动手学深度学习--线性神经网络篇
线性神经网络
前言:
该大章分为7小章节, 本章我们将介绍神经网络的整个训练过程 :
如下图顺序所示:
1. linear-regression(线性回归)
NOTE:
- 回归(regression)是能为一个或多个自变量与因变量之间关系建模的一类方法: 当我们想预测一个数值时,就会涉及到回归问题
- 不是所有的 预测 都是回归问题, 分类问题的目标是预测数据属于一组类别中的哪一个
- 放射变换: 特点是通过加权和对特征进行线性变换并通过偏置项来进行平移 输出的预测值由输入特征通过线性模型的仿射变换决定,仿射变换由所选权重和偏置确定。
- 通过以下方法:① 一种模型质量的度量方式 ② 能够更新模型以提高模型预测质量的方法 来寻找最好的模型参数 w 与 b
展开:
①LOSS FUNCTION 损失函数 :
-
能够 量化目标的实际值与预测值之间的差距
-
选择非负数作为损失
-
最常用的是平方误差函数
( i ) ( , ) = 1 / 2 ( ^ ( i ) − ( i ) ) 2 . ^{(i)} (,)=1/2(̂ ^{(i)}−^{(i)})^2. l(i)(w,b)=1/2(y^(i)−y(i))2. -
为了能度量 模型在整个数据集上的质量,我们需计算在训练集n个样本上的损失均值 如下式子

-
训练模型时,希望找到下面这组解,能够最小换在所有训练样本的总损失:

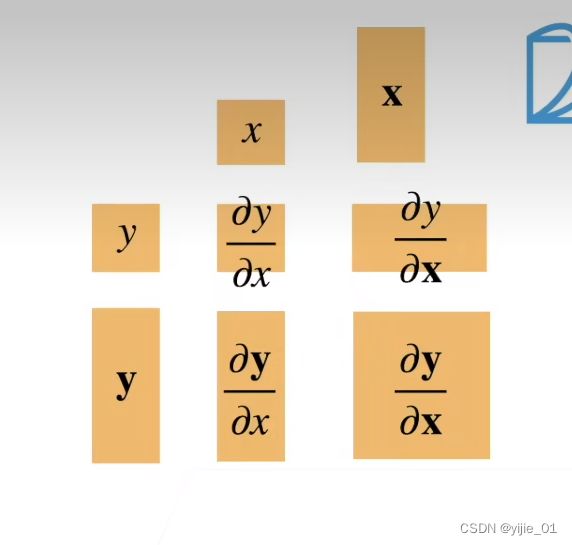
**回忆插入:**线性代数求导变换:
-
解析解: 解 w* 可以用一个公式简单地表达出来
展开:
①将偏差加入权重 
上面意思为:在X的特征矩阵加上全为1的列,在W的权重矩阵加上全为偏置项b的行 这样变化后
X 2 W 2 = = X 1 W 1 + b X~2~W~2~==X~1~W~1~+b X 2 W 2 ==X 1 W 1 +b
②
① L O S S = 1 / 2 ( Y − X 2 W 2 ) 2 ①LOSS=1/2(Y-X~2~W~2~)^2 ①LOSS=1/2(Y−X 2 W 2 )2
② L O S S ′ = 0 ②LOSS'=0 ②LOSS′=0
= = > W ∗ = ( ⊤ ) − 1 ⊤ . ==>W^*=(^⊤)^{−1}^⊤. ==>W∗=(X⊤X)−1X⊤y.
