S-MJLs和网络动态系统的分析与综合
S-MJLs和网络动态系统的分析与综合【博士论文翻译】
Ji Huang 维多利亚大学.机械工程
摘要:
由微分方程或是差分方程控制的、不连续的物理过程,可以被建模为跳变系统。其中一类重要的跳变系统是离散事件间的线性演化的跳变系统;这类系统被称之为跳变线性系统。一种常用的分析方法是用随机过程的方法来描述离散事件的序列、开关和统计特性。这种跳变线性系统称为半马尔可夫跳变线性系统。由于跳变线性系统的性质,它在网络控制系统、容错控制系统以及其他易发生突变的系统中有很多应用。值得指出的是,当前研究得很好的马尔可夫跳变线性系统是半马尔可夫跳变线性系统的一个特例。
Physical processes which are governed by differential equations or difference equations with discontinuous behavior can be modeled as jump systems. An important type of jump systems is the one evolving linearly among the discrete events; this type of systems is called jump linear systems. A common analysis approach is to employ stochastic processes to describe the sequences, switches, and statistic properties of the discrete events. In this thesis, the jump linear systems to be studied are governed by semi-Markov processes. This type of jump linear systems is called the semi-Markov jump linear system. Due to the nature of the jump linear system, it finds many applications in networked control systems, fault tolerant control systems, and other systems subject to abrupt changes. It is worthwhile to mention that the well studied Markov jump linear system is a special case of the semi-Markov jump linear system.
论文主要包括两部分:半马尔可夫跳变线性系统和网络动态系统的分析与综合。在第2章和第3章,研究了半马尔可夫跳变系统的随机稳定性和最优控制问题。第4章则研究了基于半马尔可夫跳变线性系统的稳定性条件,提出了一种新的容错控制方案。在第5章到第7章则讨论了用跳变线性系统进行网络动态系统分析的方法。
The thesis consists of two parts: The analysis and synthesis of semi-Markov jump linear systems and networked dynamic systems. In Chapter 2 and Chapter 3, the stochastic stability and optimal control for semi-Markov jump linear systems with or without time delays are investigated. In Chapter 4, a novel fault tolerant control scheme is proposed based on the semi-Markov jump linear system stability conditions. Chapter 5 to Chapter 7 discuss the networked dynamic systems analysis via jump linear system approaches.
本文首先推导了半马尔可夫跳变线性系统的随机稳定性条件。利用李雅普诺夫理论,对李雅普诺夫函数进行无穷小变换,建立了改函数的充分稳定性条件。由于在实际应用中,几乎所有的系统模型都不能够被准确识别,因此在建立稳定性分析条件的基础上,研究了具有不确定性的系统的鲁棒性的问题。考虑到网络系统中不可避免的时滞的潜在应用,研究了时变时滞系统的最优控制。在容错控制设计中,利用半马尔可夫过程来描述寿命非指数分布的系统部件的时变故障率。并且所涉及的控制器能够在执行器发生故障时保持系统的稳定。
The stochastic stability conditions for semi-Markov jump linear systems are firstly derived. The Lyapunov theory is used to establish the sufficient stability conditions by deriving the infinitesimal generator of the Lyapunov function. Since in practice, almost all the system models could not be identified precisely, robust control prob- lems for systems with uncertainties are investigated based on the established stability conditions. Considering the potential applications on networked systems where time delays are inevitable, optimal control problems for systems with time-varying delays have been studied. In the fault tolerant control design, the semi-Markov process is ideal to characterize time-varying failure rates of the system components whose life time is not exponentially distributed. The designed controller is capable of maintain- ing the stability when an actuator malfunctions.
在网络控制的系统分析中,可以利用随机过程来建模时滞和传感器调度规则。通过考虑更多的历史信息或者计算所有未来可能发生的时滞,该网络的局限性得以改善。仿真和实验的结果均表明,所提出的控制方法能够改善控制性能。通过切换系统的方法,研究了一类网络化的处决感知系统。在触觉系统中,虚拟角色与虚拟环境中的多材料虚拟墙进行一维交互。通过随机过程模拟虚拟人物在墙壁上的随机运动轨迹,实现了多材料的虚拟墙壁绘制。
In the networked control system analysis, stochastic processes are used to model time delays and sensor scheduling rules. Network limitations are compensated by considering more historical information or planning for all possible delays that hap- pen in the future. Both simulations and experiments show the improvements of the control performance by using the proposed techniques. A networked haptic system is investigated via the switching system approach. In the haptic system, the avatar interacts one-dimensionally with a multi-material virtual wall in the virtual environ- ment. The random trajectory along which the avatar moves upon the wall is modeled by stochastic processes, then the multi-material virtual wall rendering is achieved.
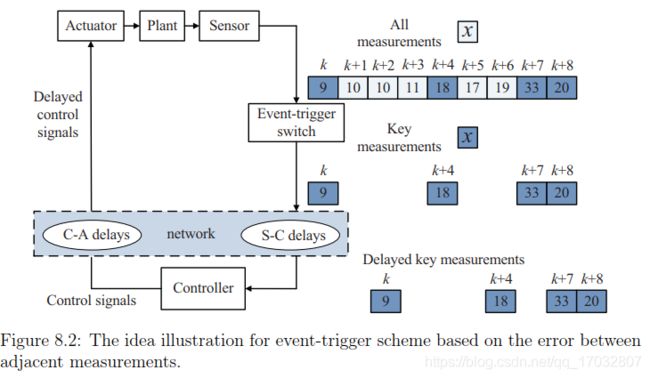
最后,对本文工作进行了总结,并提出了今后的研究方向。一是基于半马尔可夫过程建模的网络控制系统设计,二是基于网络动态系统的事件触发方案设计。
Finally, the thesis work is summarized and two future research topics are pro- posed. One is on the networked control system design where delays are modeled by semi-Markov processes, and the other one is on the event-trigger scheme design for networked dynamic systems.
1. 简介
1.1. 跳变线性系统
跳变线性系统,有时也被称作“混杂系统”,是由具有不连续的行为的微分方程活差分方程控制的实际动态系统或过程的数学模型。跳变系统由一组线性系统组成,整个系统在离散事件之间切换。假设离散事件间的动力学是线性的,因为:1)线性系统已经得到了很好的研究,并且在过去的几十年中有许多结果被报道;2)许多实际过程都可以在跳变线性系统的框架下很好地建模,如存在部件故障的系统和参数漂移的系统[4]。
Jump linear systems, sometimes referred to as hybrid systems, are mathematical models of the practical dynamic systems or processes that are governed by differential equations or difference equations with discontinuous behavior [3]. A jump linear system consists of a set of linear systems, and the overall system switches among discrete events. It is assumed that the dynamics between discrete events is linear, because 1) linear systems have been well studied and many results have been reported during the past decades; 2) many practical processes can be well modeled in the framework of jump linear systems, such as systems subject to component failures and systems with parameter shifting [4].
根据时域的不同,跳变线性系统可以分为:离散时间跳变系统和连续时间跳变系统。对这两类的综述如下:
Depending on different time domains, jump linear systems can be classified: Discrete- time jump linear systems and continuous-time jump linear systems. A review of the two categories is as follows.
对于离散时间的跳变线性系统,一种对于离散随机过程的常用处理方法是:假设过程切换发生在每个时间步长上。离散时间的伯努利跳变线性系统的应用已经被广泛报导了,尽管“伯努利切换系统”这一术语尚未被明确采用。例如,Gupta等人提供了[5]中的伯努利跳跃线性系统的一个例子,来自传感器的测量数据通过受伯努利分布失效影响的不可靠通信链路进行传输,因此它的闭环动力学表现出伯努利的开关模式。在伯努利过程中,它只允许两种可能的状态,取1或0。伯努利过程的这一固有特性与故障隔离和容错控制的本质相一致,在这种控制中,操作模式是“工作的”,但也存在“故障”。如果传输成功的概率为 ,传输失败的概率为
,传输失败的概率为 ,然后在闭环形式下的整个系统按照伯努利过程进行跳跃。这种类型的系统已经在故障隔离和容错控制[6]领域研究了几十年。
,然后在闭环形式下的整个系统按照伯努利过程进行跳跃。这种类型的系统已经在故障隔离和容错控制[6]领域研究了几十年。
For discrete-time jump linear systems, a popular treatment for the switching of the discrete-time stochastic process is to assume that the process switches at each time step. The applications of discrete-time Bernoulli jump linear systems have been reported extensively, though the terminology Bernoulli switching system was not explicitly adopted. For instance, Gupta et al. provided an example on the Bernoulli jump linear system in [5], where the measurements from sensors are transmitted through unreliable communication links subject to Bernoulli distributed dropouts; as a result, the closed-loop dynamics exhibits a Bernoulli switching pattern. In Bernoulli processes, it only allows two possible states, taking either 1 or 0. This intrinsic property of Bernoulli processes coincides with the nature of the fault isolation and fault tolerant control, where the operating modes are working and failure . If the probability of a successful transmission is p and the probability of an unsuccessful transmission is 1 p, then the overall system in the closed-loop form jumps according to a Bernoulli process. This type of systems has been studied for decades in the area of fault isolation and fault tolerant control [6].
对连续时间的跳变线性系统进行分析和综合是比较复杂的问题。连续时间系统的一些特征和特性不能直接与离散时间系统类比。一个很大的挑战在于:连续时间系统在运行过程中可能随时发生系统动力学的变化,而离散时间系统只能在特定的时间瞬间发生跳跃[7,8]。由于连续时间跳变线性系统既包括系统或过程的连续状态变量,如位移、速度或加速度,又包括控制过程的离散状态变量,因此,连续时间跳变线性系统有时也被称为混合系统。这种类型的混合系统可以用于模拟许多实际系统,如电力系统和太阳热中央接收器[9]。连续时间切换模型在稳定性分析和控制器设计方面带来了许多好处。在[10]中,采用马尔可夫过程模拟垂直起降(VTOL)飞机;因此,建立了一个限制性较小的稳定性条件。
The analysis and synthesis of continuous-time jump linear systems are more com- plicated and mathematically involved. Some features and characteristics in continuous- time systems do not have direct analogies to discrete-time systems. A big challenge lies in that the variations of the system dynamics may occur at any time during the operation in continuous-time systems, while discrete-time systems could only jump at specific time instants [7, 8]. Since both continuous state variables of a plant or a pro- cess, such as displacement, velocity, or accelerations, and discrete state variables of the governing processes co-exist, continuous-time jump linear systems are sometimes called hybrid systems . This type of hybrid systems can be employed to model many practical systems, such as, electrical power systems and the solar thermal cen- tral receiver [9]. The continuous-time switching model has brought in many benefits in the stability analysis and controller design. In [10], the Markov process has been employed to model a vertical take-off and landing (VTOL) aircraft; consequently, a less restrictive stability condition was established.
跳变线性系统的另外的分类则是基于潜在的随机过程。根据随机过程的不同,跳变线性系统可以分为伯努利跳变线性系统、马尔可夫线性系统(MJSs)、半马尔可夫线性系统(S-MJLSs)以及其它跳变线性系统。所以,系统的整体特性和动力学高度依赖于随机过程的随机特性。在所有类型的跳变线性系统中,MJLS在控制群体中得到了深入的研究[11,12,13]。有两个主要原因使我们使用马尔可夫过程而不是伯努利过程。首先,在NCS的分析中,传输延迟可以用随机过程的模态来表示;对于具有时变时延的网络控制系统(NCS),通常需要对两种或两种以上的时延进行建模和表示。马尔可夫过程,即使是有限状态的马尔可夫过程,能够处理两种或两种以上的工作模式。其次,跳变线性系统的未来状态通常依赖于当前状态。以天气系统为例。它可以看作是一个跳变系统,其中模式代表天气的状态,即晴天和雨天;在世界上的一些地区,如果今天是晴天,明天就会倾向于是晴天,反之亦然。伯努利随机变量不适合描述预测和当前状态之间的关系,而马尔可夫过程能够根据当前状态预测未来步骤中的状态,从而引起人们的注意。MJLSs的研究始于20世纪60年代,当时Dynkin首次导出了具有Markov切换模式[14]的微分系统的无穷小算子。在研究了马尔可夫过程之后,再研究半马尔可夫过程的动机是双重的。首先,马尔可夫过程是半马尔可夫过程的一个特例。其次,利用半马尔可夫过程可以更好地捕捉大量系统行为。第2章、第3章、第4章进行了详细的解释和分析。
Other classifications of jump linear systems are based on the underlying stochastic processes. Depending on the governing stochastic processes, jump linear systems can be classified as Bernoulli jump linear systems, Markov jump linear systems (MJLSs), semi-Markov jump linear systems (S-MJLSs), and other jump linear systems. As a result, the characteristics and system dynamics highly depend on the properties of the underlying stochastic processes. Among all types of jump linear systems, the MJLS has been intensively investigated in the control community [11, 12, 13]. Two main reasons have motivated the use of Markov processes instead of Bernoulli processes. Firstly, in the analysis of NCSs, the transmission delays could be represented by the modes of stochastic processes; for networked control systems (NCSs) with time- varying delays, usually two or more delays need to be modeled and represented. Markov processes, even finite-state Markov processes, are able to handle two or more operating modes. Secondly, the future states of jump linear systems usually depend on the current state. Take the weather system for an example. It can be regarded as a jump system where the mode represents the status of the weather, i.e., sunny and rainy; in some areas around the world, it tends to be sunny tomorrow if today is sunny, and vice versa. A Bernoulli random variable is not suitable for characterizing the relation between the prediction and the current state, whereas Markov processes draw attention with the ability to predict the states in future steps based on the current state. The study of MJLSs started in 1960s when Dynkin firstly derived the infinitesimal operators for differential systems with Markov switching patterns [14]. The motivations on the study of semi-Markov process after the study of Markov process are two-fold. Firstly, the Markov process is a special case of the semi-Markov process. Secondly, lots of system behavior could be better captured by semi-Markov process. Detailed explanations and analysis are given in Chapters 2, 3, and 4.
跳变线性系统的稳定性分析结果已经在[18]中得到了总结。稳定性分析的早期工作源于[19]。近年来,随着优化技术和编程工具的快速发展,许多稳定性问题被转化为可以用线性矩阵不等式(LMIs)求解的优化问题[20,21]。在已有的稳定性分析结果的基础上,研究者的注意力转向了跳跃线性系统的控制设计问题。1990年,Ji等对连续时间MJLSs[22]的能控性和稳定性进行了分析,构造了新的可控性、可观测性、可稳定性和可检测性的定义。[22]的另一个贡献是构造了一个既充分又必要的稳定性条件。
The stability analysis results of jump linear systems have been summarized in a comprehensive survey [18]. Early work on the stability analysis stems from [19]. In recent years, with the fast development of optimization techniques and programming tools, lots of stability problems have been converted to optimization problems which could be solved by linear matrix inequalities (LMIs) [20, 21]. With the established results on the stability analysis, researchers attention has shifted to the control de- sign problems of jump linear systems. In 1990, Ji et al. analyzed the controllability and the stabilizability of continuous-time MJLSs [22], where new definitions for con- trollability, observability, stabilizability, and detectability were constructed. Another contribution of [22] is to construct a stability condition which is not only sufficient but also necessary.
遵循给定的稳定性条件,研究人员一直在追求控制性能的改善。最优控制在数学上是一个最小化问题,在这个问题中,为了满足特定的目标,需要计算出不同的最优解。这些目标通常被称为性能指标或标准,根据这些指标可以提出各种最优控制方案。早在1969年[7]就报道了MJLSs最优控制的研究,其中控制性能在二次意义上进行了优化。自20世纪80年代以来,随着![]() 理论的发展,为垂直起降飞行器[10]设计了跳跃线性系统的
理论的发展,为垂直起降飞行器[10]设计了跳跃线性系统的![]() 最优控制器;最优控制问题被表述为LMI优化问题,该问题很容易用Matlab中的LMI控制工具箱[23]求解。在[10]中,提出了另一种流行且应用广泛的最优控制算法——
最优控制器;最优控制问题被表述为LMI优化问题,该问题很容易用Matlab中的LMI控制工具箱[23]求解。在[10]中,提出了另一种流行且应用广泛的最优控制算法—— 控制算法。于最优控制系统的其他结果可以在[24]及其文献中找到。除了上述系统在理想条件下运行外,通常状态变量和控制信号都受到物理限制,如操作工作空间限制或执行器的最大功率限制,因此在[25]中研究了有约束的最优控制问题。在本论文中,我们讨论了具有延迟的MJLSs和网络直流电机系统的
控制算法。于最优控制系统的其他结果可以在[24]及其文献中找到。除了上述系统在理想条件下运行外,通常状态变量和控制信号都受到物理限制,如操作工作空间限制或执行器的最大功率限制,因此在[25]中研究了有约束的最优控制问题。在本论文中,我们讨论了具有延迟的MJLSs和网络直流电机系统的![]() 和控制器。
和控制器。
Following the established stability conditions, researchers have always been pur- suing improvement in control performance. Optimal control is mathematically a minimization problem, in which different optima are calculated for meeting specific goals. These goals are often called performance indexes or criteria, according to which various optimal control schemes could be proposed. An early work on optimal control of MJLSs was reported in 1969 [7], where the control performance is optimized in the quadratic sense. With the development of the H theory since 1980s, H optimal controllers for jump linear systems were designed for a VTOL vehicle [10]; the opti- mal control problem has been formulated as an LMI optimization problem, which is readily solvable by using Matlab LMI Control Toolbox [23]. In [10], another popular and widely applied optimal control algorithm, H2 control algorithm, was proposed. Other results on H2 optimal control systems could be found in [24] and the references therein. Aside from the aforementioned systems operating under ideal conditions, often the state variables and control signals are constrained by physical limitations, such as operating work space limitations or the maximal power of the actuator, so optimal control problems with constraints were examined in [25]. In this thesis, the H and H2 controllers for MJLSs with delays and for a networked DC motor system are discussed.
在上述所有工作中,,系统动力学总是被假定为设计者和操作者确切知道,但在实践中并非总是如此,这是由于系统识别挑战或由于基于不同假设获得的不同系统动力学。为了解决系统参数不确定的问题,提出了鲁棒控制理论。文献中主要研究了两种类型的模型不确定性:多面体不确定性和范数有界不确定性。对于多面体不确定性,假设系统参数属于多面体顶点的凸集。用多面体来描述模型不确定性的优点是,所得到的系统可以用一组线性定常(LTI)系统的线性组合来表示;使用多面体类型表示的缺点是,随着多面体顶点数的增加,计算量会显著增加。在[26]中研究了一类具有多面体不确定性的跳跃线性系统的鲁棒稳定性和控制问题。进一步,de Souza报告了跳变线性系统的稳定性分析和控制设计问题,其中多面体不确定性不仅考虑了系统动力学,而且考虑了[27]中随机过程的参数。另一种方法是使用范数有界矩阵来刻画模型的不确定性。在这种方法中,扰动被限制在一个特定的度量[28]中预定的单位球内。以具有范数有界不确定性的跳跃线性系统为例,在[29]及其文献中研究了该系统的稳定性和控制问题。
In all the aforementioned work, the system dynamics is always assumed to be ex- actly known to the designer and the operator, which is not always the case in practice, due to the system identification challenges or because of different system dynamics obtained based on different assumptions. In order to tackle the problem of uncer- tain system parameters, the robust control theory has been developed. Two types of model uncertainties are mainly examined in the literature: Polytopic uncertainties and norm-bounded uncertainties. For polytopic uncertainties, the system parameters are assumed to belong to convex sets of polytopic vertices. The advantage of us- ing a polytope to describe model uncertainties is that the resulting system could be represented by a linear combination of a set of linear time-invariant (LTI) systems; the disadvantage of using the polytopic type representation is that the computational load would increase significantly with the increase of the polytope vertex number. Ro- bust stability and control problems for a class of jump linear systems with polytopic uncertainties were examined in [26]. Moving one step further, de Souza reported the stability analysis and control design problems for jump linear systems where polytopic uncertainties were not only considered for system dynamics but also for the parame- ters of the stochastic processes in [27]. The other approach is to use norm-bounded matrices to characterize the model uncertainties. In this approach, the perturbations are confined within a predetermined unit ball in a particular metric [28]. For example, the stability and control for jump linear systems with norm-bounded uncertainties were studied in [29] and the references therein.
研究具有非马尔可夫跳变的更一般的随机系统,自然要放宽马尔可夫过程所引入的假设。在跳跃线性系统中,两次连续跳跃之间的持续时间 称为逗留时间,它通常是一个随机变量[30]。在连续时间跳变线性系统中,逗留时间是一个由连续概率分布
称为逗留时间,它通常是一个随机变量[30]。在连续时间跳变线性系统中,逗留时间是一个由连续概率分布 控制的随机变量。例如,在连续时间MJLS中是一个指数分布。逗留时间不服从指数分布的连续随机过程称为连续半马尔可夫过程。因此,将参数按半马尔可夫过程切换的跳变线性系统称为S-MJLS[1]。在[1]中得到了S-MJLS控制器设计的一个稳定条件,其中采用MJLS稳定条件设计控制器。虽然在串列腔相互作用系统上验证了这一条件,但逗留时间分布近似为指数分布,说明S-MJLS近似为MJLS,且在控制器设计中没有考虑过渡速率的时变信息。Hou等人研究了具有半马尔可夫跳变参数的线性系统的随机稳定性,得到了与Markov跳变系统[31]类似的结果。在[31]中,由于所有概率分布在
控制的随机变量。例如,在连续时间MJLS中是一个指数分布。逗留时间不服从指数分布的连续随机过程称为连续半马尔可夫过程。因此,将参数按半马尔可夫过程切换的跳变线性系统称为S-MJLS[1]。在[1]中得到了S-MJLS控制器设计的一个稳定条件,其中采用MJLS稳定条件设计控制器。虽然在串列腔相互作用系统上验证了这一条件,但逗留时间分布近似为指数分布,说明S-MJLS近似为MJLS,且在控制器设计中没有考虑过渡速率的时变信息。Hou等人研究了具有半马尔可夫跳变参数的线性系统的随机稳定性,得到了与Markov跳变系统[31]类似的结果。在[31]中,由于所有概率分布在![]() 上的相型分布的密度性质,首先定义了相型半马尔科夫过程,并讨论了具有相型半马尔科夫跳变参数的简单线性系统的稳定性。
上的相型分布的密度性质,首先定义了相型半马尔科夫过程,并讨论了具有相型半马尔科夫跳变参数的简单线性系统的稳定性。
To investigate the more general stochastic systems with non-Markov jumps, it is natural to relax the assumptions introduced by the Markov process. In a jump linear system, the duration h between two consecutive jumps is called sojourn-time, which is usually a random variable [30]. In continuous-time jump linear systems, the sojourn-time h is a random variable governed by the continuous probability distribu- tion F . For instance, F is an exponential distribution in the continuous-time MJLS. The continuous stochastic process whose sojourn-time does not follow an exponen- tial distribution is referred to as a continuous semi-Markov process. Accordingly, the jump linear system whose parameters switch according to a semi-Markov process is termed as an S-MJLS [1]. A stability condition for the S-MJLS controller design was obtained in [1] where the MJLS stability condition was adopted to design the controller. Although the condition was verified on a bunch-train cavity interaction system, the sojourn-time distribution was just nearly exponential , which indicated that the S-MJLS was nearly MJLS and the time-varying information of the transition rate was not considered in the controller design. Hou et al. addressed the stochastic stability for the linear system with semi-Markov jump parameters and similar results have been obtained as those in Markov jump systems [31]. In [31], due to the density property of phase-type distributions of all probability distributions on [0, + ), the phase-type semi-Markov process was firstly defined and the stability of simple linear systems with phase-type semi-Markov jump parameters was addressed.
1.2. 网络控制系统
