pytorch源码解析系列-yolov4最核心技巧代码详解(4)- 训练过程
补一下源码地址
我们先从简单的开始说起,怎么判断loss?要先判断目标检测的准确率标准,标准就是IOU(目标图片和预测图片的交并比)
IOU
yolov4用了CIOU_loss 和DIOU_LOSS
简单说一下,有个具体了解,都是从左到右发展来的
| IOU | GIOU | DIOU | CIOU | |
|---|---|---|---|---|
| 作用 | 主要考虑检测框和目标框重叠面积 | 在IOU的基础上,解决边界框不重合时的问题 | 在IOU和GIOU的基础上,考虑边界框中心点距离的信息 | 在DIOU的基础上,考虑边界框宽高比的尺度信息 |
| 具体实现 | 交并比 | 加了一个尺度相交(两个矩形外接最大矩形) | GIOU+欧式距离/中心点距离 | DIOU+长宽比 |
看代码就更直观了解他们的运作方式了
if GIoU or DIoU or CIoU:
if GIoU: #area_c 就是外接矩形
area_c = torch.prod(con_br - con_tl, 2) # br tl对应button right和 top left坐标,这个公式就是算最小外接矩形面积
return iou - (area_c - area_u) / area_c # GIoU的公式,
if DIoU or CIoU:
#c2就是欧式距离 加一个小偏置防止除数为0
c2 = torch.pow(con_br - con_tl, 2).sum(dim=2) + 1e-16
if DIoU:
#rho2 就是中心点距离 rho2 = ((bboxes_a[:, None, :2] - bboxes_b[:, :2]) ** 2 / 4).sum(dim=-1)
return iou - rho2 / c2 # DIoU 的计算公式 加了个中心点距离/欧氏距离
elif CIoU:
#这个V是长宽比
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w1 / h1).unsqueeze(1) - torch.atan(w2 / h2), 2)
with torch.no_grad():
alpha = v / (1 - iou + v)
return iou - (rho2 / c2 + v * alpha) # CIoU 可以看到比Diou多了个长宽比因素
return iou
如果对上述参数不了解,可以参考一下源代码,这里贴太多反而容易混淆
Loss function
CIOU懂了 那么CIOU loss呢
其实就是CIOU loss = (1-CIOU)
GIOU,CIOU等同理
那么yolo怎么计算loss的呢
偷一下cuijiahua大佬的图

很复杂 看不懂?
没关系 实际上就是 三个loss组成的
如果有物体 就要加上: 坐标框损失,置信度损失,分类类别损失
大概知道什么意思 然后去看代码就可以了: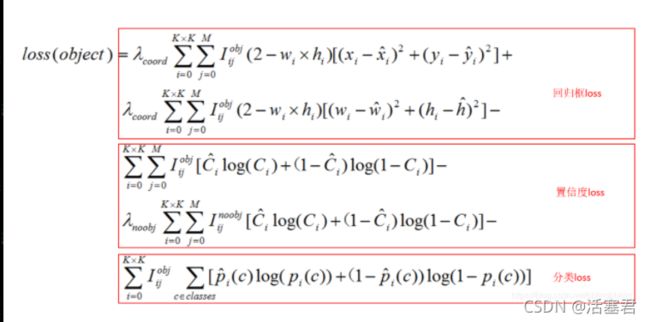
代码很长 可以只看我注释的地方 方便了解大体作用
class Yolo_loss(nn.Module):
def __init__(self, n_classes=80, n_anchors=3, device=None, batch=2):
super(Yolo_loss, self).__init__()
# 这些老参数了 看我上一章内容都有
self.device = device
self.strides = [8, 16, 32]
image_size = 608
self.n_classes = n_classes
self.n_anchors = n_anchors
self.anchors = [[12, 16], [19, 36], [40, 28], [36, 75], [76, 55], [72, 146], [142, 110], [192, 243], [459, 401]]
self.anch_masks = [[0, 1, 2], [3, 4, 5], [6, 7, 8]]
self.ignore_thre = 0.5
self.masked_anchors, self.ref_anchors, self.grid_x, self.grid_y, self.anchor_w, self.anchor_h = [], [], [], [], [], []
#遍历三个anchor框 这下面代码在之前都出现过 具体就是初始化那些anchor
for i in range(3):
all_anchors_grid = [(w / self.strides[i], h / self.strides[i]) for w, h in self.anchors]
masked_anchors = np.array([all_anchors_grid[j] for j in self.anch_masks[i]], dtype=np.float32)
ref_anchors = np.zeros((len(all_anchors_grid), 4), dtype=np.float32)
ref_anchors[:, 2:] = np.array(all_anchors_grid, dtype=np.float32)
ref_anchors = torch.from_numpy(ref_anchors)