意思是可以通过推导直接得到最佳的W *
-
随机梯度下降 gradient descent
展开:
①小批量随机梯度下降 minibatch stochastic gradient descent
解释:
-
小批量

: 由固定数量的训练样本组成的 -
学习率

-
偏导数

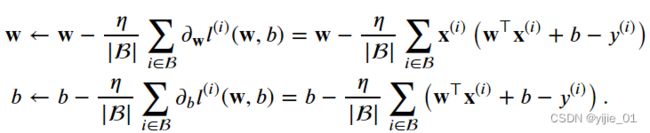
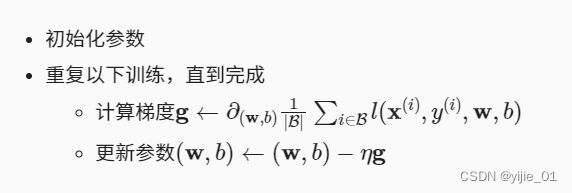
用下面的数学公式表示权重更新:
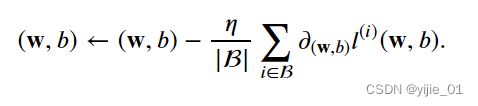
②该算法的步骤为:
具体公式如下:
2.scratch(线性回归的从零开始实现)
章节流程图:
基于高斯分布公式的噪声
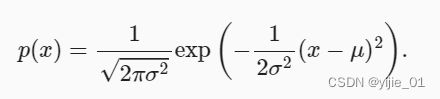
#normal()函数为正态分布函数,定义如下:
def normal(x, mu, sigma):
p = 1 / math.sqrt(2 * math.pi * sigma**2)
return p * np.exp(-0.5 / sigma**2 * (x - mu)**2)
-
生成人工数据集
#torch.normal基于normal函数,生成范围(0,1) shape为
#(num_examples, len(w)的随机噪声数据
def synthetic_data(w, b, num_examples): #@save
"""生成y=Xw+b+噪声"""
#此处因为w为向量,会自动调整w形状便于计算
X = torch.normal(0, 1, (num_examples, len(w)))
y = torch.matmul(X, w) + b
y += torch.normal(0, 0.01, y.shape)
return X, y.reshape((-1, 1))
#synthetic_data()函数返回一组特征以及对应的一组标签 (一组表示多个样本)
#len函数计算第一维大小
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = synthetic_data(true_w, true_b, 1000)
#features中的每一行都包含一个二维数据样本, labels中的每一行都包含一维标签值(一个标量)
-
创建批量数据读取器
#前提 yield作用==return 返回值 并停止函数运行
#包含yield的函数 具有返回作用 同时具有迭代作用
#如next(data_iter)
#该函数接收批量大小、特征矩阵和标签向量作为输入,生成大小为batch_size的小批量。 每个小批量包含一组特征和标签。
def data_iter(batch_size, features, labels):
num_examples = len(features)
① indices = list(range(num_examples))
② random.shuffle(indices)
for i in range(0, num_examples, batch_size):
③ batch_indices = torch.tensor(
indices[i: min(i + batch_size, num_examples)])
④ yield features[batch_indices], labels[batch_indices]
#为便于理解,我进行如下例子展示:
#假设batch_size=3 len(features)=1000
# ① indices=(0,1,2,3,4.....,999)
# ② random.shuffule(indices)后,indices=(5,23,2,546,12.....,543)的随机list
# ③ batch_indices=torch.tensor(5,23,2)
# ④ yield 返回 features中位置分别为(5,23,2)的数据和labels中位置分别为(5,23,2)的数据和
#从而实现了数据随机批量读取
-
从零实现中的参数初始化
w = torch.normal(0, 0.01, size=(2,1), requires_grad=True)
b = torch.zeros(1, requires_grad=True)
-
定义模型
def linreg(X, w, b): #@save """线性回归模型""" return torch.matmul(X, w) + b -
定义损失函数
def squared_loss(y_hat, y): #@save
"""均方损失"""
return (y_hat - y.reshape(y_hat.shape)) ** 2 / 2