NCSs指的是执行器、传感器和控制器空间分布的控制系统。近几十年来,对NCS的研究越来越受到人们的关注。在控制领域,许多特殊问题在科学期刊出版存在的,例如,IEEE Transactions on Automatic Control Guest Editorial Special Issue on Networked Control Systems (2004),Proceedings of the IEEE Special Issue on Technology of Networked Control Systems (2007), International Jour- nal of Systems, Control and Communications Special Issue on Progress in Networked Control Systems (2011), IEEE Transactions on Industrial Informatics Special Section on Advances in Theories and Industrial Applications of NCSs (2012)。此外,NCS也在许多研究研讨会中被介绍和讨论,例如,Workshop on Networked Embedded Sensing and Control (2005 USA),Global Centers of Excellence Workshop on Networked Control Systems (2008 Japan),以及First International Workshop on Wireless Networked Control Systems (2011 Canada)。此外,控制界的两大旗舰会议IEEE Conference on Decision and control (IEEE-CDC)和American control Conference (ACC)也举办了许多关于NCSs的专题会议。2012年,IEEE-CDC和ACC分别组织了5个和6个网络控制系统专题。
NCSs are control systems where actuators, sensors, and controllers are spatially dis- tributed. The research on NCSs has attracted increasing attention in the past decades. In the control community, many special issues in scientific journals have been published on NCSs, for example, IEEE Transactions on Automatic Control Guest Editorial Special Issue on Networked Control Systems (2004), Proceedings of the IEEE Special Issue on Technology of Networked Control Systems (2007), International Journal of Systems, Control and Communications Special Issue on Progress in Networked Control Systems (2011), and IEEE Transactions on Industrial Informatics Special Section on Advances in Theories and Industrial Applications of NCSs (2012). Also, the NCS has been introduced and discussed in a lot of research workshops, for example, Workshop on Networked Embedded Sensing and Control (2005 USA), Global Centers of Excellence Workshop on Networked Control Systems (2008 Japan), and First International Workshop on Wireless Networked Control Systems (2011 Canada). In addition, the two flagship conferences in the control community, IEEE Conference on Decision and Control (IEEE-CDC) and American Control Conference (ACC), have been holding many special sections on NCSs. In 2012, IEEE-CDC and ACC organized five and six Special Sections on Networked Control Systems , respectively.
NCS与传统控制系统的区别在于系统组件之间的信号通道。传统的形式假设所有组件通过理想的通道相互连接[32,33]。理想的链路/连接不限制传输时间、带宽,也不限制数据丢失或错误数据等传输故障。在实际应用中,分布式组件控制系统已广泛应用于化工流程[34]、车辆间移动传感器网络[35]、远程手术[36]、植物监控[37]、航天器[38]、无人机[39]等多个领域。在这些应用中,控制信号和传感器输出分别通过各种通信网络传输到执行器和控制器。
The NCS differs from the traditional control systems on signal channels between system components. Traditional formulations assume that all components are inter- connected by ideal channels [32, 33]. The ideal link/connection puts no limitations on the transmission time, bandwidth, nor transmission faults such as data missing or wrong data. In practice, control systems with distributed components have existed in many fields such as chemical processes [34], mobile sensor networks among ve- hicles [35], tele-surgeries [36], plant monitoring [37], spacecrafts [38], and unmanned aerial vehicles [39]. In those applications, control signals and sensor outputs are trans- mitted over various communication networks to the actuator and to the controller, respectively.
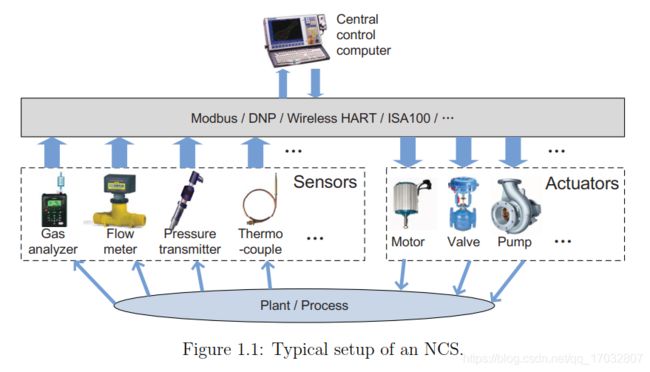
一个典型的NCS如图1.1所示。可以看到,工厂/过程的状态是由各种传感器测量的,如气体分析仪,流量计,压力变送器,热电偶。传感器通过Modbus、DNP、WirelessHART和ISA100等控制网络向中央控制计算机发送测量数据。控制算法在中央控制计算机中实现。中央控制计算机计算出的控制动作被发送到不同的执行机构;可能的执行机构有电机、阀门和泵等。
A typical NCS diagram is shown in Figure 1.1. As can be seen, the states of the plant/process are measured by various sensors, such as gas analyzers, flow meter- s, pressure transmitters, and thermocouples. The sensors send measurements to the central control computer via control networks, such as Modbus, DNP, WirelessHART, and ISA100. The control algorithm is implemented in the central control comput- er. Control actions calculated by the central control computer are sent to different actuators; possible actuators are motors, valves, and pumps, etc.
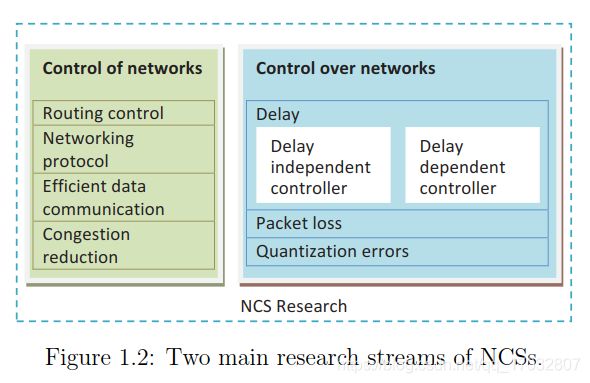
如图1.2所示,研究NCSs的两个主要研究方向是:1)网络的控制,2)基于网络的控制。
As indicated in Figure 1.2, two main research streams on studying NCSs are: 1) Control of networks, and 2) control over networks.
1)“网络的控制”集中在网络本身的性质上;例如,比特率,带宽,协议设计等。传感器网络的研究成果也已应用到NCS研究[40]中。在过程控制和自动化行业,改进现有的NCSs无线协议正在被广泛研究。需要指出的是,这类研究属于传播和网络研究领域。
1)Control of networks concentrates on the property of the network itself; for example, the bit rate, the bandwidth, the protocol design and so on. The re- search results from sensor networks have also been applied to NCS studies [40]. In the process control and automation industry, improvements on current wire- less protocols for NCSs are being extensively studied [41]. It should be pointed out that this type of research falls into the communication and network research fields.
2)“基于网络的控制”重点是为NCSs设计的控制策略,其中为NCSs选择了特定的通信协议。在工程应用中,由于现有设备、成本考虑或环境问题,只能使用特定的通信协议。因此,系统设计者应自定义控制律或策略以适应网络的约束。这类研究属于系统控制领域。值得一提的是,NCSs的网络与控制器协同设计有一种共同的趋势[42,43,44]。
2)Control over networks focuses on the control strategy design for NCSs where particular communication protocols have been selected for NCSs. In engineering applications, due to the existing devices, cost consideration, or environmental concerns, only specific communication protocols could be used. Therefore, the system designer should customize the control laws or strategies to accommo- date network constraints. This type of research falls into the system control community. It is worth mentioning that there is a trend in the co-design of the network and controller for NCSs [42, 43, 44].
空间的分布式特点为NCSs带来几个优势:1)减少布线;2)易于安装,诊断和维护;3)低成本;4)有效信息共享[45]。有了这些特性,NCSs就可以用更少的冗余电线来实现,甚至可以利用工业无线网络来实现无电线;简单的安装提高了系统的灵活性,例如,其它组件可以模块化安装,故障组件可以在不关闭整个系统的情况下更换。优势与挑战并存。介绍的网络局限性主要在于:1)时间延迟;2)数据包丢失;3)采样和量化错误;4)带宽限制[45]。在这些挑战中,对模拟转数字和数字转模拟的转换计算机控制系统的采样和量化问题进行了研究;在采样数据控制系统中,研究了降低采样速率的带宽限制。因此,时延和丢包成为系统设计中的主要问题。为了解决这两个问题,在通信领域,针对远程操作任务开发了新的internet传输协议;同时,在控制领域中提出了保证NCSs稳定性和一定性能指标的新方法。在这篇论文中,我们也将关注时间延迟和丢包问题。
The spatial distribution property brings in several advantages for NCSs: 1) Re- ducing wirings, 2) ease of system installation, diagnosis, and maintenance, 3) low cost, and 4) sharing data effectively [45]. With these features, NCSs would be implemented with less redundant wires, or even no wires by utilizing industrial wireless networks the easy installation enhances the system agility, for example, additional components could be installed modularly, and failed components could be replaced without shut- ting down the whole system. Challenges come along with the advantages. The major constraints caused by the introduced network are: 1) Time delays, 2) packet dropouts, 3) sampling and quantization errors, and 4) bandwidth limitations [45]. Among those challenges, sampling and quantization issues have been studied for computer control systems with analog-to-digital and digital-to-analog conversions; bandwidth limita- tion which slows down the sampling rate has been studied in sampled-data control systems. Therefore, time delays and packet dropouts become the major concerns in the system design. To deal with these two issues, in the communication community, new internet transport protocols were developed for teleoperation tasks; meanwhile, new methods that can guarantee the stability and certain performance criteria for NCSs were proposed in the control community. In this thesis, we will also focus on the time delay and packet dropout issues.
近年来,由于闭环NCSs可以用开关系统来建模,因此采用随机系统的方法来研究NCSs已成为一种趋势。在20世纪90年代,Nilsson使用Markov链[46]建立了具有延迟的实时控制系统的模型。根据Nilsson的论文,最初的想法是用跳跃线性系统对延迟系统建模;给出了利用马尔可夫链建模时滞的原因,并给出了一些初步的结果。在Nilsson的工作之后,Xiao等人用有限维离散时间跳变线性系统[47]建模了具有随机但有界时间延迟的控制系统。基于Nilsson和Xiao等人的研究结果,对NCSs提出了多种方法[24,48,49,50]。时序机制和设计方法的回顾如下。
During the past years, there was a trend to employ the stochastic system approach to study NCSs, because closed-loop NCSs can be modeled by switching systems. In the 1990s, Nilsson modeled the real-time control system with delays using Markov chains [46]. According to Nilsson s thesis, the original idea was to model the delayed system using jump linear systems; the reasons of using Markov chains to model delays were provided and some preliminary results were reported. After Nilsson s work, Xiao et al. modeled the control systems with random but bounded time delays by finite- dimensional, discrete-time jump linear systems [47]. Based on Nilsson s and Xiao et al. s results, various approaches have been proposed for NCSs [24, 48, 49, 50]. The timing mechanism and design approaches are reviewed as follows.
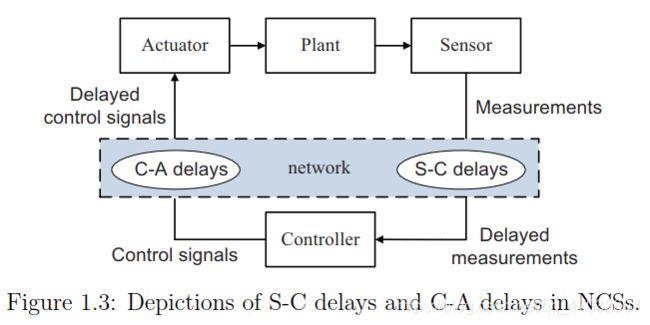
网络控制系统的定时机制是系统稳定性分析和控制策略设计的核心内容。两个通信链路涉及到定时机制:传感器到控制器(S-C)链路和控制器到执行器(C-A)链路。在每个通信链路中,传输的数据包可能会受到延迟或退出的影响。这种现象将显著改变系统动力学[51]。图1.3描述了这两种延迟。一个常用的假设是延迟是有上限的,在这种情况下数据包丢失可以在延迟框架[52]中解决。如果所设计的控制器忽略了延迟造成的影响,这种类型的控制器通常被称为模式无关控制器[53]。同样地,考虑单侧延迟和双侧延迟的控制器分别称为“单模相关控制器”和“双模相关控制器”。在控制器设计中,考虑更多的延迟信息将从直观和理论上提高[47]的控制性能。
The timing mechanism of NCSs is the core aspect in the stability analysis and the control strategy design. Two communication links are involved with the timing mechanism: The sensor-to-controller (S-C) link, and the controller-to-actuator (C-A) link. In each communication link, the transmitted data packages may be subject to delays or dropouts. Such phenomenon would significantly alter the system dynam- ics [51]. The two delays are depicted in Figure 1.3. A commonly used assumption is that the delay is upper bounded, and in such cases the packet dropout could be addressed in the delay framework [52]. If the designed controller ignores the effects caused by delays, this type of controller is often termed as the mode-independent controller [53]. Similarly, controllers considering one or two side delays, are called one-mode dependent controllers or two-mode dependent controllers , respectively. In the controller design, taking more delay information into consideration would improve the control performance both intuitively and theoretically [47].
S-C延迟相对比较容易处理,因为控制器可以在控制信号计算中补偿S-C延迟。补偿已经通过许多途径实现。在[47]中,针对传输延迟采用有限状态离散马尔可夫过程建模的网络控制系统,设计了模态无关控制器和单模态相关控制器。此外,Seiler等人基于有界实数引理[50]建立了考虑S-C时滞的![]() 最优控制器。一个早期处理C-A通信链路的工作是通过引入了缓冲区来处理C-A包的丢失[54]。为了研究C-A延迟,我们做了一些强有力的假设。例如,在给定当前S-C延迟和C-A前一步延迟的情况下,在每个采样瞬间[55],控制器都可以访问双模相关控制器。然而,控制器可能并不总是可以访问C-A之前的那一步。事实上,当控制器接收并计算一步前的延迟信息将依赖于S-C延迟。对于S-C和C-A延迟之间的关系,在[53]中可以找到一个完整的解释,其中设计了一个考虑双侧延迟的输出反馈控制器。考虑到模型的不确定性,在[56]中研究了混合
最优控制器。一个早期处理C-A通信链路的工作是通过引入了缓冲区来处理C-A包的丢失[54]。为了研究C-A延迟,我们做了一些强有力的假设。例如,在给定当前S-C延迟和C-A前一步延迟的情况下,在每个采样瞬间[55],控制器都可以访问双模相关控制器。然而,控制器可能并不总是可以访问C-A之前的那一步。事实上,当控制器接收并计算一步前的延迟信息将依赖于S-C延迟。对于S-C和C-A延迟之间的关系,在[53]中可以找到一个完整的解释,其中设计了一个考虑双侧延迟的输出反馈控制器。考虑到模型的不确定性,在[56]中研究了混合![]() 控制问题。单模相关控制器和双模相关控制器都与缓冲器型驱动器一起工作。有了这样的执行器,只有来自控制器的最新的控制信号才会被执行到平台上。执行器本身没有任何智能评估基于延迟信息的控制信号或对检测到的C-A延迟作出适当补偿。控制器可以很容易地补偿S-C延迟背后的原理是,控制器可以立即测量最新的S-C延迟;类似地,执行器是补偿C-A延迟的理想系统组件,因为执行器可以立即确定C-A延迟一旦发生。剩下的任务是开发智能执行器和相应的控制策略,这将在本文后面讨论。
控制问题。单模相关控制器和双模相关控制器都与缓冲器型驱动器一起工作。有了这样的执行器,只有来自控制器的最新的控制信号才会被执行到平台上。执行器本身没有任何智能评估基于延迟信息的控制信号或对检测到的C-A延迟作出适当补偿。控制器可以很容易地补偿S-C延迟背后的原理是,控制器可以立即测量最新的S-C延迟;类似地,执行器是补偿C-A延迟的理想系统组件,因为执行器可以立即确定C-A延迟一旦发生。剩下的任务是开发智能执行器和相应的控制策略,这将在本文后面讨论。
The S-C delay is relatively easy to deal with, since the controller could compen- sate for the S-C delay in the control signal calculation. The compensation has been achieved through many approaches. In [47], both the mode-independent controller and the one-mode dependent controller were designed for NCSs where transmission delays were modeled by finite-state discrete-time Markov processes. Furthermore, Seiler et al. have built an H optimal controller considering the S-C delays based on the bounded real lemma [50]. An early work dealing with the C-A communication link introduced buffers to handle the C-A packet dropouts [54]. To study the C-A delays, some strong assumptions were made. For instance, a two-mode dependent controller was developed given that the current S-C delay and the one step previous C-A delay were accessible by the controller at every sampling instant [55]. Howev- er, the one step previous C-A delay may not always be accessible by the controller. Indeed, when the controller receives and calculates the one step previous delay infor- mation will depend on the S-C delays. A thorough explanation regarding the relation between S-C and C-A delays could be found in [53], where an output feedback con- troller was designed considering two side delays. By taking the model uncertainties into account, the mixed H2/H control problems were examined in [56]. Both one- mode dependent controllers and two-mode dependent controllers are working with a buffer type actuator. With such actuators, only the most recent control signal from the controller will be implemented on the plant. The actuator by itself does not have any intelligence on evaluating the control signals based on the delay information or making appropriate compensations for the detected C-A delays. The rationale behind which the controller could easily compensate for the S-C delay is that the controller could immediately measure the most updated S-C delay; analogously, the actuator is the ideal system component to compensate for the C-A delays, because the actuator could immediately determine the C-A delay once it happens. The remaining tasks are to develop smart actuators and to adapt control strategies accordingly, which will be discussed later in this thesis.
本文的研究方法主要是基于李雅普诺夫理论,或者说是基于李雅普诺夫理论的推论。在讨论伯努利过程或半马尔可夫过程下系统切换的稳定性之前,先对任意切换系统的稳定性分析做一个简要的回顾。研究表明,即使所有子系统都是稳定的,任意切换系统也不一定是稳定的。只有在某些特殊情况下,如子系统状态空间模型的矩阵是对称的[57],或子系统是成对交换的[58]时,各子系统的稳定性才成为整个系统稳定的充分条件。然而,所有子系统存在一个共同的李雅普诺夫函数,能够保证在任意切换[59]时的整体稳定性。然而,所有子系统存在一个共同的李雅普诺夫函数,能够保证在任意切换[59]时的整体稳定性。随着LMI工具箱[28]和YALMIP[60]等数字工具箱的发展,通过切换系统方法得到了大量的NCSs结果。文献[61]为NCSs设计了一个控制器;所研究的网络控制系统容易受到网络引起的数据包丢失和时变时延的影响。在构造的公共李雅普诺夫函数的基础上,得到了线性矩阵不等式的充分条件。更多关于使用常见李雅普诺夫函数的NCSs稳定性和控制的结果,请参考[62]及其文献。对非通用Lyapunov函数的研究有两个原因:首先,使用通用Lyapunov函数的稳定性条件往往是保守的。其次,利用常用的李雅普诺夫函数验证了切换系统在任意跳变情况下的稳定性。在这种情况下,提出了切换李雅普诺夫函数,根据网络控制系统的不同情况构造不同的李雅普诺夫函数参数。虽然通过切换李雅普诺夫函数可以得到一个不太保守的稳定性条件,但这个条件仍然是充分的而不是必要的。在NCS应用中,切换Lyapunov函数是根据时变延迟构造的[63]。如前所述,常见的切换李雅普诺夫函数是切换李雅普诺夫函数的一种特例。因此在[63]中,时延和丢包依赖控制器的保守性较差。在本文中,切换李雅普诺夫函数方法被广泛应用于降低稳定性分析和控制器设计的保守性。
The main approaches in this thesis are based on Lyapunov theory, or the corol- laries stemmed from the Lyapunov theory. Before addressing the stability of systems switching under Bernoulli processes or semi-Markov processes, a brief review of sta- bility analysis for systems with arbitrary switching is summarized. It is shown that the arbitrary switching systems may not be stable even if all sub-systems are stable. The stability of each sub-system becomes a sufficient condition for the overall system stability only in some special cases, for example, when the A matrices of the sub- system state-space models are symmetric [57], or when the sub-systems are pairwise commutative [58]. Nevertheless, the existence of a common Lyapunov function for all the sub-systems is able to guarantee the overall stability with arbitrary switching [59]. Following the idea of searching for a common Lyapunov function and with the devel- opments of numerical toolboxes, such as LMI Toolbox [28] and YALMIP [60], lots of results have been reported for NCSs via switching system approaches. A controller was designed for NCSs in [61]; the NCSs under investigation were subject to network- induced packet dropouts and time-varying delays. Based on the constructed common Lyapunov functions, sufficient conditions in terms of LMIs are obtained. For more results on NCSs stability and control using common Lyapunov functions, please refer to [62] and the references therein. The study on non-common Lyapunov functions for the NCSs has two reasons: Firstly, stability conditions using the common Lya- punov functions are often conservative. Secondly, common Lyapunov functions are used to verify the switching system stability with arbitrary jumps. In such cases, the switching Lyapunov functions are developed, where different Lyapunov function pa- rameters are constructed corresponding to different conditions in the NCS. Although a less conservative stability condition could be obtained via switching Lyapunov func- tions, the conditions are still only sufficient not necessary. In the NCS applications, switching Lyapunov functions are constructed depending on time-varying delays [63]. As mentioned before, the common switching Lyapunov function is a special case of the switching Lyapunov function. Therefore in [63], the delay and dropout depen- dent controller is less conservative. In this thesis, the switching Lyapunov function approach has been extensively utilized to reduce the conservativeness in the stability analysis and the controller design.
1.3 研究目的
虽然关于跳变线性系统和NCSs的研究有很多报道,但是关于S-MJLSs的分析和合成还没有得到充分的阐述和明确的报道。这项研究的动机有两方面。
Though many results on jump linear systems and NCSs were reported, the analysis and synthesis of S-MJLSs have not been fully addressed and clearly reported. The motivations of this research are two-fold.
1) 切换系统分析
如前几节所讨论的,已经报告了一些关于S-MJLSs的结果。这些结果要么是直接近似于MJLSs的结果,要么带有妨碍其工程应用的计算缺陷。因此,论文的第一部分是提供S-MJLSs的稳定性条件,特别是在可接受的计算时间内可以用于工程应用的数值可测试条件。考虑到系统辨识中的建模误差,研究具有不确定性的系统的稳定性问题。为了将该理论应用到网络控制系统中,进一步研究了时变时滞S-MJLSs的稳定性条件。另一个研究动机来自于容错控制群体。系统组件的寿命可能不服从指数分布。因此,应采用半马尔可夫过程对系统故障进行建模。
As discussed in previous sections, some results on S-MJLSs have been reported. These results are either directly approximated from the results for MJLSs, or with computational defects which preclude their engineering applications. So the first part of the thesis is to provide the stability condition for S-MJLSs, especially the numerically testable conditions which are ready for engineering applications within acceptable computational time. Considering the modeling errors in the system identification, the stability problem for systems with un- certainties should be studied. In order to apply the theory to NCSs, stability conditions are further studied for S-MJLSs with time-varying delays. Another research motivation comes from the fault tolerant control community. The life time of a system component may not follow an exponential distribution. Thus a semi-Markov process should be applied to model the system faults.
2) 网络化动态系统分析
基于所提出的跳跃线性系统和具有不确定或时滞的系统的稳定性条件,应研究不同的应用。在网络控制系统中,从控制器到执行器的控制信号受到网络诱导延迟的影响。当控制信号被计算时,这个延迟信息是不能被控制器访问的。因此,提出了一种"全送一送一"的方案,允许执行器在厂侧自由选择合适的控制信号。另一种补偿时间延迟的方法是考虑更多的ncs中工厂的历史测量。为了进一步验证一些既定的结果,一个触觉装置被用作实验测试工具。
Based on the proposed stability conditions for jump linear systems and for systems with uncertainties or delays, different applications should be studied. In NCSs, the control signal from the controller to the actuator is subject to network-induced delays. This delay information is not accessible by the con- troller when the control signal is calculated. Therefore, a send all, apply one scheme is proposed by allowing the actuator to freely choose an appropriate con- trol signal in the plant side. Another approach to compensate for time delays is to consider more historical measurements of the plant in NCSs. To further verify some of the established results, a haptic device is used as an experimental testing tool.
研究路线图如图1.4所示。为了研究网络控制系统的两个基本问题:1)时延;2)丢包问题,研究了交换系统。交换系统充当系统(NCSs)和问题(延迟和数据包丢失)之间的桥梁。
The road map of the research can be summarized in Figure 1.4. To investigate the two fundamental problems for the NCS: 1) Time delays and 2) packet dropouts the switching system is studied. The switching system serves as a bridge between the system (NCSs) and the problems (delays and packet dropouts).

