Ubuntu 16.04下Autoware安装配置(含ROS、opencv、qt的详细安装教程)
Ubuntu 16.04下Autoware安装配置详细教程
-
- 1、ros的安装
- 2、安装opencv
- 3、QT-5的安装
- 4、安装autoware
1、ros的安装
官方安装说明:http://wiki.ros.org/Installation/Ubuntu?distro=kinetic
1.1 添加ROS官方的软件源镜像:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
1.2 添加密钥
如果添加完密钥后,在第三步报错则将–recv-key后的密钥改为报错信息显示的密钥即可。
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key F42ED6FBAB17C654
1.3 确保之前的软件源修改得以更新
sudo apt-get update
1.4 若不执行该命令,第8步会出错
sudo apt-get install dpkg
1.5 安装ROS,桌面完整本安装(Desktop-Full),这个过程也许会很久
sudo apt-get install ros-kinetic-desktop-full
1.6 初始化rosdep,初始化和更新依赖
sudo rosdep init
rosdep update
1.7 设置环境变量
ROS已经成功安装到计算机中,默认在/opt路径下。在bash中设置ROS环境变量。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
1.8、安装rosinstall
rosinstall是一个可以下载和安装ROS中的功能包程序
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
1.9 管理环境
确保你已经设置了像ROS_ROOT和ROS_PACKAGE_PATH这样的环境变量,可以通过以下命令查看:
export | grep ROS
source /opt/ros/kinetic/setup.bash
1.10 测试ROS安装成功
用roscore命令启动ROS Master
roscore

2、安装opencv
2.1 安装cmake以及依赖库
sudo apt-get install cmake
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff4.dev libswscale-dev libjasper-dev
2.2 安装opencv
OpenCV官网: https://opencv.org.以OpenCV-2.4.9为例子。
unzip OpenCV-2.4.9.zip
cd opencv-2.4.9
mkdir build
cd build
cmake ..
sudo make -j4
sudo make install
2.3 把opencv的so库加入到环境变量
输入如下命令,在弹出文件的末尾加入/usr/local/lib,保存退出。
sudo gedit /etc/ld.so.conf.d/opencv.conf #在弹出文件的末尾加入/usr/local/lib
sudo ldconfig #使配置生效
输入如下命令,在弹出文件的末尾加入PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig export PKG_CONFIG_PATH,保存退出。
sudo gedit /etc/bash.bashrc #打开/etc/bash.bashrc
更新database
sudo updatedb
2.4 测试使用
打开opencv2.4.9目录下的opencv-2.4.9/samples/c,运行build_all.sh脚本
./build_all.sh
./pyramid_segmentation
3、QT-5的安装
官网下载地址: http://download.qt.io/archive/qt/
下载好后cd到文件目录,输入以下命令,安装弹出的软件安装界面提示一步步完成安装即可。
chmod +x qt-opensource-linux-x64-5.8.0.run
./qt-opensource-linux-x64-5.8.0.run
完成后还要修改一些配置。在命令行中输入如下命令,打开default.conf文件,将第一行改为bin目录的路径,第二行改为qt5.8.0目录的路径,保存退出。
sudo gedit /usr/lib/x86_64-linux-gnu/qt-default/qtchooser/default.conf

安装libgl1-mesa-dev
sudo apt-get install libgl1-mesa-dev
4、安装autoware
4.1 Ubuntu16.04系统所需安装的依赖项
sudo apt-get update
sudo apt-get install -y python-catkin-pkg python-rosdep python-wstool ros-$ROS_DISTRO-catkin libmosquitto-dev gksu
4.2 autoware
gitlab上新版本的autoware没有了用于激光雷达和相机的联合标定工具,所以我找的旧版本的1.8.0版本的autoware。autoware-1.8.0我已经上传csdn存档,便于查找。新版本安装方法可以参见gitlab相关页面。
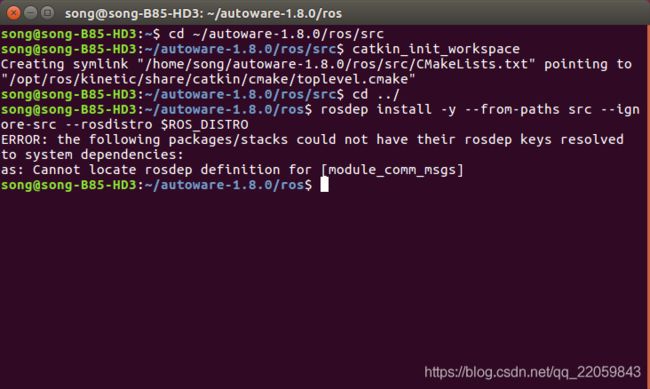
cd ~/autoware-1.8.0/ros/src
catkin_init_workspace
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
./catkin_make_release
如果在rosdep install这一步报错如下,则可通过替换安装文件的相应文件保证编译成功,用于替换的文件在此。按照里面的Readme文件来完成替换。重新执行后面两步即可顺利编译。

4.3 运行autoware
$ cd $HOME/Autoware/ros
$ ./run