吴恩达《深度学习专项》笔记+代码实战(六):改进梯度下降算法(mini-batch, Momentum, Adam)
学习提示
一直以来,我们都用梯度下降法作为神经网络的优化算法。但是,这个优化算法还有很多的改进空间。这周,我们将学习一些更高级的优化技术,希望能够从各个方面改进普通的梯度下降算法。
我们要学习的改进技术有三大项:分批梯度下降、高级更新方法、学习率衰减。这三项是平行的,可以同时使用。
分批梯度下降是从数据集的角度改进梯度下降。我们没必要等遍历完了整个数据集后再进行参数更新,而是可以遍历完一小批数据后就进行更新。
高级更新方法指不使用参数的梯度值,而是使用一些和梯度相关的中间结果来更新参数。通过使用这些更高级的优化算法,我们能够令参数的更新更加平滑,更加容易收敛到最优值。这些高级的算法包括gradient descent with momentum, RMSProp, Adam。其中Adam是前两种算法的结合版,这是目前最流行的优化器之一。
学习率衰减指的是随着训练的进行,我们可以想办法减小学习率的值,从而减少参数的震荡,令参数更快地靠近最优值。
在这周的课里,我们要更关注每种优化算法的单独、组合使用方法,以及应该在什么场合用什么算法,最后再去关注算法的实现原理。对于多数技术,“会用”一般要优先于“会写”。
课堂笔记
分批梯度下降
这项技术的英文名称取得极其糟糕。之前我们使用的方法被称为"batch gradient descent", 改进后的方法被称为"mini-batch gradient descent"。但是,这两种方法的本质区别是是否把整个数据集分成多个子集。因此,我们认为我的中文翻译“分批梯度下降”、“整批梯度下降”比原来的英文名词或者“小批量梯度下降”等中文翻译要更贴切名词本身的意思。
使用mini-batch
在之前的学习中,我们都是用整个训练集的平均梯度来更新模型参数的。而如果训练集特别大的话,遍历整个数据集要花很长时间,梯度下降的速度将十分缓慢。
其实,我们不一定要等遍历完了整个数据集再做梯度下降。相较于每次遍历完所有 m m m个训练样本再更新,我们可以遍历完一小批次(mini-batch)的样本就更新。让我们来看课件里的一个例子:

假设整个数据集大小 m = 5 , 000 , 000 m=5,000,000 m=5,000,000。我们可以把数据集划分成5000个mini-batch,其中每一个batch包含1000个数据。做梯度下降时,我们每跑完一个batch里的1000个数据,就用它们的平均梯度去更新参数,再去跑下一个batch。
这里要介绍一个新的标记。设整个数据集 X X X的形状是 ( n x , m ) ( m = 5 , 000 , 000 ) (n_x, m)(m=5,000,000) (nx,m)(m=5,000,000),则第** i i i个数据集的标记**为 X { i } X^{\lbrace i \rbrace} X{i} ,形状为 ( n x , 1000 ) (n_x, 1000) (nx,1000)。
再次总结一下标记: x ( i ) [ j ] { k } x^{(i)[j]\lbrace k\rbrace} x(i)[j]{k}中的上标分别表示和第i个样本相关、和第j层相关、和第k个批次的样本集相关。实际上这三个标记几乎不会同时出现。
使用了分批梯度下降后,算法的写法由
for i in range(m):
update parameters
变成
for i in range(m / batch_size)
for j in range(batch_size):
update parameters
。现在的梯度下降法每进行一次内层循环,就更新一次参数。我们还是把一次内层循环称为一个"step(步)“。此外,我们把一次外层循环称为一个"epoch(直译为’时代’,简称‘代’)”,因为每完成一次外层循环就意味着训练集被遍历了一次。
mini-batch 的损失函数变化趋势
使用分批梯度下降后,损失函数的变化趋势会有所不同:

如图所示,如果是使用整批梯度下降,则损失函数会一直下降。但是,使用分批梯度下降后,损失函数可能会时升时降,但总体趋势保持下降。
这种现象主要是因为之前我们计算的是整个训练集的损失函数,而现在计算的是每个mini-batch的损失函数。每个mini-batch的损失函数时高时低,可以理解为:某批数据比较简单,损失函数较低;另一批数据难度较大,损失函数较大。
选择批次大小
批次大小(batch size)对训练速度有很大的影响。
如果批次过大,甚至极端情况下batch_size=m,那么这等价于整批梯度下降。我们刚刚也学过了,如果数据集过大,整批梯度下降是很慢的。
如果批次过小,甚至小到batch_size=1(这种梯度下降法有一个特别的名字:随机梯度下降(Stochastic Gradient Descent)),那么这种计算方法又会失去向量化计算带来的加速效果。
回想一下第二周的内容:向量化计算指的是一次对多个数据做加法、乘法等运算。这种计算方式比用循环对每个数据做计算要快。
出于折中的考虑,我们一般会选用一个介于1-m之间的数作为批次大小。
如果数据集过小(m<2000),那就没必要使用分批梯度下降,直接拿整个数据集做整批梯度下降即可。
如果数据集再大一点,就可以考虑使用64, 128, 256, 512这些数作为batch_size。这几个数都是2的次幂。由于电脑的硬件容量经常和2的次幂相关,把batch_size恰好设成2的次幂往往能提速。
当然,刚刚也讲了,使用较大batch_size的一个目的是充分利用向量化计算。而向量化计算要求参与运算的数据全部在CPU/GPU内存上。如果设备的内存不够,则设过大的batch_size也没有意义。
一段数据的平均值
在课堂上,这段内容是从数学的角度切入介绍的。我认为这种介绍方式比较突兀。我将从计算机科学的角度切入,用更好理解的方式介绍“指数加权移动平均”。
背景
假设我们绘制了某年每日气温的散点图:
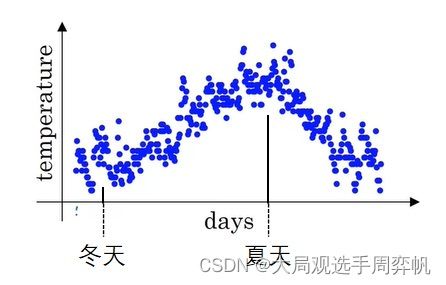
假如让你来描述全年气温的趋势,你会怎么描述呢?