1.4 研究贡献及论文组织
本文的组织结构如下。第一章综述了跳跃线性系统和ncs的基本概念、研究动机和主要研究方法。然后介绍了本博士论文的研究贡献。
The thesis is organized as follows. In Chapter 1, the fundamental concepts and existing results of jump linear systems and NCSs, research motivations, and main research approaches have been reviewed. Then the research contributions of this PhD thesis are presented.
第二章讨论了S-MJLSs的稳定性和控制问题。在一些实际系统的建模方面,S-MJLS比MJLS更通用。与MJLS的常数跃迁速率不同,S-MJLS的跃迁速率是随时间变化的。本章主要研究具有范数有界不确定性的S-MJLS的鲁棒随机稳定条件和鲁棒控制设计问题。导出了构造的李雅普诺夫函数的无穷小生成子。利用线性矩阵不等式建立了S-MJLSs随机稳定性的可解的充分条件。为了减少稳定性条件的保守性,我们提出了引入转移率的上界和下界,同时采用一种新的划分方案。据此开发了鲁棒状态反馈控制器。仿真研究和比较表明了所提方法的有效性和优越性。利用本章所发展的定理,首次建立了S-MJLSs的数值可测试稳定性条件和控制器设计方法。
The stability and control problems for S-MJLSs are discussed in Chapter 2. The S-MJLS is more general than the MJLS in terms of modeling some practical systems. Unlike the constant transition rates in the MJLS, the transition rates of the S-MJLS are time-varying. This chapter focuses on the robust stochastic stability condition and the robust control design problem for the S-MJLS with norm-bounded uncertainties. The infinitesimal generator for the constructed Lyapunov function is derived. Numer- ically solvable sufficient conditions for the stochastic stability of S-MJLSs are then established in terms of LMIs. In order to reduce the conservativeness of the stability conditions, we propose to incorporate the upper and lower bounds of the transition rate and apply a new partition scheme at the same time. The robust state feedback controller is accordingly developed. Simulation studies and comparisons demonstrate the effectiveness and advantages of the proposed methods. With the developed theorems in this chapter, numerically testable stability conditions and controller design approaches are established for S-MJLSs for the first time.
第三章讨论了一类具有时变时滞的S-MJLSs的![]() 控制问题。提出了延迟随机切换系统的逗留时间划分技术。建立了状态反馈控制器设计的充分条件。并将其充分条件表示为一组易于求解的线性矩阵不等式。
控制问题。提出了延迟随机切换系统的逗留时间划分技术。建立了状态反馈控制器设计的充分条件。并将其充分条件表示为一组易于求解的线性矩阵不等式。
Chapter 3 discusses the ![]() control problem for a class of S-MJLSs with time- varying delays. The sojourn-time partition technique is proposed for the delayed stochastic switching system. A sufficient condition for designing a state feedback controller is then established. Moreover, the sufficient condition is expressed as a set of LMIs which can be readily solved.
control problem for a class of S-MJLSs with time- varying delays. The sojourn-time partition technique is proposed for the delayed stochastic switching system. A sufficient condition for designing a state feedback controller is then established. Moreover, the sufficient condition is expressed as a set of LMIs which can be readily solved.
第四章研究了基于H状态反馈控制器的主动容错控制问题。由于马尔可夫过程的局限性,我们将半马尔可夫过程应用到系统建模中。系统涉及两个随机过程:故障过程和故障检测识别过程。因此,在闭环系统中集成了两个相应的半马尔可夫过程。该框架能够容纳不同类型的系统故障,包括随机发生的传感器故障和执行器故障。设计了一种控制器以保证在给定的噪声/干扰衰减水平下的闭环稳定性。采用凸优化技术求解控制器参数。
Chapter 4 investigates the active fault tolerant control problem via the H state feedback controller. Due to the limitations of Markov processes, we apply semi- Markov process in the system modeling. Two random processes are involved in the system: the failure process and the fault detection and identification process. Therefore, two corresponding semi-Markov processes are integrated in the closed- loop system. This framework is able to accommodate different types of system faults, including the randomly happening sensor faults and actuator faults. A controller is designed to guarantee the closed-loop stability with a prescribed noise/disturbance attenuation level. The controller parameters are solved by using convex optimization techniques.
第五章讨论了具有多个物理分布式传感器的网络控制系统。具有多状态延迟的离散时间对象的状态信息通过通信网络发送给控制器。通过设置传感器调度算法,控制器在每个时间步长接收来自一个传感器的测量结果。提出了一种既考虑状态最新信息又考虑状态历史信息的保代价状态反馈控制器。另外,根据传感器调度方案,设计并实现了不同的控制增益,即所谓的传感器相关控制器。
In Chapter 5, the NCS with multiple physically distributed sensors is considered. The state information of the discrete-time plant with multiple state delays is sent to the controller by communication networks. By setting a sensor scheduling algorithm, the controller receives the measurement from one sensor at each time step. The guaranteed cost state feedback controller is proposed which considers not only the most up-to-date state information, but also the historical information of the state. In addition, according to the sensor scheduling scheme, we design and implement different control gains, i.e., the so-called sensor-dependent controller.
第六章研究了网络控制理论在触觉系统中的应用。在本章中,设计了一个虚拟耦合器用于虚拟全触觉系统在网络环境下的单自由度交互。机械手与控制计算机通过无线通信链路连接,通过无线通信链路传输机械手的位置和电机的转矩。虚拟环境由具有不同刚度和阻尼的多种材料组成,称为混合虚拟墙。虚拟角色和虚拟墙壁之间的接触点在不同的材料之间切换,这种移动具有随机过程的特征。摘要为实现触觉装置在人工操作下的自由振动,基于无源性理论建立了触觉装置的稳定性条件。将透明虚拟耦合器的设计问题转化为延迟跳跃线性系统的![]() 优化问题,提出了切换虚拟耦合器的设计方案。提出的虚拟耦合器的性能在仿体全触觉系统上进行了验证和测试。
优化问题,提出了切换虚拟耦合器的设计方案。提出的虚拟耦合器的性能在仿体全触觉系统上进行了验证和测试。
The application of NCS theory on a haptic system is investigated in Chapter 6. In this chapter, a virtual coupler is designed for the Phantom Omni Haptic System in the networked environment with one degree-of-freedom interaction. The manipulator and the control computer are connected through wireless communication links over which the position of the manipulator and the torque of the motor are transmitted. The virtual environment consists of multiple materials with different stiffness and damping, and it is termed the mixed virtual wall. The contact point between the avatar and the virtual wall switches among different materials, where the movement is characterized by a stochastic process. To achieve the free oscillation for the haptic device with the human operator, the stability condition is established based on the passivity theory. After transforming the transparent virtual coupler design problem into an ![]() optimization problem for a delayed jump linear system, we propose a design scheme for the switching virtual coupler. The performance of the proposed virtual coupler is verified and tested on the Phantom Omni Haptic System.
optimization problem for a delayed jump linear system, we propose a design scheme for the switching virtual coupler. The performance of the proposed virtual coupler is verified and tested on the Phantom Omni Haptic System.
第七章研究了基于马尔可夫链模型的随机时滞网络控制系统的鲁棒步和![]() 步跟踪控制方法。为了充分利用延迟信息,所提出的双模相关输出反馈控制器同时依赖于传感器到控制器和控制器到执行器的延迟。为了主动补偿控制器-执行器延迟,我们提出了一种全发送方案,采用一种方案:先发送一个控制信号序列,然后在执行器/工厂节点上,根据实际的控制器-执行器延迟,应用适当的控制信号。利用增广方法,所得到的闭环系统可以被模拟成离散时间的MJLS。通过求解一组具有非凸约束的线性矩阵不等式来解决H2阶和H阶跟踪问题。通过对一个网络直流电机系统的数值仿真和实验验证了所提方法的有效性。
步跟踪控制方法。为了充分利用延迟信息,所提出的双模相关输出反馈控制器同时依赖于传感器到控制器和控制器到执行器的延迟。为了主动补偿控制器-执行器延迟,我们提出了一种全发送方案,采用一种方案:先发送一个控制信号序列,然后在执行器/工厂节点上,根据实际的控制器-执行器延迟,应用适当的控制信号。利用增广方法,所得到的闭环系统可以被模拟成离散时间的MJLS。通过求解一组具有非凸约束的线性矩阵不等式来解决H2阶和H阶跟踪问题。通过对一个网络直流电机系统的数值仿真和实验验证了所提方法的有效性。
Chapter 7 investigates robust and ![]() step tracking control methods for NCSs subject to random time delays modeled by Markov chains. To make full use of the delay information, the proposed two-mode dependent output feedback controller depends on both sensor-to-controller and controller-to-actuator delays. To active- ly compensate for the controller-to-actuator delays, we propose the send all, apply one scheme: Sending a sequence of control signals, then at the actuator/plant node, applying the appropriate control signal according to the actual controller-to-actuator delay. Using the augmentation method, the resulting closed-loop system can be for- mulated as a discrete-time MJLS. The H2 and H step tracking problems are tackled by solving a set of LMIs with nonconvex constraints. Both numerical simulations and experiments on a networked DC motor system are conducted to illustrate the effec- tiveness of the proposed methods.
step tracking control methods for NCSs subject to random time delays modeled by Markov chains. To make full use of the delay information, the proposed two-mode dependent output feedback controller depends on both sensor-to-controller and controller-to-actuator delays. To active- ly compensate for the controller-to-actuator delays, we propose the send all, apply one scheme: Sending a sequence of control signals, then at the actuator/plant node, applying the appropriate control signal according to the actual controller-to-actuator delay. Using the augmentation method, the resulting closed-loop system can be for- mulated as a discrete-time MJLS. The H2 and H step tracking problems are tackled by solving a set of LMIs with nonconvex constraints. Both numerical simulations and experiments on a networked DC motor system are conducted to illustrate the effec- tiveness of the proposed methods.
第八章为本文的结束语和几个值得进一步研究的问题。
The concluding remarks and a few topics deserving future research attention are presented in Chapter 8.
本文的符号系统相对标准。上标“ ”和“-1”分别表示矩阵的转置和逆矩阵。
”和“-1”分别表示矩阵的转置和逆矩阵。 代表了n维欧式空间。P>0表示P是一个实的对称的正定矩阵。dim{v}表示向量v的维度。det(A)表示方阵A的行列式。tr表示一个矩阵的迹。
代表了n维欧式空间。P>0表示P是一个实的对称的正定矩阵。dim{v}表示向量v的维度。det(A)表示方阵A的行列式。tr表示一个矩阵的迹。![]() 为向量的欧几里得范数和矩阵的2范数。
为向量的欧几里得范数和矩阵的2范数。 表示数学期望。
表示数学期望。 表示事件A发生的概率。
表示事件A发生的概率。 表示克罗内克积。“*”是方阵中由于对称而导出的项的省略号。
表示克罗内克积。“*”是方阵中由于对称而导出的项的省略号。
2.半马尔可夫跳变线性系统的稳定性和控制
2.1 介绍
近年来,人们对马尔可夫跳变线性系统(MJSs)进行了广泛的研究。MJLSs是由一组线性系统建模的,由马尔可夫链控制的线性系统之间进行转换,可以用来描述和建模受突变影响的不同类型的系统[64]。因此,MJLS在控制系统中有许多应用,如容错系统、目标跟踪系统、制造过程、ncs和多智能体系统;参见[12,13,65]。许多关于MJLSs的重要结果已经在文献中提到。如[16,22,66]研究了稳定性分析、滤波器和控制设计问题,[11,67,68]讨论了MJLSs的最优控制和滤波器设计问题。此外,[69,70]讨论了带有马尔可夫跳变参数的非线性系统。除上述理论研究外,MJLSs还在实际系统中得到了应用,如网络化直流电机系统[71]。
The past years have witnessed extensive research on the Markov jump linear systems (MJLSs). Modeled by a set of linear systems with the transitions among the linear systems governed by the Markov chain, the MJLSs can be used to characterize and model different types of systems subject to abrupt changes [64]. Hence, the MJLS finds many applications in control systems, such as fault tolerant systems, target tracking systems, manufactory processes, NCSs, and multiagent systems; see, e.g., [12, 13, 65]. Many important results on MJLSs have been addressed in the literature. For instance, the stability analysis, filter and control design problems were investigated in [16, 22, 66], and the optimal control and filter design for MJLSs were discussed in [11, 67, 68]. Furthermore, nonlinear systems with Markov jumping parameters were addressed in [69, 70]. Besides the aforementioned theoretical studies, MJLSs also found applications in practical systems, such as networked DC motor systems [71].
一般来说,MJLS属于跳变线性系统的一类。在跳变线性系统中,两次连续跳变之间的持续时间h称为逗留时间,它通常是一个随机变量[30]。在连续时间跳变线性系统中,逗留时间h是一个由连续概率分布F控制的随机变量。例如,F在连续时间MJLS中是一个指数分布。在F的情况下,转移概率![]() 是系统从模式
是系统从模式 跳转到模式
跳转到模式 的速度/机率。这种转移概率在不同的应用中也被称为故障率或危险率[72]。从指数分布的无记忆性来看,
的速度/机率。这种转移概率在不同的应用中也被称为故障率或危险率[72]。从指数分布的无记忆性来看,![]() ,是一个常数,意味着跳跃速度与随机过程的过去/历史无关。事实上,在所有连续时间概率分布中,指数分布是唯一具有无记忆性的分布[72]。因此,用MJLS来描述利率随机系统时,应假定转移率为常数。然而,这个要求限制太大了,因为许多实际系统的转变速率不是常数[73,74]。例如,在容错控制系统中,浴缸曲线被广泛用于描述过渡速率函数的一种特定形式,该函数由三部分组成:a)递减,b)常数(大致),c)递增[75]。显然,这种过程的跳转不能用MJLS建模。76]报道了可靠性分析中浴缸形状的典型过渡率。文献[77]讨论了半马尔可夫过程在容错控制系统中的应用,证明了当实际系统不满足所谓的无记忆约束时,广泛使用的马尔可夫切换方案不适用。
,是一个常数,意味着跳跃速度与随机过程的过去/历史无关。事实上,在所有连续时间概率分布中,指数分布是唯一具有无记忆性的分布[72]。因此,用MJLS来描述利率随机系统时,应假定转移率为常数。然而,这个要求限制太大了,因为许多实际系统的转变速率不是常数[73,74]。例如,在容错控制系统中,浴缸曲线被广泛用于描述过渡速率函数的一种特定形式,该函数由三部分组成:a)递减,b)常数(大致),c)递增[75]。显然,这种过程的跳转不能用MJLS建模。76]报道了可靠性分析中浴缸形状的典型过渡率。文献[77]讨论了半马尔可夫过程在容错控制系统中的应用,证明了当实际系统不满足所谓的无记忆约束时,广泛使用的马尔可夫切换方案不适用。
In general, the MJLS belongs to the class of jump linear systems. In jump linear systems, the duration h between two successive jumps is referred to as sojourn-time which is usually a random variable [30]. In continuous-time jump linear systems, the sojourn-time h is a random variable governed by the continuous probability distribu- tion F . For instance, F is an exponential distribution in the continuous-time MJLS. Depending on F , the transition rate λij(h) is the speed/rate that the system jumps from mode i to mode j. The transition rate is also called the failure rate or the hazard rate in different applications [72]. From the memoryless property of the exponential distribution, λij(h) λij is a constant, meaning that the jump speed is independent of the past/history of the stochastic process. In fact, among all the continuous-time probability distributions, exponential distribution is the only one that possesses the memoryless property [72]. As a result, if the MJLS is applied to describe the stochas- tic system of interest, the transition rate should be assumed to be constant. This requirement, however, is too restrictive, because the transition rates for many prac- tical systems are not constants [73, 74]. For example, in the fault tolerant control systems, the bathtub curve is widely used to describe a particular form of the transi- tion rate function which consists of three parts: a) decreasing, b) constant (roughly), c) increasing [75]. Obviously, the jumping of such process cannot be modeled by an MJLS. A typical transition rate in the bathtub shape in the reliability analysis was reported in [76]. The application of semi-Markov processes in fault-tolerant control systems was discussed in [77], and it was shown that when a practical system does not satisfy the so-called memoryless restriction, the widely used Markov switching scheme would not be applicable.
在更一般的情况下,转移概率![]() 通常是时变的,而不是常数
通常是时变的,而不是常数 [74]。驻留时间是非指数分布的连续随机过程常被称为连续半马尔可夫过程。据此,将根据半马尔可夫过程进行切换的跳变线性系统称为半马尔可夫跳变线性系统(S-MJLS)[1]。据了解,MJLS是S-MJLSs的一种特殊情况,可以用于更广泛的实际随机系统的建模和表征。因此,研究S-MJLS的随机稳定性和鲁棒镇定问题既具有理论价值,也具有实际意义,这是本章的重点。
[74]。驻留时间是非指数分布的连续随机过程常被称为连续半马尔可夫过程。据此,将根据半马尔可夫过程进行切换的跳变线性系统称为半马尔可夫跳变线性系统(S-MJLS)[1]。据了解,MJLS是S-MJLSs的一种特殊情况,可以用于更广泛的实际随机系统的建模和表征。因此,研究S-MJLS的随机稳定性和鲁棒镇定问题既具有理论价值,也具有实际意义,这是本章的重点。
In a more general setting, the transition rate λij(h) is usually time-varying in- stead of a constant λij [74]. A continuous stochastic process whose sojourn-time is non-exponentially distributed is often termed as a continuous semi-Markov process. Accordingly, the jump linear system which switches according to a semi-Markov pro- cess is termed as a semi-Markov jump linear system (S-MJLS) [1]. It is known that the MJLS is a special case of S-MJLSs that can be used to model and characterize a wider range of practical stochastic systems. Therefore, it is of both theoretical merit and practical interest to investigate the stochastic stability and robust stabilization problems of S-MJLS, which is the focus of this chapter.
与MJSs丰富的文献相比,对S-MJLSs的研究相对较少。在[1]中,给出了S-MJLS的随机稳定条件和控制器设计方法,并在串列腔相互作用系统上进行了验证。然而,值得指出的是,驻留时间分布几乎是指数分布;这说明S-MJLS几乎是一个MJLS,并且在控制设计问题中没有充分刻画转移概率的时变信息。Hou等人讨论了具有半马尔可夫跳变参数的线性系统的随机稳定性,对马尔可夫跳变系统[31]也得到了类似的结果。由于相型(PH)分布的密度性质,[31,78]定义了PH半马尔可夫过程,建立了具有PH半马尔可夫跳变参数的线性系统的稳定性条件。Shmerling等人研究了带半markov跳变参数微分方程的随机稳定性[79],其中通过检查一组正定矩阵的存在性来验证系统的均方渐近稳定性。[79]中的条件用积分形式表示,很难检验。研究表明,尽管S-MJLSs的稳定性和控制设计问题越来越受到人们的关注,但对于建立数值可测试的随机稳定条件和控制器设计的研究却很少。目前的研究主要是由于多层混合声发射的局限性和多层混合声发射的广泛应用。本章的主要目的有三方面:
Compared to the rich literature on MJLSs, there are relatively few research efforts devoted to S-MJLSs. In [1], a stochastic stability condition and the controller design method for the S-MJLS were presented, and further the results were verified on a bunch-train cavity interaction system. Yet, it is worthwhile to point out that the sojourn-time distribution was nearly exponential ; this indicates that the S-MJLS was nearly an MJLS and the time-varying information of the transition rate was not fully characterized in the control design problem. Hou et al. discussed the stochastic stability for the linear system with semi-Markov jump parameters and similar results were obtained for the Markov jump systems [31]. Due to the density property of phase- type (PH) distributions, the PH semi-Markov process was defined and the stability condition of linear systems with PH semi-Markov jump parameters was established in [31, 78]. Shmerling et al. studied the stochastic stability for differential equations with semi-Markov jump parameters [79], where the mean square asymptotic stability of the system was verified by checking the existence of a set of positive definite matrices. The condition in [79] was expressed in an integration form which is difficult to check. It is noticed that, although the stability and control design problems for S-MJLSs have been receiving increasing interest, little attention has been paid to developing numerically testable stochastic stability conditions, and little research was devoted to the controller design for S-MJLSs. The limitation of the MJLS and the wide application of the S-MJLS motivate the current research. The main objectives of this chapter are three-fold
1)建立一类不确定S-MJLSs的充分随机稳定性条件。
1)To establish sufficient stochastic stability conditions for a class of uncertain S-MJLSs.
2)提出一种新的划分方案,通过划分转移率的范围(从下界到上界)来有效降低稳定性条件的保守性。
2)To propose a new partition scheme by dividing the range of the transition rate (from the lower bound to the upper bound) in order to effectively reduce the conservativeness of the stability conditions.
3)针对具有范数有界不确定性的S-MJLSs,提出了一种鲁棒状态反馈控制器设计方法。
3)To propose a robust state feedback controller design for the S-MJLSs with norm-bounded uncertainties.
本章其余部分的组织如下。问题的公式在2.2节中给出。在2.3节中,建立了S-MJLSs随机稳定性的充分条件。鲁棒镇定问题将在第2.4节讨论。最后,仿真研究证明了2.5节中所提方法的有效性。第2.6节作了一些总结。
The remainder of this chapter is organized as follows. The problem formulation is presented in Section 2.2. In Section 2.3, the sufficient conditions for the stochastic stability of S-MJLSs are established. The robust stabilization problem is discussed in Section 2.4. Finally, simulation studies illustrate the effectiveness of the proposed methods in Section 2.5. Some concluding remarks are made in Section 2.6.
2.2 问题描述
考虑以下具有范数有界不确定性的非强制连续时间S-MJLS
(2.1)
其中:
 是一个时间连续的半马尔可夫过程,取值在有限空间
是一个时间连续的半马尔可夫过程,取值在有限空间![]() ;
;![]() 是一个状态向量;
是一个状态向量;![]() 是系统在t=0时刻的初始状态,
是系统在t=0时刻的初始状态,![]() 是半马尔可夫过程在t=0时刻的初始模态;
是半马尔可夫过程在t=0时刻的初始模态; 是维度兼容的系统矩阵,其依赖于
是维度兼容的系统矩阵,其依赖于![]() ;
; 和
和 也是已知的实常数矩阵;
也是已知的实常数矩阵; 是未知的是具有勒贝格测度元素的矩阵函数,满足
是未知的是具有勒贝格测度元素的矩阵函数,满足 (其中I是单位矩阵);为了方便标识,将当
(其中I是单位矩阵);为了方便标识,将当![]() 时刻下的
时刻下的 以及分别写作
以及分别写作![]() 和
和 ,这种省略不会造成任何混淆;除了特殊语句外,类似的符号将在续集中使用。
,这种省略不会造成任何混淆;除了特殊语句外,类似的符号将在续集中使用。
半马尔可夫过程的演化受以下概率跃迁控制:
![]()
其中:
![]() 是在t时刻时
是在t时刻时 从模态i到模态j的转移概率,并且存在
从模态i到模态j的转移概率,并且存在 ;
;![]() 是小o标记,定义为
是小o标记,定义为![]() ;在实际工程中,转移概率
;在实际工程中,转移概率![]() 通常存在界限
通常存在界限 和
和![]() (
( )[80]。
)[80]。
备注2.1
驻留时间h是最近一次系统跳转所经过的时间,与t不同。因此,当系统跳转时,h被设置为0。转移概率![]() 只与h有关。
只与h有关。
对于随机稳定性,我们采用以下定义。更多详情请参考[81,82,83]及其参考文献。
定义2.1
公式2.1中所有模态的系统具有半马尔可夫跳变参数的随机稳定性的条件是:对于任意初始条件 ,系统在所有时刻
,系统在所有时刻![]() ,如果存在有限正常数
,如果存在有限正常数 以及以下条件成立:
以及以下条件成立:
 (2.2)
(2.2)
其中:
![]() 是以为初始值的期望状态。
是以为初始值的期望状态。
2.3 S-MJLS的随机稳定性分析
在继续之前,我们回顾以下引理,这些引理将用于证明S-MJLS的鲁棒随机稳定性。
Lemma 2.1
如果 ,然后还存在两个常数矩阵
,然后还存在两个常数矩阵 和
和 ,以及一个标量
,以及一个标量 ,则以下不等式成立:
,则以下不等式成立:
![]() (2.3)
(2.3)
定理 2.1
2.1中的S-MJLS系统是随机稳定的条件是:如果存在一系列矩阵![]() ,并且一系列标量
,并且一系列标量![]() ,并且下列不等式也对所有容许的不确定性成立:
,并且下列不等式也对所有容许的不确定性成立:
 (2.4)
(2.4)
其中,

