自动驾驶横向控制 LQR 算法推导及仿真学习笔记
目录
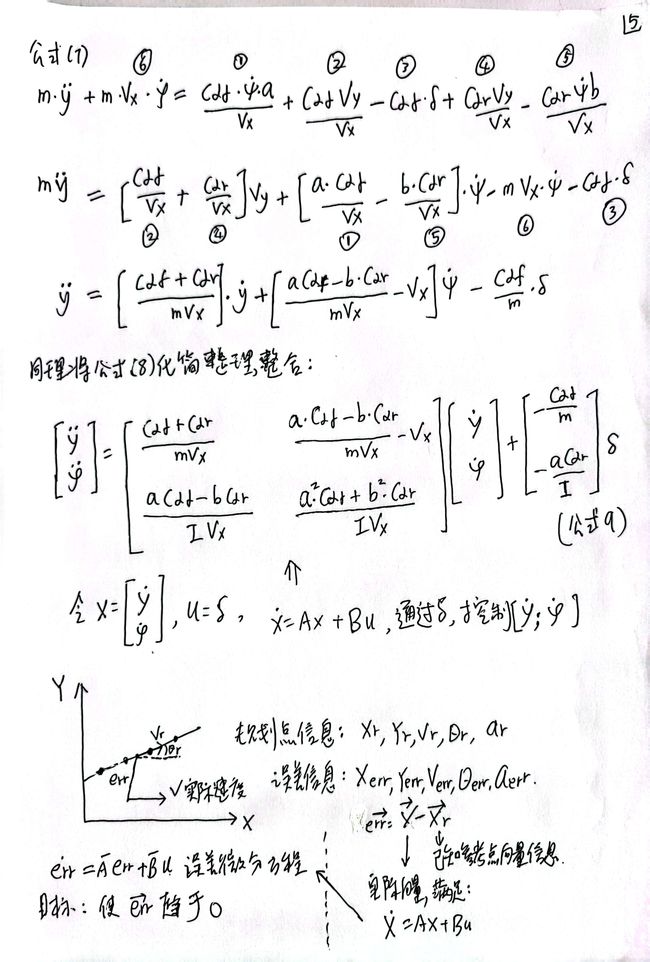
1、车辆动力学模型
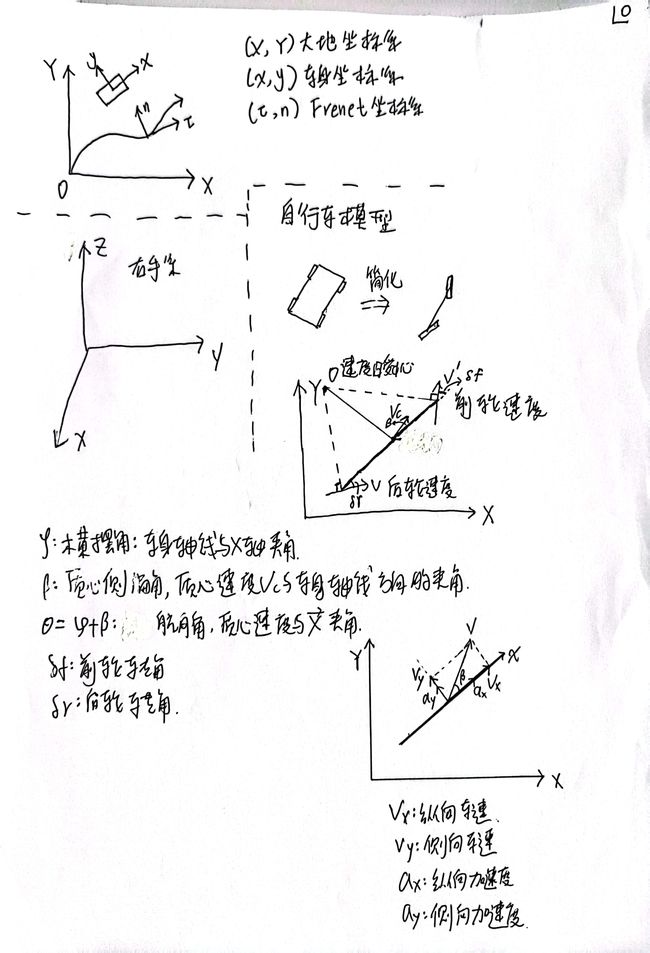
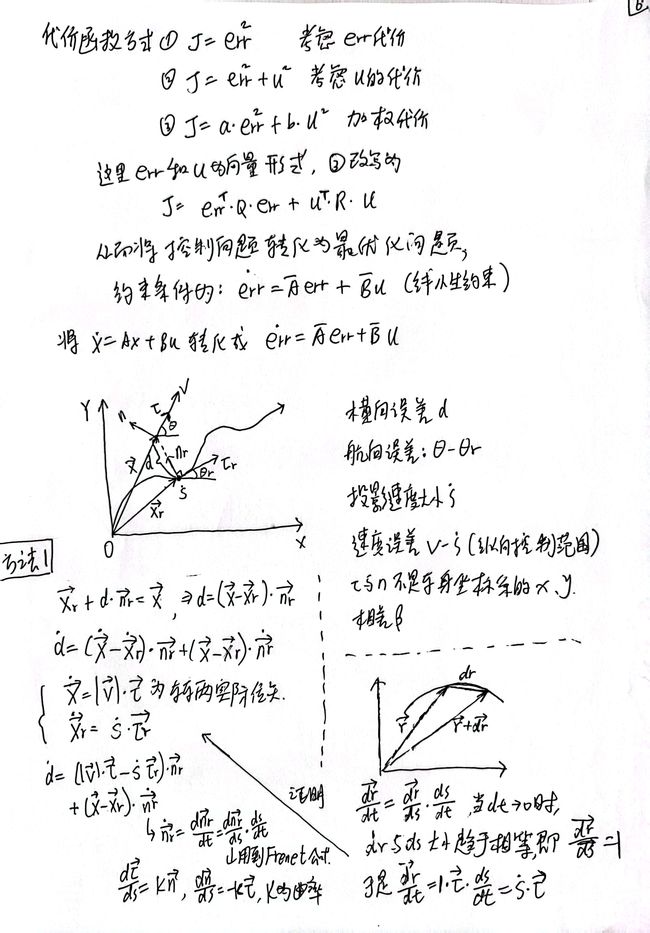
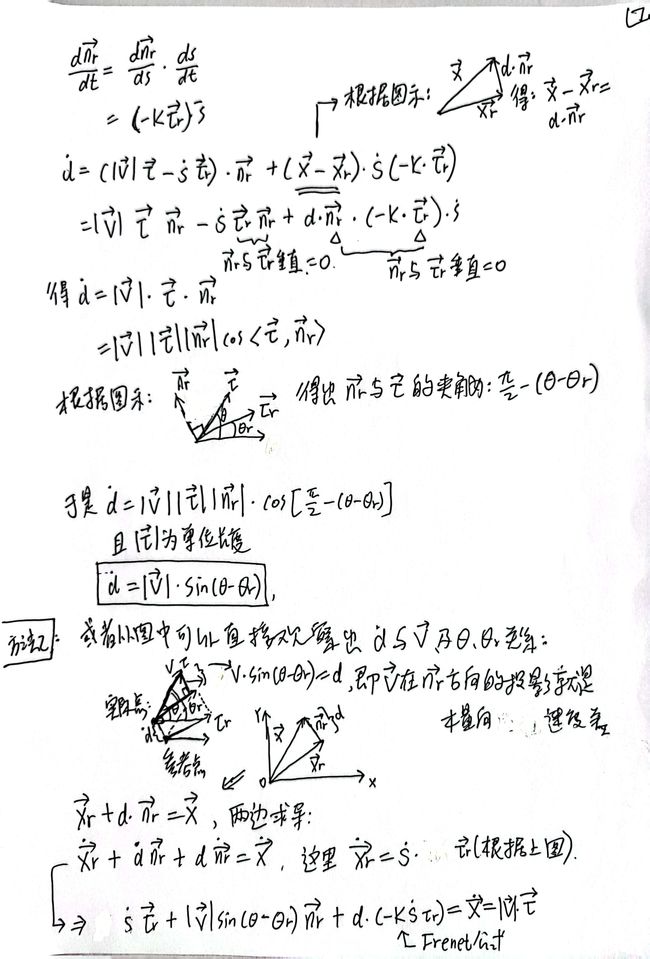
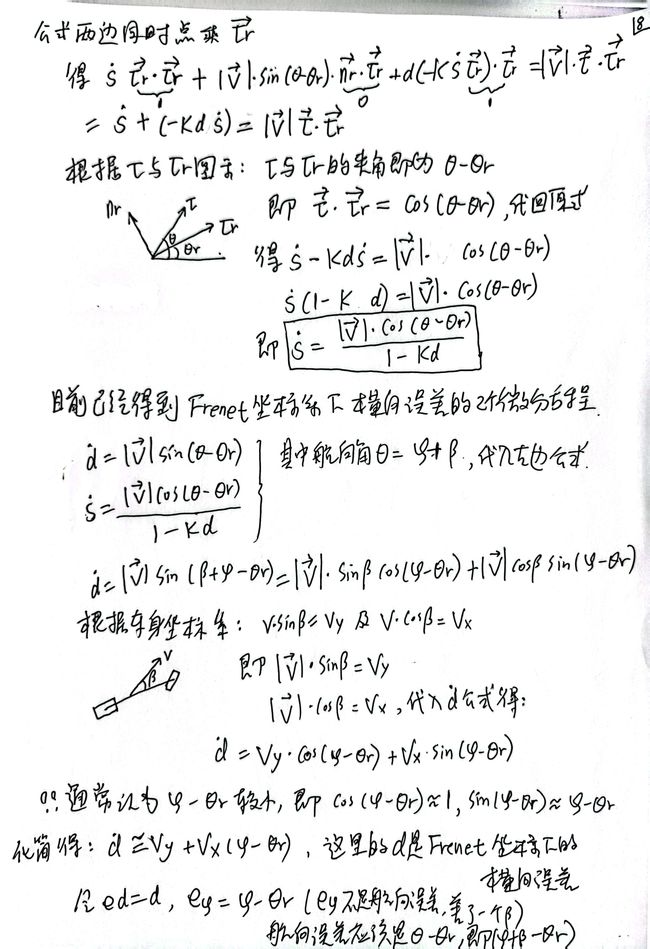
1.1 Frenet 坐标系
1.2 横向误差模型
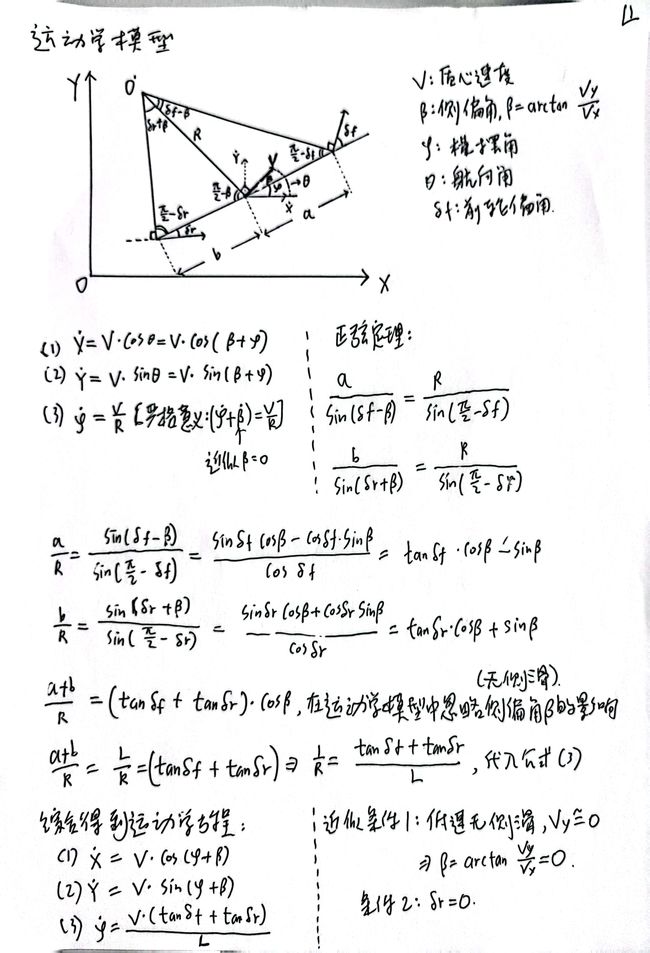
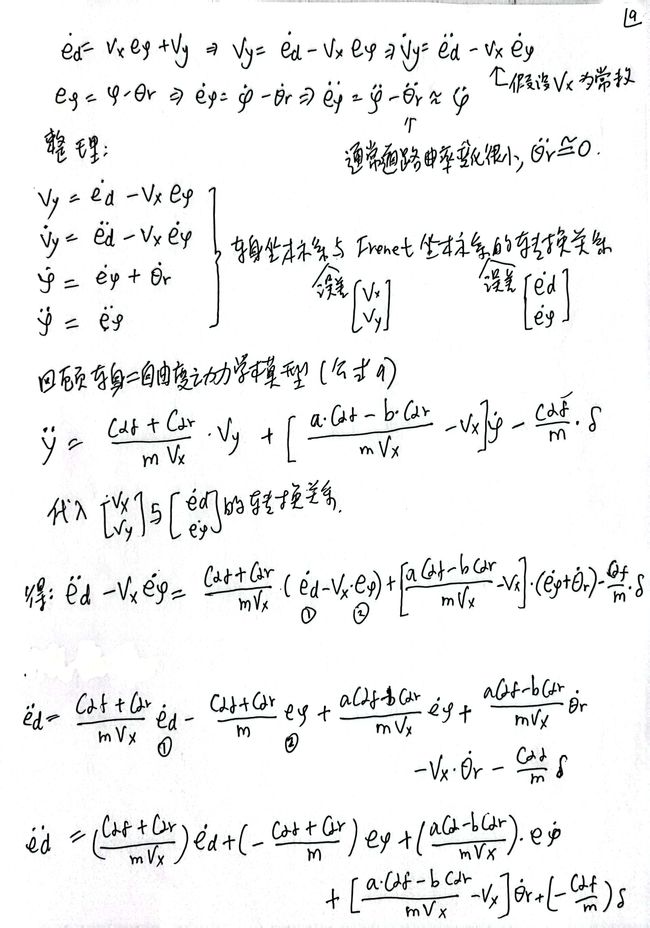
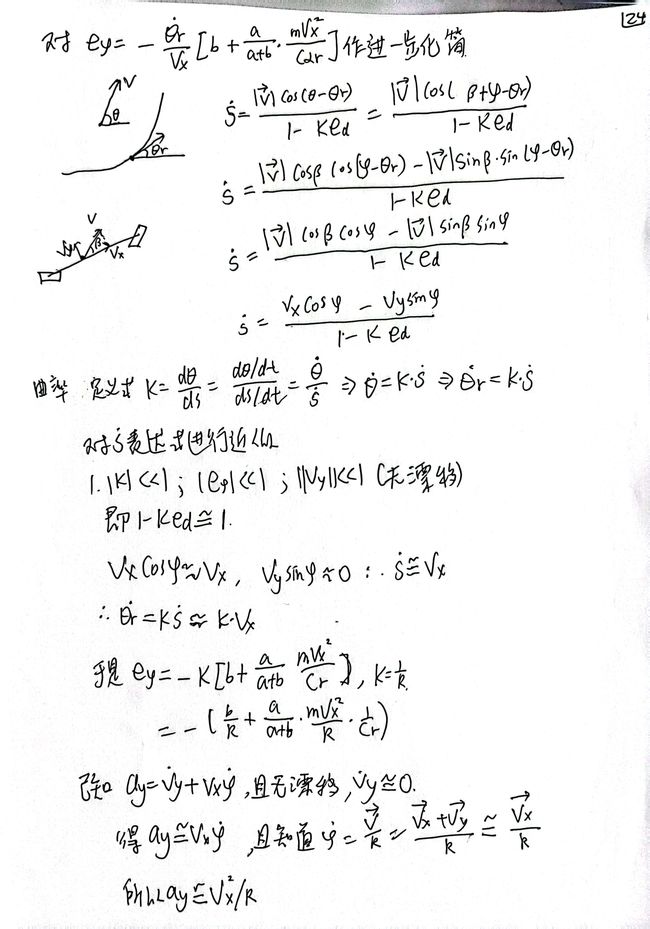
1.2.1 运动学模型
1.2.2 自行车模型
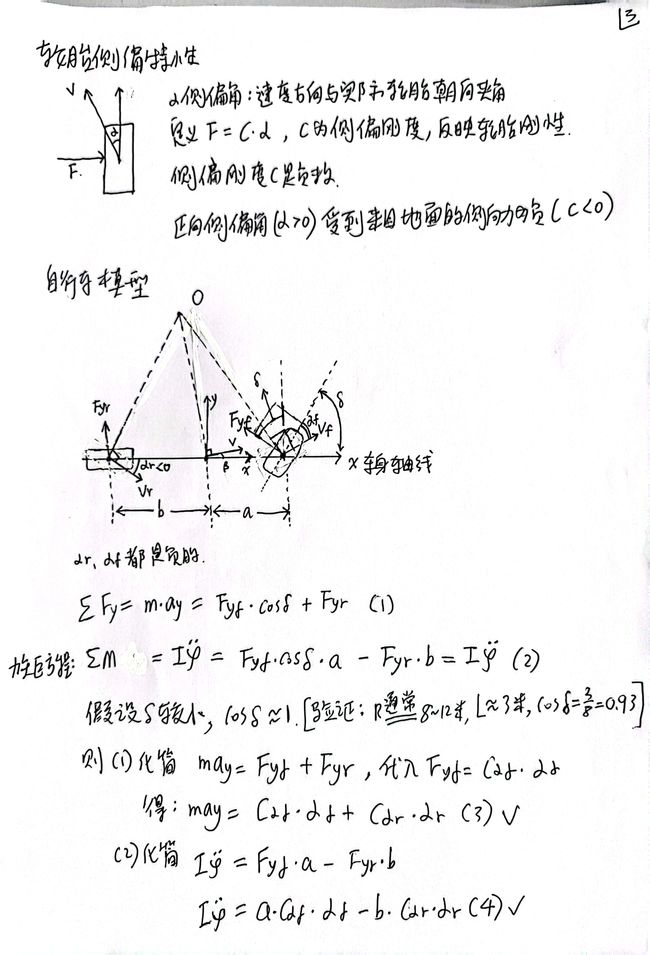
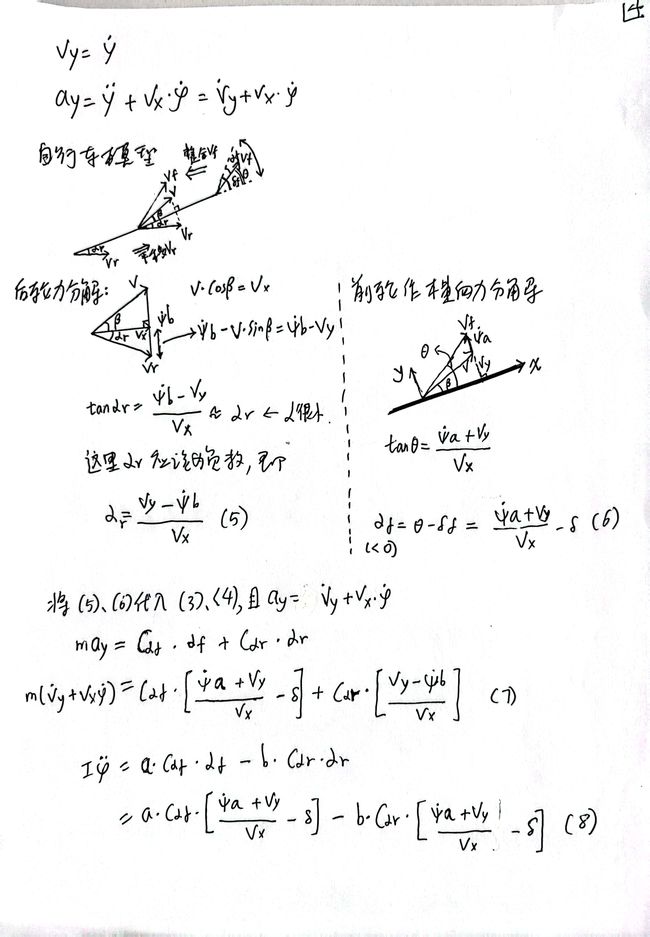
1.2.3 轮胎侧偏特性
2、LQR 及前馈控制算法
2.1 Frenet 坐标系下的连续 LQR
2.2 离散 LQR
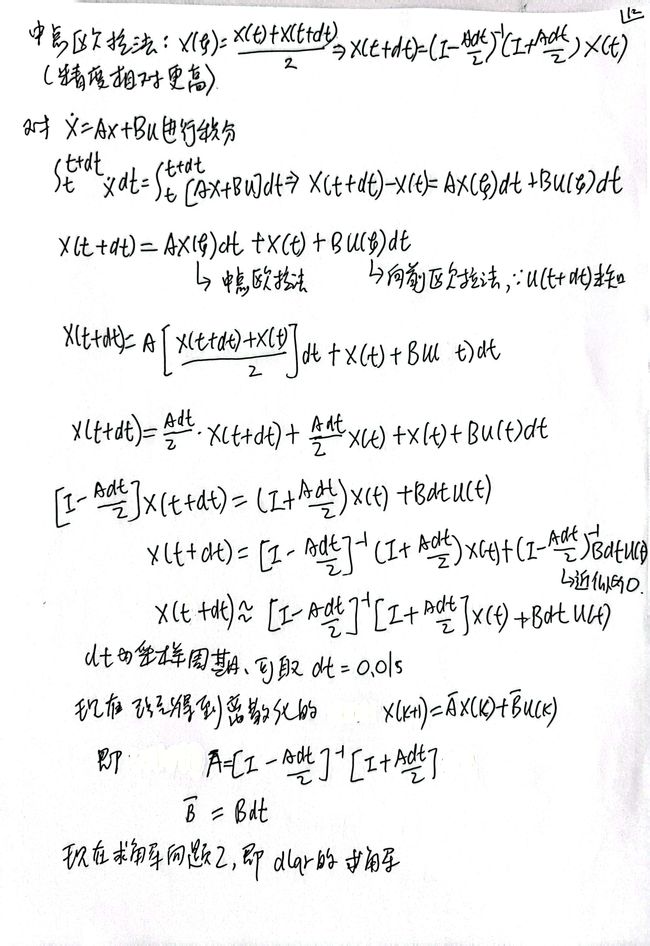
2.2.1 前向欧拉法、中点欧拉法离散化
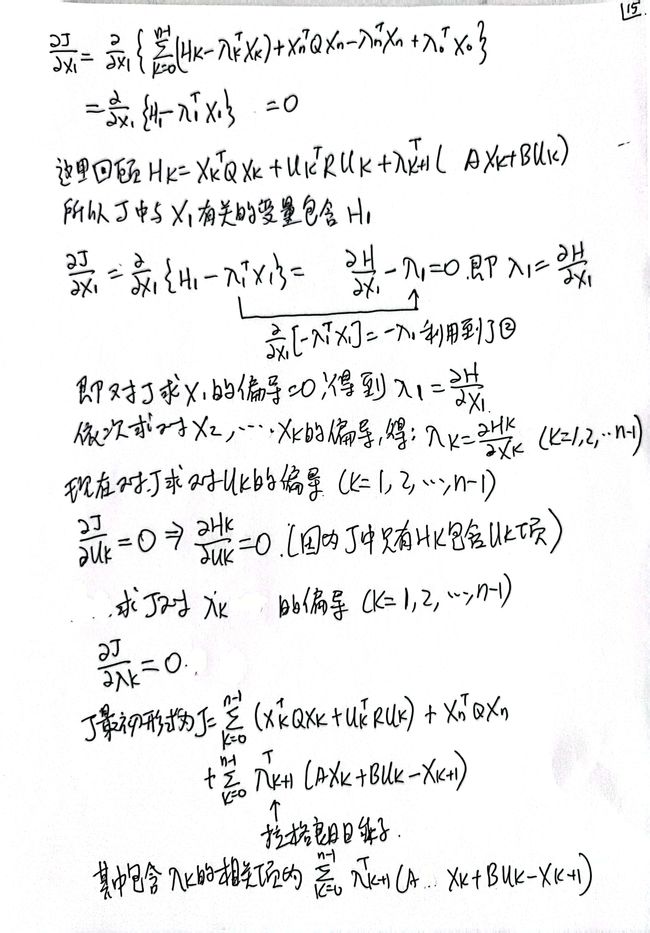
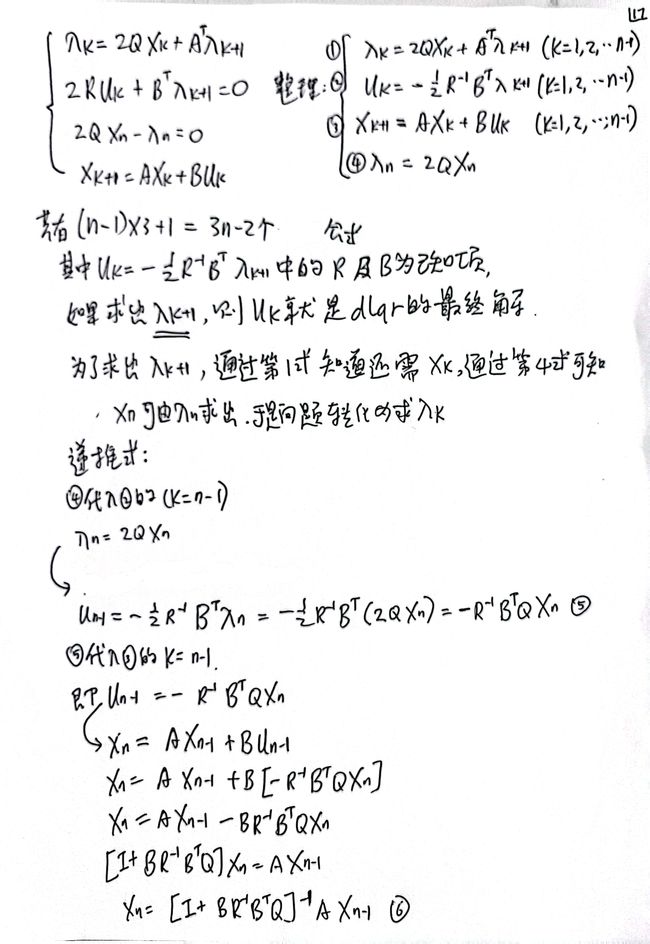
2.2.2 拉格朗日乘子法
2.2.3 对 x、u、λ 求偏导
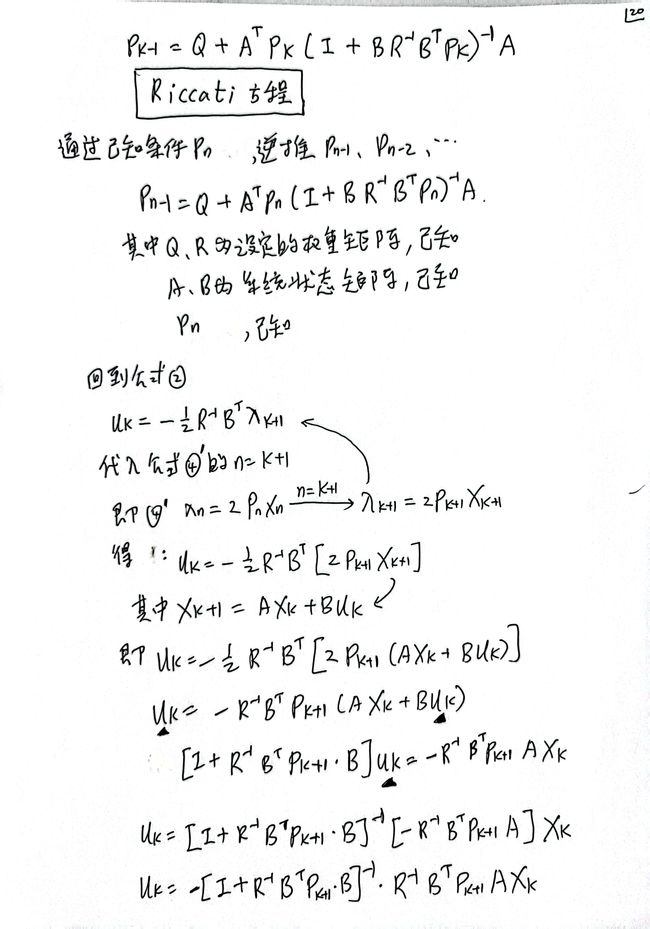
2.2.4 递推得到 Riccati 方程
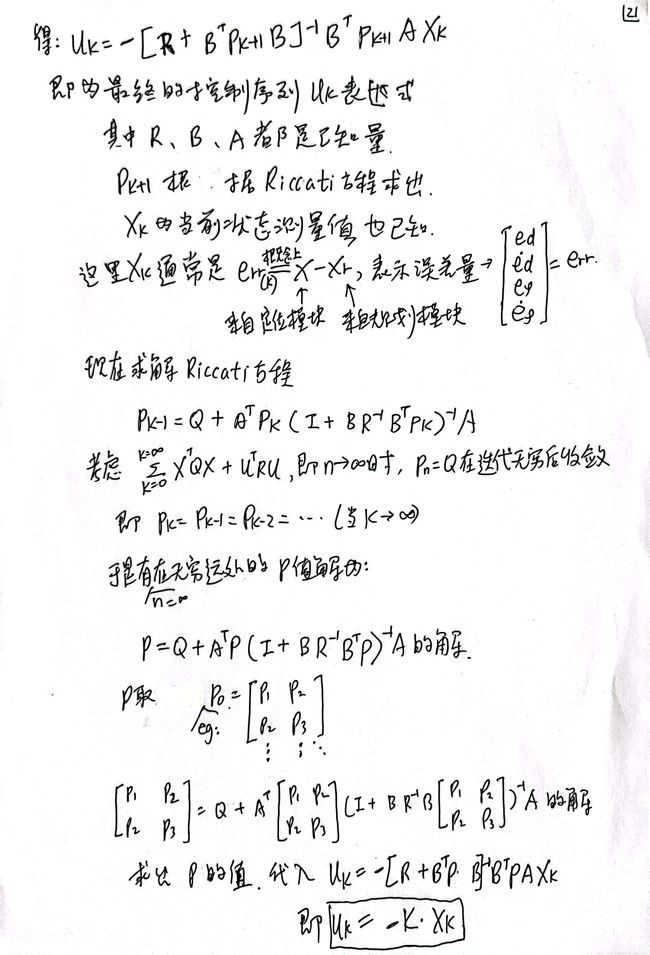
2.2.5 Riccati 方程求解
2.3 控制序列 uk 整合