-
定义优化算法
此算法基于随机梯度下降实现
def sgd(params, lr, batch_size): #@save
"""小批量随机梯度下降"""
with torch.no_grad():
for param in params:
param -= lr * param.grad / batch_size
param.grad.zero_()
- 训练 我们将执行如下过程
lr = 0.03
num_epochs = 3
net = linreg
loss = squared_loss
for epoch in range(num_epochs):
for X, y in data_iter(batch_size, features, labels):
l = loss(net(X, w, b), y)
# X和y的小批量损失
# 因为l形状是(batch_size,1),而不是一个标量。l中的所有元素被加到一起,
# 并以此计算关于[w,b]的梯度
l.sum().backward()
sgd([w, b], lr, batch_size) # 使用参数的梯度更新参数
with torch.no_grad():
train_l = loss(net(features, w, b), labels)
#解释:
#正向传播:net(X, w, b)
#l为向量,l.sum求得批量损失,l.sum().backward()进行反向传播,即求导,再将中间值存储
#sgd为基于随机梯度下降的优化算法,即更新参数,sgd不会进行求导
3.线性回归的简洁实现
简介:基于深度学习的组件,可以简化实现过程
-
读取数据集
调用框架现有的API进行读取数据
def load_array(data_arrays, batch_size, is_train=True): #@save
"""构造一个PyTorch数据迭代器"""
#data_arrays 解包
# * 将data_arrays分解为(features, labels)
dataset = data.TensorDataset(*data_arrays)
return data.DataLoader(dataset, batch_size, shuffle=is_train)
#is_train表明打乱
batch_size = 10
data_iter = load_array((features, labels), batch_size)
#使用iter构造Python迭代器
iter(object[, sentinel])
#object必须是支持迭代的集合对象
#使用next从迭代器中获取第一项
next(iter(data_iter))
-
定义模型
使用Sequential类
#第一个指定输入特征形状,即2,第二个指定输出特征形状,输出特征形状为单个标量,因此为1
from torch import nn
net=nn.Sequential(nn.Linear(2,1))
-
初始化模型参数
#通过net[0]选择网络中的第一个图层, 然后使用weight.data和bias.data方法访问参数。 我们还可以使用替换方法normal_和fill_来重写参数值
net[0].weight.data.normal_(0, 0.01)
net[0].bias.data.fill_(0)
-
定义损失函数
#计算均方误差使用的是MSELoss类,也称为L2平方范数。 默认情况下,它返回所有样本损失的平均值。
loss = nn.MSELoss()
-
定义优化算法
#net.parameters()从模型中获得
trainer = torch.optim.SGD(net.parameters(), lr=0.03)
-
训练
num_epochs = 3
for epoch in range(num_epochs):
for X, y in data_iter:
l = loss(net(X) ,y)
trainer.zero_grad()#梯度清零防止上次的结果影响
l.backward()#反向传播 即求导
trainer.step()#梯度更新
l = loss(net(features), labels)
print(f'epoch {epoch + 1}, loss {l:f}')
#查看模型具体值
w = net[0].weight.dataprint('w的估计误差:', true_w - w.reshape(true_w.shape))
b = net[0].bias.data
print('b的估计误差:', true_b - b)
4.SOFTMAX回归
简介:用于分类问题
| 硬性类别 | 软性类别 |
|---|---|
| 属于那个类别 | 属于每个类别的概率 |
