FCN 论文代码解读(二)-模型构建
FCN 论文代码解读二–模型构建
- FCN
参数类别数
class FCN(nn.Module):
def __init__(self, num_classes):
super().__init__()
self.stage1 = pretrained_net.features[:7] # 一第一个block conv relu bn pooling 一共6层
self.stage2 = pretrained_net.features[7:14]
self.stage3 = pretrained_net.features[14:24]
self.stage4 = pretrained_net.features[24:34]
self.stage5 = pretrained_net.features[34:]
self.scores1 = nn.Conv2d( 512, num_classes, 1) # FCN 32S 预测图
self.scores2 = nn.Conv2d(512, num_classes, 1) # # FCN 16S
self.scores3 = nn.Conv2d(128, num_classes, 1) # FCN 8S
self.conv_trans1 = nn.Conv2d(512, 256, 1) # 过度,1x1 conv
self.conv_trans2 = nn.Conv2d(256, num_classes, 1)
self.upsample_8x = nn.ConvTranspose2d(num_classes, num_classes, 16, 8, 4, bias=False)
self.upsample_8x.weight.data = bilinear_kernel(num_classes, num_classes, 16)
self.upsample_2x_1 = nn.ConvTranspose2d(512, 512, 4, 2, 1, bias=False)
self.upsample_2x_1.weight.data = bilinear_kernel(512, 512, 4)
self.upsample_2x_2 = nn.ConvTranspose2d(256, 256, 4, 2, 1, bias=False) #2倍
self.upsample_2x_2.weight.data = bilinear_kernel(256, 256, 4)
前向传播forward
以VGG16为例,调用torch自带模型,获取模型架构,pre_trained =True
====打印出来理解更深刻:
如下为打印结果,可知0-6为一个block,以此类推,一个pooling一个划分。
Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): ReLU(inplace=True)
(6): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(7): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(9): ReLU(inplace=True)
(10): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(12): ReLU(inplace=True)
(13): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(14): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(16): ReLU(inplace=True)
(17): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(19): ReLU(inplace=True)
(20): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(21): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(26): ReLU(inplace=True)
(27): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(28): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(29): ReLU(inplace=True)
(30): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(31): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(32): ReLU(inplace=True)
(33): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(34): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(35): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(36): ReLU(inplace=True)
(37): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(38): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(39): ReLU(inplace=True)
(40): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(41): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(42): ReLU(inplace=True)
(43): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
维度变化举例分析:
输入一张图片【352 480 3】,RGB
经过5个stage后,[276 240 64],[88 120 128],[ 44 60 256],[22 30 512],[11 15 512]
再上采样和skip connection
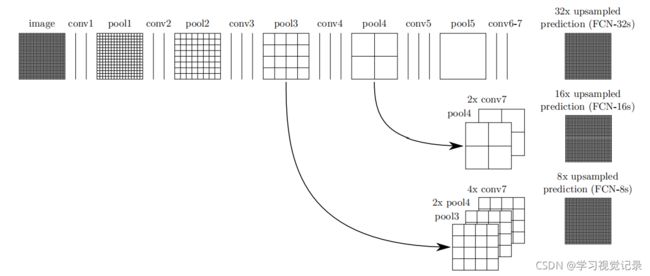
FCN8s:为例:
POOL3+POOL4+ POOL5
add1= s5 + s4上采样---->22 30 512
s3+add1上采样 —> 44 60 256
def forward(self, x): # x 352 480 3
s1 = self.stage1(x) # 276 240 64 一半
s2 = self.stage2(s1) # 88 120 128
s3 = self.stage3(s2) # 44 60 256
s4 = self.stage4(s3) # 22 30 512
s5 = self.stage5(s4) # 11 15 512
scores1 = self.scores1(s5)
s5 = self.upsample_2x_1(s5)
add1 = s5 + s4 # 22 30 512
scores2 = self.scores2(add1) # 22 30 12
add1 = self.conv_trans1(add1) # 过度卷积,改变通道数 512-》256
add1 = self.upsample_2x_2(add1) #扩大尺寸 44 60 256
add2 = add1 + s3
output = self.conv_trans2(add2) # 过度卷积,改变通道数 256 ---》12 ,44 60, 12
output = self.upsample_8x(output) # 44*8, 60*8, 12
return output
可以
3. 参数初始化
bilinear_kernel(in_channels, out_channels, kernel_size)
通过参数获得初始化weight,双线性插值公式可以参考:
https://blog.csdn.net/weixin_40163266/article/details/113776345?ops_request_misc=&request_id=&biz_id=102&utm_term=%E5%8F%8C%E7%8E%B0%E8%B1%A1%E6%8F%92%E5%80%BC&utm_medium=distribute.pc_search_result.none-task-blog-2blogsobaiduweb~default-2-113776345.pc_v2_rank_blog_default&spm=1018.2226.3001.4450.
~~