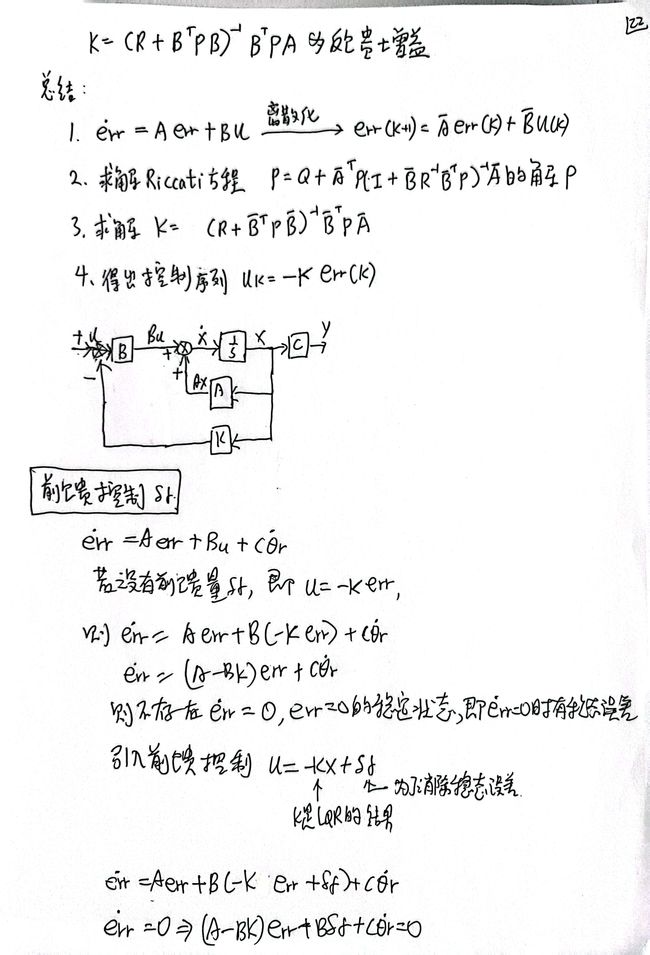
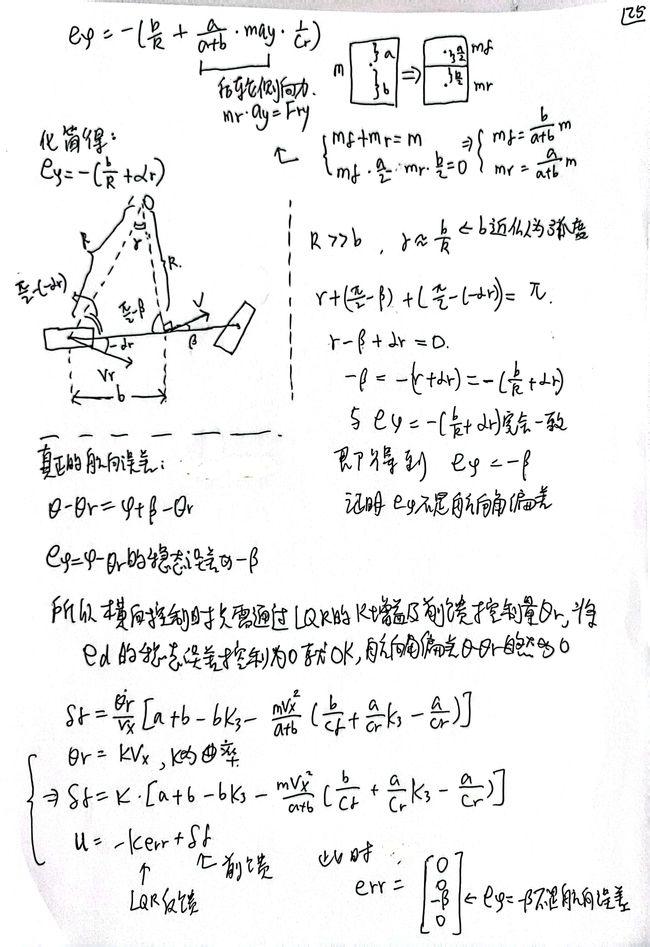
2.3.1 前馈控制量 δf
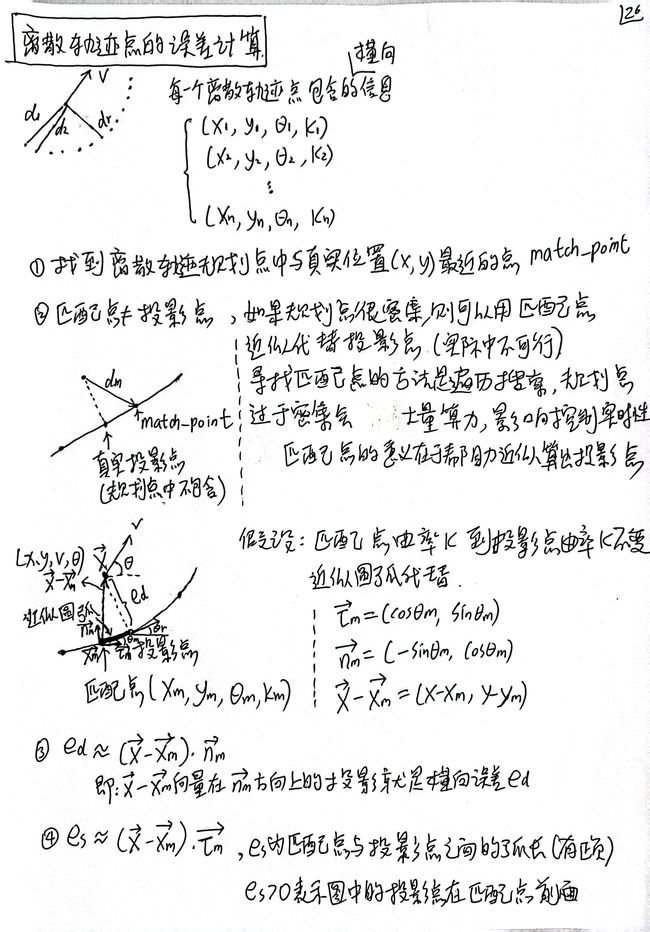
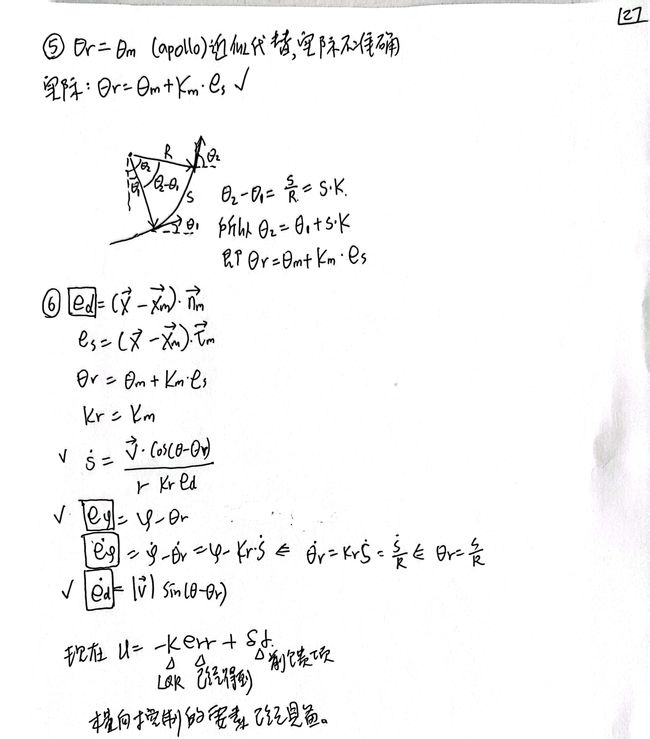
2.3.2 当前位置与规划路径点间的误差量 err
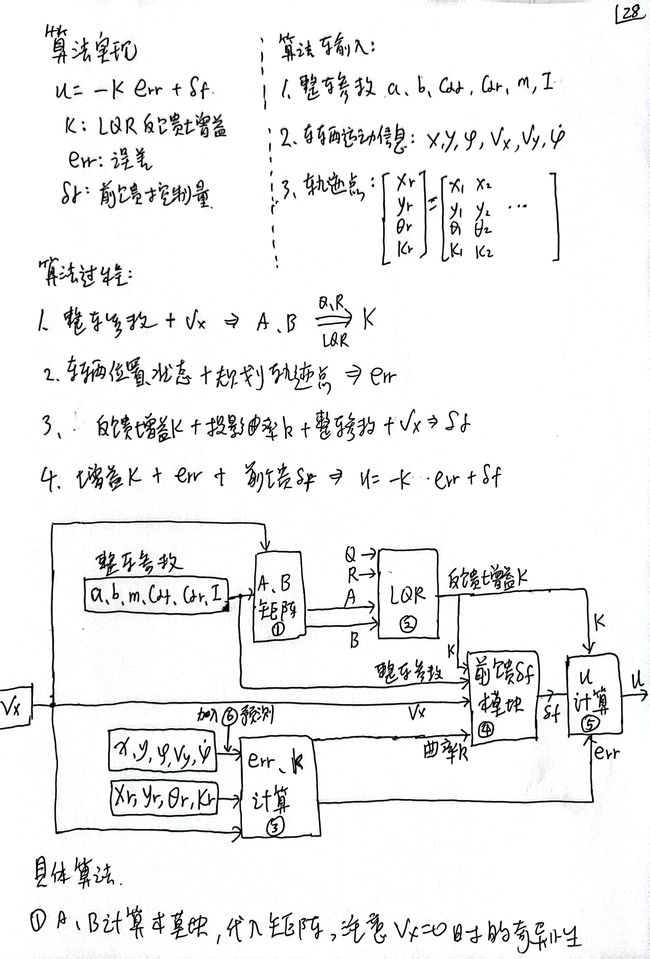
2.4 算法过程总结
3、MATLAB + Carsim 仿真
3.1 Carsim 配置
3.1.1 车辆参数配置
3.1.2 IO 通道
3.1.3 路况设置
3.1.4 规划路径点
3.2 Simulink 搭建
3.2.1 生成轨迹规划点
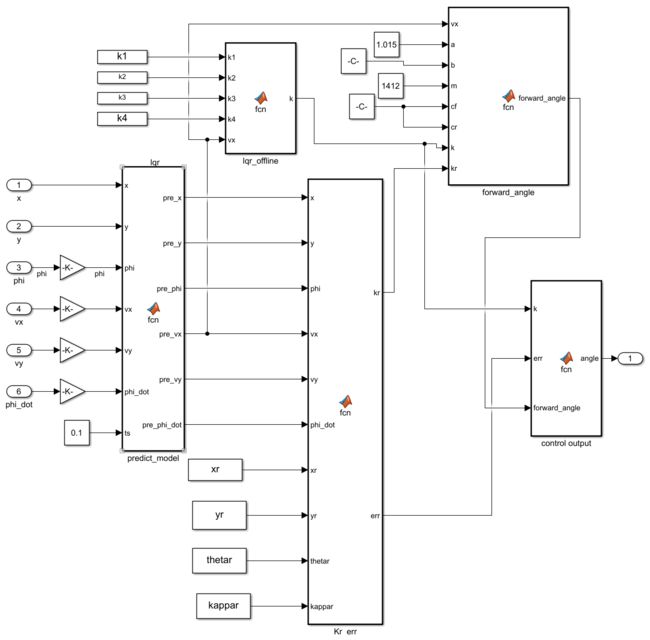
3.2.2 预瞄路径点 preview 计算模块
3.2.3 误差 err、投影点曲率 k 计算模块
3.2.4 离线计算 LQR 反馈增益 K
3.2.5 dlqr 离线查表
3.2.6 前馈控制量 δf 计算模块
3.2.7 控制序列 uk 整合
3.3 控制效果与优化
3.3.1 Carsim 动画效果
3.3.2 控制量抖动优化
3.3.2 控制量突变优化
1、车辆动力学模型
1.1 Frenet 坐标系
1.2 横向误差模型
1.2.1 运动学模型
1.2.2 自行车模型

1.2.3 轮胎侧偏特性
2、LQR 及前馈控制算法
2.1 Frenet 坐标系下的连续 LQR

2.2 离散 LQR

2.2.1 前向欧拉法、中点欧拉法离散化
2.2.2 拉格朗日乘子法

2.2.3 对 x、u、λ 求偏导

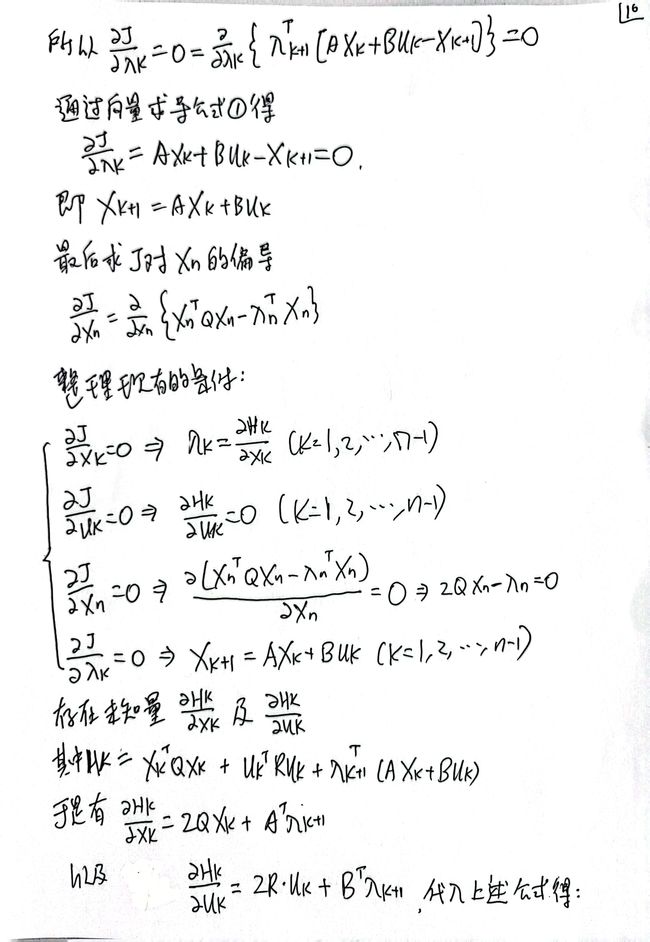
2.2.4 递推得到 Riccati 方程


2.2.5 Riccati 方程求解
2.3 控制序列 uk 整合
2.3.1 前馈控制量 δf