证明:
假设以下李雅普诺夫函数:
 (2.5)
(2.5)
其中:
![]() 定义为正定的对称矩阵。
定义为正定的对称矩阵。
无穷小矩阵 可以假设为李雅普诺夫函数
可以假设为李雅普诺夫函数![]() 沿着半马尔可夫过程在点
沿着半马尔可夫过程在点![]() 处的求导[86]。MJLS和S-MJLS受不同的随机过程控制,因此S-MJLS和S-MJLS的李亚普诺夫函数的无穷小生成器本质上是不同的。首先我们需要推导出
处的求导[86]。MJLS和S-MJLS受不同的随机过程控制,因此S-MJLS和S-MJLS的李亚普诺夫函数的无穷小生成器本质上是不同的。首先我们需要推导出![]() 的无穷小生成子。根据[14]的定义,可以得到:
的无穷小生成子。根据[14]的定义,可以得到:

这里 是一个正的无穷小数。
是一个正的无穷小数。
假设![]() ,并且根据总的概率和条件期望,可以得到:
,并且根据总的概率和条件期望,可以得到:
(2.6)
对于MJSs,由于无记忆性,![]() ,并且
,并且 。
。
然而,对于S-MJSs,上面两个等式都无法成立;相对的,它们是依赖于驻留时间h的函数。因此,等式(2.6)等价于:
(2.7)
其中:
h是系统从上次跳转后停留在模式i所花费的时间;![]() 是当系统保持在模式i时,驻留时间的累积分布函数(CDF),并且
是当系统保持在模式i时,驻留时间的累积分布函数(CDF),并且 是系统从模态i跳向j的概率密度。
是系统从模态i跳向j的概率密度。
假设是很小的一个量,则![]() 可以表示为
可以表示为 :
:
![]()
然后这个无穷小矩阵就变成了
![]()
其中
利用CDF的概率,有:
因此,
![Q(i,t,h)\\ = \sum_{j=1,j\neq i}^{N}q_{ij}P(j) \lambda_{i}(h) -P(i) \lambda_{i}(h)+ [(A_{i} + E_{i} \delta(t)F_{A,i} )^{T}P(i)+P(i)(A_{i} + E_{i} \delta(t)F_{A,i} )]](http://img.e-com-net.com/image/info8/a81605740f8d4325a13e904242953889.gif)
定义:
![]() ,
,
 ,
,
然后可以得到:
利用引理2.1,可以得到:
![]()
其中, 是一个正的标量,因此可以得到:
是一个正的标量,因此可以得到:
 ,
,
其中:
基于舒尔补定理,对于 满足
满足
![]()
因此,可以得到:

所以,先假设![]() 存在,定义:
存在,定义:
 (2.8)
(2.8)
其中,
![]() (2.9)
(2.9)

显然,![]() 和
和![]() 存在。因为
存在。因为![]() 是正的,并且拥有上边界
是正的,并且拥有上边界![]() ,所以下列等式成立:
,所以下列等式成立:
 (2.10)
(2.10)
其中, 表示负半定矩阵。因此,
表示负半定矩阵。因此,
 (2.11)
(2.11)
因此,![]() 一直存在。
一直存在。
根据广义的Dynkin公式[87],可以得到:
最后一项不等式意味着:
![]()
而且,在(2.4)中可以知道![]() ,所以对于任意
,所以对于任意 ,存在
,存在