作为人类,我们肯定会说:“这一年里,冬天的气温较低。随后气温逐渐升高,在夏天来到最高值。夏天过后,气温又逐渐下降,直至冬天的最低值。”
但是,要让计算机看懂天气的变化趋势,应该怎么办呢?直接拿相邻的天气的差作为趋势可不行。冬天也会出现第二天气温突然升高的情况,夏天也会出现第二天气温突然降低的情况。我们需要一个能够概括一段时间内气温情况的指标。
移动平均数
一段时间里的值,其实就是几天内多个值的总体情况。多个值的总体情况,可以用平均数表示。严谨地来说,假如这一年有365天,我们用 t t t表示这一年每天的天气,那么:
t i = { 第 i 天 的 天 气 ( 1 ≤ i ≤ 365 ) 0 ( i 取 其 他 值 ) t_i=\left\{ \begin{aligned} &第i天的天气 &(1 \leq i \leq 365) \\ &0 &(i取其他值) \end{aligned} \right. ti={第i天的天气0(1≤i≤365)(i取其他值)
我们可以定义一种叫做移动平均数(Moving Averages) 的指标,表示某天及其前几天温度的平均值。比如对于5天移动平均数 m a ma ma,其定义如下:
m a i = t i + t i − 1 + t i − 2 + t i − 3 + t i − 4 5 ( 1 ≤ i ≤ 365 ) ma_i=\frac{t_i+t_{i-1}+t_{i-2}+t_{i-3}+t_{i-4}}{5} (1 \leq i \leq 365) mai=5ti+ti−1+ti−2+ti−3+ti−4(1≤i≤365)
假如要让计算机依次输出每天的移动平均数,该怎么编写算法呢?我们来看几个移动平均数的例子:
m a 5 = ( t 5 + t 4 + t 3 + t 2 + t 1 ) / 5 m a 6 = ( t 6 + t 5 + t 4 + t 3 + t 2 ) / 5 m a 7 = ( t 7 + t 6 + t 5 + t 4 + t 3 ) / 5 \begin{aligned} ma_5=(t_5+t_4+t_3+t_2+t_1)/5 \\ ma_6=(t_6+t_5+t_4+t_3+t_2)/5 \\ ma_7=(t_7+t_6+t_5+t_4+t_3)/5 \end{aligned} ma5=(t5+t4+t3+t2+t1)/5ma6=(t6+t5+t4+t3+t2)/5ma7=(t7+t6+t5+t4+t3)/5
通过观察,我们可以发现 m a 6 = m a 5 + ( t 6 − t 1 ) / 5 ma_6=ma_5+(t_6-t_1)/5 ma6=ma5+(t6−t1)/5, m a 7 = m a 6 + ( t 7 − t 2 ) / 5 ma_7=ma_6+(t_7-t_2)/5 ma7=ma6+(t7−t2)/5。
也就是说,在算n天里的m天移动平均数(我们刚刚计算的是5天移动平均数)时,我们不用在n次的外层循环里再写一个m次的循环,只需要根据前一天的移动平均数,减一个值加一个值即可。这种依次输出移动平均数的算法如下:
input temperature[0:n]
input m
def get_temperature(i):
return temperature[i] if i >= 0 and i < n else 0
ma = 0
for i in range(n):
ma += (get_temperature(i) - get_temperature(i - m)) / m
ma_i = ma
output ma_i
这种求移动平均数的方法确实很高效。但是,我们上面这个算法是基于所有温度值一次性给出的情况。假如我们正在算今年每天温度的移动平均数,每天的温度是一天一天给出的,而不是一次性给出的,上面的算法应该怎么修改呢?让我们来看修改后的算法:
input m
temp_i_day_ago = zeros((m))
def update_temperature(t):
for i in range(m - 1):
temp_i_day_ago[i+1] = temp_i_day_ago[i]
temp_i_day_ago[0] = t
ma = 0
for i in range(n):
input t_i
update_temperature(t_i)
ma += (temp_i_day_ago[0] - temp_i_day_ago[m]) / m
ma_i = ma
output ma_i
由于我们不能提前知道每天的天气,我们需要一个大小为m的数组temp_i_day_ago记录前几天的天气,以计算m天移动平均数。
上述代码的时间复杂度还是有优化空间的。可以用更好的写法去掉update_temperature里的循环,把计算每天移动平均数的时间复杂度变为 O ( 1 ) O(1) O(1)。但是,这份代码的空间复杂度是无法优化的。为了算m天移动平均数,我们必须要维护一个长度为m的数组,空间复杂度一定是 O ( m ) O(m) O(m)。
对于一个变量的m移动平均数, O ( m ) O(m) O(m)的空间复杂度还算不大。但假如我们要同时维护l个变量的m移动平均数,整个算法的空间复杂度就是 O ( m l ) O(ml) O(ml)。在l很大的情况下,m对空间的影响是很大的。哪怕m取5这种很小的数,也意味着要多花4倍的空间去存储额外的数据。空间复杂度里这多出来的这个 m m m是不能接受的。
指数加权移动平均
作为移动平均数的替代,人们提出了指数加权移动平均数(Exponential Weighted Moving Average) 这种表示一段时期内数据平均值的指标。其计算公式为:
v i = β v i − 1 + ( 1 − β ) t i v_i=\beta v_{i-1} + (1 - \beta)t_i vi=βvi−1+(1−β)ti
这个公式直观上的意义为:一段时间内的平均温度,等于上一段时间的平均温度与当日温度的加权和。
相比普通的移动平均数,指数平均数最大的好处就是减小了空间复杂度。在迭代更新这个新的移动平均数时,我们只需要维护一个当前平均数 v i v_i vi,一个当前的温度 t i t_i ti即可,空间复杂度为 O ( 1 ) O(1) O(1)。
让我们进一步理解公式中的参数 β \beta β。把公式展开可得:
v i = ( 1 − β ) t i + β v i − 1 v i = ( 1 − β ) t i + ( 1 − β ) β t i − 1 + β 2 v i − 2 v i = ( 1 − β ) t i + ( 1 − β ) β t i − 1 + ( 1 − β ) β 2 t i − 2 + β 3 v i − 2 . . . \begin{aligned} v_i&=(1 - \beta)t_i + \beta v_{i-1} \\ v_i&=(1 - \beta)t_i + (1 - \beta)\beta t_{i-1} +\beta^2 v_{i-2} \\ v_i&=(1 - \beta)t_i + (1 - \beta)\beta t_{i-1} + (1 - \beta)\beta ^2t_{i-2}+ \beta^3 v_{i-2} \\ ... \end{aligned} vivivi...=(1−β)ti+βvi−1=(1−β)ti+(1−β)βti−1+β2vi−2=(1−β)ti+(1−β)βti−1+(1−β)β2ti−2+β3vi−2