2.3.2 当前位置与规划路径点间的误差量 err
2.4 算法过程总结
3、MATLAB + Carsim 仿真
carsim 版本为 2019,MATLAB 版本为 2018a
3.1 Carsim 配置
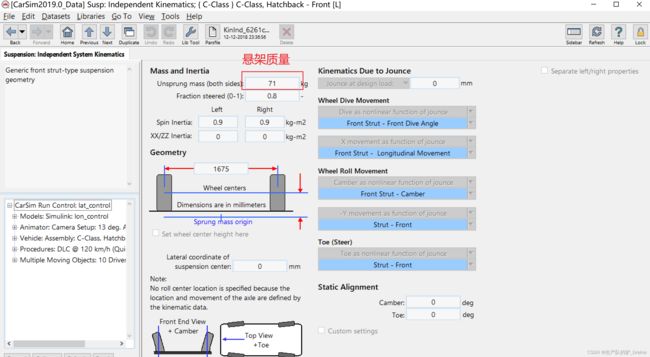
3.1.1 车辆参数配置
选择 C 级车型
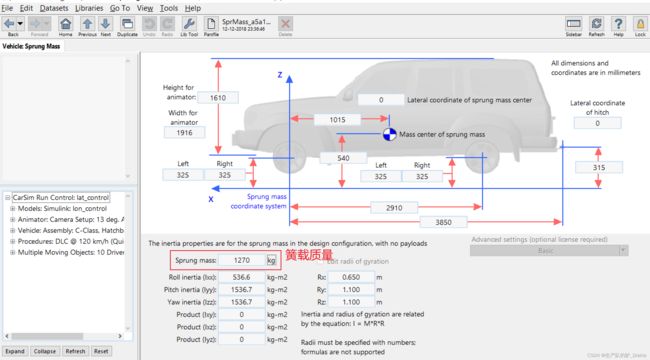
查看悬架质量
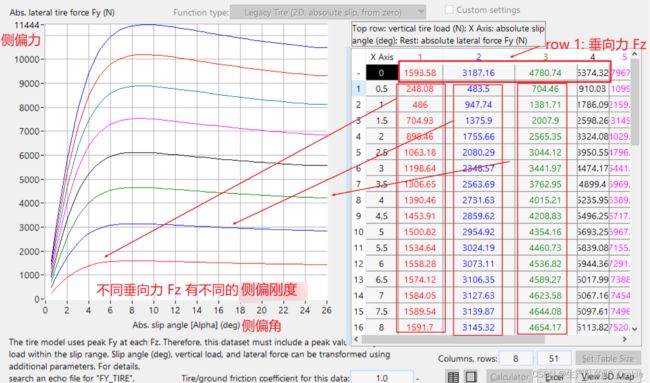
理解轮胎侧偏刚度曲线
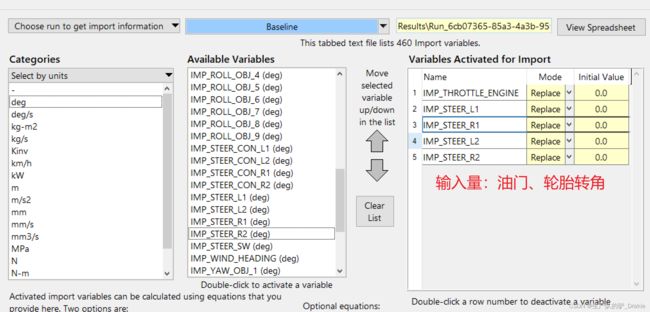
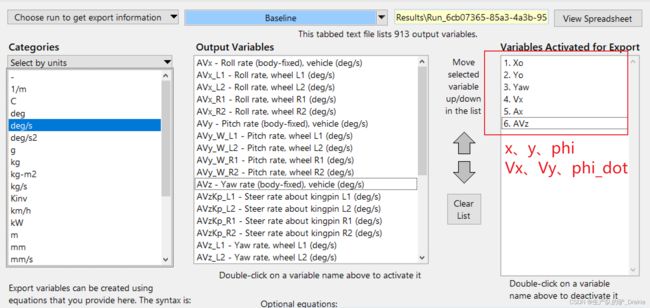
3.1.2 IO 通道
输入通道设置
输出通道设置
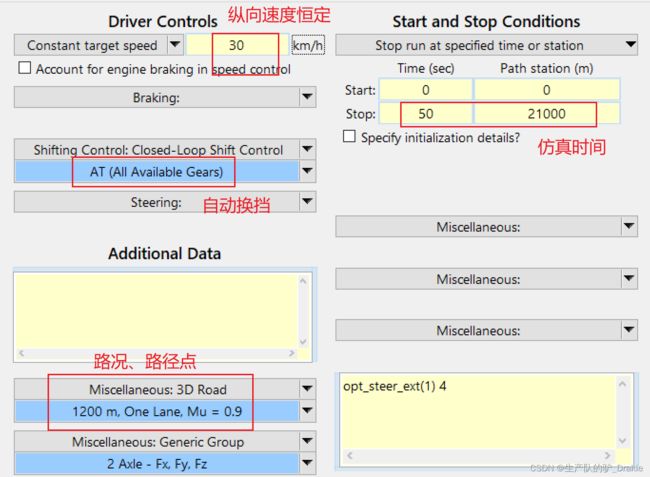
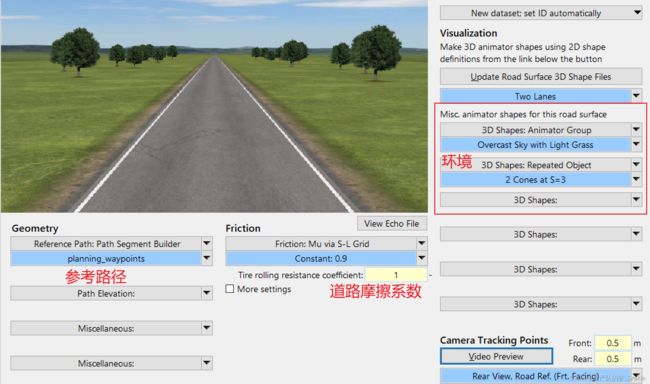
3.1.3 路况设置
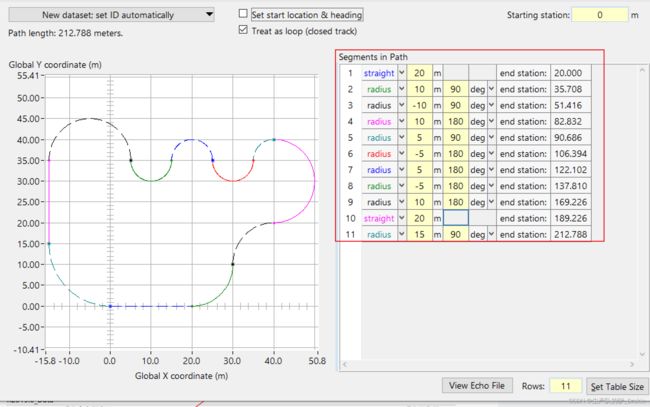
3.1.4 规划路径点
设置路径
3.2 Simulink 搭建
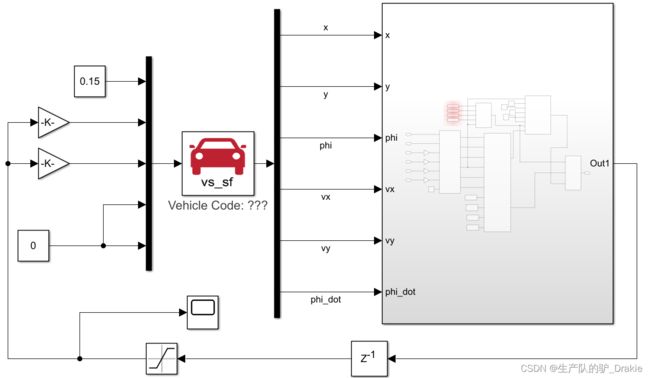
子模块预览
3.2.1 生成轨迹规划点
count=50;
[x1,y1,theta1,kr1]=straight([0,0],[20,0],0,count);
[x2,y2,theta2,kr2]=arc([20,0],[30,10],0,pi/2,count);
[x3,y3,theta3,kr3]=arc([30,10],[40,20],pi/2,0,count);
[x4,y4,theta4,kr4]=arc([40,20],[40,40],0,pi,count);
[x5,y5,theta5,kr5]=arc([40,40],[35,35],pi,3*pi/2,count);