-
One-Hot encoding 独热编码
类别对应的分量设置为1,其他所有分量设置为0,
例:(1,0,0)对应猫、(0,1,0)对应鸡、(0,0,1)对应狗 :
-
网络架构
该模型具有多个输出,每个类别对应一个未规范化输出

为了简介表达,使用向量形式:![]()
此处W为3X4的矩阵
-
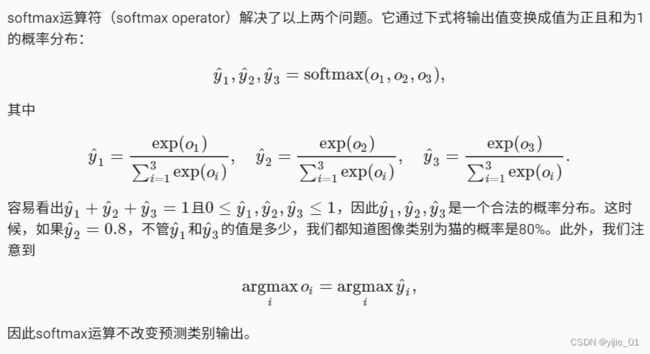
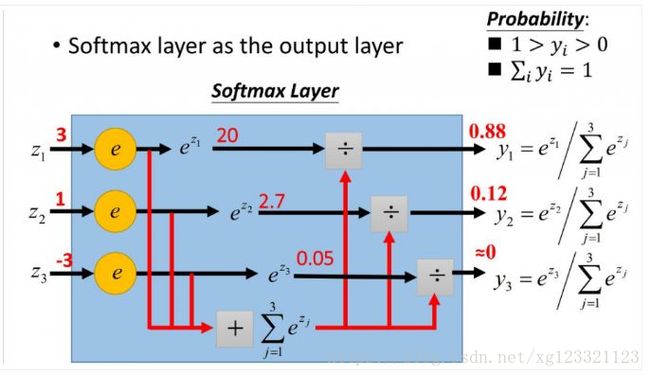
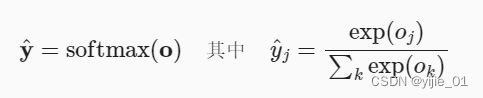
SoftMax运算
将输出Oi视作类i的概率的前提是:
①输出O的总和为1
②0<=Oi<=1
-
小批量样本的矢量化
-
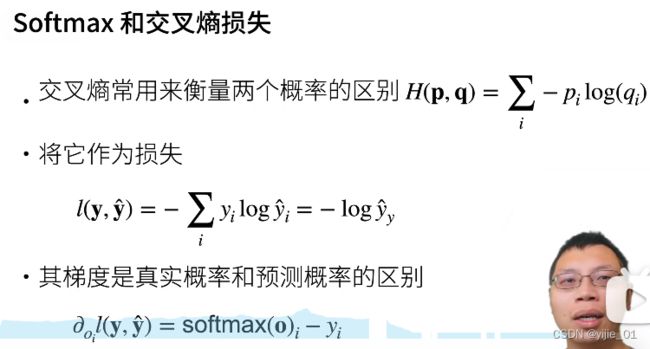
损失函数
交叉熵( Cross Entropy Loss)
①交叉熵的结果是一种期望,可以衡量模型与理想模型的差距
②交叉熵的结果是凸函数,更利于优化
5.图像分类数据集
采用 Fashion–MNIST数据集
6.SoftMax回归的从零开始实现
-
初始化模型参数
#Fashion-MNIST的原始数据集每个样本为1X28X28图像,共有10个类别,此处不考虑空间特征,展平为长度为784的向量(1X784)
#于是输入呈现为(NX784)
num_inputs = 784
num_outputs = 10
W = torch.normal(0, 0.01, size=(num_inputs, num_outputs), requires_grad=True)
b = torch.zeros(num_outputs, requires_grad=True)
-
定义SoftMax操作
首先回顾.sum预算符如何沿着张量中的特定维度工作
如果X是一个形状为(2, 3)的张量,我们对列进行求和, 则结果将是一个具有形状(3,)的向量
示例代码
X = torch.tensor([[1.0, 2.0, 3.0], [4.0, 5.0, 6.0]])
X.sum(0, keepdim=True), X.sum(1, keepdim=True)
输出为:
(tensor([[5., 7., 9.]]),
tensor([[ 6.],
[15.]]))
然后我们来回顾一下SoftMax的归一化:
#实现如下
def softmax(X):
X_exp = torch.exp(X)#按元素操作x=>lnx (x∈X)
partition = X_exp.sum(1, keepdim=True)
return X_exp / partition # 这里应用了广播机制
for example
X=[[1,2,3,4]] X的shape为(1,4)
X_exp=[[ln1,ln2,ln3,ln4]] shape为(1,4)
partition=[[ln1+ln2+ln3+ln4]] shape为(1,1)
(因为keepdim=True)
最后
X_exp / partition shape为[1,4]
因为广播机制在运算中 将partition shape (1,1)=>相等元素的(1,4) 对应元素相除
正如你所看到的,对于任何随机输入,我们将每个元素变成一个非负数。 此外,依据概率原理,每行总和为1。
-
定义模型
自定义的模型自动将输出softmax归一化
而高级API则在nn.CrossEntropyLoss()的损失函数中自动进行归一化
def net(X):
return softmax(torch.matmul(X.reshape((-1, W.shape[0])), W) + b)
-
定义损失函数
def cross_entropy(y_hat, y):
return - torch.log(y_hat[range(len(y_hat)), y])
#range(len(y_hat))=(0,1)结合例子看
cross_entropy(y_hat, y)
举例:
y = torch.tensor([0, 2])
y_hat = torch.tensor([[0.1, 0.3, 0.6], [0.3, 0.2, 0.5]])
y_hat[[0, 1], y] #代表 y_hat (0,1)行(0,2)列的元素
result:
tensor([0.1000, 0.5000])
使用cross_entropy函数
cross_entropy(y_hat, y)
result:
tensor([2.3026, 0.6931])
-
分类精度
当我们必须输出hard-prediction(硬预测)时,通常选择预测概率最高的类
分类精度即正确预测数量与总预测数量之比
如何用代码实现计算分类精度?