从这个式子可以看出,之前数据的权重都在以 β \beta β的速度指数衰减。根据 ( 1 − ϵ ) 1 ϵ ≈ 1 e (1-\epsilon)^{\frac{1}{\epsilon}} \approx \frac{1}{e} (1−ϵ)ϵ1≈e1,并且我们可以认为一个数到了 1 e \frac{1}{e} e1就小到可以忽视了,那么指数平均数表示的就是 1 1 − β \frac{1}{1-\beta} 1−β1天内数据的平均情况。比如 β = 0.9 \beta=0.9 β=0.9表示的是10天内的平均数据, β = 0.99 \beta=0.99 β=0.99表示的是100天内的平均数据。
偏差矫正
指数平均数存在一个问题。在刚刚初始化时,指数平均数的值可能不太正确,请看:
v 1 = ( 1 − β ) t 1 v 2 = ( 1 − β ) β t 1 + ( 1 − β ) t 2 \begin{aligned} v_1 &= (1 - \beta)t_1 \\ v_2 &= (1 - \beta)\beta t_1 +(1 - \beta)t_2 \end{aligned} v1v2=(1−β)t1=(1−β)βt1+(1−β)t2
让我们把每一项前面的权重加起来。对于 v 1 v_1 v1,前面的权重和是 ( 1 − β ) (1-\beta) (1−β);对于 v 2 v_2 v2,前面的权重和是 ( 1 − β ) ( β + 1 ) (1-\beta)(\beta+1) (1−β)(β+1)。显然,这两个权重和都不为1。而计算平均数时,我们希望所有数据的权重和为1,这样才能反映出数据的真实大小情况。这里出现了权重上的“偏差”。
为了矫正这个偏差,我们应该想办法把权重和矫正为1。观察刚才的算式可以发现,第 i i i项的权重和如下:
w i = ( 1 − β ) ( 1 + β + β 2 + . . . β i ) w_i = (1-\beta)(1+\beta+\beta^2+...\beta^i) wi=(1−β)(1+β+β2+...βi)
根据等比数列求和公式,上式化简为:
w i = ( 1 − β ) ( 1 − β i ) ( 1 − β ) w i = 1 − β i \begin{aligned} w_i &= (1-\beta)\frac{(1-\beta^i)}{(1-\beta)} \\ w_i &= 1-\beta^i \end{aligned} wiwi=(1−β)(1−β)(1−βi)=1−βi
为了令权重和为1,我们可以令每一项指数平均数都除以这个和,即用下面的式子计算矫正后的指数平均数 v i ′ v_i' vi′:
v i ′ = v i 1 − β i v_i'=\frac{v_i}{1-\beta^i} vi′=1−βivi
但是,在实践中,由于这个和 1 − β i 1-\beta^i 1−βi收敛得很快,我们不会特地写代码做这个矫正。
Momentum
Gradient Descent with Momentum (使用动量的梯度下降) 是一种利用梯度的指数加权移动平均数更新参数的策略。在每次更新学习率时,我们不用本轮梯度的方向作为梯度下降的方向,而是用梯度的指数加权移动平均数作为梯度下降的方向。即对于每个参数,我们用下式做梯度下降:
V d w = β V d w + ( 1 − β ) d w V d b = β V d b + ( 1 − β ) d b w : = w − α V d w b : = b − α V d b \begin{aligned} V_{dw}&=\beta V_{dw}+ (1-\beta)dw \\ V_{db}&=\beta V_{db}+ (1-\beta)db \\ w &:= w - \alpha V_{dw} \\ b &:= b - \alpha V_{db} \end{aligned} VdwVdbwb=βVdw+(1−β)dw=βVdb+(1−β)db:=w−αVdw:=b−αVdb
也就是说,对于每个参数 p p p,我们用它的指数平均值 v d p v_{dp} vdp代替 d p dp dp进行参数的更新。
使用梯度的平均值来更新有什么好处呢?让我们来看一个可视化的例子:

不使用 Momentum 的话,每次参数更新的方向可能变化幅度较大,如上图中的蓝线所示。而使用 Momentum 后,每次参数的更新方向都会在之前的方向上稍作修改,每次的更新方向会更加平缓一点,如上图的红线所示。这样,梯度下降算法可以更快地找到最低点。
在实现时,我们不用去使用偏差矫正。 β \beta β取0.9在大多数情况下都适用,有余力的话这个参数也可以调一下。
RMSProp 和 Adam
课堂上并没有对RMSProp的原理做过多的介绍,我们只需要记住它的公式就行。我会在其他文章中介绍这几项技术的原理。
在一个神经网络中,不同的参数需要的更新幅度可能不一样。但是,在默认情况下,所有参数的更新幅度都是一样的(即学习率)。为了平衡各个参数的更新幅度,RMSProp(Root Mean Squared Propagation) 在参数更新公式中添加了一个和参数大小相关的权重 S S S。与 Momentum 类似,RMSProp使用了某种移动平均值来平滑这个权重的更新。其梯度下降公式如下:
S d w = β S d w + ( 1 − β ) d w 2 S d b = β S d b + ( 1 − β ) d b 2 w : = w − α d w S d w b : = b − α d b S d b \begin{aligned} S_{dw}&=\beta S_{dw}+ (1-\beta)dw^2 \\ S_{db}&=\beta S_{db}+ (1-\beta)db^2 \\ w &:= w - \alpha \frac{dw}{\sqrt{S_{dw}}} \\ b &:= b - \alpha \frac{db}{\sqrt{S_{db}}} \end{aligned} SdwSdbwb=βSdw+(1−β)dw2=βSdb+(1−β)db2:=w−αSdwdw:=b−αSdbdb
在编程实现时,我们应该给分母加一个极小值 ϵ \epsilon ϵ,防止分母出现0。
Adam (Adaptive Moment Estimation) 是 Momentum 与 RMSProp 的结合版。为了使用Adam,我们要先计算 Momentum 和 RMSProp 的中间变量:
V d w = β 1 V d w + ( 1 − β 1 ) d w V d b = β 1 V d b + ( 1 − β 1 ) d b S d w = β 2 S d w + ( 1 − β 2 ) d w 2 S d b = β 2 S d b + ( 1 − β 2 ) d b 2 \begin{aligned} V_{dw}&=\beta_1 V_{dw}+ (1-\beta_1)dw \\ V_{db}&=\beta_1 V_{db}+ (1-\beta_1)db \\ S_{dw}&=\beta_2 S_{dw}+ (1-\beta_2)dw^2 \\ S_{db}&=\beta_2 S_{db}+ (1-\beta_2)db^2 \end{aligned} VdwVdbSdwSdb=β1Vdw+(1−β1)dw=β1Vdb+(1−β1)db=β2Sdw+(1−β2)dw2=β2Sdb+(1−β2)db2
之后,根据前面的偏差矫正,获得这几个变量的矫正值:
如前文所述,在实现时添加偏差矫正意义不大。估计这里加上偏差矫正是因为原论文加了。
V d w ′ = V d w 1 − β 1 t V d b ′ = V d b 1 − β 1 t S d w ′ = S d w 1 − β 2 t S d b ′ = S d b 1 − β 2 t \begin{aligned} V_{dw}'&=\frac{V_{dw}}{1-\beta_1^t} \\ V_{db}'&=\frac{V_{db}}{1-\beta_1^t} \\ S_{dw}'&=\frac{S_{dw}}{1-\beta_2^t} \\ S_{db}'&=\frac{S_{db}}{1-\beta_2^t} \\ \end{aligned} Vdw′Vdb′Sdw′Sdb′=1−β1tVdw=1−β1tVdb=1−β2tSdw=1−β2tSdb