[x6,y6,theta6,kr6]=arc([35,35],[25,35],3*pi/2,pi/2,count);
[x7,y7,theta7,kr7]=arc([25,35],[15,35],pi/2,3*pi/2,count);
[x8,y8,theta8,kr8]=arc([15,35],[5,35],3*pi/2,pi/2,count);
[x9,y9,theta9,kr9]=arc([5,35],[-15,35],pi/2,3*pi/2,count);
[x10,y10,theta10,kr10]=straight([-15,35],[-15,15],3*pi/2,count);
[x11,y11,theta11,kr11]=arc([-15,15],[0,0],3*pi/2,2*pi,count);
xr=[x1,x2,x3,x4,x5,x6,x7,x8,x9,x10,x11];
yr=[y1,y2,y3,y4,y5,y6,y7,y8,y9,y10,y11];
thetar=[theta1,theta2,theta3,theta4,theta5,theta6,theta7,theta8,theta9,theta10,theta11];
kappar=[kr1,kr2,kr3,kr4,kr5,kr6,kr7,kr8,kr9,kr10,kr11];
scatter(xr,yr);
function[xr,yr,thetar,kr]=straight(init_coord,end_coord,init_angle,count)
delta_x=(end_coord(1)-init_coord(1))/(count-1);
delta_y=(end_coord(2)-init_coord(2))/(count-1);
for i=1:count
xr(i)=init_coord(1)+delta_x*i;
yr(i)=init_coord(2)+delta_y*i;
thetar(i)=init_angle;
kr(i)=0;
end
end
