离散连续系统仿真(汽车自动停车系统和弹跳球运动模型) matlab
文章目录
- 一、汽车自动停车系统
-
- 1.1 实验描述
- 1.2 实验目的
- 1.3 建模
-
- 1)建立这个自动停车系统的混成自动机模型:
- 2)状态图
- 1.4 Simulink仿真
-
- 1.4.1 仿真图
- 1.4.2 仿真结果
- 1.5 实验体会
- 二、弹跳球运动模型
-
- 2.1 实验描述
- 2.2 实验目的
- 2.3 建模
-
- 1)建立这个弹跳球运动系统的混成自动机模型:
- 2)状态图
- 2.4 Simulink仿真
-
- 2.4.1 仿真图
- 2.4.2 仿真结果
- 2.5 实验体会
一、汽车自动停车系统
1.1 实验描述
汽车自动停车系统按照汽车分成三个阶段进行,第一阶段是匀减速行驶, 减速的加速度是dv/dt=-1.35(米/秒平方),当车速到达每小时20公里速度时,进入第二阶段,第二阶段也是减速行驶,减速的加速度是dv/dt=0.09t-4.36(米/秒平方),当车速到达为零时,汽车进入第三阶段,停车。车速初始速度为100公里/小时。
1.2 实验目的
使用Simulink对汽车自动停车系统进行仿真,绘制停车速度,停车距离,停车时间。
1.3 建模
1)建立这个自动停车系统的混成自动机模型:
1、离散状态集 Q={匀减速,减速,停车};
2、连续状态集 X=R2,连续变量 x 代表二维向量(v,s), v车辆的行驶速度,s是车辆行驶距离,它们都是时间 t 的函数;
3、向量场函数 F(·,·):{匀减速,减速,停车}×X→R2:
F(匀减速,x)=(dv∕dt=-1.35,ds/dt=v0-1.35t),速度匀速下降;
F(减速,x)=(dv∕dt=0.09t-4.36,ds/dt=v0+0.09t2-4.36t),车辆行驶加速度下降;
F(停车,x) =(dv/dt = 0,ds/dt=0),车辆速度为0;
4、初始状态集 Init:{匀减速}×{v=100/3.6,s=0};
5、域函数 Dom(·):Q →P(X)定义为:
Dom(匀减速)={v>20/3.6},规定 匀减速状态下车辆速度超过 20/3.6米/秒;
Dom(减速)={0
匀减速→减速:匀减速 状态到 减速 状态有一条边,
减速→停车:减速状态到 停车状态有一条边;
7、转换条件 G(·):E →P(X):
(1)G(匀减速→减速) ={v=20/3.6},从匀减速状态转换到减速状态的条件是汽车速度等于 20/3.6米/秒。
(2)G(减速→停车 )={v=0},从减速状态转换到停车状态的条件是汽车速度等于0米/秒。
8、重置映射 R(·,·):E×X→ P(X):
为每个边都指定了一个空集,即没有重置动作,在状态转换过程中车辆速度变量 x不进行重置,保留变换前的值。
2)状态图

图1 汽车自动停车系统状态图
1.4 Simulink仿真
1.4.1 仿真图
图2是汽车自动停车系统stateflow状态图,最左边为匀减速状态,中间是减速状态,最右边是停车状态。v是速度,s是距离,t是时间。
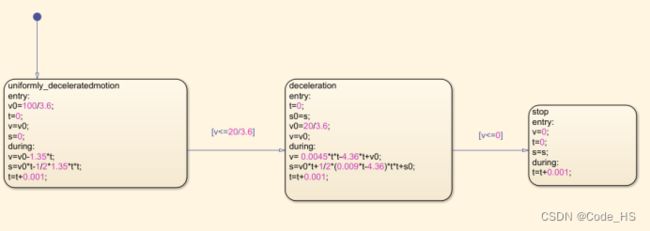
图2 汽车自动停车系统stateflow图
图3是stateflow的输入和输出,v、t、s是输出,clock是时钟触发输入。

图3 stateflow中symbols
图4是simulink仿真模型,对stateflow增加了一个时钟触发事件,每0.01秒事件触发一次。将stateflow的输出连接到scope示波器上。