前提:若y_hat为矩阵, 假定第二个维度存储每个类的预测分数
步骤:
- 使用
argmax获得每行中最大元素的索引来获得预测类别
举例:
In : a = np.array([[1, 3, 5, 7],[5, 7, 2, 2],[4, 6, 8, 1]])
Out: [[1, 3, 5, 7],
[5, 7, 2, 2],
[4, 6, 8, 1]]
In : b = np.argmax(a, axis=0) # 对数组按列方向搜索最大值
Out: [1 1 2 0]
In : b = np.argmax(a, axis=1) # 对数组按行方向搜索最大值
Out: [3 1 2]
- 将索引与真实y比较 ( “
==”对数据类型敏感,因此我们将y_hat的数据类型转换为与y的数据类型一致 ) - 因为结果是为0 or 1的tensor,所以求和得到预测正确数量
实现代码如下:
def accuracy(y_hat, y): #@save
"""计算预测正确的数量"""
if len(y_hat.shape) > 1 and y_hat.shape[1] > 1:#如果y_hat中元素个数>1
y_hat = y_hat.argmax(axis=1)#获取每行最大元素的索引 索引
cmp = y_hat.type(y.dtype) == y
return float(cmp.type(y.dtype).sum())
#①y_hat.type(y.dtype)将y_hat数据类型转化为y的数据类型
#② cmp = y_hat.type(y.dtype) == y 得到比较后的bool矩阵
#③ float(cmp.type(y.dtype).sum())
#先将cmp的bool值转化为y的数据类型并求和,然后将和转为float,便于后续精度计算
计算精度:
accuracy(y_hat, y) / len(y)
#result: 0.5
#函数运行过程解释:
#进入accuracy函数,y_hat=[2,2]因为argmax得到的是索引
#cmp=[2,2]==[0,2]
#cmp的结果为[False,Ture]
#float(cmp.type(y.dtype).sum())==1.0
#退出accuracy函数,1.0/2=0.5
同样,对于任意数据迭代器data_iter可访问的数据集, 我们可以评估在任意模型net的精度
def evaluate_accuracy(net, data_iter): #@save
"""计算在指定数据集上模型的精度"""
#如果net为torch.nn.Module子类,则设为评估模式
if isinstance(net, torch.nn.Module):
net.eval() # 将模型设置为评估模式
#创建存储可以累加的存有2个数值的metric
metric = Accumulator(2) # 正确预测数、预测总数
with torch.no_grad():
for X, y in data_iter:
#metic分别累加正确预测数、预测总数
metric.add(accuracy(net(X), y), y.numel())
#得到模型总分类精度
return metric[0] / metric[1]
result:
evaluate_accuracy(net, test_iter)
=>0.0516
回忆:
①isinstance函数
isinstance()函数用来判断一个对象是否是一个已知的类型,考虑继承关系
,认为子类是一种父类类型
语法
isinstance(object, classinfo)
参数
object -- 实例对象
classinfo -- 可以是直接或间接类名、基本类型或者由它们组成的元组
返回值
如果对象的类型与参数二的类型(classinfo)相同则返回 True,否则返回 False
示例1
a=2
isinstance(a,int) =>True
isinstance(a,str) =>False
isinstance(a,(str,int,list)) #若是元组中的一个返回True =>True
示例2
class A:
pass
class B(A):
pass
isinstance(A(),A) =>True
isinstance(B(),A) =>True
② net.eval or net.train函数
a) model.eval(),不启用 BatchNormalization 和 Dropout。此时pytorch会自动把BN和DropOut固定住,不会取平均,而是用训练好的值。不然的话,一旦test的batch_size过小,很容易就会因BN层导致模型performance损失较大;