function[xr,yr,thetar,kr]=arc(init_coord,end_coord,init_angle,end_angle,count)
L=sqrt((init_coord(1)-end_coord(1))^2+(init_coord(2)-end_coord(2))^2);
R=L/sqrt(2*(1-cos(end_angle-init_angle)));
delta_angle=(end_angle-init_angle)/(count-1) ;
for i=1:count
if delta_angle>0
xr(i)=init_coord(1)-R*sin(init_angle)+R*sin(init_angle+delta_angle*(i-1));
yr(i)=init_coord(2)+R*cos(init_angle)-R*cos(init_angle+delta_angle*(i-1));
thetar(i)=init_angle+delta_angle*i;
kr(i)=1/R;
else
xr(i)=init_coord(1)+R*sin(init_angle)-R*sin(init_angle+delta_angle*(i-1));
yr(i)=init_coord(2)-R*cos(init_angle)+R*cos(init_angle+delta_angle*(i-1));
thetar(i)=init_angle+delta_angle*i;
kr(i)=-1/R;
end
end
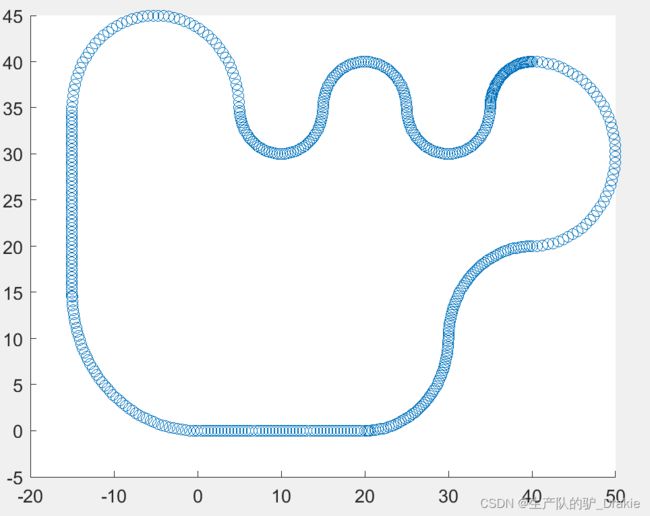
end执行 m 文件,生成轨迹图像
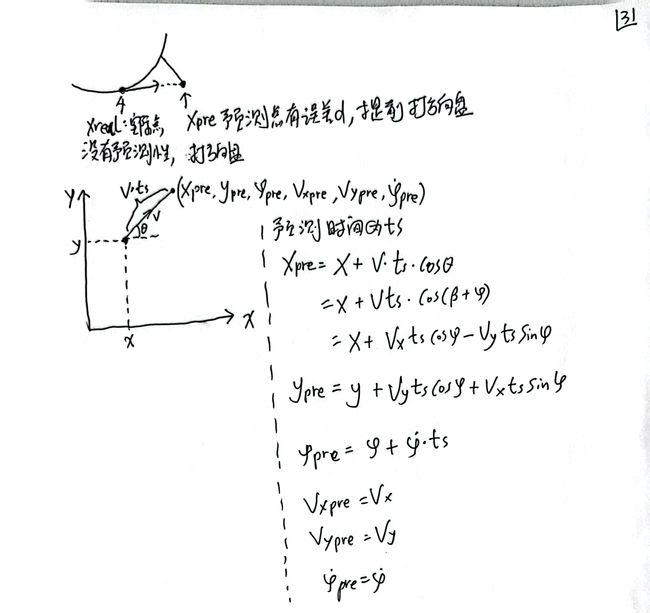
3.2.2 预瞄路径点 preview 计算模块
% 预测模块
function [pre_x, pre_y, pre_phi, pre_vx, pre_vy, pre_phi_dot] = fcn(x, y, phi, vx, vy, phi_dot, ts)
