SpaceClaim脚本建模初试(一)
SpaceClaim2019也提供了脚本建模的选项,通过合理规划可以非常方便的创建系列零件,方便快速建模,节省时间,就此方面做个学习记录,并分享出来,与大家交流共同进步,本人python是自学的,可能某些代码规范并不太清楚,请勿吐槽。
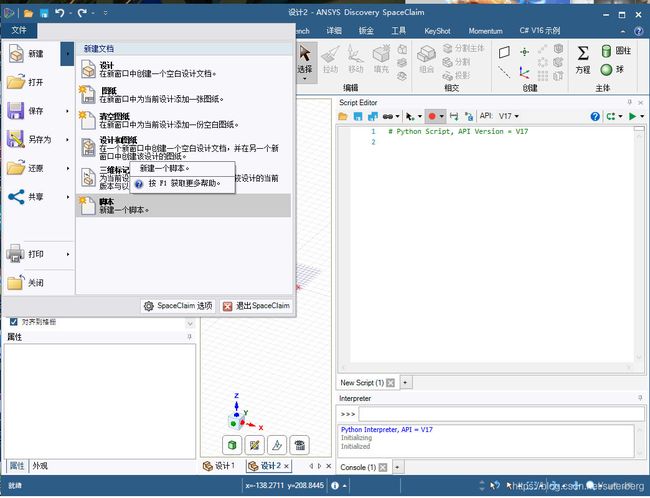
这次是基于Ansys 19 R1自带的SpaceClaim版本,通过如图方式新建脚本,API版本为V17,具体建模方式就不做介绍了,大家可以自行学习非常简单。
具体API方式可以查询帮助文档,里边非常详细的解释。
现在正式开始学习,首先先建立一个poi类,方便点的计算具体代码如下
class poi():
def __init__(self, x, y):
self.x = x
self.y = y
def addx(self, inx):#x坐标增加
self.x = self.x + inx
return self
def addy(self, inx):#y坐标增加
self.y = self.y + inx
return self
def adds(self, inx):#x,y坐标增加
self.x = self.x + inx.x
self.y = self.y + inx.y
return self
def rettup(self):
return (self.x,self.y)
def __add__(self, other):# +号定义
x = self.x + other.x
y = self.y + other.y
return poi(x, y)
def __str__(self):
return 'x:%7d ,y:%7d' % (self.x, self.y)
接着创建关于草绘平面相关函数,为了以后封装方便,将原函数拆分为几个函数
def sketch(p,x,y):#创建草绘指令
Pl=plane(p,x,y)
ViewHelper.SetSketchPlane(Pl)
def plane(p,x,y):#创建平面
pl=Plane.Create(frame(p,x,y))
return pl
def frame(p,x,y):#创建坐标框架
fs=Frame.Create(poitcs(p),direct(x),direct(y))
return fs
def poitcs(po):#将点转换为需要的点参数
return Point.Create(MM(po.x), MM(po.y), MM(po.z))
def direct(po):#创建方向数据
return Direction.Create(po[0],po[1],po[2])
p=poi3(0,0,0)
sketch(p,(1,0,0),(0,1,0))#在(0,0,0)点,以x轴为X方向,y轴为Y方向创建草绘,可以根据需要调整方向。
忘了创建三维点类了
class poi3():
def __init__(self, x, y,z):
self.x = x
self.y = y
self.z = z
def addx(self, inx):
self.x = self.x + inx
return self
def addy(self, inx):
self.y = self.y + inx
return self
def addz(self, inx):
self.z = self.z + inx
return self
def adds(self, inx):
self.x = self.x + inx.x
self.y = self.y + inx.y
self.z = self.z + inx.z
return self
def addtup(self, inx):
self.x = self.x + inx[0]
self.y = self.y + inx[1]
self.z = self.z + inx[2]
return self
def __add__(self, other):
x = self.x + other.x
y = self.y + other.y
z=self.z+ other.z
return poi3(x, y,z)
def rettup(self):
return (self.x,self.y,self.z)
def __str__(self):
return 'x:%7d ,y:%7d' % (self.x, self.y)
接着点击执行就可以看到具体效果了,记得先切回三维模式再尝试。暂时就到这了,其他有时间再发。