b) model.train() :启用 BatchNormalization 和 Dropout。 在模型测试阶段使用model.train() 让model变成训练模式,此时 dropout和batch normalization的操作在训练q起到防止网络过拟合的问题。
因此,在使用PyTorch进行训练和测试时一定要记得把实例化的model指定train/eval
③自行定义的Accumulator函数,用于对多个变量进行累加
class Accumulator: #@save
"""在n个变量上累加"""
def __init__(self, n):
self.data = [0.0] * n
def add(self, *args):
self.data = [a + float(b) for a, b in zip(self.data, args)]
def reset(self):
self.data = [0.0] * len(self.data)
def __getitem__(self, idx):
return self.data[idx]
-
训练
updater是更新模型参数的常用函数,它接受批量大小作为参数。 它可以是d2l.sgd函数,也可以是框架的内置优化函数。
def train_epoch_ch3(net,train_iter,loss,updater):
# 将模型设置为训练模式
if isinstance(net,torch.nn.Module):
net.tarin()
#创建可以累加的具有三个数值的metric
# 训练损失总和、训练准确度总和、样本数
metric=Accumulator(3)
for X,y in train_iter:
y_hat=net(X)
l=loss(y_hat,y)
#如果优化器为optim.Optimizer的子类
if isinstance(updater,torch.optim.Optimizer):
# 使用PyTorch内置的优化器和损失函数
updater.zero_grad()#存储的梯度清除
l.mean().backward()#求l梯度
updater.step()#参数更新
#否则
else:
# 使用定制的优化器和损失函数
l.sum().backward()#求l梯度
updater(X.shape[0])
metric.add(float(l.sum()), accuracy(y_hat, y), y.numel())
# 返回训练损失和训练精度
return metric[0] / metric[2], metric[1] / metric[2]
#return的第一个是 LOSS/total 第二个是 right/total
在展示训练函数的实现之前,我们定义一个在动画中绘制数据的实用程序类Animator, 它能够简化本书其余部分的代码。
class Animator: #@save
"""在动画中绘制数据"""
def __init__(self, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), nrows=1, ncols=1,
figsize=(3.5, 2.5)):
# 增量地绘制多条线
if legend is None:
legend = []
d2l.use_svg_display()
self.fig, self.axes = d2l.plt.subplots(nrows, ncols, figsize=figsize)
if nrows * ncols == 1:
self.axes = [self.axes, ]
# 使用lambda函数捕获参数
self.config_axes = lambda: d2l.set_axes(
self.axes[0], xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
self.X, self.Y, self.fmts = None, None, fmts
def add(self, x, y):
# 向图表中添加多个数据点
if not hasattr(y, "__len__"):
y = [y]
n = len(y)
if not hasattr(x, "__len__"):
x = [x] * n
if not self.X:
self.X = [[] for _ in range(n)]
if not self.Y:
self.Y = [[] for _ in range(n)]
for i, (a, b) in enumerate(zip(x, y)):
if a is not None and b is not None:
