quickstart:
- Extract code somewhere.
- The tracker is prepared to run on any of the 50 videos of the Visual Tracking Benchmark [3]. For that, it must know where they are/will be located. You can change the default location ‘base_path’ in ‘download_videos.m’ and
run_tracker.m.- If you don’t have the videos already, run
download_videos.m(may take some time).- Execute ‘run_tracker’ without parameters to choose a video and test the KCF on it.
注意:
- 在国内用脚本下载数据集容易失败,建议前往官网手动下载;
- 代码不兼容部分需要按提示更改,如show_video.m中第24行的
Number应改为NumberTitle等,MATLAB2018环境可直接下载调整好的代码:MATLAB 2018 KCF源码
测试环境:

测试结果:
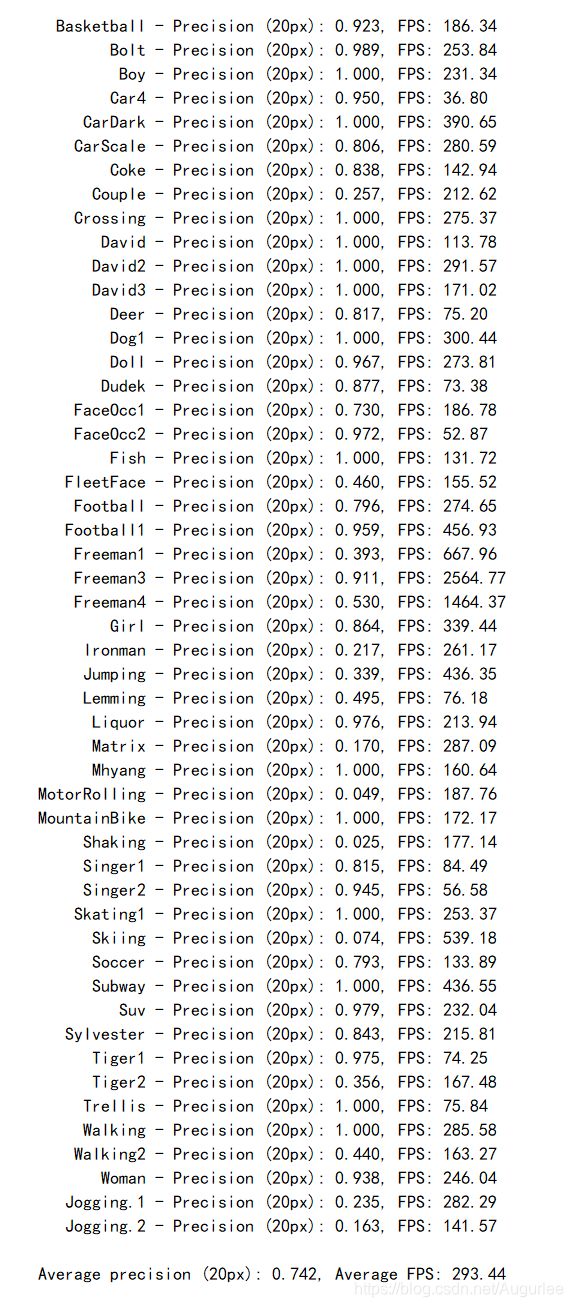
>> run_tracker all gaussian hog %Kernelized Correlation Filter (KCF)
从最后结果来看,KCF(0.742,293)要优于论文结果(0.732,172), DCF(0.730, 604)也优于论文结果(0.728, 292). 代码相同的前提下,可能是硬件不同以及MATLAB版本升级带来了巨大的性能提升。
MATLAB 代码分析
只对
KCF-HOG部分的代码进行分析
性能评估接口:
run_tracker.m

