【记录】如何配置NWPU-CROD数据集
1.下载NWPU
地址:NWPU-Crowd: A Large-Scale Benchmark for Crowd Counting and Localization
2.如何解压缩
首先会得到如图所示的文件
 创建空的三个文件夹:images,jsons,mats。
创建空的三个文件夹:images,jsons,mats。
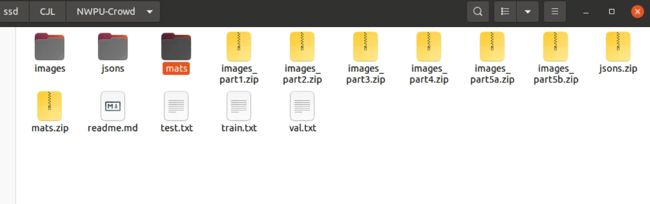
将images 1-5b解压到images,part1-4都是1000张,5a 500张,5b 609张
最终images中会解压出5109张照片,不要文件夹里面套文件夹。

mats中解压缩mats.zip,得到3609项,
同理得到jsons,一共3609个json文件
3.处理NWPU
习惯上我还是用cctrans的代码来处理,
地址:GitHub - wfs123456/CCTrans: Code Reproduction
主要涉及两个py文件,打开里面的preprocess_dataset.py,你也可以自己创建新的py文件导入代码。首先进行路径配置:
# preprocess_dataset.py
# Preprocess images in QNRF and NWPU dataset.
import argparse
parser = argparse.ArgumentParser(description='Preprocess')
parser.add_argument('--dataset', default='nwpu',
help='dataset name, only support qnrf and nwpu')
parser.add_argument('--input-dataset-path', default='data/nwpu', # 改成你刚刚解压缩好的路径
help='original data directory')
parser.add_argument('--output-dataset-path', default='data/NWPU-Train-Val-Test',
help='processed data directory') # 新建一个NWPU-Train-Val-Test文件夹,改成这个新建的文件夹路径
args = parser.parse_args()
if args.dataset.lower() == 'qnrf':
from preprocess.preprocess_dataset_qnrf import main
main(args.input_dataset_path, args.output_dataset_path, 512, 2048)
elif args.dataset.lower() == 'nwpu':
from preprocess.preprocess_dataset_nwpu import main
main(args.input_dataset_path, args.output_dataset_path, 384, 1920)
else:
raise NotImplementedError其他就可以不管了。如果你是自己创建py文件,还有写一个py文件:preprocess_dataset_nwpu.py
from scipy.io import loadmat
from PIL import Image
import numpy as np
import os
import cv2
def cal_new_size_v2(im_h, im_w, min_size, max_size):
rate = 1.0 * max_size / im_h
rate_w = im_w * rate
if rate_w > max_size:
rate = 1.0 * max_size / im_w
tmp_h = int(1.0 * im_h * rate / 16) * 16
if tmp_h < min_size:
rate = 1.0 * min_size / im_h
tmp_w = int(1.0 * im_w * rate / 16) * 16
if tmp_w < min_size:
rate = 1.0 * min_size / im_w
tmp_h = min(max(int(1.0 * im_h * rate / 16) * 16, min_size), max_size)
tmp_w = min(max(int(1.0 * im_w * rate / 16) * 16, min_size), max_size)
rate_h = 1.0 * tmp_h / im_h
rate_w = 1.0 * tmp_w / im_w
assert tmp_h >= min_size and tmp_h <= max_size
assert tmp_w >= min_size and tmp_w <= max_size
return tmp_h, tmp_w, rate_h, rate_w
def gen_density_map_gaussian(im_height, im_width, points, sigma=4):
"""
func: generate the density map.
points: [num_gt, 2], for each row: [width, height]
"""
density_map = np.zeros([im_height, im_width], dtype=np.float32)
h, w = density_map.shape[:2]
num_gt = np.squeeze(points).shape[0]
if num_gt == 0:
return density_map
for p in points:
p = np.round(p).astype(int)
p[0], p[1] = min(h - 1, p[1]), min(w - 1, p[0])
gaussian_radius = sigma * 2 - 1
gaussian_map = np.multiply(
cv2.getGaussianKernel(int(gaussian_radius * 2 + 1), sigma),
cv2.getGaussianKernel(int(gaussian_radius * 2 + 1), sigma).T
)
x_left, x_right, y_up, y_down = 0, gaussian_map.shape[1], 0, gaussian_map.shape[0]
# cut the gaussian kernel
if p[1] < gaussian_radius:
x_left = gaussian_radius - p[1]
if p[0] < gaussian_radius:
y_up = gaussian_radius - p[0]
if p[1] + gaussian_radius >= w:
x_right = gaussian_map.shape[1] - (gaussian_radius + p[1] - w) - 1
if p[0] + gaussian_radius >= h:
y_down = gaussian_map.shape[0] - (gaussian_radius + p[0] - h) - 1