# calculate pred - xywh obj cls
fsize = image_size // self.strides[i]
grid_x = torch.arange(fsize, dtype=torch.float).repeat(batch, 3, fsize, 1).to(device)
grid_y = torch.arange(fsize, dtype=torch.float).repeat(batch, 3, fsize, 1).permute(0, 1, 3, 2).to(device)
anchor_w = torch.from_numpy(masked_anchors[:, 0]).repeat(batch, fsize, fsize, 1).permute(0, 3, 1, 2).to(
device)
anchor_h = torch.from_numpy(masked_anchors[:, 1]).repeat(batch, fsize, fsize, 1).permute(0, 3, 1, 2).to(
device)
self.masked_anchors.append(masked_anchors)
self.ref_anchors.append(ref_anchors)
self.grid_x.append(grid_x)
self.grid_y.append(grid_y)
self.anchor_w.append(anchor_w)
self.anchor_h.append(anchor_h)
#基于anchor & center的目标构建方法,将预测结果转换到原图像尺度作为输入,遍历batchsize,通过计算预测结果与目标框的IoU,使obj_mask为0,屏蔽掉IoU较大又不是最大的区域,然后目标框的center构建目标target,通过tgt_scale动态调整不同大小目标框的训练权重,放大小尺度目标框偏差对训练的影响,降低大尺度目标框偏差对训练的影响
def build_target(self, pred, labels, batchsize, fsize, n_ch, output_id):
# 目标target最后一维是4 对应除p外的标签 也就是算IOU需要的4个:x、y、xx、yy
# (B,3,f,f,4) 这边的几个mask和scale都是后面数据处理用的 看后面就懂了
tgt_mask = torch.zeros(batchsize, self.n_anchors, fsize, fsize, 4 + self.n_classes).to(device=self.device)
# (B,3,f,f)
obj_mask = torch.ones(batchsize, self.n_anchors, fsize, fsize).to(device=self.device)
tgt_scale = torch.zeros(batchsize, self.n_anchors, fsize, fsize, 2).to(self.device)
target = torch.zeros(batchsize, self.n_anchors, fsize, fsize, n_ch).to(self.device)
# 下面的操作都是置信度数据的处理 主要是将预测结果转换到原图像尺度作为输入
nlabel = (labels.sum(dim=2) > 0).sum(dim=1) #有几个label
# label对应的是x,y,w,h 所以X=x+w,Y=y+h 说白了就是算置信框 这边加上了对应anchorbox的步长
truth_x_all = (labels[:, :, 2] + labels[:, :, 0]) / (self.strides[output_id] * 2)
truth_y_all = (labels[:, :, 3] + labels[:, :, 1]) / (self.strides[output_id] * 2)
truth_w_all = (labels[:, :, 2] - labels[:, :, 0]) / self.strides[output_id]
truth_h_all = (labels[:, :, 3] - labels[:, :, 1]) / self.strides[output_id]
truth_i_all = truth_x_all.to(torch.int16).cpu().numpy()
truth_j_all = truth_y_all.to(torch.int16).cpu().numpy()
#遍历batchsize
for b in range(batchsize):
n = int(nlabel[b])
if n == 0:
continue
truth_box = torch.zeros(n, 4).to(self.device)
truth_box[:n, 2] = truth_w_all[b, :n]
truth_box[:n, 3] = truth_h_all[b, :n]
truth_i = truth_i_all[b, :n]
truth_j = truth_j_all[b, :n]
# 就是计算iou的值了 其实bboxes_iou核心代码就是我文章最上面的IOU介绍,输入2个[N,4]维的置信框,返回IOU的值,所以这个anchor_ious_all就是所有置信框的IoU
anchor_ious_all = bboxes_iou(truth_box.cpu(), self.ref_anchors[output_id], CIoU=True)