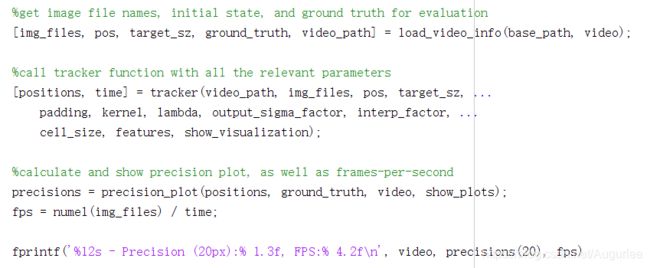
这是并行测试50个视频序列,最后对结果取平均。从下面的跟踪接口代码来看,img_files中存放图片名称,在tracker函数中进行读取并跟踪。从tic() toc()包括的代码来看,只测量跟踪算法消耗的时间,imread()时间不计入。
跟踪接口代码:
run_tracker.m
跟踪参数:
padding = 1.5; // extra area surrounding the target
feature_type = 'hog'; // feature type
kernel.type = 'gaussian'; // kernel
kernel.sigma = 0.5; // gaussian kernel bandwidth
lambda = 1e-4; // regularization
output_sigma_factor = 0.1; // spatial bandwidth (proportional to target)
interp_factor = 0.02; // linear interpolation factor for adaptation of model parameters
cell_size = 4; // HOG cell size
features.hog = true; // enable HOG feature
features.hog_orientations = 9; // the number of HOG bins
跟踪代码:
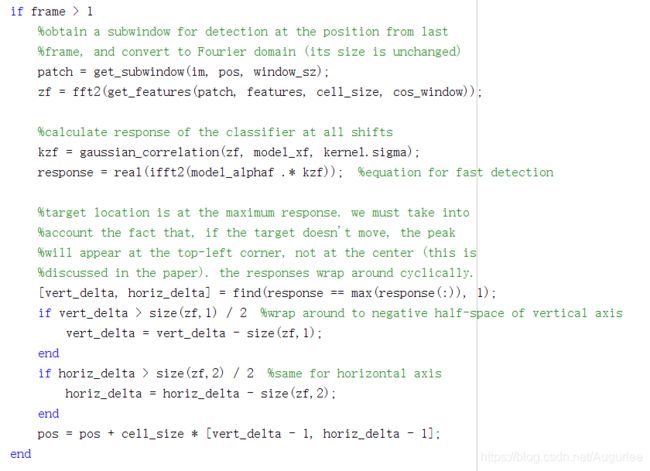
与论文中的伪代码相差不大:
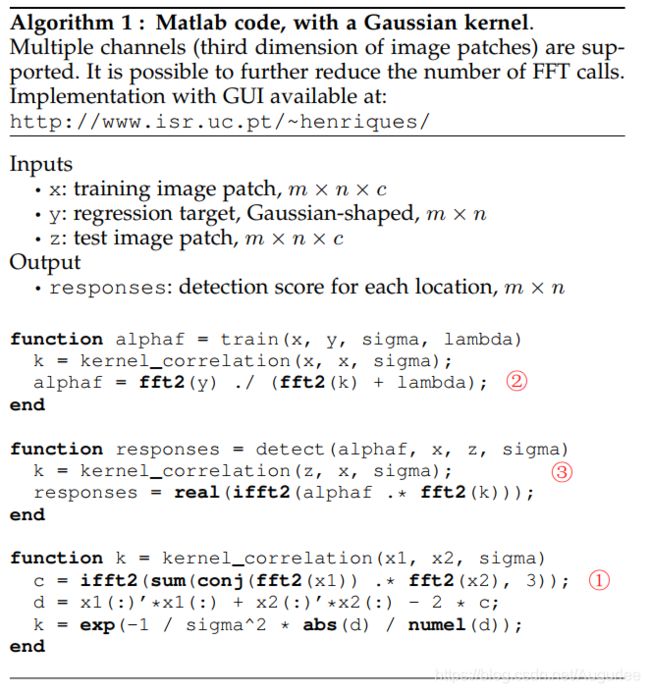
这是由以下的核心公式得出的。
KCF核心公式
-
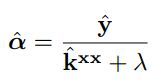
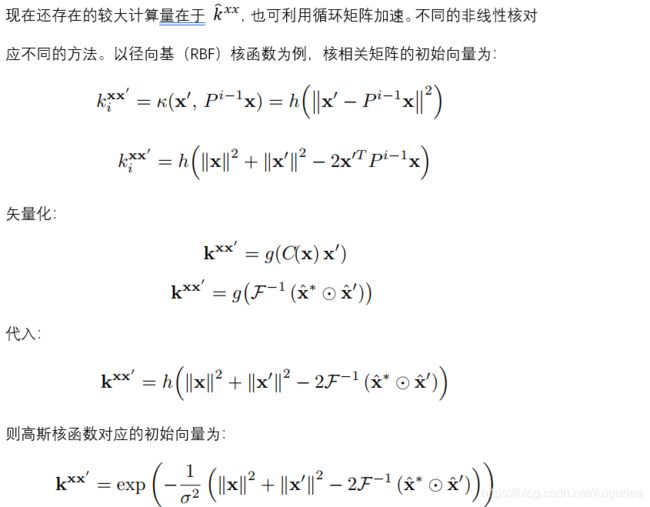
核相关矩阵的初始向量:

-
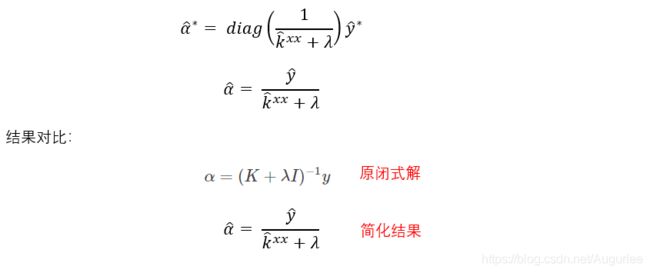
核化后的岭回归分类器权值:
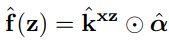
-
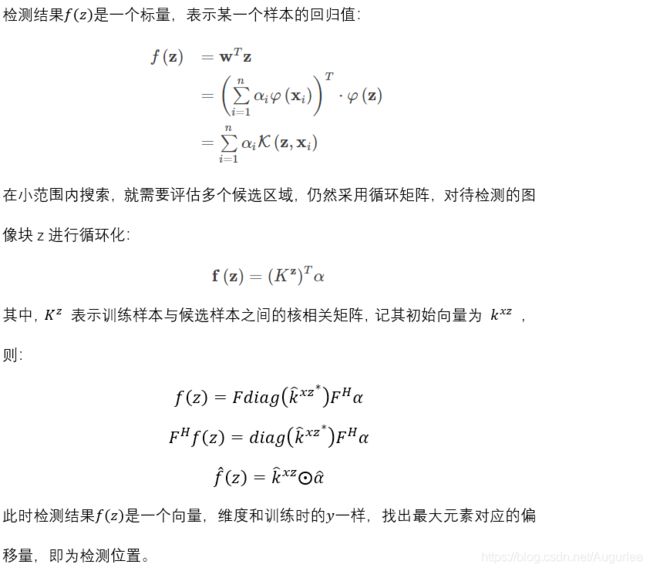
快速检测:
KCF公式推导
Step 1:KCF的基本模型是岭回归分类器
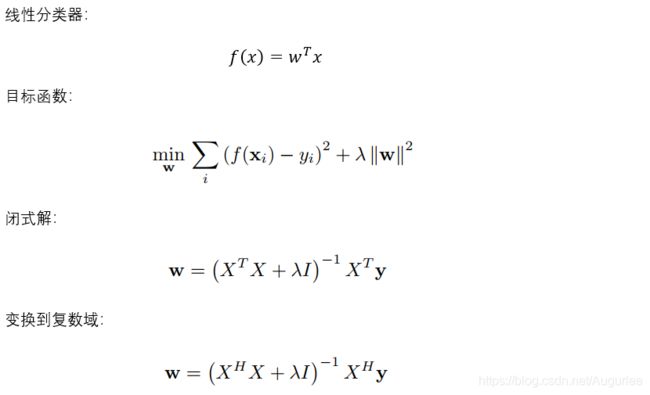
Step 2:为了 简化闭式解的计算,消除矩阵乘法与求逆运算,以及为了 增广样本,需要引入循环矩阵。
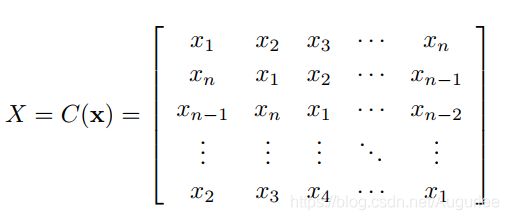
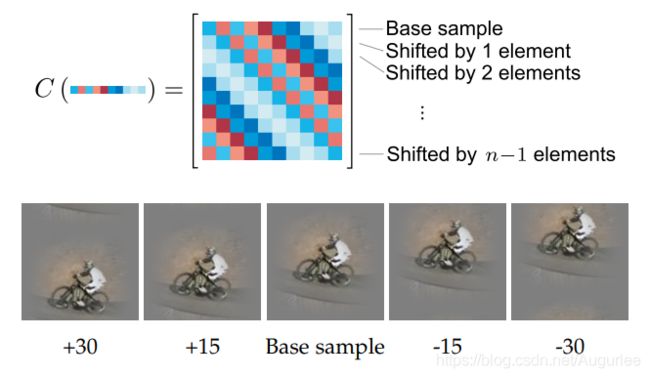
循环矩阵有着良好性质:

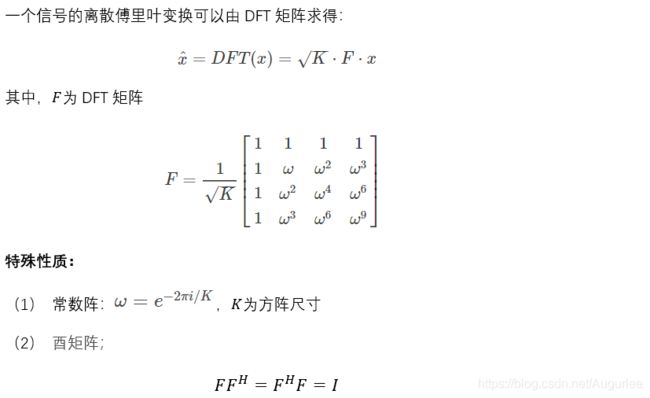
离散傅里叶变换简介:
Step 3:简化计算
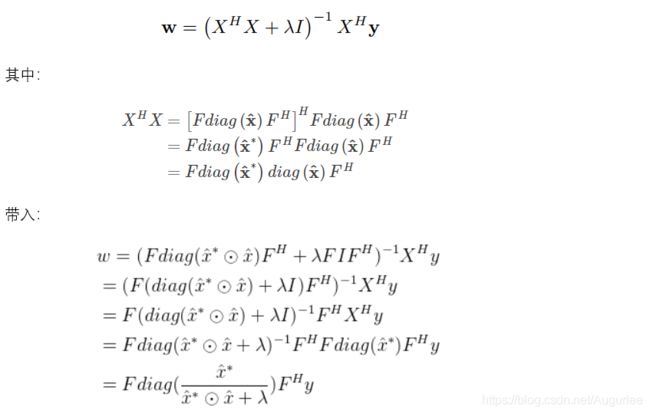
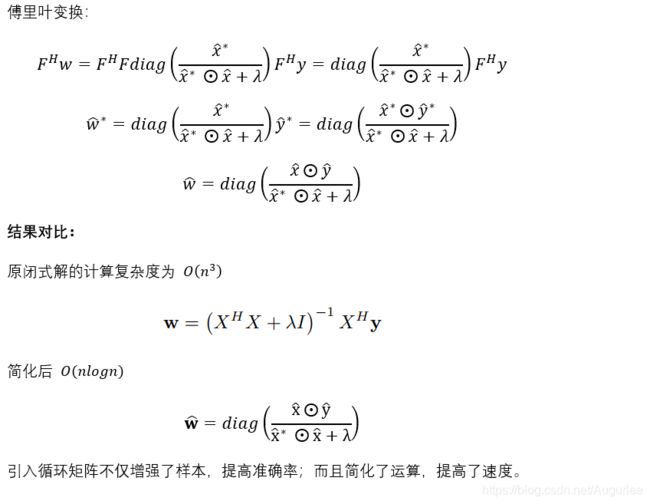
注:最后结果的 d i a g diag diag运算可以省略。
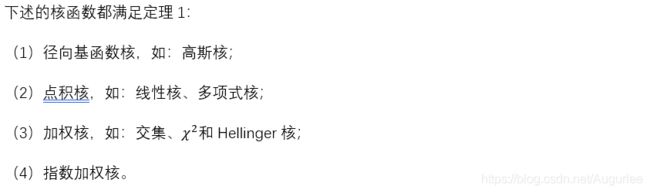
Step 4:为了提高分类器的准确度,解决“线性不可分”问题,对岭回归分类器进行 “核化”。

