【机器学习】图像预处理
目录
-
- 参考
- 图像处理的形式
- 图像预处理
- 灰度变换
-
- 反转
- 对比度增强
- 对比度压缩
- 伽马矫正
- 直方图
-
- 彩色直方图
- 直方图均衡化
- 直方图规定化
- 空间滤波
-
- 模板运算
- 均值滤波
- 高斯滤波
- 中值滤波
- 图像锐化
- 边缘检测
- 图像锐化实现
- 坐标转换
-
- 平移
- 镜像
- 旋转
- 缩放
-
- 最邻近插值
- 双线性插值
- 仿射变换
- 透视变换
- 彩色图像处理
- 图像预处理技术在深度学习中的应用
参考
华为云学院
图像处理的形式
(1)单幅图像输入->单幅图像输出
(2)多幅图像输入->单幅图像输出
(3)单幅图像输入->数字或符号等内容输出
(4)多幅图像输入->数字或符号等内容输出
其中(1),(2)对数据的形式没有做出改变,所以属于图像的预处理。
图像预处理
图像预处理的方法包括:灰度变化,几何矫正,图像增强,图像滤波等。
灰度变换
将原始图像中一个点的灰度值,根据特定映射函数映射到另一个灰度值
反转
“黑色变为白色,白色变为黑色”

对比度增强
如下图像所示,(d2-d1)>(s2-s1),原始图像中灰度级出于[s1,s2]区间内的像素点呗拉伸到[d1,d2]区间,达到对比度增强的效果

对比度压缩

伽马矫正

伽马矫正的函数是y=cs^r,当r>1时,原本比较亮的地方的灰度被拉伸,对比度增强,可以“看得比较清楚”。暗的地方被压缩,对比度减弱,“越来越看不清楚”。当0
直方图
以灰度级为横坐标,纵坐标为灰度级出现频率的关系图称为灰度直方图,它反映了图像灰度的分布情况。针对直方图的图像变换是一种基于概率论的方法。相对于灰度变换只针对单独的像素操作,直方图变换中和考虑了全图的灰度图分布。

彩色直方图

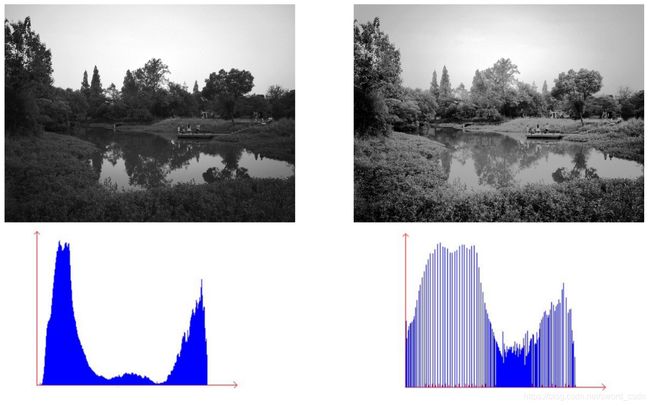
直方图均衡化
调整原始图像的直方图,使之呈均衡分布的样式,可以有效增强图像的整体对比度。
直方图规定化
调整原始图像的直方图,使得概率分布逼近目标直方图的概率分布
空间滤波
灰度变换是点变换,输出值和指定像素点相关,直方图变换是全局处理,输出值和整幅图像相关。空间滤波是一种局部处理方式,像素p的输出值由p机器领域N的像素值确定(卷积核)。
计算方法是将领域N的像素值和同样尺寸的子图像进行模板运算。子图像呗称为“模板”、“核”或“滤波器”,常用的有模板卷积核模板排序。
模板运算
记滤波器是一副nxn的图像w,n一般为奇数,每个位置上值称为权重w,原始图像的灰度值为s,计算后的值为d,则p点的输出值为:

模板排序将邻域N的像素值进行排序,然后选择特定序号的灰度值。
均值滤波
用于图像平滑,去噪声,但是如果模板尺寸增大,图像会变得模糊,也用于图像的模糊化。

高斯滤波
高斯滤波可以减少模糊化。

中值滤波
属于模板排序范畴,对椒盐噪声的抑制效果很好,但是这种处理方式是非线性的,所以会破坏像素点之间的线性关系,不适用于点、线等细节较多的图像或高精度图像。

图像锐化
突出图像中的边缘、轮廓线和图像细节,最常用的方法是梯度法。对于离散图像的梯度,一阶偏导数采用一阶差分近似表示


二阶差分

边缘检测
边缘检测的算子主要有:Prewitt算子(一阶)、Sobel(一阶)、Laplacian(二阶)


图像锐化实现
将求取的边缘按照一定系数比例叠加到原始图像上,即可实现对图像的锐化。

坐标转换
图像的坐标变换称为图像的几何计算,常见的包括:平移、旋转、镜像、缩放等。
这些变换都可以通过坐标向量和变换矩阵的乘法操作实现。
平移


镜像
水平镜像和垂直镜像的变换矩阵分别如下:


旋转

如果旋转轴不处于原点,变换矩阵的计算会比较复杂,可借助平移来简化操作
(1)通过平移将旋转轴移动至原点。
(2)基于旋转轴为原点的旋转变换。
(3)通过平移将旋转轴恢复到原始位置。

缩放
将分辨率为(w,h)的图像,缩放为(w’,h’)。则水平方向的缩放系数Sx = w’/w,垂直方向的缩放系数为Sy = h’/h


实际上数字图像中的(x,y)的值都是整数,但是坐标变换后的(x’,y’)不一定是整数,非整数坐标处的像素值需要用周围整数坐标的像素值来计算,这个过程叫“插值”。
最邻近插值
直接用最靠近(x’,y’)的整数坐标处的灰度值作为(x’,y’)的值。这种方法计算量小,精确度不高,并且会破坏图像的线性关系。
双线性插值
使用(x’,y’)最近邻的四个像素值进行插值计算。

仿射变换
包括平移、缩放、旋转、镜像等。保留了图像的“平行性”和“平直性”

仿射变换T矩阵有6个参数,需要3个像素点变换前后的对应坐标。

透视变换
在实际三维空间中,图像的畸变存在近大远小的特征,仿射变换不能进行修正。此时需要透视变换

透视变换矩阵有8个参数,所以需要4个像素点变换前后的对应坐标来求取。

彩色图像处理
有两种思路可对多通道图像进行处理
(1)把它看做多幅单通道图像的组合体。
(2)将每个像素看做一个多维度的向量。
图像预处理技术在深度学习中的应用
经常用作训练数据集的数据增强(data augmentation),常用方法有:缩放,拉伸,加入噪点,翻转,旋转,平移,剪切,对比度调整,通道变换。