# 得到iou最高的值 然后去匹配得到最好的anchorbox
best_n_all = anchor_ious_all.argmax(dim=1)
best_n = best_n_all % 3
best_n_mask = ((best_n_all == self.anch_masks[output_id][0]) |
(best_n_all == self.anch_masks[output_id][1]) |
(best_n_all == self.anch_masks[output_id][2]))
if sum(best_n_mask) == 0:
continue
truth_box[:n, 0] = truth_x_all[b, :n]
truth_box[:n, 1] = truth_y_all[b, :n]
# 获取每个batchsize中的最优先验框IOU,再标注其中大于阈值的张量 (最终会过滤掉)
pred_ious = bboxes_iou(pred[b].view(-1, 4), truth_box, xyxy=False)
pred_best_iou, _ = pred_ious.max(dim=1)
pred_best_iou = (pred_best_iou > self.ignore_thre)
pred_best_iou = pred_best_iou.view(pred[b].shape[:3])
# 这个mask就是用于把后面不满足阈值的值置空用的,屏蔽掉IoU较大又不是最大的区域
obj_mask[b] = ~ pred_best_iou
#用目标框center构建目标target,通过tgt_scale动态调整不同大小目标框的训练权重,放大小尺度目标框偏差对训练的影响,降低大尺度目标框偏差对训练的影响
for ti in range(best_n.shape[0]):
if best_n_mask[ti] == 1:
i, j = truth_i[ti], truth_j[ti]
a = best_n[ti]
obj_mask[b, a, j, i] = 1
tgt_mask[b, a, j, i, :] = 1
target[b, a, j, i, 0] = truth_x_all[b, ti] - truth_x_all[b, ti].to(torch.int16).to(torch.float)
target[b, a, j, i, 1] = truth_y_all[b, ti] - truth_y_all[b, ti].to(torch.int16).to(torch.float)
target[b, a, j, i, 2] = torch.log(
truth_w_all[b, ti] / torch.Tensor(self.masked_anchors[output_id])[best_n[ti], 0] + 1e-16)
target[b, a, j, i, 3] = torch.log(
truth_h_all[b, ti] / torch.Tensor(self.masked_anchors[output_id])[best_n[ti], 1] + 1e-16)
target[b, a, j, i, 4] = 1
target[b, a, j, i, 5 + labels[b, ti, 4].to(torch.int16).cpu().numpy()] = 1
tgt_scale[b, a, j, i, :] = torch.sqrt(2 - truth_w_all[b, ti] * truth_h_all[b, ti] / fsize / fsize)
return obj_mask, tgt_mask, tgt_scale, target
#这里主要是计算loss了,计算目标框偏差,置信度,类别的损失,可以看下上面的图片对照一下再看代码
def forward(self, xin, labels=None):
loss, loss_xy, loss_wh, loss_obj, loss_cls, loss_l2 = 0, 0, 0, 0, 0, 0
for output_id, output in enumerate(xin):
batchsize = output.shape[0]
fsize = output.shape[2]
n_ch = 5 + self.n_classes
output = output.view(batchsize, self.n_anchors, n_ch, fsize, fsize)
output = output.permute(0, 1, 3, 4, 2) # 如果内存不连续要加个.contiguous()
# xy, obj, cls加个sigmoid
output[..., np.r_[:2, 4:n_ch]] = torch.sigmoid(output[..., np.r_[:2, 4:n_ch]])
pred = output[..., :4].clone()
pred[..., 0] += self.grid_x[output_id]
pred[..., 1] += self.grid_y[output_id]