当t趋近于无穷时,可以得到:

因此,令

根据定义2.1,可以知道这个系统随机稳定,原定理得证。
为此,在定理2.1中建立了S-MJLSs随机稳定性的充分条件。但是,由于(2.4)中存在![]() 的时变项,所以定理2.1中(2.4)的条件的求解不可避免地涉及到无穷多个LMI的检验,从数值计算的角度来看,即使不是不可能,也是非常耗时的。因此,问题自然出现了:如何建立S-MJLSs随机稳定性的数值可测试条件?下面,定理2.2将解决这个问题。
的时变项,所以定理2.1中(2.4)的条件的求解不可避免地涉及到无穷多个LMI的检验,从数值计算的角度来看,即使不是不可能,也是非常耗时的。因此,问题自然出现了:如何建立S-MJLSs随机稳定性的数值可测试条件?下面,定理2.2将解决这个问题。
定理 2.2
2.1中的S-MJLS是随机稳定的,如果存在一系列矩阵 和一系列标量
和一系列标量![]() 和以下不等式对所有不确定性成立:
和以下不等式对所有不确定性成立:
![]() ,
,![]()
其中,
![]() ,
,
 ,
, 。
。
证明:
根据定理2.1,转移概率为![]() 的跳变线性系统是随机稳定的条件是:如果存在
的跳变线性系统是随机稳定的条件是:如果存在![]() 并且使得2.4条件成立。对于一个明确的h,
并且使得2.4条件成立。对于一个明确的h,![]() 可以重写为:
可以重写为:![]() ,其中
,其中 和
和![]() 。将式子2.12(a)乘以,(b)乘以
。将式子2.12(a)乘以,(b)乘以![]() ,可以得到:
,可以得到:
通过调整和,可以得到所有可能的![]() 。因此,(2.1)中的条件一致成立,这意味着(2.1)中的系统是随机稳定的。
。因此,(2.1)中的条件一致成立,这意味着(2.1)中的系统是随机稳定的。
在定理2.2中,利用转移率的上界和下界,又向数值可解的条件迈进了一步。但定理2.2中导出的充分条件相对保守。然后另一个关键问题出现在这里:如何降低稳定性条件的保守性,同时保持它的数值可测试性?为了减少保守性,我们建议在每一种工作模式下将逗留时间h划分为M段。由于跃迁率![]() 是时变的,用
是时变的,用![]() 和
和![]() 作为第m段跃迁率的上界和下界。这种划分方式可以有效降低保守性,可以将更多的转移率信息纳入分析和综合。
作为第m段跃迁率的上界和下界。这种划分方式可以有效降低保守性,可以将更多的转移率信息纳入分析和综合。
推论2.1
2.1中的S-MJLS是随机稳定的,如果存在一系列矩阵 和一系列标量
和一系列标量![]() 和以下不等式对所有不确定性成立:
和以下不等式对所有不确定性成立:
![]() ,
,![]()
其中,
 ,
,
 ,
, ,
,
将逗留时间划分为M段,每段(2.1)中原始的S-MJLS可以看作是一个单独的S-MJLS,其随时间变化的过渡率在一个较小的范围内变化。对于第m段的S-MJLS个体,应用定理2.2,用![]() ,
, 代替
代替![]() ,
,![]() ,可以很容易地证明这个推论。
,可以很容易地证明这个推论。
2.4 S-MJLS的鲁棒反馈控制
在本节中,我们将讨论针对以下S-MJLS如何设计的鲁棒状态反馈控制律:
(2.16)
其中:
![]() 和
和![]() 是维数正确的系统矩阵。
是维数正确的系统矩阵。 是一个已知的实矩阵满足
是一个已知的实矩阵满足 并且
并且 是已知的维数正确的实常数矩阵。
是已知的维数正确的实常数矩阵。
鲁棒控制律被设计为:
![]() (2.17)
(2.17)
定理2.3
控制器 能够镇定系统的条件是:如果存在一系列矩阵
能够镇定系统的条件是:如果存在一系列矩阵![]() ,同时还有一系列标量
,同时还有一系列标量![]() 并且以下LMI成立:
并且以下LMI成立:
(2.18)
其中,
![]() ,
,
,
![]() 。
。
证明:
对式(2.16)中的系统采用式(2.17)中的鲁棒控制律,使闭环系统变为:
![]() (2.19)
(2.19)
其中,
![]()
应用定理2.1中的随机稳定条件,我们知道以下不等式成立:
通过引理2.1可以得到以下不等式:
![]() ,
,
 ,
,
因此,(2.19)中的闭环S-MJLS是随机稳定的如果以下不等式成立:
定义![]() 和
和![]() ,将最后一个不等式前后同乘以
,将最后一个不等式前后同乘以 ,可以得到:
,可以得到:
使用Schur补码,最后一个不等式等价于(2.18)。证明到此结束。
检验定理2.3中的条件涉及求解无穷多个在数值上不可能的线性矩阵不等式。我们在2.3节的稳定性分析中应用相同的思想,用![]() 和
和![]() 表示
表示![]() 跃迁率的上界和下界。因此,我们有以下定理。
跃迁率的上界和下界。因此,我们有以下定理。
定理2.4.
控制器能够镇定系统的条件是:如果存在一系列矩阵![]() ,同时还有一系列标量
,同时还有一系列标量![]() 并且以下LMI成立:
并且以下LMI成立:
,
(2.18)
其中,
,
 ,
,
,
,
![]() 。
。
应用2.3节中随机稳定性分析中的逗留时间划分技术,可以很容易地建立下列推论。
推论 2.2
控制器![]() 能够镇定系统的条件是:如果存在一系列矩阵
能够镇定系统的条件是:如果存在一系列矩阵 ,同时还有一系列标量
,同时还有一系列标量![]() 并且以下LMI成立:
并且以下LMI成立:
,
(2.18)
其中,
,
,
,
,
![]() 。
。
遵循定理2.2和推论2.1中使用的相同技术,定理2.4和推论2.2可以很容易地证明,因此证明在此省略。
备注 2.2
驻留时间的划分策略对S-MJLS的随机稳定性分析和相应的鲁棒控制器设计有重要作用。如[88]所示,充分条件的保守性随着分区的增加而降低。在本章中,逗留时间被划分为第![]() 段:
段:
![]() (2.22)
(2.22)
这里,![]() 和
和 是当系统运行在特定模式时m阶段的开始和结束时间。图2.1给出了开始和结束时间的说明。在该图中,模式3共设置M个区段。S- MJLS在
是当系统运行在特定模式时m阶段的开始和结束时间。图2.1给出了开始和结束时间的说明。在该图中,模式3共设置M个区段。S- MJLS在![]() 之后和
之后和![]() 之前从模式3切换到模式1,即系统在
之前从模式3切换到模式1,即系统在 部分切换。
部分切换。

与目前使用的分区技术不同,我们也可以提出其他的划分方法。例如,将每个部分统一划分,即:
 (2.23)
(2.23)
或者,对每个部分的过渡率的变化施加限制,
![]() (2.24)
(2.24)
事实上,a)不同的分区数(M)和 b)不同的逗留时间分区策略对稳定性分析和控制器设计的影响尚未得到充分的研究,这一问题值得进一步探讨,是我们当前的研究课题。
备注2.3
在[88]中,通过研究停留时间服从威布尔分布的跳跃线性系统,分析和解释了时变过渡率与恒定过渡率之间的差异;建立了保证S-MJLS稳定性的数值可测充分条件。然而,[88]没有考虑模型的不确定性。在这一章中,我们推广了具有范数有界不确定性的S-MJLSs的稳定性分析和相应的鲁棒控制设计。此外,第2.5节还分析和介绍了随机切换系统控制性能的统计特性。
2.5 解释性例子
考虑到一个形式如2.16的连续时间的S-MJLS系统运行在以下列系统矩阵的2个模态下:

标称系统矩阵为:

描述范数有界不确定性的矩阵是

其中, 和
和 都是不确定的实参数,其满足
都是不确定的实参数,其满足![]() ,
,![]() 。
。
根据逗留时间h,转移概率![]() 是一个连续的分段函数,如下所示:
是一个连续的分段函数,如下所示:
 (2.26)
(2.26)
其中, ,
,![]() 。假设切换系统从模态i跳变至模态j,如果驻留时间遵循尺度参数为
。假设切换系统从模态i跳变至模态j,如果驻留时间遵循尺度参数为 形状参数为
形状参数为 的韦伯分布,则转移概率函数为:
的韦伯分布,则转移概率函数为:![]() 。因此,当逗留时间在高可信水平上服从韦伯分布时,过渡率函数(2.26)可以被视为一个近似。如果停留时间符合上述韦伯分布,则跳变发生在区间
。因此,当逗留时间在高可信水平上服从韦伯分布时,过渡率函数(2.26)可以被视为一个近似。如果停留时间符合上述韦伯分布,则跳变发生在区间![]() 上,且概率大于0.99。让
上,且概率大于0.99。让 定义为跳变时间,则
定义为跳变时间,则![]() 。值得注意的是,韦伯分布在可靠性工程中被广泛用于建立容错系统模型[75]。
。值得注意的是,韦伯分布在可靠性工程中被广泛用于建立容错系统模型[75]。
根据推论2.2,设M为2,即在h=0.8326处将逗留时间h分成两段。因此,当h<0.8326时,模式1的状态反馈控制律为K(1,1),模式2的状态反馈控制律为K(2,1);当h>0.8326时,模式1的状态反馈控制律为K(1,2),模式2的状态反馈控制律为K(2,2)。在PC机上(3.0 GHz, 2.0 GB RAM内存)计算时间为0.0749 s。利用推论2.2设计的状态反馈控制律如下:

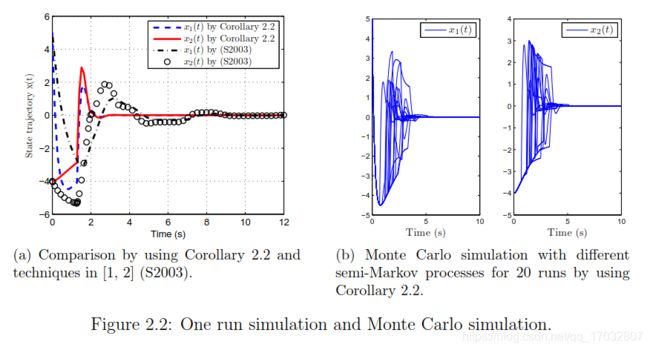
执行控制律,从初始状态![]() 开始,被控系统的状态轨迹如图2.2a所示。可以看出,所设计的控制器是可行的,并且保证了闭环系统的随机稳定性。
开始,被控系统的状态轨迹如图2.2a所示。可以看出,所设计的控制器是可行的,并且保证了闭环系统的随机稳定性。
基于不同区间划分的控制器设计:需要注意的是,应用定理2.4,(2.20)中的条件是不可行的。将驻留时间h进一步划分为2段,得到控制器(2.27)。另外,对于某些系统,m = 4是可行解,而m = 2不是。因此,使用推论2.2,较大的M更有可能产生可行的控制器。如何将驻留时间适当地划分为若干部分,仍值得进一步研究。
与[1,2]比较:对于每个工作模式,采用[1,2]中的技术提出的控制器分别为K1 =[3.7949,2.2244], K2 =[1.7292,1.2225]。在仿真中,采用相同的初始条件![]() 和相同的切换时间,状态轨迹如图2.2a所示。对于所设计的控制器,两种状态收敛到0需要2.95s,而[1,2]所设计的控制器则需要超过10s。从理论上讲,由[1,2]得到的控制器反馈增益相对较小,因此瞬态响应较慢。因此,所提出的控制设计技术优于现有的方法。
和相同的切换时间,状态轨迹如图2.2a所示。对于所设计的控制器,两种状态收敛到0需要2.95s,而[1,2]所设计的控制器则需要超过10s。从理论上讲,由[1,2]得到的控制器反馈增益相对较小,因此瞬态响应较慢。因此,所提出的控制设计技术优于现有的方法。
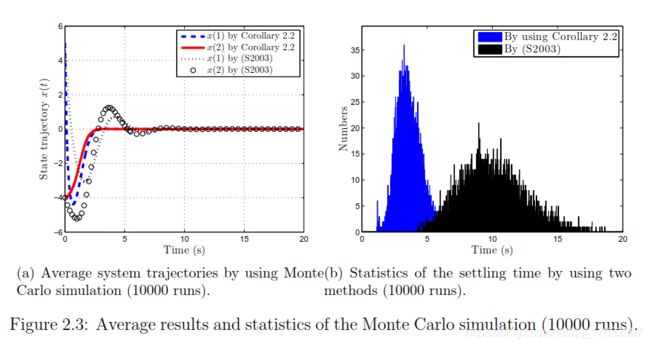
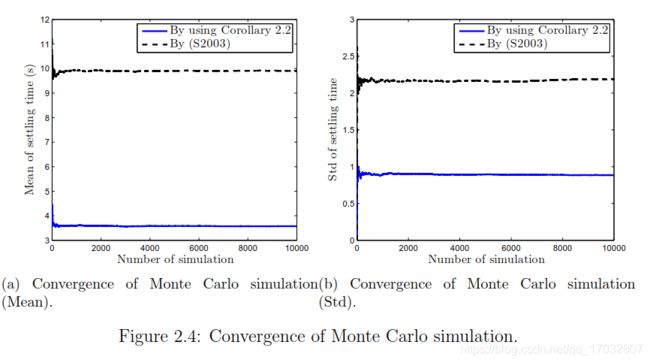
为了进一步说明所提技术的有效性,我们进行了蒙特卡罗模拟。在图2.2b中,受控系统状态x1(t)和x2(t)的轨迹分别显示了20次运行。半马尔可夫过程在每次运行中是唯一的,由(2.26)生成。可以看出,系统在每次仿真运行时都是随机稳定的。此外,10000次蒙特卡罗模拟运行的平均状态![]() 如图2.4a所示。显然,通过使用所提出的控制器,状态收敛具有更小的超调量和更小的稳定时间。统计上,10000次运行的稳定时间总结在图2.4b中。在仿真中,我们用
如图2.4a所示。显然,通过使用所提出的控制器,状态收敛具有更小的超调量和更小的稳定时间。统计上,10000次运行的稳定时间总结在图2.4b中。在仿真中,我们用 表示稳定时间
表示稳定时间
 (2.28)
(2.28)
采用两种不同的控制器的稳定时间平均值分别为3.5741 s和9.9100 s。因此,在随机意义上,本章提出的控制方案可以产生更快的瞬态响应。除了稳定时间的平均值外,标准偏差(Std)对于描述系统性能也是至关重要的。10000次运行的稳定时间标准偏差分别为0.8849和2.1895。图2.4显示了不同模拟运行次数下平均阀的收敛性和沉降时间的标准差。表2.1列出了1、2、3个标准差。