最后,进行参数的更新:
w : = w − α V d w ′ S d w ′ + ϵ b : = b − α V d b ′ S d b ′ + ϵ \begin{aligned} w &:= w - \alpha \frac{V_{dw}'}{\sqrt{S_{dw}'}+\epsilon} \\ b &:= b - \alpha \frac{V_{db}'}{\sqrt{S_{db}'}+\epsilon} \end{aligned} wb:=w−αSdw′+ϵVdw′:=b−αSdb′+ϵVdb′
和之前一样,这里的 ϵ \epsilon ϵ是一个极小值。在编程时添加 ϵ \epsilon ϵ,一般都是为了防止分母中出现0。
Adam是目前非常流行的优化算法,它的表现通常都很优秀。为了用好这个优化算法,我们要知道它的超参数该怎么调。在原论文中,这个算法的超参数取值如下:
β 1 = 0.9 β 2 = 0.999 ϵ = 1 0 − 8 \begin{aligned} \beta_1 &= 0.9 \\ \beta_2 &= 0.999 \\ \epsilon &= 10^{-8} \end{aligned} β1β2ϵ=0.9=0.999=10−8
绝大多数情况下,我们不用手动调这三个超参数。
学习率衰减
训练时的学习率不应该是一成不变的。在优化刚开始时,参数离最优值还差很远,选较大的学习率能加快学习速度。但是,经过了一段时间的学习后,参数离最优值已经比较近了。这时,较大的学习率可能会让参数错过最优值。因此,在训练一段时间后,减小学习率往往能够加快网络的收敛速度。这种训练一段时间后减小学习率的方法叫做学习率衰减。
其实学习率衰减只是一种比较宏观的训练策略,并没有绝对正确的学习率衰减方法。我们可以设置初始学习率 α 0 \alpha_0 α0,之后按下面的公式进行学习率衰减:
α = 1 1 + D e c a y R a t e ∗ E p o c h N u m α 0 \alpha = \frac{1}{1 + DecayRate \ast EpochNum}\alpha_0 α=1+DecayRate∗EpochNum1α0
这个公式非常简单,初始学习率会随着一个衰减率(DecayRate)和训练次数(EpochNum)衰减。
同样,我们还可以使用指数衰减:
α = 0.9 5 E p o c h N u m α 0 \alpha = 0.95^{EpochNum}\alpha_0 α=0.95EpochNumα0
或者其他一些奇奇怪怪的衰减方法(k是超参数):
α = k E p o c h N u m α 0 \alpha = \frac{k}{\sqrt{EpochNum}}\alpha_0 α=EpochNumkα0
甚至我们可以手动调学习率,每训练一段时间就把学习率调整成一个更小的常数。
总之,学习率衰减是一条启发性的规则。我们可以有意识地在训练中后期调小学习率。
局部最优值
在执行梯度下降算法时,局部最优值可能会影响算法的表现:在局部最优值处,各个参数的导数都是0。梯度是0(所有导数为0),意味着梯度下降法将不再更新了。
在待优化参数较少时,陷入局部最优值是一种比较常见的情况。而对于参数量巨大的深度学习项目来说,整个模型陷入局部最优值是一个几乎不可能发生的事情。某参数在梯度为0时,既有可能是局部最优值,也可能是局部最差值。不妨设两种情况的概率都是0.5。如果整个模型都陷入了局部最优值,那么所有参数都得处于局部最优值上。假设我们的深度学习模型有10000个参数,则一个梯度为0的点是局部最优值的概率是 0. 5 10000 0.5^{10000} 0.510000,这是一个几乎不可能发生的事件。
所以,在深度学习中,更常见的梯度为0的点是鞍点(某处梯度为0,但不是局部最值)。在鞍点处,有很多参数都处于局部最差值上,只要稍微对这些参数做一些扰动,参数就会往更小的方向移动。因此,鞍点不会对学习算法产生影响。
在深度学习中,一种会影响学习速度的情况叫做“高原”(plateau)。在高原处,梯度的值一直都很小。只有跨过了这段区域,学习的速度才会快起来。这种情况的可视化结果如下:

总而言之,深度学习问题和简单的优化问题不太一样,不用过多担心局部最优值的问题。而高原现象确实会影响学习的速度。
总结
这周,我们围绕深度学习的优化算法,学习了许多提升梯度下降法性能的技术。让我们来捋一捋。
首先,我们可以在处理完一小批数据后就执行梯度下降,而不必等处理完整个数据集后再执行。这种算法叫分批梯度下降(mini-batch gradient descent)。这是一种对梯度下降法的通用改进方法,即默认情况下,这种算法都可以和其他改进方法同时使用。
之后,我们学习了移动平均的概念,知道移动平均值可以更平滑地反映数据在一段时间内的趋势。基于移动平均值,有 gradient descent with momentum 和 RMSProp 这两种梯度下降的改进方法。而现在非常常用的 Adam 优化算法是Momentum 和 RMSProp 的结合版。
最后,我们学习了学习率衰减的一些常见方法。
学完本课的内容后,我认为我们应该对相关知识达到下面的掌握程度:
- 分批梯度下降
- 了解原理
- 掌握如何选取合适的 batch size
- 高级优化算法
- 了解移动平均数的思想
- 了解 Adam 的公式
- 记住 Adam 超参数的常见取值
- 未来学习了编程框架后,会调用 Momentum,Adam 优化器
- 学习率衰减
- 掌握“学习率衰减能加速收敛”这一概念
- 在训练自己的模型时,能够有意识地去调小学习率
- 局部最优值
- 不用管这个问题
代码实战
这周,官方的编程作业还是点集分类。我觉得这个任务太简单了,还是挑战小猫分类比较有意思。
在这周的代码实战项目中,让我们先回顾一下整个项目的框架,再实现这周学到的技术,包括分批梯度下降(Mini-batch Gradient Descent)、高级梯度下降算法(Mini-batch Gradient Descent)、学习率衰减。
项目链接:
https://github.com/SingleZombie/DL-Demos/tree/master/dldemos/AdvancedOptimizer
小猫分类项目框架
数据集
和之前一样,我们即将使用一个 kaggle 上的猫狗分类数据集。我已经写好了读取数据的函数,该函数的定义如下:
def get_cat_set(
data_root: str,
img_shape: Tuple[int, int] = (224, 224),
train_size=1000,
test_size=200,
) -> Tuple[np.ndarray, np.ndarray, np.ndarray, np.ndarray]:
填入数据集根目录、图像Reszie后的大小、一半训练集的大小、一半测试集的大小,我们就能得到预处理后的train_X, train_Y, dev_X, dev_Y。其中,X的形状是(n_x, m), Y的形状是(1, m)。n_x是图像的特征数,对于一个大小为(224, 224)的图像,n_x = 224*224*3。m是样本数量,如果train_size=1000,则m=2000。
在之前的实战中,我的模型在训练集上的表现都十分糟糕,还没有用到“测试集”的机会。因此,我们之前那个“测试集”,既可以认为是开发集,也可以认为是测试集。从这周开始,出于严谨性的考虑,我准备把之前的“测试集”正式称作开发集(dev set)。
模型类