pred[..., 2] = torch.exp(pred[..., 2]) * self.anchor_w[output_id]
pred[..., 3] = torch.exp(pred[..., 3]) * self.anchor_h[output_id]
#build target就是上面的代码
obj_mask, tgt_mask, tgt_scale, target = self.build_target(pred, labels, batchsize, fsize, n_ch, output_id)
# 下面就是loss的计算方式了,注意:目标框偏差,置信度,类别使用二分类交叉熵损失,目标框位置采用平方差损失,四个损失加权求和得到最后的目标损失。
output[..., 4] *= obj_mask
output[..., np.r_[0:4, 5:n_ch]] *= tgt_mask
output[..., 2:4] *= tgt_scale
target[..., 4] *= obj_mask
target[..., np.r_[0:4, 5:n_ch]] *= tgt_mask
target[..., 2:4] *= tgt_scale
loss_xy += F.binary_cross_entropy(input=output[..., :2], target=target[..., :2],
weight=tgt_scale * tgt_scale, reduction='sum')
loss_wh += F.mse_loss(input=output[..., 2:4], target=target[..., 2:4], reduction='sum') / 2
loss_obj += F.binary_cross_entropy(input=output[..., 4], target=target[..., 4], reduction='sum')
loss_cls += F.binary_cross_entropy(input=output[..., 5:], target=target[..., 5:], reduction='sum')
loss_l2 += F.mse_loss(input=output, target=target, reduction='sum')
loss = loss_xy + loss_wh + loss_obj + loss_cls
return loss, loss_xy, loss_wh, loss_obj, loss_cls, loss_l2
然后你会发现,用了这个loss后就变成回归问题了
是不是很厉害,所以训练代码实际上就非常简单了:
我就贴个核心代码,其中很多log代码我都删了
#这边提一句 由于FRN层没有均值中心化,所以会有一些模型对初始学习率的选择十分敏感,
#特别是那些使用了多个最大池化层的网络。为了缓解这个问题,论文作者建议使用warm-up来对学习率进行调整。
#这边的burnin_schedule可以看下面
scheduler = optim.lr_scheduler.LambdaLR(optimizer, burnin_schedule)
#就是我们上面定义的yolo loss,四个loss相加
criterion = Yolo_loss(device=device, batch=config.batch // config.subdivisions, n_classes=config.classes)
model.train()
global_step = 0
for epoch in range(epochs):
epoch_step = 0
for i, batch in enumerate(train_loader):
global_step += 1
epoch_step += 1
images = batch[0]
bboxes = batch[1]
images = images.to(device=device, dtype=torch.float32)
bboxes = bboxes.to(device=device)
bboxes_pred = model(images)
loss, loss_xy, loss_wh, loss_obj, loss_cls, loss_l2 = criterion(bboxes_pred, bboxes)
loss.backward()
# 跑了一圈subdivisions才更新,所以GPU内存垃圾可以加这个subdivisions
if global_step % config.subdivisions == 0:
optimizer.step()
scheduler.step()
model.zero_grad()
#warm up learning
#这个写法比较老了 现在可以用torch.optim.lr_scheduler来写学习率预热
def burnin_schedule(i):
if i < config.burn_in:
factor = pow(i / config.burn_in, 4)
elif i < config.steps[0]:
factor = 1.0
elif i < config.steps[1]:
factor = 0.1
else:
factor = 0.01
return factor
至此 yolo的整体结构全部完成,还有部分残留的其他小技巧会在下一章全部介绍完