2.6 结论
在本章中,我们研究了S-MJLSs的随机稳定性和鲁棒镇定问题。首先,推导了S-MJLS的二次李雅普诺夫函数V(·)的无穷小产生子。然后建立了具有范数有界不确定性的S-MJLSs的随机稳定性充分条件。通过求解一组线性矩阵不等式,进一步放宽了该问题的充分条件。通过将逗留时间h分成若干小段,可以有效地降低充分条件的保守性。不同的逗留时间划分方法见备注2.2;不同方法对随机稳定性和控制性能的影响值得进一步研究。最后,提出了鲁棒状态反馈控制器的设计方法。数值算例和比较表明了所提方法的有效性。
3. 对于含时滞的半马尔可夫跳变线性系统的H无穷的状态反馈控制
3.1 简介
跳跃线性系统的研究是由许多现实世界中涉及突变和切换的技术问题引起的[89,90]。系统参数的演化可以在一个随机框架内建模,其中每一组系统参数描述一个线性系统。在跳跃线性系统中,逗留时间h是两个连续跳跃/切换之间的持续时间。一般来说,h是遵循一定概率分布的随机变量。例如,在连续时间跳变线性系统中,如果h受指数分布控制,则将该跳变线性系统简化为著名的马尔可夫跳变线性系统(MJLS),该系统已引起了广泛的研究关注。MJLS的应用涉及多个研究领域,如NCSs[56]、容错系统[91]、航空航天系统[92]等。因为MJLS模型适合于描述和表示系统更改和开关,例如,系统故障、随机事件和意外的配置更改。
The study of jump linear systems is motivated by many real-world technical problems involving abrupt changes and switches [89, 90]. The evolution of system parameters can be modeled within a stochastic framework, where each set of the system param- eters describes one linear system. In the jump linear system, the sojourn-time h is the duration between two consecutive jumps/switches. In general, h is a random variable following certain probability distributions. For example, in a continuous-time jump linear system, if h is governed by an exponential distribution, then the jump linear system is reduced to the well-known Markov jump linear system (MJLS) which has attracted much research attention. Applications of MJLS cover several research areas, such as NCSs [56], fault tolerant systems [91], aerospace systems [92], and so on. Because the MJLS model is suitable for characterizing and representing system changes and switches, for example, system failures, random events, and unexpected configuration changes.
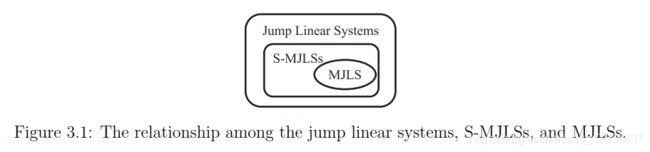
在一个更一般的框架中,逗留时间遵循任何可能不总是取指数分布的概率分布。在这种情况下,跳变线性系统被称为半马尔科夫跳变线性系统[1]。因此,MJLSs的集合是S-MJLSs集合的一个子集。MJLS与S-MJLS以及跳变线性系统之间的关系如图3.1所示。与文献丰富相比,对S- MJLSs的研究相对较少。在[1]和[2]中,建立了一个随机稳定条件,并根据该稳定条件设计了控制器。设计的控制器在串列腔相互作用系统上进行了试验,该系统可被描述为S- MJLS。而在[1]和[2]中逗留时间的概率分布近似为指数分布,表明S-MJLS的行为与MJLS相似。在[88]中,我们提出了一个保证S-MJLS稳定性的数值可测试条件。为了进一步降低方法的保守性,开发了逗留时间划分技术。S-MJLSs的其他结果参见[88]及其文献。
In a more general framework, the sojourn-time follows any probability distribution which may not always take the exponential distribution. In such cases, the jump linear system is termed as a semi-Markov jump linear system [1]. Therefore, the set of MJLSs is a subset of the set of S-MJLSs. The relationship among MJLS and S-MJLS as well as jump linear system can be shown in Figure 3.1. Compared to the rich literature on MJLSs, relatively less research attention has been paid to S- MJLSs. In [1] and [2], a stochastic stability condition was established and a controller was designed based on the proposed stability condition. The designed controller was tested on a bunch-train cavity interaction system which can be formulated as an S- MJLS. However, the probability distributions of the sojourn-time in [1] and [2] were chosen as nearly exponential , which indicates that the S-MJLS behaves similarly as an MJLS. In [88], we proposed a numerically testable condition for ensuring the stability of the S-MJLS. To further reduce the conservativeness of the method, the sojourn-time partitioning technique was developed. For other results on S-MJLSs, please refer to [88] and the references therein.
另一方面,H无穷控制已被证明是衰减动态系统中扰动/噪声影响的有用工具[28,93]。H无穷控制源于频域的鲁棒稳定性问题,现在通常用于解决最优控制问题,即从干扰/噪声到时域输出的L2增益衰减。通过求解一组线性矩阵不等式(LMIs)[23],可以有效方便地设计H无穷控制器。H无穷控制器设计的MJLS系统带不带时滞已在过去几十年报告;参见[94,95,96]。与前面的工作相比,在本章中,我们考虑一个更普遍和实际的情形:从一种状态到另一种状态的转换趋势不再是恒定的;在这种情况下,如果采用成熟的MJLS方法,将会丢失转移率的时变信息,从而导致控制性能恶化;2)由于潜在状态跳变的评估失败,所提出的控制器或滤波器可能发生故障。
On the other hand, the H control has been proved to be a useful tool for attenu- ating the effect of disturbances/noises in dynamic systems [28, 93]. H control stems from the robust stability problem in the frequency domain, and it is now commonly used to solve the optimal control problems which attenuates the L2 gain from the disturbance/noise to the output of interest in the time domain. The H controller can be effectively and conveniently designed by solving a set of linear matrix inequal- ities (LMIs) [23]. The H controller design for MJLS with and without delays has been reported in the past decades; see, e.g. [94, 95, 96]. Compared to the aforemen- tioned work, in this chapter, we consider a more general and practical scenario: The switching tendencies/trends from one state to another are not constant any more;in this case, if the well-developed MJLS methods are applied, 1) the time-varying information of the transition rate will be missed, and accordingly the control perfor- mance will be deteriorated; 2) the proposed controller or filter may malfunction due the evaluation failure of potential state jumps.
除了实际系统的随机行为外,时滞的存在在许多应用中都是普遍存在的,并且在过去的几年里被广泛地研究[97]。时滞是机械工厂、化学过程和自动化系统中许多控制过程的固有特征[98]。一方面,众所周知,时间延迟会导致发散、振荡或不稳定[99]。另一方面,对常延迟和时变延迟的MJLSs系统的分析和综合问题进行了大量的研究。特别是在[16]中,我们考虑了在过渡率部分已知的情况下MJLSs的时间延迟效应。在这一章中,我们更进一步,过渡率并不部分已知,而是随时间变化的。然而,到目前为止,还没有关于变时滞S-MJLS的H无穷的最优控制的研究结果。
Besides the stochastic behavior of practical systems, the existence of time-delays is ubiquitous in many applications, and it has been studied extensively over the past years [97]. The time delay is an inherent feature of many control processes in mechanical plants, chemistry processes, and automation systems [98]. On one hand, it is well recognized that time delays can lead to divergence, oscillation, or instability [99]. On the other hand, considerable efforts have been devoted to the analysis and synthesis problems for MJLSs with constant delays as well as time- varying delays. Especially, the time delay effect on MJLSs with partially known transition rates has been considered in [16]. In this chapter, we move one step further, where transition rates are not partially known, but are time-varying. However, until now, no result has been reported for the H optimal control for the S-MJLS with time-varying delays, which motivates this research.
本章其余部分的组织如下。第3.2节给出了时滞S-MJLS的H无穷状态反馈控制设计问题。在第3.3节中,建立了保证变时滞S-MJLSs随机稳定性的充分条件,提出了H无穷控制设计方法。为了验证所提出的定理和推论,第3.4节提供了模拟研究。最后,结束语在3.5节中给出。
The remainder of this chapter is organized as follows. The H state-feedback control design problem for the delayed S-MJLS is formulated in Section 3.2. In Sec- tion 3.3, the sufficient conditions for ensuring the stochastic stability of S-MJLSs with time-varying delays are established and the H control design method is developed. To validate the proposed theorem and corollaries, simulation studies are provided in Section 3.4. Finally, the concluding remarks are given in Section 3.5.
3.2. 问题描述
考虑具有半马尔科夫跳变参数和时变状态时滞的切换系统
![\left\{\begin{matrix} \dot{x}=A(r(t))x(t)+A_d(r(t))x(t-\tau(t,(r(t))))+B(r(t))u(t)\\ z(t)=C(r(t))x(t)\\ x(s)=\phi(s), s \in [-d,0], r(0)=r_0 \end{matrix}\right.](http://img.e-com-net.com/image/info8/7b05dd614d0c4c75b652f9c15f9a0aec.gif) (3.1)
(3.1)
其中, 分别是系统状态,控制输入和系统输出。
分别是系统状态,控制输入和系统输出。 都是系统矩阵,依赖于半马尔可夫过程
都是系统矩阵,依赖于半马尔可夫过程![]() ,其中是一个连续时间-离散状态的半马尔可夫过程,在有限集合
,其中是一个连续时间-离散状态的半马尔可夫过程,在有限集合![]() 中取值。在后面,简写为
中取值。在后面,简写为 ,
,![]() 。同样地,以及
。同样地,以及![]() 被定为
被定为 和
和![]() 。因此,
。因此,![]() 是系统地时滞,并且:
是系统地时滞,并且:
![]() (3.2)
(3.2)
更多的,我们假设时滞地最大容许值是![]() ,并且
,并且![]() 。
。![]() 是初始状态,
是初始状态, 是半马尔可夫过程地初始模态。对于系统3.1而言,如果控制输入是0,也就是
是半马尔可夫过程地初始模态。对于系统3.1而言,如果控制输入是0,也就是![]() , 然后存在下列非强制系统:
, 然后存在下列非强制系统:
![\left\{\begin{matrix} \dot{x}=A(r(t))x(t)+A_d(r_t)x(t-\tau(t,r_t))\\ z(t)=C(r_t)x(t)\\ x(s)=\phi(s), s \in [-d,0], r(0)=r_0 \end{matrix}\right.](http://img.e-com-net.com/image/info8/c2447d9213134858b2ee0d272e3b634b.gif) (3.2)
(3.2)
半马尔可夫过程由下列给定[100]:
![]() (3.4)
(3.4)
其中:
![]() 是在t时刻时从模态i到模态j的转移概率,并且存在;
是在t时刻时从模态i到模态j的转移概率,并且存在;![]() 是小o标记,定义为
是小o标记,定义为![]() ;对于随机稳定性,我们采用[101]的定义。
;对于随机稳定性,我们采用[101]的定义。
定义3.1. 如果对于所有可能的有限初始函数![]() ,且所有可能的初始模态
,且所有可能的初始模态![]() ,非强制系统3.2是均方随机指数稳定的,使以下不等式成立:
,非强制系统3.2是均方随机指数稳定的,使以下不等式成立:
![]() (3.5)
(3.5)
其中 和分别称为衰减率和衰减系数。
和分别称为衰减率和衰减系数。
本章的目的主要有两个方面。
O1:建立(3.1)中跃迁率随时间变化的时滞S-MJLS的随机稳定性判据。
O2:设计一个H无穷状态反馈控制器,使闭环系统在规定的噪声衰减水平 下随机稳定。所设计的状态反馈控制器依赖于模式和驻留时间,其形式为
下随机稳定。所设计的状态反馈控制器依赖于模式和驻留时间,其形式为
![]() (3.6)
(3.6)
值得一提的是,控制增益K不仅依赖于半马尔可夫过程,还依赖于逗留时间h。
3.3 主要结论
本节首先讨论(3.3)中无强迫延迟S-MJLS的随机稳定条件。基于(3.5)中的随机稳定性定义,通过求解一组线性矩阵不等式给出控制器设计方法。
3.3.1 时滞S-MJLS的随机稳定性条件
下命题给出了(3.3)中系统的随机稳定性条件。
命题1. 带时滞的(3.3)中的S-MJLS系统实现均方意义下的随机指数稳定条件为:如果存在矩阵![]() ,同时
,同时![]() ,这样以下不等式对于所有
,这样以下不等式对于所有![]() 和
和
![]()
其中, 对于所有可能的h成立
对于所有可能的h成立
证明:
考虑到以下李雅普诺函数:
![]() (3.8)
(3.8)
其中
 (3.9)
(3.9)
![]() (3.10)
(3.10)
 (3.11)
(3.11)
设为无穷小生成子,可以看作是李雅普诺夫函数(3.8)的时间导数。可以证明:
(3.12)
注意到,![]() 并且
并且![]() ,可以得到:
,可以得到:
对公式3.7应用舒尔补定理可以得到,
![]() (3.13)
(3.13)
然后可以得到:
(3.14)
对于每个i和任意的标量β,可以得到:
(3.15)
注意到,
![]() (3.16)
(3.16)
这就意味着
(3.17)
应用广义的Dynkin公式[87],我们有
(3.18)
定义![]() ,则可以得到
,则可以得到

所以,对于每个![]() 以及任意标量
以及任意标量 ,可以得到:
,可以得到:
选择为下列等式地解
![]() (3.20)
(3.20)
继而式子3.20可以重写为:
 (3.21)
(3.21)
其中,
 ,
,
同时,![]() ,
, 是正定的。可以证明,
是正定的。可以证明,![]() 满足式子3.21。因此,我们可以总是得到使得式子3.20满足。
满足式子3.21。因此,我们可以总是得到使得式子3.20满足。
因此,可以得到:
![]() (3.22)
(3.22)
因此,系统达到均方随机指数稳定性。证明到此结束。
3.3.2 对于带有时滞的S-MJLS系统的H无穷控制器设计
考虑外部干扰 ,利用(3.6)中的反馈控制律
,利用(3.6)中的反馈控制律![]() ,使闭环系统变为
,使闭环系统变为
![\left\{\begin{matrix} \dot{x}(t)=A_c(r_t)x(t)+A_d(r_t)x(t-\tau(t,r_t))+B(r_t) \omega (t)\\ z(t)=C(r_t)x(t)\\ x(s)=\phi(s), s \in [-d,0], r(0)=r_0 \end{matrix}\right.](http://img.e-com-net.com/image/info8/97d8a38d7cfb48d9ba5e496dbb787a07.gif) (3.23)
(3.23)
其中,![]() 是一个指数噪音,并且
是一个指数噪音,并且![]() 被定义如下:
被定义如下:
![]() (3.24)
(3.24)
目标是设计控制信号u(t),使(3.23)中的时滞系统达到均方随机指数稳定性和满足
 (3.25)
(3.25)
在零初始条件下,对于任意的非零噪音![]() ,其中
,其中 定义为
定义为![]() 范数,并且
范数,并且
![\left \| z \right \| _{E_2} = \left [ \mathbb{E}\left \{ \int_{0}^{\infty } \left | z(t) \right | ^2 dt \right \} \right ]^{\frac{1}{2}}](http://img.e-com-net.com/image/info8/ee3d05f312fd4067b54c8a4724a0cf25.gif) (3.26)
(3.26)
其中, 是欧氏向量范数。
是欧氏向量范数。
其控制器设计技术被总结为以下定理。
定理3.1
如果存在对称矩阵 以及矩阵
以及矩阵![]() ,这些矩阵都具有适当的维数,使下列矩阵不等式对所有i,S和h>0都成立:
,这些矩阵都具有适当的维数,使下列矩阵不等式对所有i,S和h>0都成立:
(3.27)
其中,
![]() , (3.28)
, (3.28)
, (3.29)
那么闭环系统(3.23)是均方随机指数稳定的,并且具有γ扰动衰减水平。
证明
首先,我们将建立随机稳定性条件。根据命题1中提出的稳定性条件,当满足下列不等式集时,系统将是稳定的
![]() (3.30)
(3.30)
将(3.24)中的![]() 代入(3.30)得到:
代入(3.30)得到:
(3.31)
因为![]() ,定义
,定义![]() 。上一个不等式可以重写为:
。上一个不等式可以重写为:
(3.32)
将上一个不等式前后同乘以 ,可以得到,
,可以得到,
利用舒尔补定理,可以得到,
表示![]() ,考虑(3.27)中的条件,则最后一个不等式等价于,
,考虑(3.27)中的条件,则最后一个不等式等价于,
通过注意(3.27)和上述不等式,满足(3.5)中的条件,证明了系统是均方随机指数稳定的。
接下来,我们将证明满足(3.25)。考虑以下函数,
![J(T) = \int_{0}^{T} \left [ z^T(t)z(t) - \gamma ^2 \omega ^T(t) \omega (t) \right ]dt](http://img.e-com-net.com/image/info8/8a640f8c1a1c450d969ceac97d5d15d0.gif)
(3.25)显然等于当 ,
,![]() 。
。
其中,
![]() ,
,
(3.33)
将式子(3.27)前后同乘以以下变换矩阵 和
和 ,其中矩阵的维度是
,其中矩阵的维度是![]() 。
。
![\mathbb{T} = \left [ \begin{matrix} I & 0 & 0 & 0 & 0_{n,(N-1)n} \\ 0 & I & 0 & 0 & 0_{n,(N-1)n}\\ 0 & 0 & 0 & I & 0_{n,(N-1)n} \end{matrix} \right ]](http://img.e-com-net.com/image/info8/5a6b04cfef784551ad47c483c597773c.gif) ,
,
其中, 是一个
是一个 地单位矩阵,并且
地单位矩阵,并且![]() 是一个维度为
是一个维度为![]() 的零矩阵,然后我们可以得到
的零矩阵,然后我们可以得到![]() 。因此,达到了H无穷噪音衰减水平。证明完毕。
。因此,达到了H无穷噪音衰减水平。证明完毕。
备注3.1
通过观察(3.27)中的条件,![]() 和
和![]() 的介入影响了求解线性矩阵不等式的设计过程。通常,
的介入影响了求解线性矩阵不等式的设计过程。通常,![]() 和
和![]() 是时变的。因此,解决命题1和定理3.1中的条件涉及测试无穷多个LMIs,这在数值上是不可能的。这给随机稳定性分析和控制器设计方法带来了主要困难。更一般的,
是时变的。因此,解决命题1和定理3.1中的条件涉及测试无穷多个LMIs,这在数值上是不可能的。这给随机稳定性分析和控制器设计方法带来了主要困难。更一般的,![]() 是上下有界的,即,
是上下有界的,即,
![]() (3.34)
(3.34)
同样,![]() 也是有界的
也是有界的
 (3.35)
(3.35)
这里,![]() 。
。
备注3.2 在命题1中,涉及驻留时间h的剩余参数为![]() ,为待确定的未知矩阵。在这里,我们寻求能够满足无限个线性矩阵不等式的统一
,为待确定的未知矩阵。在这里,我们寻求能够满足无限个线性矩阵不等式的统一 。
。
为了克服数值上的困难,我们提出推论3.1。在继续之前,我们提出以下引理,这将有助于推论3.1的推导。
引理3.1 给定对称矩阵![]() ,定义以下集合:
,定义以下集合:![]() 。如果对于所有
。如果对于所有
(3.36)
使得 A<0,那么对于所有可能的
(3.37)
证明:
引理可以用归纳法证明。
(1)如果在![]() 只有一对不确定的对称项,不失一般性的,
只有一对不确定的对称项,不失一般性的,![]() ,然后从(3.36)可以的得到,对于
,然后从(3.36)可以的得到,对于![]() ,
,

其中, 是在
是在![]() 项为
项为![]() 的矩阵。最后一组不等式等价于,
的矩阵。最后一组不等式等价于,
![]() (3.38)
(3.38)
![]() (3.39)
(3.39)
其中α是一个常数。条件是θ1+θ2 = 1并且 θ1>0,θ2>0,同时乘以θ1到(3.38)和乘以θ2到(3.39),两个不等式的总和得出(3.37)。
(2)假设矩阵A中有p个不确定项,满足(3.37)。现在,我们给第(p + 1)项![]() 和
和![]() 引入不确定性。从(3.36)中可以得到,对于
引入不确定性。从(3.36)中可以得到,对于![]() ,
,
![]()
其等价于,
![]() ,
, 。
。
这里的β是独立于![]() 或是
或是![]() 的。同第一步类似,(3.37)也可以得到。对引理的证明现在完毕。
的。同第一步类似,(3.37)也可以得到。对引理的证明现在完毕。
引理3.2 引理3.1成立条件是:存在 ,并且还存在一个标量
,并且还存在一个标量 满足:
满足:
![]()
证明:采用归纳法,并在证明中遵循类似的技巧引理3.1、引理3.2很容易得到。
推论3.1 如果存在对称矩阵![]() ,
,![]() 和矩阵
和矩阵 ,这些矩阵都具有合适的维度,并且对于所有的
,这些矩阵都具有合适的维度,并且对于所有的![]() ,
,![]() 和
和![]() ,以下不等式成立:
,以下不等式成立:
(3.40)
其中,
![]() ,
,![]() ,
,![]() ,
,
![]() ,
,![\underline{\imath }^{(2)}_{i} = \left [ \underline{\lambda}_{i,1}I,...,\underline{\lambda}_{i,i-1}I,\underline{\lambda}_{i,i+1}I, ..., \underline{\lambda}_{i,N}I, \right ]](http://img.e-com-net.com/image/info8/f736a1f0d86a42ae919501fd91e624ce.gif)
并且![]() 在公式(3.28)中被定义。(3.23)中的闭环系统是均方随机指数稳定的γ扰动衰减水平。
在公式(3.28)中被定义。(3.23)中的闭环系统是均方随机指数稳定的γ扰动衰减水平。
证明
为了证明这个推论,我们最早定义了以下全等变换矩阵 。在用J对不等式(3.27)进行全等变换后,有
。在用J对不等式(3.27)进行全等变换后,有
(3.41)
其中,
![]() ,
,
![]() 。
。
定义![]() 为式子(3.41)的左边。定义和
为式子(3.41)的左边。定义和![]() ,并且定义
,并且定义 ,所以可以得到以下,
,所以可以得到以下,
利用引理3.2,则容易得到式(3.40)中的条件。这样证明就完成了。
3.3.3 保守性降低
值得注意的是推论3.1中的条件是保守的,因为公共变量![]() , ,
, ,  能够满足定理3.1中所示的无穷多个lmi。减少保守性的思想是通过引入更多的设计变量集来解决可行性,而不是使用一组
能够满足定理3.1中所示的无穷多个lmi。减少保守性的思想是通过引入更多的设计变量集来解决可行性,而不是使用一组![]() , , 矩阵[88]。通过划分逗留时间h的范围,可以将
, , 矩阵[88]。通过划分逗留时间h的范围,可以将![]() 和
和![]() 的跃迁率划分为不同的区间,称为分区。下面的推论演示了如何利用分区来降低H无穷控制器设计的保守性,方法是将驻留时间H划分为M个分区。
的跃迁率划分为不同的区间,称为分区。下面的推论演示了如何利用分区来降低H无穷控制器设计的保守性,方法是将驻留时间H划分为M个分区。
推论3.2
在每个分块m中,如果存在对称矩阵 ,
,![]() 和矩阵
和矩阵![]() 并且它们都具有适当的维数,使下列矩阵不等式对所有
并且它们都具有适当的维数,使下列矩阵不等式对所有![]() 和
和![]() ,
,
(3.42)
其中
![]() ,
,![]() ,
,
![]() ,
,
![]() ,
,![]()
那么闭环系统(3.23)是均方随机指数稳定的,具有γ扰动衰减水平。
证明
推论3.2的证明与推论3.1相似,因此在此省略。
3.4 数值例子
在本章中,我们考虑垂直起降(VTOL)飞行器测试[102,103]。系统动力学可以写成