和之前一样,我们用BaseRegressionModel来表示一个最后一层使用sigmoid,loss用交叉熵的二分类模型基类。这个基类的定义如下:
class BaseRegressionModel(metaclass=abc.ABCMeta):
def __init__(self):
pass
@abc.abstractmethod
def forward(self, X: np.ndarray, train_mode=True) -> np.ndarray:
pass
@abc.abstractmethod
def backward(self, Y: np.ndarray) -> np.ndarray:
pass
@abc.abstractmethod
def get_grad_dict(self) -> Dict[str, np.ndarray]:
pass
@abc.abstractmethod
def save(self) -> Dict[str, np.ndarray]:
pass
@abc.abstractmethod
def load(self, state_dict: Dict[str, np.ndarray]):
pass
def loss(self, Y: np.ndarray, Y_hat: np.ndarray) -> np.ndarray:
return np.mean(-(Y * np.log(Y_hat) + (1 - Y) * np.log(1 - Y_hat)))
def evaluate(self, X: np.ndarray, Y: np.ndarray, return_loss=False):
Y_hat = self.forward(X, train_mode=False)
Y_hat_predict = np.where(Y_hat > 0.5, 1, 0)
accuracy = np.mean(np.where(Y_hat_predict == Y, 1, 0))
if return_loss:
loss = self.loss(Y, Y_hat)
return accuracy, loss
else:
return accuracy
在模型类中,和训练有关的主要有forward, backward, get_grad_dict这三个方法,分别表示前向传播、反向传播、梯度获取。
这里要对get_grad_dict做一个说明。之前我们都是直接在模型类里实现梯度下降的,但在这周学了新的优化算法后,这种编程方式就不太方便拓展了。因此,从这周开始,我们应该用一个BaseOptimizer类来表示各种梯度下降算法。模型通过get_grad_dict把梯度传给优化器。
除了和训练相关的方法外,模型类通过save, load来把数据存入/取自一个词典,通过loss, evaluate来获取一些模型评测指标。
BaseRegressionModel只是一个抽象基类。实际上,我在本项目使用的是第四周学习的深层神经网络(任意层数的全连接网络)DeepNetwork。只需要传入每一层神经元个数、每一层的激活函数,我们就能得到一个全连接分类网络:
class DeepNetwork(BaseRegressionModel):
def __init__(self, neuron_cnt: List[int], activation_func: List[str]):
...
在第四周代码的基础上,我修改了一下参数初始化的方法。由于隐藏层的激活函数都用的是ReLU,我打算默认使用 He Initialization:
for i in range(self.num_layer):
self.W.append(
np.random.randn(neuron_cnt[i + 1], neuron_cnt[i]) *
np.sqrt(2 / neuron_cnt[i]))
除此之外,我没有在这个模型上添加其他高级功能。我也没有添加正则化。现在网络还处于欠拟合状态,等我有资格解决过拟合问题时再去考虑正则化。
优化器类
看完了模型类,接下来,我们来看一看这周要实现的优化器类。所有的优化器类都继承自基类BaseOptimizer。
class BaseOptimizer(metaclass=abc.ABCMeta):
def __init__(
self,
param_dict: Dict[str, np.ndarray],
learning_rate: float,
lr_scheduler: Callable[[float, int], float] = const_lr) -> None:
self.param_dict = param_dict
self._epoch = 0
self._num_step = 0
self._learning_rate_zero = learning_rate
self._lr_scheduler = lr_scheduler
@property
def epoch(self) -> int:
return self._epoch
@property
def learning_rate(self) -> float:
return self._lr_scheduler(self._learning_rate_zero, self.epoch)
def increase_epoch(self):
self._epoch += 1
def save(self) -> Dict:
return {'epoch': self._epoch, 'num_step': self._num_step}
def load(self, state_dict: Dict):
self._epoch = state_dict['epoch']
self._num_step = state_dict['num_step']
def zero_grad(self):
for k in self.grad_dict:
self.grad_dict[k] = 0
def add_grad(self, grad_dict: Dict[str, np.ndarray]):
for k in self.grad_dict:
self.grad_dict[k] += grad_dict[k]
@abc.abstractmethod
def step(self):
pass
这个优化器基类实现了以下功能:
- 维护当前的
epoch和step,以辅助其他参数的计算。 - 维护当前的学习率,并通过使用
_lr_scheduler的方式支持学习率衰减。 - 定义了从词典中保存/读取优化器的方法
save, load。 - 定义了维护的梯度的清空梯度方法
zero_grad和新增梯度方法add_grad。 - 允许子类实现
step方法,以使用不同策略更新参数。
在后续章节中,我会介绍该如何使用这个基类实现这周学过的优化算法。
模型训练
基于上述的BaseRegressionModel和BaseOptimizer,我们可以写出下面的模型训练函数:
def train(model: BaseRegressionModel,
optimizer: BaseOptimizer,
X,
Y,
total_epoch,
batch_size,
model_name: str = 'model',
save_dir: str = 'work_dirs',
recover_from: Optional[str] = None,
print_interval: int = 100,
dev_X=None,
dev_Y=None):
if recover_from:
load_state_dict(model, optimizer, recover_from)
# Prepare mini_batch
...
