3D数学 AABB(轴对齐矩形边界框)
3D数学 AABB轴对齐矩形边界框
1. 几何图元
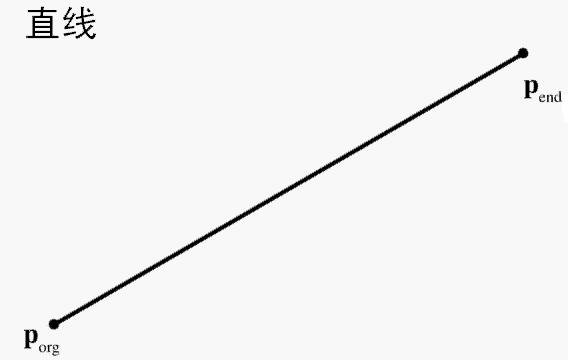
直线:由两个向量定义直线的方向
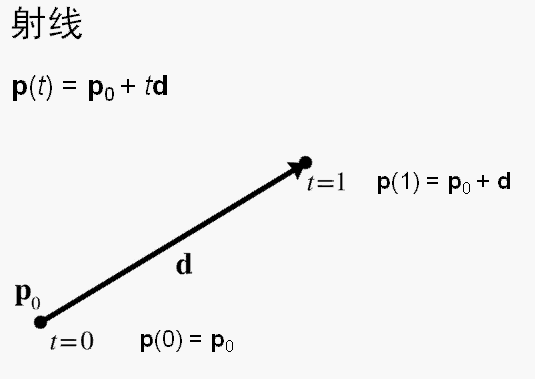
射线:由两个向量定义直线的方向,其中一个向量定义射线的起点
球和圆
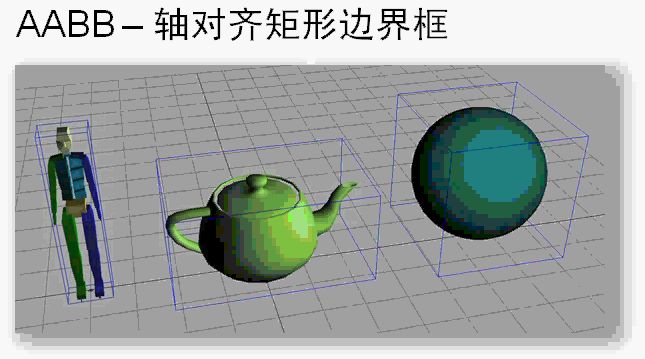
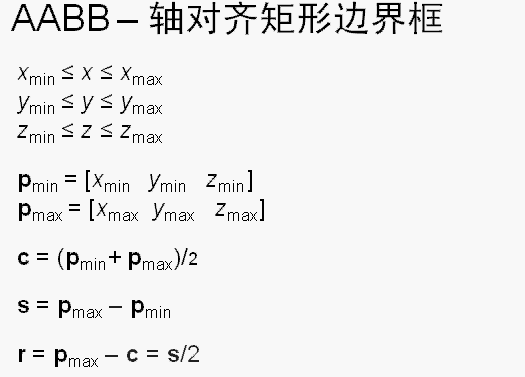
矩形边界框(AABB)

2. AABB(轴对齐矩形边界框)C++实现
/////////////////////////////////////////////////////////////////////////////
//
// 3D Math Primer for Games and Graphics Development
//
// AABB3.h - Declarations for class AABB3
//
// Visit gamemath.com for the latest version of this file.
//
// For more details, see AABB3.cpp
//
/////////////////////////////////////////////////////////////////////////////
#ifndef __AABB3_H_INCLUDED__
#define __AABB3_H_INCLUDED__
#ifndef __VECTOR3_H_INCLUDED__
#include "Vector3.h"
#endif
class Matrix4x3;
//---------------------------------------------------------------------------
// class AABB3
//
// Implement a 3D axially aligned bounding box
class AABB3 {
public:
// Public data
// Min and max values. Pretty simple.
Vector3 min;
Vector3 max;
// Query for dimentions
Vector3 size() const { return max - min; }
float xSize() { return max.x - min.x; }
float ySize() { return max.y - min.y; }
float zSize() { return max.z - min.z; }
Vector3 center() const { return (min + max) * .5f; }
// Fetch one of the eight corner points. See the
// .cpp for numbering conventions
Vector3 corner(int i) const;
// Box operations
// "Empty" the box, by setting the values to really
// large/small numbers
void empty();
// Add a point to the box
void add(const Vector3 &p);
// Add an AABB to the box
void add(const AABB3 &box);
// Transform the box and compute the new AABB
void setToTransformedBox(const AABB3 &box, const Matrix4x3 &m);
// Containment/intersection tests
// Return true if the box is enmpty
bool isEmpty() const;
// Return true if the box contains a point
bool contains(const Vector3 &p) const;
// Return the closest point on this box to another point
Vector3 closestPointTo(const Vector3 &p) const;
// Return true if we intersect a sphere
bool intersectsSphere(const Vector3 ¢er, float radius) const;
// Parametric intersection with a ray. Returns >1 if no intresection
float rayIntersect(const Vector3 &rayOrg, const Vector3 &rayDelta,
Vector3 *returnNormal = 0) const;
// Classify box as being on one side or the other of a plane
int classifyPlane(const Vector3 &n, float d) const;
// Dynamic intersection with plane
float intersectPlane(const Vector3 &n, float planeD,
const Vector3 &dir) const;
};
// Check if two AABBs intersect, and return true if so. Optionally return
// the AABB of their intersection if an intersection is detected
bool intersectAABBs(const AABB3 &box1, const AABB3 &box2,
AABB3 *boxIntersect = 0);
// Return parametric point in time when a moving AABB collides
// with a stationary AABB. Returns > 1 if no intersection
float intersectMovingAABB(
const AABB3 &stationaryBox,
const AABB3 &movingBox,
const Vector3 &d
);
/////////////////////////////////////////////////////////////////////////////
#endif // #ifndef __AABB3_H_INCLUDED__
/
//
// 3D Math Primer for Games and Graphics Development
//
// AABB3.cpp - Implementation for class AABB3
//
// Visit gamemath.com for the latest version of this file.
//
// For more details, see Chapter 12
//
/
#include