gaussian_map = gaussian_map[y_up:y_down, x_left:x_right]
if np.sum(gaussian_map):
gaussian_map = gaussian_map / np.sum(gaussian_map)
density_map[
max(0, p[0] - gaussian_radius):min(h, p[0] + gaussian_radius + 1),
max(0, p[1] - gaussian_radius):min(w, p[1] + gaussian_radius + 1)
] += gaussian_map
density_map = density_map / (np.sum(density_map / num_gt))
return density_map
def generate_data(im_path, mat_path, min_size, max_size):
im = Image.open(im_path).convert('RGB')
im_w, im_h = im.size
points = loadmat(mat_path)['annPoints'].astype(np.float32)
if len(points) > 0: # some image has no crowd
idx_mask = (points[:, 0] >= 0) * (points[:, 0] <= im_w) * (points[:, 1] >= 0) * (points[:, 1] <= im_h)
points = points[idx_mask]
im_h, im_w, rr_h, rr_w = cal_new_size_v2(im_h, im_w, min_size, max_size)
im = np.array(im)
if rr_h != 1.0 or rr_w != 1.0:
im = cv2.resize(np.array(im), (im_w, im_h), cv2.INTER_CUBIC)
if len(points) > 0: # some image has no crowd
points[:, 0] = points[:, 0] * rr_w
points[:, 1] = points[:, 1] * rr_h
density_map = gen_density_map_gaussian(im_h, im_w, points, sigma=8)
return Image.fromarray(im), points, density_map
def generate_image(im_path, min_size, max_size):
im = Image.open(im_path).convert('RGB')
im_w, im_h = im.size
im_h, im_w, rr_h, rr_w = cal_new_size_v2(im_h, im_w, min_size, max_size)
im = np.array(im)
if rr_h != 1.0 or rr_w != 1.0:
im = cv2.resize(np.array(im), (im_w, im_h), cv2.INTER_CUBIC)
return Image.fromarray(im)
def main(input_dataset_path, output_dataset_path, min_size=384, max_size=1920):
ori_img_path = os.path.join(input_dataset_path, 'images')
ori_anno_path = os.path.join(input_dataset_path, 'mats')
for phase in ['train', 'val']:
sub_save_dir = os.path.join(output_dataset_path, phase)
if not os.path.exists(sub_save_dir):
os.makedirs(sub_save_dir)
with open(os.path.join(input_dataset_path, '{}.txt'.format(phase))) as f:
lines = f.readlines()
for i in lines:
i = i.strip().split(' ')[0]
im_path = os.path.join(ori_img_path, i + '.jpg')
mat_path = os.path.join(ori_anno_path, i + '.mat')
name = os.path.basename(im_path)
im_save_path = os.path.join(sub_save_dir, name)
print(name)
# The Gaussian smoothed density map is just for visualization. It's not used in training.
im, points, density_map = generate_data(im_path, mat_path, min_size, max_size)
im.save(im_save_path)
gd_save_path = im_save_path.replace('jpg', 'npy')
np.save(gd_save_path, points)
dm_save_path = im_save_path.replace('.jpg', '_densitymap.npy')
np.save(dm_save_path, density_map)
for phase in ['test']:
sub_save_dir = os.path.join(output_dataset_path, phase)
if not os.path.exists(sub_save_dir):
os.makedirs(sub_save_dir)
with open(os.path.join(input_dataset_path, '{}.txt'.format(phase))) as f:
lines = f.readlines()
for i in lines:
i = i.strip().split(' ')[0]
im_path = os.path.join(ori_img_path, i + '.jpg')
name = os.path.basename(im_path)
im_save_path = os.path.join(sub_save_dir, name)
print(name)
im = generate_image(im_path, min_size, max_size)
im.save(im_save_path)4.运行preprocess_dataset.py
直接命令台或者终端运行preprocess_dataset.py文件即可,处理时间比较长耐心等待

5.最终结果
最终得到train,val,test三个文件夹。最好刚刚上一步骤的处理的输入和输出不要放在一个文件夹,容易混淆。

train中内容

val中内容

test中内容