图4 汽车自动停车系统simulink模型
1.4.2 仿真结果
双击示波器可以看到仿真结果,如图5,蓝色是时间,黄色是车辆速度,单位为米/秒,红色是车辆行驶距离,单位米。
图5 汽车自动停车系统simulink仿真结果
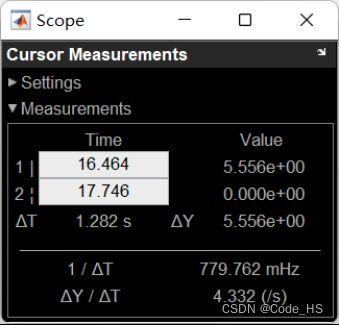
图6 汽车自动停车系统状态变化时间点
从图6中可以看到,在第一个竖线处,16.464秒处,汽车从匀减速状态转换到减速状态,在第二个竖线处,17.746处,汽车从减速状态转换为停车状态。
1.5 实验体会
通过此次实验,学习了解了simulink中子系统,时钟与示波器的使用。对于stateflow中的状态,变化方程不能写错,可以通过仿真结果图找出哪个地方出了问题。
二、弹跳球运动模型
2.1 实验描述
让球体在高度h处放下做自由落体运动,当落地时受到下落力作用,球会弹起,速度损失20%,到最高处又会受到地球引力作用做自由落体运动,这样反复落-弹运动,直到球落地不再弹起为止。
2.2 实验目的
建立弹跳球运动系统的Simulink模型,并对参数h分别等于100厘米和200厘米进行仿真。
2.3 建模
1)建立这个弹跳球运动系统的混成自动机模型:
1、离散状态集 Q={down,up};down表示下落,up表示上升
2、连续状态集 X=R2,连续变量 x是二维向量(v,h) v代表球体的速度,往下为正,往上为负,h代表球体的高度, 都是时间 t 的函数。
3、向量场函数 F(·,·):{down,up}×X→R2:
F(down,x)=(dv∕dt=g,dh/dt=-gt),小球下降;
F(up,v)=(dv∕dt=g,dh/dt=-v-gt),小球上升;
4、初始状态集 Init:{down}×{v=0^h=1};
5、域函数 Dom(·):Q →P(X)定义为:
Dom(down)={v>=0^h>0},规定 下降状态下弹跳球速度大于等于0并且高度大于0;
Dom(up)={v<0},规定上升状态下弹跳球速度为负,即反向;
6、边集 E Q×Q:
down→up:down 状态到 up状态有一条边;
up→down:up 状态到 down状态有一条边;
7、转换条件 G(·):E →P(X):
(1)G(down→up) ={h=0},从down状态转换到up状态的条件是球体高度等于 0。
(2)G(up→down )={v=0},从up状态转换到down状态的条件是球体速度等于0。
8、重置映射 R(·,·):E×V→ P(X):R(down→up,x)={v=-0.8v}速度损失百分之二十且反向。
2)状态图

图7 弹跳球状态图
2.4 Simulink仿真
2.4.1 仿真图
在这里插入图片描述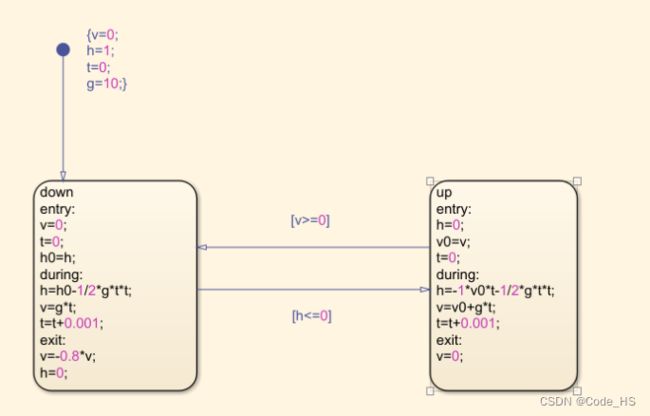
图8 弹跳球运动 Stateflow 模型
图8是stateflow状态图,左边是down状态,右边是up状态,v代表速度,单位米/秒、t代表时间,单位秒、h代表球的高度,单位m;

图9 stateflow中symbols
图9是stateflow的输入和输出,h、v、t是输出,clock是时钟触发输入。

图10 弹跳球运动simulink模型
图10是simulink仿真图,对stateflow增加了一个时钟触发事件,每0.01秒事件触发一次。将stateflow的输出连接到scope示波器上。
2.4.2 仿真结果
1)对h等于100厘米进行仿真
横坐标代表时间,
蓝色线代表小球的速度,正数表示向下,负数表示向上,单位为米/秒;
黄色线代表弹球的高度,单位为米;
红色线代表时间,单位秒;
可以观察到弹球的高度变化为二次函数型,高度与速度逐渐缩小到0;
图11 h=100厘米时simulink仿真结果

2)对h等于200厘米进行仿真

图12 h=200厘米时simulink仿真结果
2.5 实验体会
通过此次实验,学习了解了matlab的simulink仿真,状态间的转换条件与变换状态是值的变化需要理清,不然在状态变换时,状态中的值可能会不按预期的变化发展。