pre_x = x + vx * ts * cos(phi) - vy * ts * sin(phi);
pre_y = y + vy * ts * cos(phi) + vx * ts * sin(phi);
pre_phi = phi + phi_dot * ts;
pre_vx = vx;
pre_vy = vy;
pre_phi_dot = phi_dot;
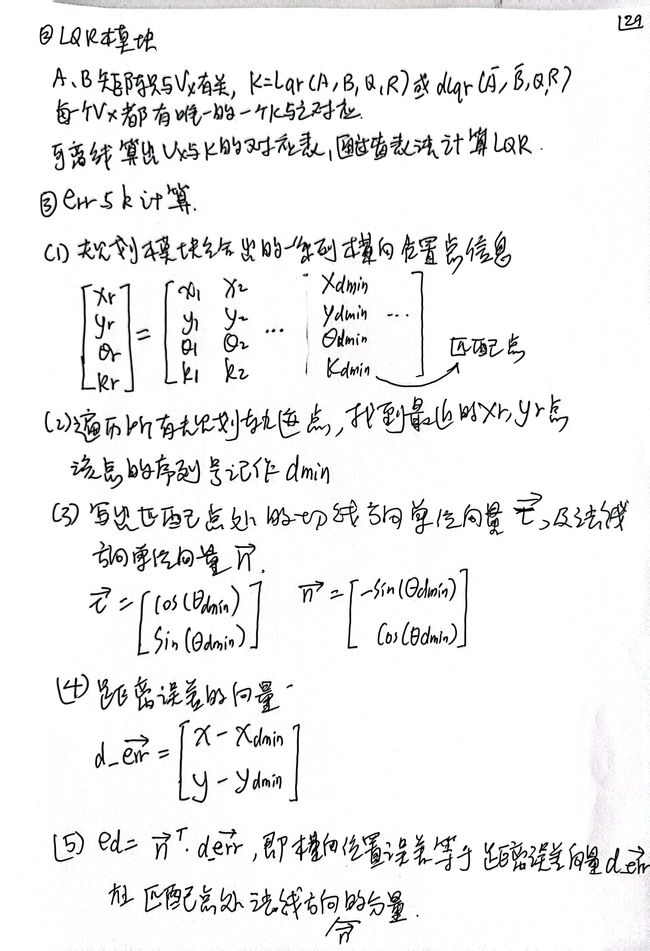
end3.2.3 误差 err、投影点曲率 k 计算模块
function [kr,err] = fcn(x,y,phi,vx,vy,phi_dot,xr,yr,thetar,kappar)
n=length(xr); % 规划点的长度
d_min = (x-xr(1))^2 + (y-yr(1))^2; % 找出最短距离
min = 1; % 最短点的序号设为 1
for i=1:n
d = (x-xr(i))^2 + (y-yr(i))^2;
if d < d_min
d_min = d;
min = i;
end
end
dmin = min;
tor = [cos(thetar(dmin)); sin(thetar(dmin))];
nor = [-sin(thetar(dmin)); cos(thetar(dmin))];
d_err = [x - xr(dmin); y - yr(dmin)];
ed = nor' * d_err;
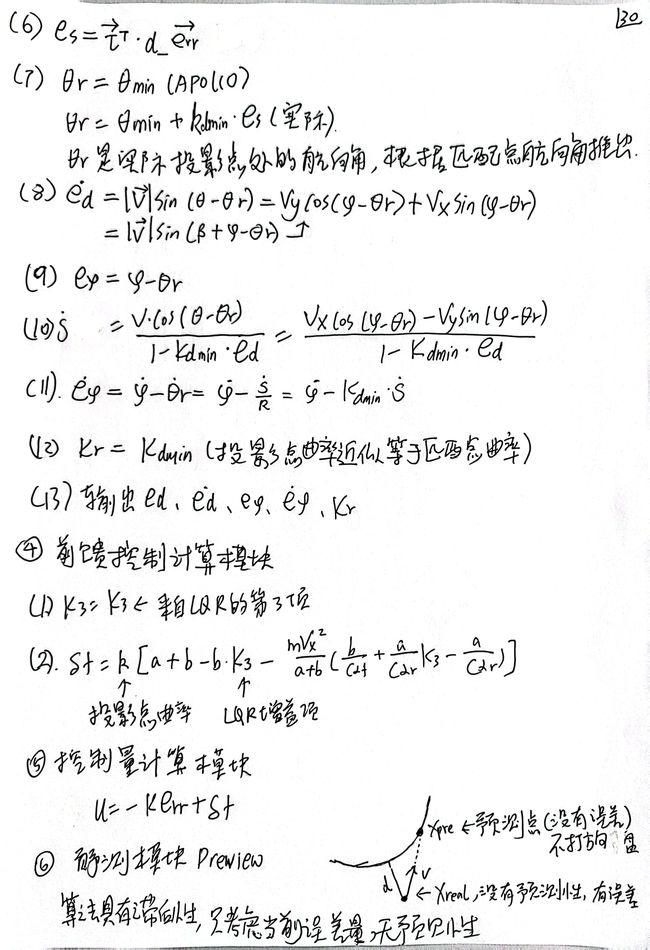
es = tor' * d_err;
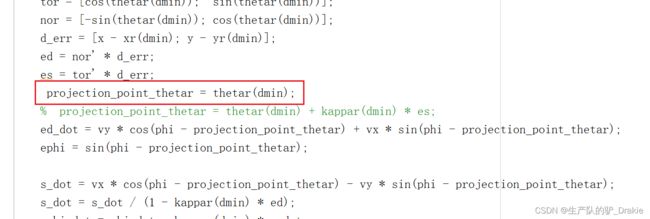
% projection_point_thetar = thetar(dmin);
projection_point_thetar = thetar(dmin) + kappar(dmin) * es;
