自动驾驶入门(二):自动驾驶分级和定义
1. 自动驾驶分级
标准SAE,美国汽车工程学会
L0:无自动化,完全由任内驾驶者控制汽车;
L1:驾驶支持,通过驾驶环境对方向盘和加速减速中的一项操作提供支持,其余操作由人类驾驶员操作;
L2:部分自动化,通过驾驶环境对方向盘和加减速中的多项操作提供支持,其余由人类驾驶员操作;
L3:有条件的自动化,由自动驾驶系统提供所有的驾驶操作,根据系统要求,人类驾驶员提供适当的应答,车内需要配备驾驶员;
L4: 高度自动化,由自动驾驶系统完成所有驾驶操作,根据系统要求,人类驾驶员不一定要提供所有应答,车内可无驾驶员,限定道路和环境条件,例如:封闭园区,高速公路,码头港口;
L5:完全自动化,由自动驾驶系统完成所有操作,可能情况下,人类接管,车内可不用配备驾驶员,不限定道路和场景。
Note: 现在量产项目,乘用车基本以L2为主,商用车部分已完成L4.
2. 自动驾驶模块
以百度apollo给出的模块介绍为例,我们仅研究软件模块:高精地图,定位,感知,规划,控制,人机交互。
高精地图+定位:告诉自动驾驶系统,车在哪儿?哪个省哪个市,哪个区,哪条路,路的第几个车道线上,具体的定位信息,定位精度不断向厘米级别靠近(不太确定是否已经达到)
感知模块:本系列博客将要精讲内容,此处不展开;
规划模块:分为全局规划和局部规划,全局规划,可以看作高德地图帮用户搜索最优路径,局部规划可以看作用户开车碰到各种交通参与者后做的临时决策,左转超车,还是跟车等;
控制模块:整车控制模块,根据规划模块提出的车辆决策,控制模块负责实现,如规划决定左侧超车,控制模块需要参与方向盘控制,加速控制;
人机交互:TBD。
3. L2智能驾驶分级
参考 采埃孚冯工总结
3.1 纵向控制:
AEB:Automatic Emergency Braking
AEB功能若细分,可细分为
- DW: Distance warning,距离预警,当系统判断当前车速下,距离过近时,提示驾驶员;
- FCW: Forward Collission Warning,前方碰撞预警,当系统判断当前车速下,可能出现碰撞情况,发出预警提醒驾驶员;
- ABP: Automatic Braking Pre-fill,自动刹车提前预备,刹车踏板有一段空行程,系统判断段可能碰撞时,会提前踩到空行程截至位置;例如:打篮球投篮,相当于把投篮姿势做好;
- AEB: Automatic Emergency Braking,自动紧急刹车,当系统判断可能碰撞,驾驶员没有反应时,系统自动刹车;
- EBA: Emergency Braking Assist ,紧急刹车协助系统,当系统判断驾驶员已经参与刹车,但是刹车制动力不够,导致可能发生碰撞时,系统辅助加大制动力矩,实现刹车避险;
ACC: Adaptive Cruise Control
ACC按照功能分细分:
- Cruise:自动车速控制,如高速路,自动保持一个车速或增加到某一车速;
- Approach:当障碍物从被探测到至其在感知模块的整个生命周期,决定了主车是否跟随;
- Cut in:主车正在跟车,突然有车辆插入,系统需要重新判断选择跟车对象;
- Cut out: 主车跟车的对象突然偏离本车到,系统需要重新判断选择跟车对象;
- ACC:自动跟车
ACC在进行选择跟车目标时,需要从障碍物和车道得到相关信息:
- 障碍物:需要知道障碍物的种类,探测距离,以及障碍物的目标跟踪;
- 道路:ELM: Estimated Lane Marking,评估车道信息;OTLA: Object to Lane Association:判断障碍物与车道线的关系,就是判断这个车在我主车道上影响因子;Road Boundary: 道路边界。
3.2 横向功能 LSS Lateral Support System
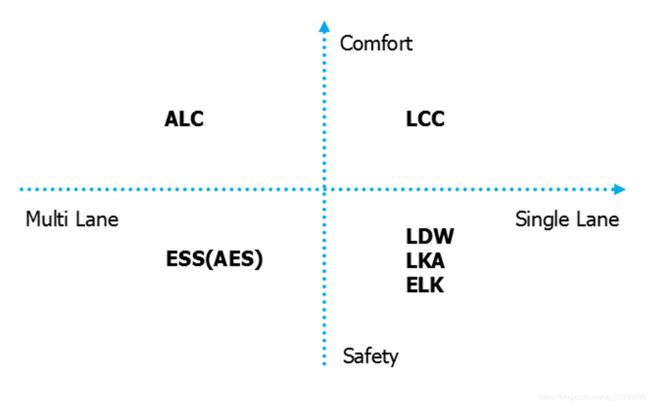
坐标轴将横向功能分为四个象限,横坐标轴,从左到右,从多车道到单车道;纵坐标从下到上分为安全性和舒适性;
ESS: Emergency Steering System,紧急转向系统,作用于安全+多车道模块;
ALC:Auto Lane Change,自动变道,作用于舒适性+多车道模块;
LCC:Lane Central Control,车道居中控制,作用于舒适性+单车道模块;
LDW:Lane Departure Warning,车道偏离预警,作用于安全+单车道模块;
LKA:Lane Keep Assist,车道保持协助系统,作用于安全+单车道模块;
ELK:Emergency Lane Keep,紧急车道保持,作用于安全+单车道模块;
3.3 组合控制
HWA:LCC+ACC+ALC
TJA: ACC+LCC
AVP:自动泊车
APA:自动泊车
Notes: 具体分类和介绍TBD
4. 自动驾驶
TBD
ACC:
链接:
SAE文档 -> TBD
https://github.com/ApolloAuto/apollo
https://zhuanlan.zhihu.com/p/371501616