for e in range(total_epoch):
for mini_batch_X, mini_batch_Y in mini_batch_XYs:
mini_batch_Y_hat = model.forward(mini_batch_X)
model.backward(mini_batch_Y)
optimizer.zero_grad()
optimizer.add_grad(model.get_grad_dict())
optimizer.step()
currrent_epoch = optimizer.epoch
if currrent_epoch % print_interval == 0:
# print loss
...
optimizer.increase_epoch()
save_state_dict(model, optimizer,
os.path.join(save_dir, f'{model_name}_latest.npz'))
训练之前,我们可以从模型文件recover_from里读取模型状态和优化器状态。读取数据是通过load_state_dict实现的:
def load_state_dict(model: BaseRegressionModel, optimizer: BaseOptimizer,
filename: str):
state_dict = np.load(filename)
model.load(state_dict['model'])
optimizer.load(state_dict['optimizer'])
在得到某一批训练数据X, Y后,我们可以用下面的代码执行一步梯度下降:
Y_hat = model.forward(X)
model.backward(Y)
optimizer.zero_grad()
optimizer.add_grad(model.get_grad_dict())
optimizer.step()
我们会先调用模型的前向传播forward和反向传播backward,令模型存下本轮的梯度。之后,我们重置优化器,把梯度从模型传到优化器,再调用优化器进行更新。
训练代码中,默认使用了mini-batch。我会在后续章节介绍mini-batch的具体实现方法。
完成了梯度的更新后,我们要维护当前的训练代数epoch。训练了几代后,我们可以评测模型在整个训练集和开发集上的性能指标。
currrent_epoch = optimizer.epoch
if currrent_epoch % print_interval == 0:
# print loss
...
optimizer.increase_epoch()
最后,模型训练结束后,我们要保存模型。保存模型是通过save_state_dict实现的:
def save_state_dict(model: BaseRegressionModel, optimizer: BaseOptimizer,
filename: str):
state_dict = {'model': model.save(), 'optimizer': optimizer.save()}
np.savez(filename, **state_dict)
如果你对np.savez函数不熟,欢迎回顾我在第四周代码实战中对其的介绍。
总之,基于我们定义的BaseRegressionModel和BaseOptimizer,我们可以在初始化完这个两个类的对象后,调用train来完成模型的训练。
使用 Mini-batch
注意 I/O 开销!
重申一下,Mini-batch gradient descent 的本意是加快训练速度。如果实现了 Mini-batch 后,程序在其他地方跑得更慢了,那么使用这个算法就毫无意义了。
在我们这个小型的深度学习项目中,从硬盘上读取数据的开销是极大的。下图是执行包含前后处理在内的一轮训练的时间开销分布:

从图中可以看出,相对于一轮训练,读取数据的开销是极大的。读取数据的时间甚至约等于两轮训练的时间。
在之前的项目中,我一直默认是把训练数据全部读取到内存中,然后再进行训练。这样的好处是网络的训练速度不受硬盘读写速度限制,会加快不少,坏处是训练数据的总量受到电脑内存的限制。
在使用分批梯度下降算法时,为了比较算法在性能上的提升,我们应该继续使用相同的数据管理策略,即把数据放到内存中处理。如果换了算法,还换了数据管理策略,把一次性读取数据改成每次需要数据的时候再去读取,那么我们就无法观察到算法对于性能的提升。
事实上,在大型深度学习项目中,模型执行一轮训练的速度很慢,I/O的开销相对来说会小很多。在这种时候,我们可以仅在需要时再读取数据。不过,在这种情况下,我们依然要保证内存/显存足够支持一轮mini-batch的前向/反向传播。这里要注意一下我们这个小demo和实际深度学习项目的区别。
mini-batch 预处理
在执行一个epoch(代)的训练时,我们应该保证训练数据是打乱的,以避免极端数据分布给训练带来的副作用。
epoch 与 epoch 之间 mini-batch 的划分是否相同到不是那么重要。理论上来说,数据越平均越好,最好能每个 epoch 都重新划分 mini-batch。但是,为了加速训练,同时让使用 mini-batch 的逻辑更加易懂,我打算先预处理出 mini-batch,之后每个 epoch 都使用相同的划分。
为了方便之后的处理,我们把每个mini-batch的X和Y都单独存入数组mini_batch_XYs。这样,在之后的训练循环里,每个mini-batch的数据就可以直接拿来用了。以下是预处理mini-batch的代码:
m = X.shape[1]
indices = np.random.permutation(m)
shuffle_X = X[:, indices]
shuffle_Y = Y[:, indices]
num_mini_batch = math.ceil(m / batch_size)
mini_batch_XYs = []
for i in range(num_mini_batch):
if i == num_mini_batch - 1:
mini_batch_X = shuffle_X[:, i * batch_size:]
mini_batch_Y = shuffle_Y[:, i * batch_size:]
else:
mini_batch_X = shuffle_X[:, i * batch_size:(i + 1) * batch_size]
mini_batch_Y = shuffle_Y[:, i * batch_size:(i + 1) * batch_size]
mini_batch_XYs.append((mini_batch_X, mini_batch_Y))
在这段代码中,我们首先用第二周编程练习中学过的permutation生成一个随机排列,并根据这个随机排列打乱数据。
之后的代码就是一段常见的数据除法分块逻辑。对于除得尽和除不尽的mini-batch,我们分开处理,提取出每个mini_batch的X和Y。
mini-batch 训练
预处理得当的话,用mini-batch进行训练的代码非常简洁。我们只需要在原来的训练循环里加一个对mini-batch的遍历即可:
for e in range(num_epoch):
for mini_batch_X, mini_batch_Y in mini_batch_XYs:
mini_batch_Y_hat = model.forward(mini_batch_X)
model.backward(mini_batch_Y)
model.gradient_descent(learning_rate)
mini-batch 的损失函数曲线
和我们在课堂里学的一样,使用mini-batch后,损失函数的曲线可能不像之前那么平滑。这是因为我们画损失函数曲线时用的是每个mini-batch上的损失函数,而不是整个训练集的损失函数。我得到的一个mini-batch损失函数曲线如下:

在训练时,我顺手存了一下每个mini-batch的梯度,并在训练结束后对它们进行可视化:
mini_batch_loss_list = []
for e in range(num_epoch):
for mini_batch_X, mini_batch_Y in mini_batch_XYs:
...