ed_dot = vy * cos(phi - projection_point_thetar) + vx * sin(phi - projection_point_thetar);
ephi = sin(phi - projection_point_thetar);
s_dot = vx * cos(phi - projection_point_thetar) - vy * sin(phi - projection_point_thetar);
s_dot = s_dot / (1 - kappar(dmin) * ed);
ephi_dot = phi_dot - kappar(dmin) * s_dot;
kr = kappar(dmin);
err = [ed; ed_dot; ephi; ephi_dot];
end3.2.4 离线计算 LQR 反馈增益 K
这里需要先执行一次 m 文件,生成 K 值
cf = -110000;
cr = cf;
m = 1412;
Iz = 1537.7;
a = 1.015;
b = 2.910 - a;
k = zeros(5000, 4);
for i=1:5000
vx = 0.01 + 0.01 * i;
A = [0, 1, 0, 0;
0, (cf+cr)/(m*vx), -(cf+cr)/m, (a*cf-b*cr)/(m*vx);
0,0,0,1;
0,(a*cf - b*cr)/(Iz*vx),-(a*cf-b*cr)/Iz,(a*a*cf+b*b*cr)/(Iz*vx)];
B = [0;
-cf/m;
0;
-a*cf/Iz];
Q = eye(4);
R = 100;
k(i,:) = lqr(A,B,Q,R);
end
k1 = k(:,1)';
k2 = k(:,2)';
k3 = k(:,3)';
k4 = k(:,4)';
3.2.5 dlqr 离线查表
function k = fcn(k1,k2,k3,k4,vx)
if abs(vx) < 0.01
k = [0,0,0,0];
