G2O (General Graph Optimization)入门及简单使用
g2o全称是General Graph Optimization,也就是图优化,我们在做SLAM后端或者更加常见的任何优化问题(曲线拟合)都可以使用G2O进行处理。
先放出本文的几个参考链接:
半闲居士(高翔博士)
非线性优化库g2o使用教程,探索一些常见的用法,以及信息矩阵、鲁棒核函数对于优化的结果的影响
g2o库简单入门
G2O结构介绍
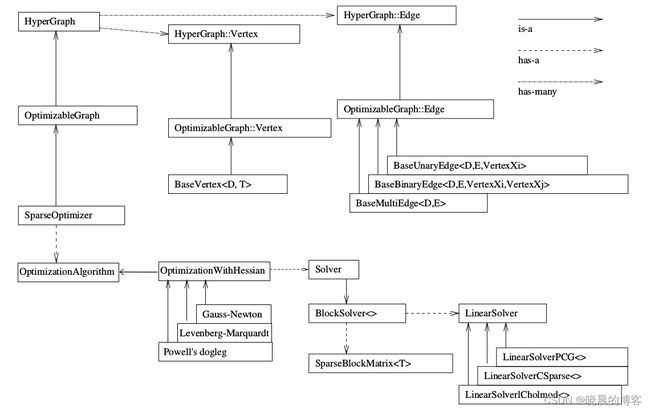
从SparseOptimizer开始看起,我们最终要使用的优化器就是它。它是一个Optimizable Graph,从而也是一个Hyper Graph。一个 SparseOptimizer 含有很多个顶点 (都继承自 Base Vertex)和很多个边(继承自 BaseUnaryEdge, BaseBinaryEdge或BaseMultiEdge)。这些 Base Vertex 和 Base Edge 都是抽象的基类,而实际用的顶点和边,都是它们的派生类。我们用 SparseOptimizer.addVertex 和 SparseOptimizer.addEdge 向一个图中添加顶点和边,最后调用 SparseOptimizer.optimize 完成优化。
在进行优化之前,需要指定我们用的求解器和迭代算法。从图中下半部分可以看到,一个 SparseOptimizer 拥有一个 Optimization Algorithm,继承自Gauss-Newton, Levernberg-Marquardt, Powell’s dogleg 三者之一(我们常用的是GN或LM、DL)。同时,这个 Optimization Algorithm 拥有一个Solver,它含有两个部分:
- 一个是 SparseBlockMatrix ,用于计算稀疏的雅可比和海塞矩阵;
- 一个是LinearSolver用于计算迭代过程中最关键的一步,添加状态改正量;
H △ x = − b . H△x = -b. H△x=−b.
准备数据
准备要进行拟合的数据,加上噪声:
int numPoints = 200;
double a = 1.;
double b = 2;
double c = 3;
Eigen::Vector2d *points = new Eigen::Vector2d[numPoints];
ofstream points_file("../points.txt", ios::out);
//准备用于拟合的数据 加上噪声
for (int i = 0; i < numPoints; ++i) {
double x = g2o::Sampler::uniformRand(0, 10);
double y = sin(a*x) + cos(b*x) + c;
y += g2o::Sampler::gaussRand(0, 0.1);
points[i].x() = x;
points[i].y() = y;
points_file << x << " " << y << endl;
}
points_file.close();
定义顶点与边
G2O已经给我们内置定义好了很多类型的顶点与边,但是我们在使用过程中可能要根据自己的需要重新定义。例如,我们想要求解一个曲线拟合优化的问题,曲线的真实方程为:
y = s i n ( a x ) + c o s ( b x ) + c . 其中 a = 1 , b = 2 , c = 3 y= sin(ax)+cos(bx)+c. 其中a = 1,b = 2,c=3 y=sin(ax)+cos(bx)+c.其中a=1,b=2,c=3
则针对这一问题,顶点为我们所需要求解的a,b,c,边就为预测值与观测值之间的差值。
- 构造顶点:
class VertexParams : public g2o::BaseVertex<3, Eigen::Vector3d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
VertexParams() = default;
bool read(std::istream & /*is*/) override {
cerr << __PRETTY_FUNCTION__ << " not implemented yet" << endl;
return false;
}
bool write(std::ostream & /*os*/) const override {
cerr << __PRETTY_FUNCTION__ << " not implemented yet" << endl;
return false;
}
//该函数作用是更新顶点的估计值
void setToOriginImpl() override {
cerr << __PRETTY_FUNCTION__ << " not implemented yet" << endl;
}
//更新优化之后的顶点
void oplusImpl(const double *update) override {
Eigen::Vector3d::ConstMapType v(update);
_estimate += v;
}
};
- 构造边:
/*!