if plot_mini_batch:
loss = model.loss(mini_batch_Y, mini_batch_Y_hat)
mini_batch_loss_list.append(loss)
if plot_mini_batch:
plot_length = len(mini_batch_loss_list)
plot_x = np.linspace(0, plot_length, plot_length)
plot_y = np.array(mini_batch_loss_list)
plt.plot(plot_x, plot_y)
plt.show()
实现高级优化算法
有了基类BaseOptimizer后,我们只需要实现子类的构造函数和更新函数,就可以实现各种各样的改进梯度下降算法了。让我们看一下这周学习的Momentum, RMSProp, Adam该如何实现。
Momentum
Momentum的主要实现代码如下:
class Momentum(BaseOptimizer):
def __init__(self,
param_dict: Dict[str, np.ndarray],
learning_rate: float,
beta: float = 0.9,
from_scratch=False) -> None:
super().__init__(param_dict, learning_rate)
self.beta = beta
self.grad_dict = deepcopy(self.param_dict)
if from_scratch:
self.velocity_dict = deepcopy(self.param_dict)
for k in self.velocity_dict:
self.velocity_dict[k] = 0
def step(self):
self._num_step += 1
for k in self.param_dict:
self.velocity_dict[k] = self.beta * self.velocity_dict[k] + \
(1 - self.beta) * self.grad_dict[k]
self.param_dict[k] -= self.learning_rate * self.velocity_dict[k]
在Momentum中,我们主要是维护velocity_dict这个变量。根据课堂里学过的知识,这个变量的值等于梯度的指数移动平均值。因此,我们只需要在step里维护一个指数平均数即可。
为了保存优化器的状态,我们应该在save, load里保存velocity_dict:
def save(self) -> Dict:
state_dict = super().save()
state_dict['velocity_dict'] = self.velocity_dict
return state_dict
def load(self, state_dict: Dict):
self.velocity_dict = state_dict.get('velocity_dict', None)
if self.velocity_dict is None:
self.velocity_dict = deepcopy(self.param_dict)
for k in self.velocity_dict:
self.velocity_dict[k] = 0
super().load(state_dict)
RMSProp
RMSProp的主要实现代码如下:
class RMSProp(BaseOptimizer):
def __init__(self,
param_dict: Dict[str, np.ndarray],
learning_rate: float,
beta: float = 0.9,
eps: float = 1e-6,
from_scratch=False,
correct_param=True) -> None:
super().__init__(param_dict, learning_rate)
self.beta = beta
self.eps = eps
self.grad_dict = deepcopy(self.param_dict)
self.correct_param = correct_param
if from_scratch:
self.s_dict = deepcopy(self.param_dict)
for k in self.s_dict:
self.s_dict[k] = 0
def step(self):
self._num_step += 1
for k in self.param_dict:
self.s_dict[k] = self.beta * self.s_dict[k] + \
(1 - self.beta) * np.square(self.grad_dict[k])
if self.correct_param:
s = self.s_dict[k] / (1 - self.beta**self._num_step)
else:
s = self.s_dict[k]
self.param_dict[k] -= self.learning_rate * self.grad_dict[k] / (
np.sqrt(s + self.eps))
和Momentum类似,我们要维护一个指数平均数权重s_dict,并在更新参数时算上这个权重。由于RMSProp是除法运算,为了防止偶尔出现的除以0现象,我们要在分母里加一个极小值eps。
我在这个优化器中加入了偏差校准功能。如果开启了校准,指数平均数会除以一个(1 - self.beta**self._num_step)。
类似地,RMSProp中也用save, load来保存状态s_dict。
def save(self) -> Dict:
state_dict = super().save()
state_dict['s_dict'] = self.s_dict
return state_dict
def load(self, state_dict: Dict):
self.s_dict = state_dict.get('s_dict', None)
if self.s_dict is None:
self.s_dict = deepcopy(self.param_dict)
for k in self.s_dict:
self.s_dict[k] = 0
super().load(state_dict)
注意,RMSProp实际上是对学习率进行了一个放缩。在把模型的优化算法从Momentum改成RMSProp后,学习率要从头调整。一般来说,RMSProp里的权重s_dict是一个小于1的数。这个数做了分母,等价于放大了学习率。因此,使用RMSProp后,可以先尝试把学习率调小100倍左右,再做进一步的调整。
Adam
Adam 的主要实现代码如下:
class Adam(BaseOptimizer):
def __init__(self,
param_dict: Dict[str, np.ndarray],
learning_rate: float,
beta1: float = 0.9,
beta2: float = 0.999,
eps: float = 1e-8,
from_scratch=False,
correct_param=True) -> None:
super().__init__(param_dict, learning_rate)
self.beta1 = beta1
self.beta2 = beta2
self.eps = eps
self.grad_dict = deepcopy(self.param_dict)
self.correct_param = correct_param
if from_scratch:
self.v_dict = deepcopy(self.param_dict)
self.s_dict = deepcopy(self.param_dict)
for k in self.v_dict:
self.v_dict[k] = 0
self.s_dict[k] = 0
def step(self):
self._num_step += 1
for k in self.param_dict:
self.v_dict[k] = self.beta1 * self.v_dict[k] + \
(1 - self.beta1) * self.grad_dict[k]
self.s_dict[k] = self.beta2 * self.s_dict[k] + \
(1 - self.beta2) * (self.grad_dict[k] ** 2)