else
index = round(vx / 0.01);
k = [k1(index), k2(index), k3(index), k4(index)];
end
end3.2.6 前馈控制量 δf 计算模块
function forward_angle = fcn(vx, a, b, m, cf, cr, k, kr)
forward_angle = kr*(a+b-b*k(3)-(m*vx*vx/(a+b))*((b/cf)+(a/cr)*k(3)-(a/cr)));
end3.2.7 控制序列 uk 整合
function angle = fcn(k, err, forward_angle)
angle = -k * err + forward_angle;
end3.3 控制效果与优化
3.3.1 Carsim 动画效果
鸟瞰视角

3.3.2 控制量抖动优化
控制量波形受到饱和约束,前轮转角变化范围为 ±1 rad
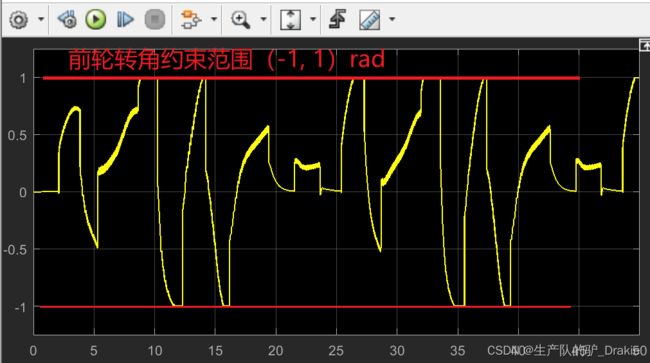
问题描述:控制量抖动过大,即方向盘不平稳
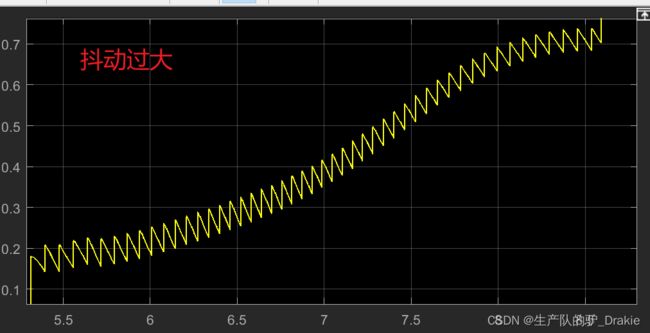
原因:在 err 和 曲率计算模块中,投影点的航向角用匹配点的航向角近似代替,导致计算结果反复不定,修正后重新执行。
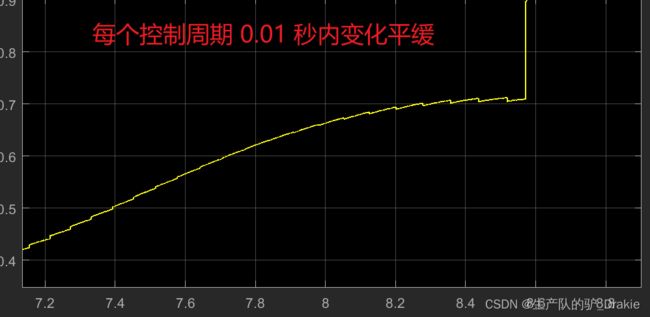
改善结果:控制量 u 抖动明显减少

控制量在每个周期内的变化率较为平缓
3.3.2 控制量突变优化
问题描述:在道路曲率变化处的控制量存在突变现象
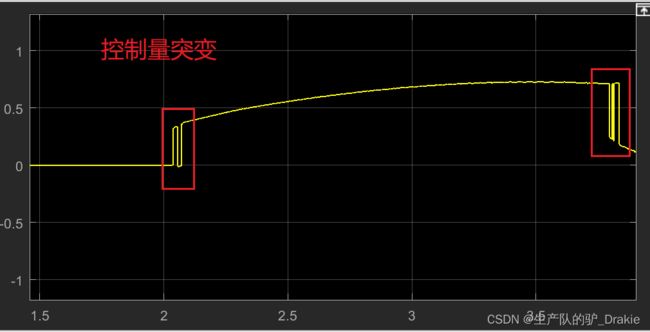
原因:规划路径的曲率不连续,路径点本身曲率就存在突变,没有过渡曲率

解决方法 1:在曲率突变处进行插值,保证连接处曲率的一阶导数与二阶导数都连续,在实际路况中大多数的公路设计都是连续曲率。
解决方法 2:增大 LQR 控制器中 R 的值,即增大u的惩罚权重,使u变化减缓。