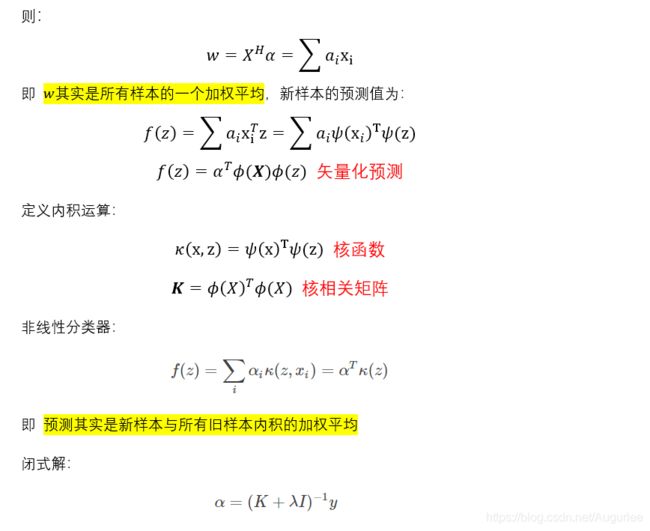
核空间的岭回归:
- 第2.5节核空间的脊回归;
- 核岭回归(Kernel Ridge Regression)
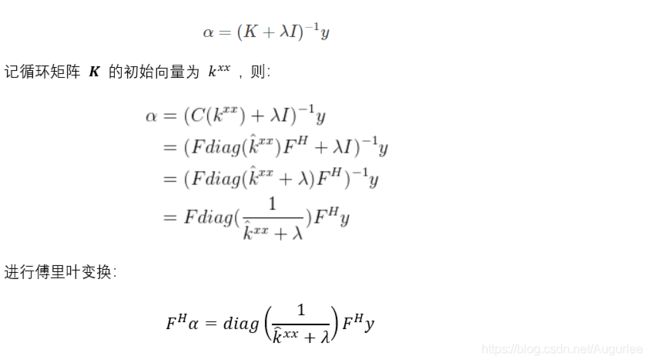
Step 5:核化分类器的简化计算

对闭式解进行同等化简(对角化、傅里叶变换):
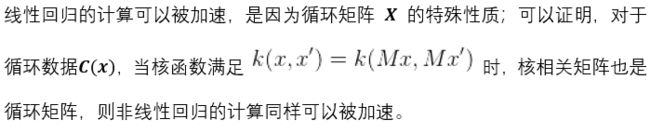
Step 6:核相关矩阵的加速计算
Step 7:快速检测
Step 8:选用多通道HOG特征提升准确率。对于多通道的特征描述符,只需在傅立叶域中对对每个通道的各个点积求和即可。

HOG特征与FHOG特征:
- 图像特征:方向梯度直方图 HOG
- HOG与FHOG特征提取
C++ 代码测试
需要修改数据集,这里只对Coke序列进行了测试。OpenCV版本 4.x,修改后的可运行代码和数据集已经上传: Streamlined KCF.zip
video info:
- img size (640, 480)
- roi size (48, 80)
- win size (120, 200) = roi * 2.5
- frame count 291
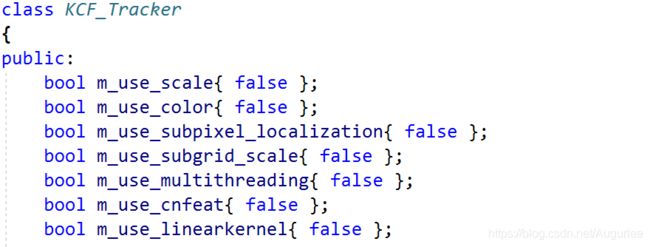
相比MATLAB的测试结果(143 fps),慢了太多。根据作者GitHub所描述的,这并不是单一尺度的跟踪,使用的特征是FHOG+CN,因此测试基本性能需要将这些参数清零:
再次测试,速度明显提升:

此时,C++ 版本的算法实现参数为:单一尺度、仅使用灰度图像的FHOG特征、使用Gaussian核,达到平均帧率 110 fps;跟踪效果方面仅可以抵抗小部分遮挡,完全遮挡则会出现目标丢失。
OpenCV 代码测试
版本 4.1.2
#include 同样的数据集,比着上一节的Streamlined KCF要快的多,并且高于MATLAB(143 fps) 的测试结果。此时采用的是 cv::TrackerKCF 默认参数,选择的是压缩后的ColorName特征,并不是论文中设计的FHOG特征。从跟踪效果上看,无法应对小部分遮挡,在 OTB2013/Coke 数据集中 第10帧往后即丢失目标。

关于帧率统计需要说明的是:
- 评价tracker的性能,应该只统计跟踪时间,图像读取时间是被排除的,在作者的MATLAB源码中也是这么计时的(上文中有提及)。
- 如果在
for/while循环外进行计时,则连带统计了imread的耗时,结果有所不同:总耗时 2.498 s,由此可见,KCF的跟踪性能与OpenCV的图像读取差不多,的确性能出众。