4.OpenCV之透视转换
Q1:引用传参VS指针传参的区别?
A1:关键点:区分指针和引用的区别。
| 指针 | 引用 |
|---|---|
| 变量,独立,可变,可空,替身,无类型检查 | 别名,依赖,不变,本体,有类型检查 |
C/C++引用与指针的联系
一、仿射变换和透视变换详解
二、透视变换
(一)重要函数
1. findHomography函数
计算多个二维点对之间的最优单映射变换矩阵 H(3行x3列) ,使用最小均方误差或者RANSAC方法。
函数功能:找到两个平面之间的变换矩阵。
Mat cv::findHomography ( InputArray srcPoints,
InputArray dstPoints,
int method = 0,
double ransacReprojThreshold = 3,
OutputArray mask = noArray(),
const int maxIters = 2000,
const double confidence = 0.995
)
2. warpPerspective函数
void warpPerspective(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())
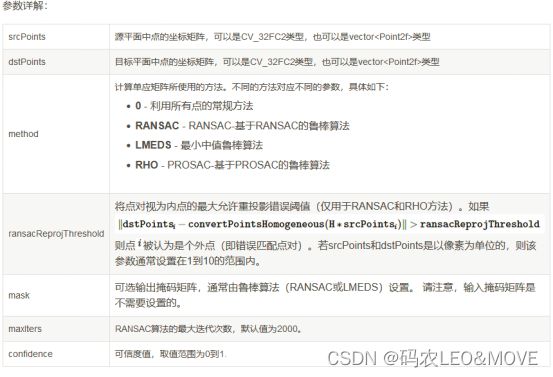
参数说明:
src – 输入图像
dst – 大小为dsize且类型与src相同的输出图像
M – 3×3变换矩阵
dsize – 输出图像的大小
图中红点即为固定顶点,在变换先后固定顶点的像素值不变,图像整体则根据变换规则进行变换。同理,透视变换是图像基于4个固定顶点的变换,如图所示:
#include (二)具体实现
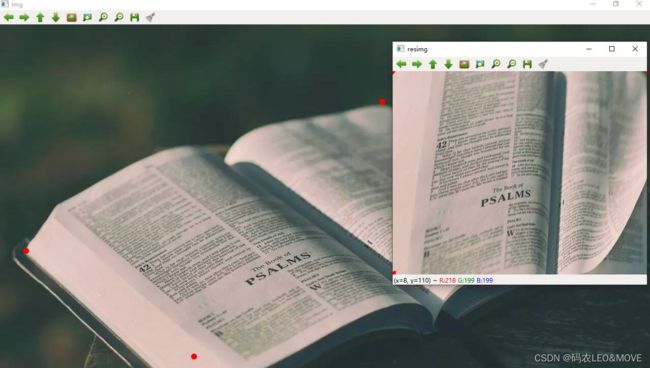
透视变换结合图像处理。将一张背景图片中的某块区域替换为另一张图片透视转换后的效果图。
1. 效果展示
2. 核心代码
#include