* 从BaseUnaryEdge继承得到一元边
*/
class EdgePointOnCurve : public g2o::BaseUnaryEdge<1, Eigen::Vector2d, VertexParams> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgePointOnCurve() = default;
bool read(std::istream & /*is*/) override {
cerr << __PRETTY_FUNCTION__ << " not implemented yet" << endl;
return false;
}
bool write(std::ostream & /*os*/) const override {
cerr << __PRETTY_FUNCTION__ << " not implemented yet" << endl;
return false;
}
//边的误差计算
void computeError() override {
const VertexParams *params = dynamic_cast<const VertexParams *>(vertex(0));//顶点
const double &a = params->estimate()(0);
const double &b = params->estimate()(1);
const double &c = params->estimate()(2);
// double fval = a * exp(-lambda * measurement()(0)) + b;
double fval = sin(a * measurement()(0)) + cos(b * measurement()(0)) + c;
_error(0) = std::abs(fval - measurement()(1));
}
};
构建G2O优化器
g2o在使用过程中主要包括三种数据:
- 顶点:待优化的变量(状态)
- 边:顶点之间的约束关系,常用误差表示
- 求解器:线性方程求解器,从 PCG, CSparse, Choldmod中选,实际则来自 g2o/solvers 文件夹
因此,在g2o优化器定义过程中可以通过下述步骤实现:
g2o::SparseOptimizer optimizer;
// 优化器类型为LM
string solver_type = "lm_var";
// 优化器生成器
g2o::OptimizationAlgorithmFactory *solver_factory = g2o::OptimizationAlgorithmFactory::instance();
// 存储优化器性质
g2o::OptimizationAlgorithmProperty solver_property;
// 生成优化器
g2o::OptimizationAlgorithm *solver = solver_factory->construct(solver_type, solver_property);
optimizer.setAlgorithm(solver);
// 判断是否构建成功
if (!optimizer.solver()) {
std::cout << "G2O 优化器创建失败!" << std::endl;
}
设置初值,添加顶点与边
针对我们目前要求解的这一问题,顶点为我们所需要拟合的曲线系数a,b,c,边就为预测值(拟合出a,b,c之后代入公式计算的预测值)与观测值(生成的带噪声数据)之间的差值。
VertexParams *params = new VertexParams();
params->setId(0);
params->setEstimate(Eigen::Vector3d(0.7, 2.4, 2));//初始化顶点的估计值
// 添加顶点(待求解的a b c)
optimizer.addVertex(params);
for (int i = 0; i < numPoints; ++i) {
EdgePointOnCurve *e = new EdgePointOnCurve;
e->setInformation(Eigen::Matrix<double, 1, 1>::Identity());
e->setVertex(0, params);
e->setMeasurement(points[i]);
// 添加边
optimizer.addEdge(e);
}
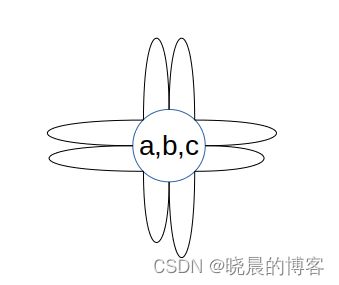
添加的顶点只有一个,边有很多条,其中,我们所使用的边为一元边,其链接的顶点只是一个。所构成的图如下所示:
优化
使用设置好的优化器进行优化:
optimizer.initializeOptimization();
optimizer.computeInitialGuess();
optimizer.computeActiveErrors();
optimizer.setVerbose(false);
optimizer.optimize(maxIterations);
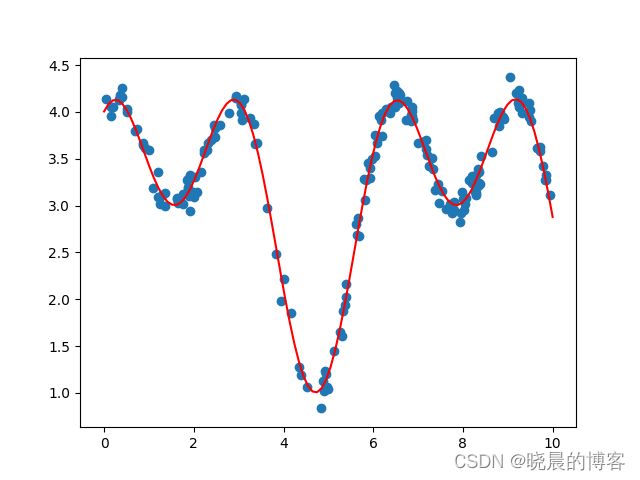
优化后的结果如下图所示,散点代表观测量,红色曲线为拟合的结果:
G2O优化源代码
#include ::Identity() * 10);
// }
e->setVertex(0, params);
e->setMeasurement(points[i]);
// g2o::RobustKernelHuber *robust_kernel_huber = new g2o::RobustKernelHuber;
// robust_kernel_huber->setDelta(0.1);
// e->setRobustKernel(robust_kernel_huber);
optimizer.addEdge(e);
}
optimizer.initializeOptimization();
optimizer.computeInitialGuess();
optimizer.computeActiveErrors();
optimizer.setVerbose(false);
optimizer.optimize(maxIterations);
ofstream result_file("../result.txt");
result_file << params->estimate()[0] << " "
<< params->estimate()[1] << " "
<< params->estimate()[2];
result_file.close();
cout << endl << "a, b, c: "
<< params->estimate()[0] << ", "
<< params->estimate()[1] << ", "
<< params->estimate()[2] << endl;
delete[] points;
return 0;
}
画图源代码
import numpy as np
import matplotlib.pyplot as plt
filename = './points.txt'
X, Y = [], []
with open(filename, 'r') as f:
lines = f.readlines()
for line in lines:
value = [float(s) for s in line.split()]
X.append(float(value[0]))
Y.append(float(value[1]))
result_name = './result.txt'
with open(result_name, 'r') as r:
lines = r.readlines()
for line in lines:
value = [float(s) for s in line.split()]
a = float(value[0])
b = float(value[1])
c = float(value[2])
x = np.linspace(0, 10, 100)
y = np.sin(a*x) + np.cos(b*x) + c
plt.plot(x, y, 'r')
plt.scatter(X, Y)
plt.show()