if self.correct_param:
v = self.v_dict[k] / (1 - self.beta1**self._num_step)
s = self.s_dict[k] / (1 - self.beta2**self._num_step)
else:
v = self.v_dict[k]
s = self.s_dict[k]
self.param_dict[k] -= self.learning_rate * v / (np.sqrt(s) +
self.eps)
Adam 就是把 Momentum 和 RMSProp 结合一下。在Adam中,我们维护v_dict和s_dict两个变量,并根据公式利用这两个变量更新参数。
这里有一个小细节:在Adam中,
eps是写在根号外的,而RMSProp中eps是在根号里面的。这是为了与原论文统一。其实eps写哪都差不多,只要不让分母为0即可。
类似地,Adam要在状态词典里保存两个变量:
def save(self) -> Dict:
state_dict = super().save()
state_dict['v_dict'] = self.v_dict
state_dict['s_dict'] = self.s_dict
return state_dict
def load(self, state_dict: Dict):
self.v_dict = state_dict.get('v_dict', None)
self.s_dict = state_dict.get('s_dict', None)
if self.v_dict is None:
self.v_dict = deepcopy(self.param_dict)
for k in self.v_dict:
self.v_dict[k] = 0
if self.s_dict is None:
self.s_dict = deepcopy(self.param_dict)
for k in self.s_dict:
self.s_dict[k] = 0
super().load(state_dict)
Adam使用的学习率和RMSProp差不多。如果有一个在RMSProp上调好的学习率,可以直接从那个学习率开始调。
学习率衰减
要实现学习率衰减非常容易,我们只需要用一个实时计算学习率的学习率getter来代替静态的学习率即可。在BaseOptimizer中,我们可以这样实现学习率衰减:
class BaseOptimizer(metaclass=abc.ABCMeta):
def __init__(
self,
param_dict: Dict[str, np.ndarray],
learning_rate: float,
lr_scheduler: Callable[[float, int], float] = const_lr) -> None:
self.param_dict = param_dict
self._epoch = 0
self._num_step = 0
self._learning_rate_zero = learning_rate
self._lr_scheduler = lr_scheduler
@property
def learning_rate(self) -> float:
return self._lr_scheduler(self._learning_rate_zero, self.epoch)
在BaseOptimizer类中,我们用@property装饰器装饰一个learning_rate方法,以实现一个getter函数。这样,我们在获取optimizer.learning_rate这个属性时,实际上是在调用learning_rate这个函数。
在getter中,我们用_lr_scheduler来实时计算一个学习率。_lr_scheduler是一个函数,该函数应该接受初始学习率、当前的epoch这两个变量,返回一个当前学习率。通过修改这个_lr_scheduler,我们就能使用不同的学习率衰减算法。
在代码中,我只实现了两个简单的学习率衰减函数。首先是常数学习率:
def const_lr(learning_rate_zero: float, epoch: int) -> float:
return learning_rate_zero
之后是课堂上学过的双曲线衰减函数:
def get_hyperbola_func(decay_rate: float) -> Callable[[float, int], float]:
def scheduler(learning_rate_zero: float, epoch: int):
return learning_rate_zero / (1 + epoch * decay_rate)
return scheduler
get_hyperbola_func是一个返回函数的函数。我们可以用get_hyperbola_func(decay_rate)生成一个某衰减率的学习率衰减函数。
实验结果
经实验,高级优化技术确实令训练速度有显著的提升。为了比较不同优化技术的性能,我使用2000个小猫分类样本作为训练集,使用了下图所示的全连接网络,比较了不同batch size、不同优化算法、不同学习率衰减方法下整个数据集的损失函数变化趋势。

以下是实验的结果:
首先,我比较了不同batch size下的mini-batch梯度下降。

从理论上来看,对于同一个数据集,执行相同的epoch,batch size越小,执行优化的次数越多,优化的效果越好。但是,batch size越小,执行一个epoch花的时间就越多。batch size过小的话,计算单元的向量化计算无法得到充分利用,算法的优化效率(单位时间内的优化量)反而下降了。
上面的实验结果和理论一致。执行相同的epoch,batch size越小,优化的效果越好。同时,batch size越小,误差也更容易出现震荡。虽然看上去batch size越小效果就越好,但由于向量化计算的原因,batch size为64,128,2000时跑一个epoch都差不多快,batch size为8时跑一个epoch就很慢了。我还尝试了batch size为1的随机梯度下降,算法跑一个epoch的速度奇慢无比,程序运行效率极低。最终,我把64作为所有优化算法的batch size。
之后,我比较了普通梯度下降、Momentum、RMSProp、Adam的优化结果。在普通梯度下降和Momentum中,我的学习率为1e-3;在RMSProp和Adam中,我的学习率为1e-5。
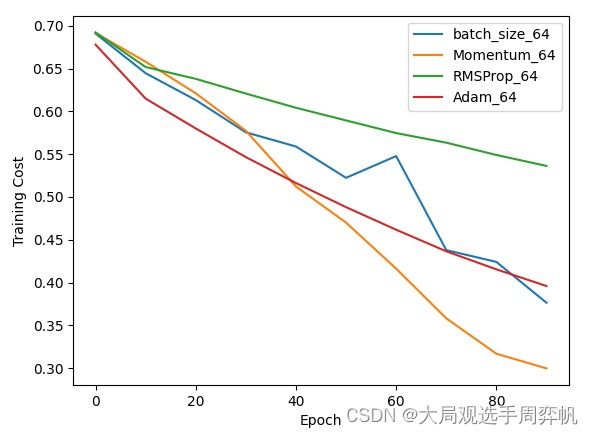
由于不同算法的学习率“尺度”不一样,因此,应该去比较普通梯度下降和Momentum,RMSProp和Adam这两组学习率尺度一样的实验。
对比普通梯度下降和Momentum,可以看出Momentum能够显著地提升梯度下降的性能,并且让误差的变化更加平滑。
对比RMSProp和Adam,可以看出学习率相同且偏小的情况下,Adam优于RMSProp。
感觉Adam的性能还是最优秀的。如果把Adam的学习率再调一调,优化效果应该能够超过其他算法。
最后,我还尝试了三个学习率衰减策略实验。每次实验都使用Adam优化器,初始学习率都是1e-5。第一次实验固定学习率,之后的两次实验分别使用衰减系数0.2,0.005的双曲线衰减公式。以下是实验结果:

从图中可以看出,由于初始学习率较低,在使用了比较大的衰减系数(=0.2)时,虽然学习的过程很平滑,但是学习速度较慢。而如果使用了恰当的衰减系数,虽然学习率在缓缓降低,但学习的步伐可能更加恰当,学习的速度反而变快了。
不过,RMSProp本身就自带调度学习率的效果。主动使用学习率衰减的效果可能没有那么明显。相比mini-batch和高级优化算法,学习率衰减确实只能算是一种可选的策略。
感想
我的实验还做得不是很充分。理论上可以再调一调学习率,更加公平地比较不同的学习算法。但是,我已经没有动力去进一步优化超参数了——由于目前学习算法的性能过于优秀,模型已经在训练集上过拟合了,训练准确率达到了80%多,远大于58%的开发准确率。因此,根据上一周学的知识,我的下一步任务不是继续降低训练误差,而是应该使用正则化方法或者其他手段,提高模型的泛化能力。在后续的课程中,我们还会接着学习改进深度学习项目的方法,届时我将继续改进这个小猫分类模型。
其实,过拟合对我来说是一件可喜可贺的事情。前两周,仅使用普通梯度下降时,模型的训练准确率和测试准确率都很低,我还在怀疑是不是我的代码写错了。现在看来,这完全是梯度下降算法的锅。朴素的梯度下降算法的性能实在是太差了。稍微使用了mini-batch、高级优化算法等技术后,模型的训练速度就能有一个质的飞跃。在深度学习项目中,mini-batch, Adam优化器应该成为优化算法的默认配置。