self.X[i].append(a)
self.Y[i].append(b)
self.axes[0].cla()
for x, y, fmt in zip(self.X, self.Y, self.fmts):
self.axes[0].plot(x, y, fmt)
self.config_axes()
display.display(self.fig)
display.clear_output(wait=True)
接下来我们实现一个训练函数, 它会在train_iter访问到的训练数据集上训练一个模型net。 该训练函数将会运行多个迭代周期(由num_epochs指定)。 在每个迭代周期结束时,利用test_iter访问到的测试数据集对模型进行评估。 我们将利用Animator类来可视化训练进度。
def train_ch3(net, train_iter, test_iter, loss, num_epochs, updater): #@save
"""训练模型(定义见第3章)"""
animator = Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0.3, 0.9],legend=['train loss', 'train acc', 'test acc'])
for epoch in range(num_epochs):
#在train_epoch_ch3进行批量数据前向传播,求导,更新参数,最终返回损失精度与模型准确精度(训练集)
train_metrics = train_epoch_ch3(net, train_iter, loss, updater)
#在每次更新模型参数后,用测试集进行模型精度测试 test_acc为小数
test_acc = evaluate_accuracy(net, test_iter)
#画出每个epoch下的损失精度与模型准确精度(训练集)与模型准确精度(测试集)
animator.add(epoch + 1, train_metrics + (test_acc,))
# train_loss为损失精度 train_acc为模型准确精度(训练集)
train_loss, train_acc = train_metrics
assert train_loss < 0.5, train_loss
assert train_acc <= 1 and train_acc > 0.7, train_acc
assert test_acc <= 1 and test_acc > 0.7, test_acc
#assert 为断言句 assert condition,expression 类似 if not condition: expression
#如果不满足 condition 直接中断程序,在终端报出expression
#举例: assert train_loss < 0.5, train_loss ||if train_loss>=0.5 中断运行并报出 train_loss,else 继续向下运行
作为一个从零开始的实现,我们使用小批量随机梯度下降来优化模型的损失函数,设置学习率为0.1。
lr = 0.1
def updater(batch_size):
return d2l.sgd([W, b], lr, batch_size)
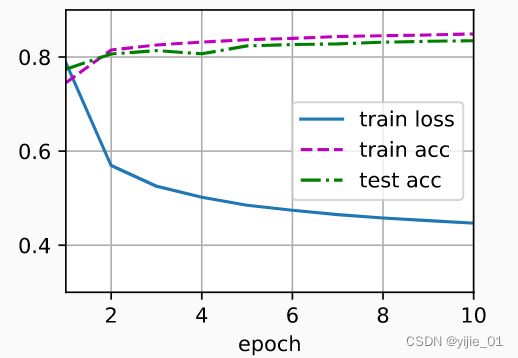
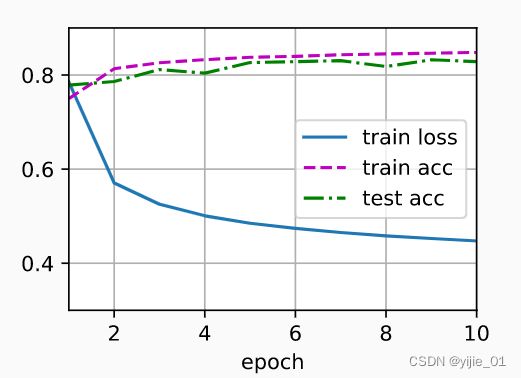
现在,我们训练模型10个迭代周期。 请注意,迭代周期(num_epochs)和学习率(lr)都是可调节的超参数。 通过更改它们的值,我们可以提高模型的分类精度。
num_epochs = 10
train_ch3(net, train_iter, test_iter, cross_entropy, num_epochs, updater)
结果:
-
预测
def predict_ch3(net, test_iter, n=6): #@save
"""预测标签(定义见第3章)"""
for X, y in test_iter:
break
#获得真实标签对应的文字标签。详细请看自定义函数d2l.get_fashion_mnist_labels 章节3.4
trues = d2l.get_fashion_mnist_labels(y)
#获得预测标签对应的文字标签 argmax得到数字标签,数字标签对应 文字标签
preds = d2l.get_fashion_mnist_labels(net(X).argmax(axis=1))
#titles最终呈现效果为第一行true文字标签+第二行preds文字标签
