opencv-python——通过cv2.distanceTransform()函数将距离转换成热力图
此转换一般可用于视觉、SLAM中的避障部分,将可以行使的区域二值化,然后再通过distanceTransform()函数实现对目标区域从距离中心到外部的梯度,再将其转换成可视化的灰度图和热力图即可。
原理解析
(1)目标图像二值化
我们首先通过HSV阈值调节器提取出目标物体的HSV阈值,然后通过cv2.inRange函数提取出机器人可通过区域的阈值范围,得到二维平面的二值化图:
inRange_hsv = cv2.inRange(hsv, color_dist['gray']['Lower'], color_dist['gray']['Upper'])

(2)高斯滤波去除噪点
可以看出图像中阈值调节后依然会有很多噪声点,所以滤波处理一下:
gaussian_hsv = cv2.GaussianBlur(inRange_hsv, (3, 3), 1)

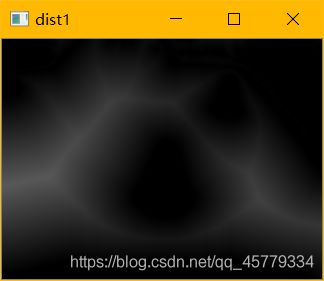
(3)将二值化图转换成距离灰度图
距离变换函数cv2.distanceTransform()的计算结果反映了各个像素与背景(值为 0 的像素点)的距离关系。通常情况下:
dist = cv2.distanceTransform(src=gaussian_hsv, distanceType=cv2.DIST_L2, maskSize=5)

在经过处理后,需要用cv2.convertScaleAbs()函数将其转回原来的uint8形式,否则将无法显示图像,而只是一副灰色的窗口。
dist1 = cv2.convertScaleAbs(dist)
dist = cv2.convertScaleAbs(src[, dst[, alpha[, beta]]])- 其中可选参数
alpha是伸缩系数, beta是加到结果上的一个值,- 结果
dist返回uint8类型的图片
- 其中可选参数
再将uint8类型的图片归一化处理:
dist2 = cv2.normalize(dist, None, 255,0, cv2.NORM_MINMAX, cv2.CV_8UC1)

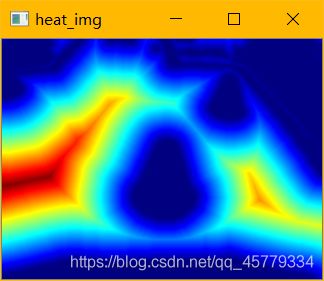
(4)将距离灰度图转换成距离热力图
通过cv2.applyColorMap()函数,我们可以将灰度图转换成红色-蓝色的热力图,当值为255时,为红色,当值为0时,为蓝色。
heat_img = cv2.applyColorMap(dist2, cv2.COLORMAP_JET)
然后取一下RoI区域的最大值以及其坐标:
costmap_roi = dist2[119:210,:] #划定ROI区域,需要实际选取大小 现在表示选取 119-210行的位置 需要自己调整
min_value,max_value,minloc,maxloc = cv2.minMaxLoc(costmap_roi) #找最大的点
print(min_value,max_value,minloc,maxloc)
输出:
0.0 255.0 (151, 0) (0, 28)
我们将值最大的点绘制在图中看一下效果:
cv2.circle(heat_img2, (maxloc), 1, (0,255,0), -1)
可以看出它很好的找到了RoI区域距离障碍物最远的点。

代码实现
import cv2
import numpy as np
import matplotlib.pyplot as plt
color_dist = {'gray': {'Lower': np.array([0,0,46]), 'Upper': np.array([180,43,220])},
'red': {'Lower': np.array([0, 0, 0]), 'Upper': np.array([255, 93, 255])},
'blue': {'Lower': np.array([100, 80, 46]), 'Upper': np.array([124, 255, 255])},
'yellow': {'Lower': np.array([26, 43, 46]), 'Upper': np.array([34, 255, 255])},
}
# img = cv2.imread("test_pictures/red_car.jpg")
img = cv2.imread("test_pictures/62.jpg")
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
inRange_hsv = cv2.inRange(hsv, color_dist['gray']['Lower'], color_dist['gray']['Upper'])
gaussian_hsv = cv2.GaussianBlur(inRange_hsv, (3, 3), 1) # 高斯滤波,去除小的噪声
dist = cv2.distanceTransform(src=gaussian_hsv, distanceType=cv2.DIST_L2, maskSize=5)
dist1 = cv2.convertScaleAbs(dist)
dist2 = cv2.normalize(dist, None, 255,0, cv2.NORM_MINMAX, cv2.CV_8UC1)
heat_img = cv2.applyColorMap(dist2, cv2.COLORMAP_JET)
costmap_roi = dist2[119:210,:] #划定ROI区域,需要实际选取大小 现在表示选取 0-179行的位置 需要自己调整
heat_img2 = cv2.applyColorMap(costmap_roi, cv2.COLORMAP_JET)
min_value,max_value,minloc,maxloc = cv2.minMaxLoc(costmap_roi) #找最大的点
print(min_value,max_value,minloc,maxloc)
cv2.circle(heat_img2, (maxloc), 2, (0,255,0), -1)
cv2.imshow("img", img)
cv2.imshow("dist", dist)
cv2.imshow("dist1", dist1)
cv2.imshow("dist2", dist2)
cv2.imshow("heat_img", heat_img)
cv2.waitKey()