titles = [true +'\n' + pred for true, pred in zip(trues, preds)]
d2l.show_images(
X[0:n].reshape((n, 28, 28)), 1, n, titles=titles[0:n])
predict_ch3(net, test_iter)
结果如下:

7.SoftMax的简洁实现
-
读取数据集
import torch
from torch import nn
from d2l import torch as d2l
batch_size = 256
train_iter,test_iter=d2l.load_data_fashion_mnist(batch_size)
-
初始化模型参数
# PyTorch不会隐式地调整输入的形状。因此,
# 我们在线性层前定义了展平层(flatten),来调整网络输入的形状
#Flatten层用来将输入“压平”,即把多维的输入一维化,常用在从卷积层到全连接层的过渡。Flatten不影响batch的大小
net = nn.Sequential(nn.Flatten(), nn.Linear(784, 10))
def init_weights(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights);
举例:
output.shape=3X32X64=6144
-
重新审视SoftMax的实现

问题如下:
① O j 过 大 , e x p ( O j ) 超 过 数 据 类 型 最 大 范 围 , 造 成 数 据 溢 出 ( 上 溢 o v e r f l o w ) ①~~Oj过大,exp(Oj)超过数据类型最大范围,造成数据溢出(上溢 overflow) ① Oj过大,exp(Oj)超过数据类型最大范围,造成数据溢出(上溢overflow)
这将使分母或分子变为inf(无穷大 )最后得到的是0、inf或nan(不是数字)的y_hat
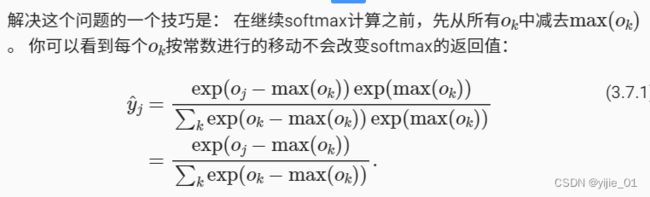
② a = O j − m a x ( O k ) 可 能 有 较 大 的 负 值 , e x p ( a ) 接 近 0 , 下 溢 ( u n d e r f l o w ) ②a=Oj-max(Ok)可能有较大的负值,exp(a)接近0,下溢(underflow) ②a=Oj−max(Ok)可能有较大的负值,exp(a)接近0,下溢(underflow)
这些值可能会四舍五入为零,使y_hat为零, 并且使得log(y_hat)的值为-inf。 反向传播几步后,我们可能会发现自己面对一屏幕可怕的nan结果。
为什么不必担心 ?
?
因为∑kexp(Ok)==∑kexp(Ok-max(Ok)) exp(max(Ok))==1,而1>∑kexp(Ok-max(Ok))>0,在-loge(∑kexp(Ok-max(Ok)))的帮助下会形成一个正数
(因水平有限,此处不能解释充分)
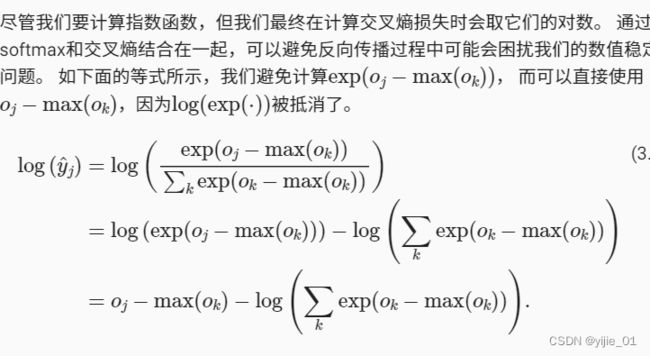
我们也希望保留传统的softmax函数,以备我们需要评估通过模型输出的概率。 但是,我们没有将softmax概率传递到损失函数中, 而是在交叉熵损失函数中传递未规范化的预测,并同时计算softmax及其对数
loss = nn.CrossEntropyLoss(reduction='none')
#上述意思是,在net中的softmax不再在net中进行,而是在CorssEntropyLoss中进行损失计算同时计算softmax及其对数
#为什么这么做?
#如果在net中进行sotfmax,可能存在上溢出或下溢出,虽然仍然能够正常输出,但基于此输出进行的交叉熵损失计算就会出现问题。
#所以,基于简化后的数学公式,我们直接在CorssEntropyLoss中接收未规范化的预测然后进行交叉熵计算得到损失,同时计算softmax的规范值作为最终net规范化输出
**注意:**虽然归一化和交叉熵损失都在 nn.CrossEntropyLoss进行,但交叉熵损失计算使用的是未规范化的预测,而net的输出是在nn.CrossEntropyLoss进行SoftMax之后的规范值
-
优化算法
trainer = torch.optim.SGD(net.parameters(), lr=0.1)
-
训练
num_epochs = 10
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
result:
该文章的目的是:
①作为学习笔记,方便后续回忆巩固
②详细解释高级API与整个实现过程,防止一知半解