其中,
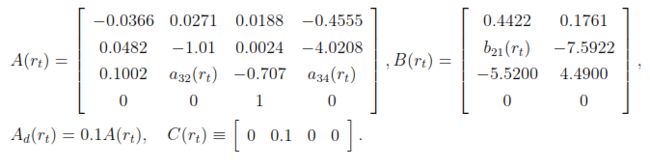
 是系统的状态向量,其中
是系统的状态向量,其中 是水平速度,
是水平速度,![]() 是垂直速度,
是垂直速度, 是俯仰角速度,
是俯仰角速度,![]() 是俯仰角。
是俯仰角。
为模拟目的,将最大延迟![]() 设为0.3s。(3.2)中的h1、h2、h3分别设为0.5、0.6、0.3。具有时变时延
设为0.3s。(3.2)中的h1、h2、h3分别设为0.5、0.6、0.3。具有时变时延![]() 的特征:
的特征:
![]() (3.43)
(3.43)
外部干扰![\omega (t)=\left [ \omega _1(t),\omega _2(t) \right ]^T](http://img.e-com-net.com/image/info8/5f59402d2d394d39a93557311032fa26.gif) ,其中
,其中![]() 和
和![]() 为零均值、方差统一的不相关高斯白噪声。
为零均值、方差统一的不相关高斯白噪声。
系统动力学依赖于以半马尔可夫过程模式为特征的空气速度。相关参数如表3.1所示。
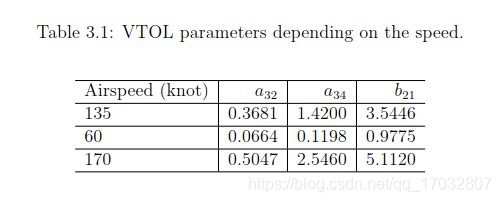
没有任何控制输入,非强制垂直起降系统是不稳定的。使用推论3.2,对逗留时间设置两个分区,即M=2。当h≤1.8s时,S-MJLS运行在分区1中,否则,S-MJLS运行在分区2中。对于每个分区,转移率的上界和下界为:


所设计的模态和驻留时间相关的状态反馈控制器
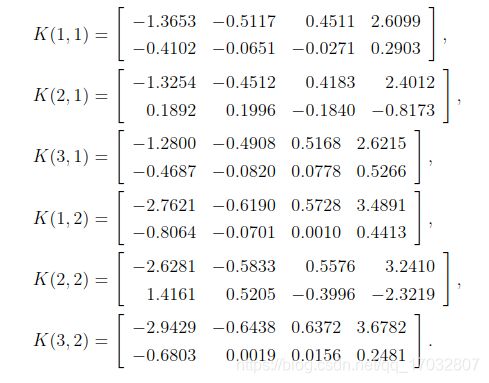
在数值分析中,模拟的初始状态为![]() 。在图3.2中,直升机的所有状态变量都是稳定的,即实现了直升机的悬停。然而,由于持续的外部干扰ω(t), x(t)并不收敛于0。在这个例子中,注意集中的状态变量是垂直速度,即
。在图3.2中,直升机的所有状态变量都是稳定的,即实现了直升机的悬停。然而,由于持续的外部干扰ω(t), x(t)并不收敛于0。在这个例子中,注意集中的状态变量是垂直速度,即![]() 。从图3.2可以看出,在扰动和系统延迟的情况下,垂直速度的大小从6m/s减小到小于1m/s。在控制器设计中,设H无穷衰减级为γ = 0.93,从仿真结果看,
。从图3.2可以看出,在扰动和系统延迟的情况下,垂直速度的大小从6m/s减小到小于1m/s。在控制器设计中,设H无穷衰减级为γ = 0.93,从仿真结果看, 。
。
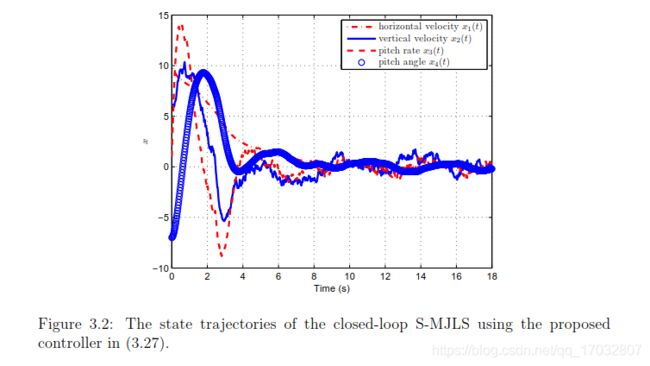
3.5 结论
研究了一类具有时变时滞的连续S-MJLSs的随机稳定性分析和H控制设计问题。所考虑的时变过渡率比MJLSs更具通用性和实用性。利用所设计的模态和逗留时间相关的状态反馈控制器,使闭环系统在规定的扰动衰减水平下保持随机稳定。值得期待的是,本章对S-MJLS的逗留时间划分的思想可以用来解决延迟S-MJLS的相关问题,如H无穷输出控制、最优动态控制器设计、鲁棒滤波等。在现实环境中,获得准确的随机过程转移率矩阵是一项具有挑战性的任务,因此对转移率不确定的S-MJLS的研究值得进一步研究,这将极大地促进其适用性。
4. 半马尔可夫模型方法的主动容错控制系统
4.1 介绍
由于其广泛的适用性,故障检测和容错控制问题受到越来越多的关注[104]。为了达到更高的可靠性水平和更好的控制性能,现代控制系统依靠复杂的控制算法来满足这些关键要求[105]。所设计的容错控制系统即使在发生故障事件的情况下,也能保持系统的稳定性和可接受的控制性能。一般来说,容错控制策略可以分为两大类:被动控制和主动控制[106]。在无源容错控制系统中,由于不需要对控制器进行重构,因此其容错能力是有限的。主动容错控制配置则相反,主动响应系统故障,通过调节控制动作来实现闭环系统的稳定性和所需的性能[107]。除了对控制方案进行分类外,系统故障还可以分为若干组,如执行器故障、传感器故障、部件故障,以及上述几种故障的组合[108]。在本章中,我们试图设计一种主动控制方法来适应上述故障的组合。
The fault detection and fault tolerant control problems have received increasing at- tention due to their broad applicability [104]. In order to achieve a higher reliability level and better control performance, modern control systems relying on sophisticated control algorithms have been developed to meet these critical requirements [105]. The designed fault tolerant control systems can achieve the system stability and maintain the acceptable control performance, even when they are subject to failure events. Generally speaking, fault tolerant control strategies can be categorized into two main categories: Passive control and active control [106]. In passive fault tolerant control systems, no reconfiguration of the controller is needed, so essentially it has limited fault tolerant capacities. On the contrary, active fault tolerant control configura- tion reacts to the system failure actively by adjusting control actions to achieve the stability and required performance of the closed-loop system [107]. Besides the clas- sification of the control schemes, the system faults can also be classified into several groups, such as actuator faults, sensor faults, component faults, and a combination of the above [108]. In this chapter, we seek to design an active control method to accommodate a combination of the above faults.
主动容错控制系统是一种实时调整控制律的反馈控制系统。系统里突然发生的故障可以经验地描述为受随机过程控制。受随机过程控制的这类系统称为跳变线性系统[70]。在这类系统中,定义了一个随机过程来表示系统参数的随机变化。通常,连续时间有限状态马尔可夫过程用于系统可能在任意时刻跳跃的连续时间系统;但在离散时间系统中,采用的是离散时间有限状态马尔可夫过程;精确地说,只使用了马尔可夫过程核。有时,有限状态过程也被称为离散状态过程或可数状态过程。为了切实地制定主动容错控制问题,在系统模型中涉及两个随机过程:一个用来建模系统故障,另一个用来表示故障检测和识别(FDI)过程[109]。双过程模型背后的理论基础是,外国直接投资过程将随机变化带入控制律。也就是说,FDI过程通过控制策略重构来修改系统动力学[110]。文献[111]提出了双过程模型,对单部件失效的系统提供了充分必要条件。对于多失效事件的系统,[112]提出了随机稳定性分析。此外,考虑到系统的不确定性、检测延迟和噪声/干扰,[113]报告了结果。除了稳定性问题的研究结果外,还研究了基于马尔可夫过程模型的容错控制系统的最优控制器设计问题;见[114]及其参考文献。
Active fault tolerant control systems are feedback control systems that reconfigure the control law in real time. The abrupt occurrence of faults in the system can be practically characterized as being governed by stochastic processes. The class of systems governed by stochastic processes is termed as the jump linear system [70]. In this class of systems, a stochastic process is defined to represent the random variations of the system parameters. Normally, continuous-time finite state Markov processes are used in continuous-time systems where the system may jump at any time instant; while in discrete-time systems, discrete-time finite state Markov processes are applied; to be precise, only Markov process kernels are used. Sometimes, finite state processes are also called discrete-state processes, or countable state processes. To practically formulate active fault tolerant control problems, two stochastic processes are involved in the system model: One is used to model the system faults, and the other one is used to represent the fault detection and identification (FDI) process [109]. The rationale behind the two-process model is that the FDI process brings random variations into the control law. In other words, the FDI process modifies the system dynamics by the control strategy reconfiguration [110]. The two-process model was proposed in [111], where necessary and sufficient conditions were provided for systems with single component failures. For the system with multiple failure occurrences, the stochastic stability analysis was presented in [112]. Further, considering the system uncertainties, detection delays, and noise/disturbances, results have been reported in [113]. Besides the results on the stability issue, optimal controller design problems have been studied for fault tolerant control systems modeled by Markov processes; see [114] and the references therein.
对于上述所有的工作,他们中的大多数部署连续时间或离散时间马尔科夫过程来建模系统故障。为了满足马尔可夫过程的要求,假设系统构件的生命周期是指数分布的。然而,这种假设在实践中可能并不合适,原因有二。首先,在可靠性工程中,典型的过渡/故障率函数是浴缸形的,而不是恒定值[75,76]。有了这种过渡/失败率的形状,系统组件更有可能在”婴儿“或”老年“阶段失败。为了对时变甚至随机转移率进行更全面的文献综述,见[115]及其参考文献。在本章中,为了简单起见,我们采用了切换系统理论中的术语“转移概率”,它在数学上等同于可靠性工程中的”故障率“。其次,假设连续时间概率分布函数(PDF)为指数分布,即转移率为常数,这是可靠性工程中广泛使用的假设[116]。冗余设计发现以来在临床上有很广泛的应用,例如,在飞机飞行线控系统设计(117、118),整个寿命概率分布函数将不是指数函数(图4.1中的红色和蓝色曲线),并且相应的过渡率不是常量值(图4.2中红色和蓝色曲线)。因此,在本章中,我们研究了组件寿命不一定是指数分布的容错控制系统。因此,半马尔可夫过程更适合建模系统中的随机变化/跳变。一些相关结果已被报道;例如[119],使用连续时间可数(离散)状态半马尔可夫过程来表征对象的失效现象。在跳跃线性系统研究领域,已经部署和研究了半马尔可夫过程[2,78,88,120]。
For all the aforementioned work, most of them deploys continuous-time or discrete- time Markov processes to model the system failure. To satisfy the requirements of Markov processes, the life time of the system components should be assumed to be exponentially distributed. However, such an assumption may not be appropriate in practice for two reasons. Firstly, in the reliability engineering, a typical transi- tion/failure rate function is in a bathtub shape instead of a constant value [75, 76]. With such shapes of transition/failure rates, the system components would be more likely to fail in the infant or senior stages. For a more comprehensive literature review on time-varying and even random transition rates; see [115] and the references therein. In this chapter, for simplicity, we adopt the terminology transition rate from switching system theory, and it is mathematically equivalent to the failure rate in the reliability engineering. Secondly, suppose that the continuous-time prob- ability distribution function (PDF) is an exponential distribution, i.e., the transition rates are constant, which is a widely used assumption in reliability engineering [116]. Since the redundancy design finds wide applications in practice, for example, in the fly-by-wire aircraft system design [117, 118], the overall life time probability distri- bution function will not be exponential (red and blue curves in Figure 4.1) and the corresponding transition rates are not constant values (red and blue curves in Fig- ure 4.2). Therefore, in this chapter, we investigate the fault tolerant control system where the life time of the components is not necessarily exponentially distributed. Therefore, the semi-Markov process is more appropriate for modeling the random changes/jumps in the system. Some related results have been reported; for example, in [119], a continuous-time countable (discrete) state semi-Markov process was used to characterize the failure phenomenon of an object. In the field of jump linear system research, semi-Markov processes have been deployed and studied [2, 78, 88, 120].
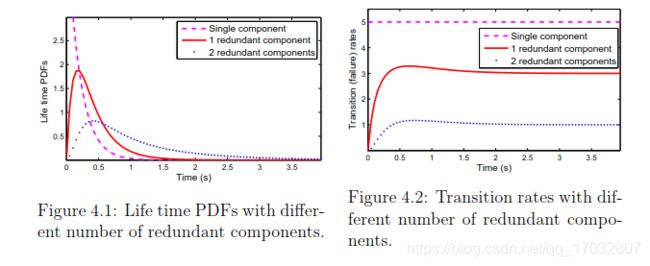
本章其余部分的组织如下。在4.2节中,我们利用半马尔可夫过程来描述故障检测问题。接下来,我们将在第4.3节中介绍随机稳定性分析的主要结果,以及所述容错控制系统的控制器设计技术。在第4.4节中,给出了垂直起降(VTOL)飞行器的仿真实例。最后,我们在4.5节中结束本章。
The remainder of this chapter is organized as follows. In Section 4.2, we formulate the fault detection problem by using semi-Markov processes. Next, we present the main results for the stochastic stability analysis and the controller design technique for the formulated fault tolerant control system in Section 4.3. In Section 4.4, a vertical take-off and landing (VTOL) vehicle simulation example is presented. Finally, we conclude this chapter in Section 4.5.
4.2 问题描述
在这一章中,我们考虑系统故障和主动容错控制策略同时由独立半马尔可夫过程控制的线性系统。系统模型如下:
 (4.1)
(4.1)
其中,![]() 是状态;
是状态;![]() 是系统输出;
是系统输出;![]() 是系统的控制输入;并且
是系统的控制输入;并且![]() 是外部干扰。
是外部干扰。![]() 是拥有适当维度的系统矩阵。
是拥有适当维度的系统矩阵。 是半马尔可夫过程,将会在后面讨论。为了便于标注,当
是半马尔可夫过程,将会在后面讨论。为了便于标注,当 时,
时,![]() 被重新定义为
被重新定义为 ;类似的
;类似的![]() 也进行简化。同样,
也进行简化。同样,![]() 分别重写为
分别重写为 。
。
备注4.1:
系统故障用系统矩阵表示。例如,在正常工作状态下,系统矩阵为![]() 。例如,如果一个传感器工作不正常,那么
。例如,如果一个传感器工作不正常,那么![]() 中的元素可能会变化,甚至在完全失败的情况下被设置为0。在这样的故障场景中,操作系统矩阵将是
中的元素可能会变化,甚至在完全失败的情况下被设置为0。在这样的故障场景中,操作系统矩阵将是![]() 、
、![]() 、
、 和
和![]() 。另一种经常遇到的故障是所谓的驱动故障。在这种情况下,操作系统矩阵是
。另一种经常遇到的故障是所谓的驱动故障。在这种情况下,操作系统矩阵是![]() 、
、 ![]() 、
、 ![]() ,和
,和 。同样地,通过调整
。同样地,通过调整![]() ,可以适当地模拟由外部干扰引起的故障。因此,切换系统模型可以适应不同类型的故障场景。
,可以适当地模拟由外部干扰引起的故障。因此,切换系统模型可以适应不同类型的故障场景。
设![]() 为FDI过程;它监视
为FDI过程;它监视![]() 的状态,该状态描述失败[110]。由于FDI过程对控制行为产生了随机切换,因此当控制器用于闭环系统时,通过控制重构,闭环系统动力学将随之随时间变化。在这里,我们假定和
的状态,该状态描述失败[110]。由于FDI过程对控制行为产生了随机切换,因此当控制器用于闭环系统时,通过控制重构,闭环系统动力学将随之随时间变化。在这里,我们假定和 是连续时间离散状态半马尔可夫过程,它们的值在有限集
是连续时间离散状态半马尔可夫过程,它们的值在有限集 和
和![]() 中。连续时间是指系统可以随时从一种状态切换到另一种状态;离散状态是指集合
中。连续时间是指系统可以随时从一种状态切换到另一种状态;离散状态是指集合![]() 和
和![]() 是离散集合。这是现实的,因为在连续时间系统配置的操作过程中,组件随时都可能出现故障。因此,系统描述依赖于真实的失效状态;同时,检测和识别系统故障后,输入信号u依赖于控制策略。
是离散集合。这是现实的,因为在连续时间系统配置的操作过程中,组件随时都可能出现故障。因此,系统描述依赖于真实的失效状态;同时,检测和识别系统故障后,输入信号u依赖于控制策略。
对于半马尔可夫失效过程,时滞转移概率由下式给定

这里,
 ,
,![]() 与系统部件故障率直接相关。
与系统部件故障率直接相关。
因为是决定和控制过程,而转移率直观地依赖于,并被定义为:

当系统在模态i时,。这里, 。转移概率矩阵被定义为:
。转移概率矩阵被定义为:![\Lambda (h) = \left [ \lambda_{ij}(h) \right ]](http://img.e-com-net.com/image/info8/0584bfa037bd4f89997dd0da12853f40.gif) 和
和![\Pi^{(i)} (h) = \left [ \pi^{(i)}_{ij}(h) \right ]](http://img.e-com-net.com/image/info8/55338e354ae942a989044c7f8b630d7f.gif) 。在本章中,我们假设转移率都是上下有界的[121]。在FDI过程难以检验的情况下,可以在控制器中实现半马尔可夫过程的简化版本,即马尔可夫过程。利用马尔可夫过程,控制器在计算控制信号时丢失了时变的转移率信息。为了得到转移概率,在确定转移概率矩阵之前,需要对系统进行实验测试。Xie等人提出了两种确定转移概率参数的方法:1)传统随机统计技术和2)图论方法[76]。当随机过程的参数数较小时,提出了传统的统计估计方法;而当参数数目增加时,图论技术是首选的。
。在本章中,我们假设转移率都是上下有界的[121]。在FDI过程难以检验的情况下,可以在控制器中实现半马尔可夫过程的简化版本,即马尔可夫过程。利用马尔可夫过程,控制器在计算控制信号时丢失了时变的转移率信息。为了得到转移概率,在确定转移概率矩阵之前,需要对系统进行实验测试。Xie等人提出了两种确定转移概率参数的方法:1)传统随机统计技术和2)图论方法[76]。当随机过程的参数数较小时,提出了传统的统计估计方法;而当参数数目增加时,图论技术是首选的。
备注4.2
驻留时间是本章的一个重要概念。在跳变线性系统中,两个连续跳变之间的持续时间h称为驻留时间,它通常是一个随机变量。例如,在连续时间跳变线性系统中,h是一个随机变量,其特征是一个连续的概率分布F。特别是在连续时间马尔可夫跳变线性系统中,F是一个指数分布。然而,在现有的半马尔可夫框架中,F可以是任意连续的概率分布,使得相应的描述更加普遍和实用。因此,处理主动容错控制问题的马尔可夫跳变线性系统方法可以视为本章所提出方法的一个特例。
备注4.2
值得注意的是,无记忆性是马尔可夫过程的一个重要性质,但它并不适用于半马尔可夫过程。根据随机过程理论,在马尔可夫过程中,转移概率不依赖于过去,即 [72]。但在我们目前的设计框架中,由于非指数逗留时间分布,上述等式不再成立,这必然会给接下来的设计过程带来一些挑战。
[72]。但在我们目前的设计框架中,由于非指数逗留时间分布,上述等式不再成立,这必然会给接下来的设计过程带来一些挑战。
本章的主要目标是设计状态反馈控制器 ,在备注4.1中所述的任何可能的故障类型下,使下面的闭环系统
,在备注4.1中所述的任何可能的故障类型下,使下面的闭环系统
![]() (4.2)
(4.2)
在没有外部干扰的情况下,比如 ,具有随机稳定性能,但同样的,应当同时保证系统的H无穷性能,这里,
,具有随机稳定性能,但同样的,应当同时保证系统的H无穷性能,这里,
![]() (4.3)
(4.3)
其中,![]() ,则
,则![]() 。现在我们回忆一下[53]中建立的具有半马尔可夫跳变的随机闭环系统的随机稳定性定义。
。现在我们回忆一下[53]中建立的具有半马尔可夫跳变的随机闭环系统的随机稳定性定义。
定义4.1
系统4.2是随机稳定成立的条件是:对于所有的初始状态![]() ,以及初始模态
,以及初始模态![]() 和
和![]() ,存在一个有限矩阵
,存在一个有限矩阵 使得下式成立:
使得下式成立:
 (4.4)
(4.4)
H无穷控制性能定义如下:给定标量 ,对于任意非零
,对于任意非零 ,闭环系统的期望是随机稳定的的条件是
,闭环系统的期望是随机稳定的的条件是
![]() (4.5)
(4.5)
为了更一般的设置和更广泛的应用,我们采用随机积分二次约束(SIQC)[122]。
定义4.2
如果下列不等式成立,则SIQC的输出信号 和扰动
和扰动 得到满足,
得到满足,
(4.6)
其中, 是对称且正定的,
是对称且正定的,![]() 是对称且负定的,还有,假设
是对称且负定的,还有,假设 ,并且时间T是有界的。
,并且时间T是有界的。
备注4.4
SIQC中涉及的四个矩阵应该具有兼容的维数。通过调整这些矩阵,所提出的控制器可以实现不同的控制性能。例如,如果![]() 和
和![]() ,则SIQC约束降低为标准的H无穷性能。因此,在本章中,控制设计技术比传统的H无穷控制方法更具通用性。
,则SIQC约束降低为标准的H无穷性能。因此,在本章中,控制设计技术比传统的H无穷控制方法更具通用性。
在给出主要结果之前,下面的推导中经常提到的事实如下所示。
事实1
对于可以被分块为![]() 的矩阵
的矩阵 ,如果存在一个矩阵
,如果存在一个矩阵![]() 和一个标量
和一个标量 使得
使得![]() ,那么
,那么 。
。
4.3 主要结论
镇定问题和H无穷控制问题将在本节中讨论。首先,我们在4.3.1节处理随机稳定性问题。下面的定理提供了充分条件,使(4.1)中具有![]() 的系统满足定义4.1中的条件。其证明与[110]的证明类似,但考虑了使用半马尔可夫过程模型的更一般的模型。
的系统满足定义4.1中的条件。其证明与[110]的证明类似,但考虑了使用半马尔可夫过程模型的更一般的模型。
4.3.1随机稳定
定理4.1
(4.2)中的闭环系统是随机稳定的条件是:对于所有![]() ,存在一组矩阵
,存在一组矩阵![]() 和
和![]() ,
,
(4.7)
其中,
(4.8)
(4.9)
证明:
当闭环系统在模式![]() 上工作时,即在时刻t时,
上工作时,即在时刻t时, ,考虑以下李亚普诺夫函数
,考虑以下李亚普诺夫函数
![]() (4.10)
(4.10)
这里,![]() ,因此对于所有
,因此对于所有![]() ,
,![]() 。李雅普诺夫函数的无穷小产生子为
。李雅普诺夫函数的无穷小产生子为
(4.11)
![\tilde{A} V = lim_{\Delta \rightarrow 0} \frac{1}{\Delta }\left [ \mathbb{E} \left \{ x^T_{t+\Delta } P_{ik} x_{t+\Delta } |x_t, \eta_t,r_t \right \} - x^T_t P_{ik} x_t \right ]](http://img.e-com-net.com/image/info8/b878d42fafb64a34826ec3f101c97951.gif) (4.12)
(4.12)
其中,∆> 0是一个小正数。 的一阶展开为
的一阶展开为
![x_{t+\Delta } = \left [ A_i \Delta +B_i K(k,h)\Delta +I \right ]x_t + o\left ( \Delta ^2 \right )\approx \left [ A_i \Delta +B_i K(k,h)\Delta +I \right ]x_t](http://img.e-com-net.com/image/info8/7eeed29dd0df450b890f4d14cfa25cf7.gif)
假设∆很微小,则可以推导出
(4.13)
因此,根据二次型的性质,如果下列不等式成立,则系统是随机稳定的
 (4.14)
(4.14)
为了便于下面的推导,进一步定义![]() ,然后前后分别将最后一个不等式乘以
,然后前后分别将最后一个不等式乘以 ,我们有
,我们有
(4.15)
利用Schur补,就得到了最后一个不等式
(4.16)
其中, 和
和![]() 在式子(4.8)和(4.9)中定义。进一步定义
在式子(4.8)和(4.9)中定义。进一步定义![]() ,并将(4.3)中的
,并将(4.3)中的![]() 代入最后一个不等式中,则可以很容易地证明该定理。
代入最后一个不等式中,则可以很容易地证明该定理。
定理4.1中的条件由于涉及到![]() 和
和![]() ,不方便检验。注意到
,不方便检验。注意到![]() 和
和![]() 都是上下有界的,因此定理4.1中的条件可以进一步放宽,得到如下推论:
都是上下有界的,因此定理4.1中的条件可以进一步放宽,得到如下推论:
推论4.1
(4.2)中的闭环系统是随即稳定的如果:如果存在一系列![]() 和
和![]() ,对于
,对于![]() 和
和![]() 存在,
存在,
(4.17)
其中,
(4.18)
(4.19)
这里,![]() 分别是
分别是![]() 的上界。类似的,
的上界。类似的, 分别是
分别是![]() 的下界。因为
的下界。因为 ,其值得注意的是:
,其值得注意的是:
 (4.20)
(4.20)
证明: 考虑到事实1,这个推论很容易被证明。
4.3.2 控制性能
在本节中,我们将提出控制设计技术,以确保规定的干扰衰减水平。下面的定理给出了充分的条件。
定理4.2 如果存在一系列矩阵![]() 和
和![]() ,并且对于所有的
,并且对于所有的![]() 和
和![]() ,存在以下矩阵不等式:
,存在以下矩阵不等式:
(4.21)
那么(4.2)中的系统在规定的扰动衰减水平下是随机稳定的。其中,和![]() 在定理4.1中给出。
在定理4.1中给出。
证明
当闭环系统作用于模![]() 时,在定理4.1的证明中,我们使用了相同的李雅普诺夫函数V(·)。定义以下索引
时,在定理4.1的证明中,我们使用了相同的李雅普诺夫函数V(·)。定义以下索引
(4.22)
因此,如果以下不等式成立,则可以建立稳定性,同时保证控制性能。
(4.23)
将(4.2)中的闭环系统代入最后一个不等式得到
(4.24)
(4.24)的前后乘以![]() ,则有
,则有
(4.25)
应用Schur补码,让T趋于无穷,可以满足(4.6)中的条件。这样证明就完成了。
由于![]() 和
和![]() 的存在,上述条件不存在线性形式。由于
的存在,上述条件不存在线性形式。由于![]() 和
和![]() 都有上下界,定理4.2中的条件可以放宽。然后我们得到以下推论。
都有上下界,定理4.2中的条件可以放宽。然后我们得到以下推论。
推论4.2 系统随机稳定的条件是:如果存在一组矩阵![]() 和
和![]() ,对于所有的
,对于所有的![]() 和
和![]() ,使得
,使得
(4.21)
其中, 分别被定义在(4.18)和(4.19)中;
分别被定义在(4.18)和(4.19)中;![]() 在(4.20)中被定义了。
在(4.20)中被定义了。
逗留时间划分技术被证明是进一步降低控制器综合保守性的一种有效方法[88]。通过应用这种技术,我们得到了以下推论。
推论4.2 系统随机稳定的条件是:如果存在一组矩阵![]() 和
和![]() ,对于所有的
,对于所有的![]() ,
,![]() 和
和![]() ,使得
,使得
(4.27)
其中:m是分段标号;
;
;
 。
。
证明:利用事实1,可以很容易地得到这两个推论中的条件。
4.4 数值实验
在本节中,为了证明之前得到的结果的有效性,我们考虑一个垂直起降(VTOL)飞行器的例子,取自[102,123]。系统状态为 ,其中是水平速度,
,其中是水平速度,![]() 是垂直速度,是俯仰角速度,
是垂直速度,是俯仰角速度,![]() 是俯仰角。为节省空间,例中只考虑了一种类型的故障,因此
是俯仰角。为节省空间,例中只考虑了一种类型的故障,因此![]() 。系统状态空间模型有以下系统矩阵:
。系统状态空间模型有以下系统矩阵:
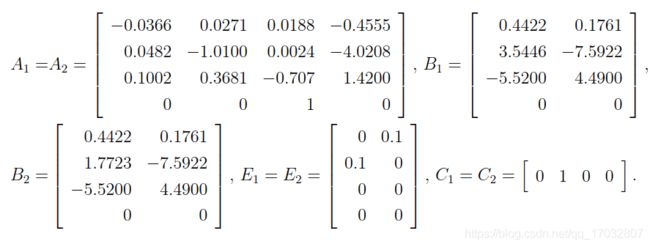
感兴趣的是垂直速度![]() ,并且假设与输出相关的传感器没有发生故障,所以
,并且假设与输出相关的传感器没有发生故障,所以![C_1 = C_2 = [0,1,0,0]](http://img.e-com-net.com/image/info8/224d7dffb6a648b6a262cfcbb4f74304.gif) ,也就是说
,也就是说![]() 。这里,
。这里,![]() 都是正常工作状态下的系统系数,而
都是正常工作状态下的系统系数,而 是当一个失败发生时的系统矩阵。故障情况是俯仰控制输入
是当一个失败发生时的系统矩阵。故障情况是俯仰控制输入 到垂直速度
到垂直速度![]() 损失了50%有效性,例如,
损失了50%有效性,例如,![]() 。由于
。由于![]() ,两个支配随机过程和的值分别为
,两个支配随机过程和的值分别为![]() 和
和![]() 。的转移概率矩阵是时变的,其上下界分别时
。的转移概率矩阵是时变的,其上下界分别时![]() 和
和 。同样,随时间变化的转移概率矩阵上下界f分别为
。同样,随时间变化的转移概率矩阵上下界f分别为 和
和![]() 。我们通过上界和下界的中点将过渡率分为两部分,所以
。我们通过上界和下界的中点将过渡率分为两部分,所以 。由此产生的闭环系统根据两个随机过程(和)的状态进行切换。例如,在第一段中,垂直起降机正常运行时
。由此产生的闭环系统根据两个随机过程(和)的状态进行切换。例如,在第一段中,垂直起降机正常运行时![]() 和
和![]() 指挥控制策略切换方案;当垂直起降机出现上述故障时
指挥控制策略切换方案;当垂直起降机出现上述故障时![]() 和
和 指挥。在这里,我们假设故障过程的先验转移率在控制器设计之前已经确定并已知。所有的上界和下界如下所示:
指挥。在这里,我们假设故障过程的先验转移率在控制器设计之前已经确定并已知。所有的上界和下界如下所示:

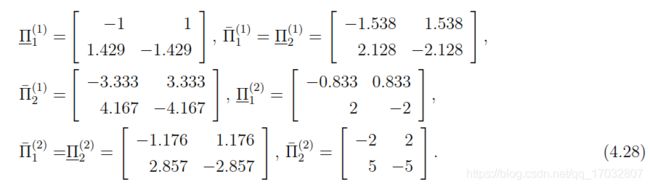
系统处于连续时域,从![]() 和
和![]() 来看,和有两种可能的状态。因此,本VTOL例子满足随机过程的连续时间离散状态条件。
来看,和有两种可能的状态。因此,本VTOL例子满足随机过程的连续时间离散状态条件。
在H控制器设计中,γ被设置为1.5,因此在SIQC的参数为:

为了比较不同推论的结果,提出了不划分![]() 和划分
和划分 的控制器。状态反馈控制增益给出如下:
的控制器。状态反馈控制增益给出如下:
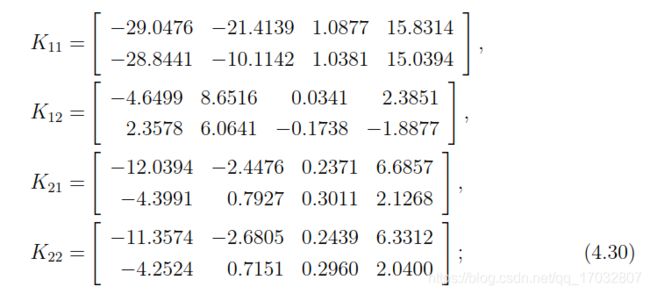

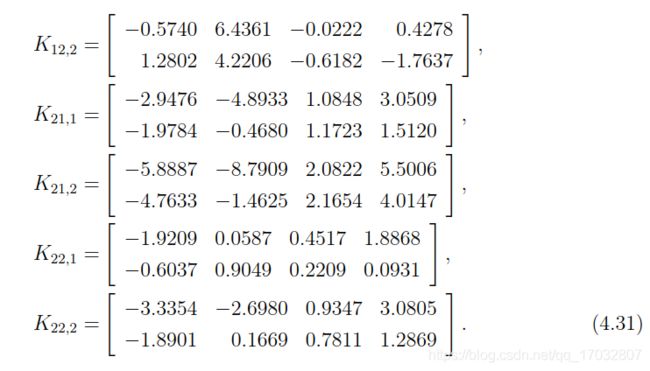
在仿真中,初始状态为![]() ,
, ,
, 。外部干扰
。外部干扰 是一个零均值、方差为1的白噪声。故障发生序列由上述转换矩阵生成。为了更清晰地观察,故障序列的前19秒,而不是模拟过程中的3秒在图中显示(图4.3)。当
是一个零均值、方差为1的白噪声。故障发生序列由上述转换矩阵生成。为了更清晰地观察,故障序列的前19秒,而不是模拟过程中的3秒在图中显示(图4.3)。当![]() 时,闭环控制系统在正常状态工作;当
时,闭环控制系统在正常状态工作;当![]() 时,随机故障发生;(4.30)中通过控制器控制
时,随机故障发生;(4.30)中通过控制器控制 的状态轨迹如图4.4所示。从仿真结果来看,
的状态轨迹如图4.4所示。从仿真结果来看,![]() 。作为对照,用(4.31)控制器的状态轨迹在图4.5中显示,并且
。作为对照,用(4.31)控制器的状态轨迹在图4.5中显示,并且![]() 。在干扰衰减等级γ = 1.5的条件下,实现了系统的H∞控制性能。
。在干扰衰减等级γ = 1.5的条件下,实现了系统的H∞控制性能。
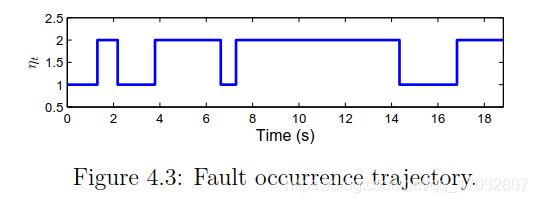
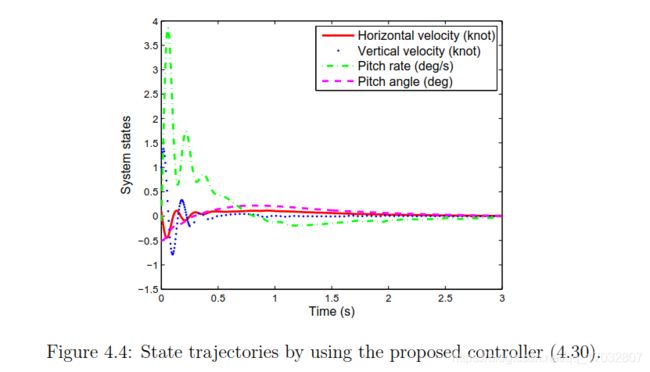

为了进行蒙特卡罗仿真,使用所计算的两个控制器进行了100次仿真。对于每一轮模拟,半马尔可夫过程和是根据(4.28)中的转移概率矩阵随机生成的。从蒙特卡罗模拟的结果可以看出,利用驻留时间划分技术可以大大降低超调量。对于这100个模拟,图4.8总结了从扰动到输出的比值。在定量上,该控制器抑制了扰动衰减程度。
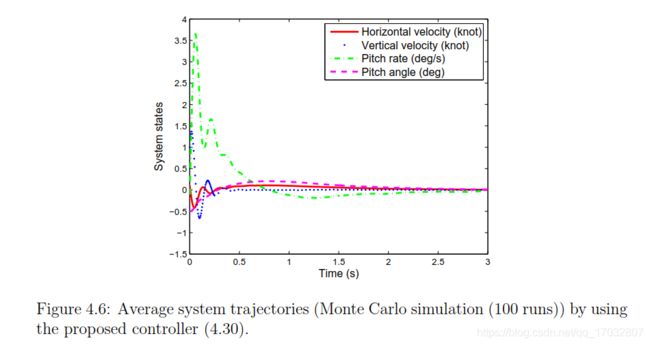
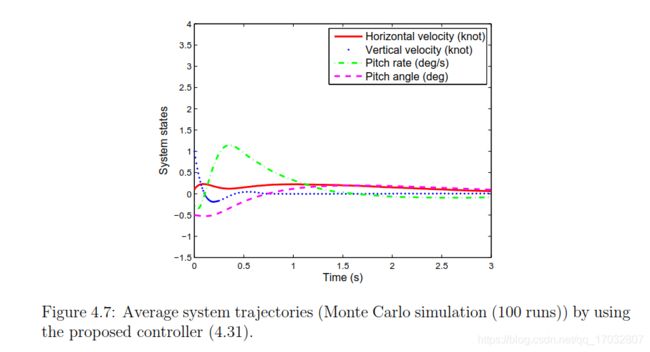
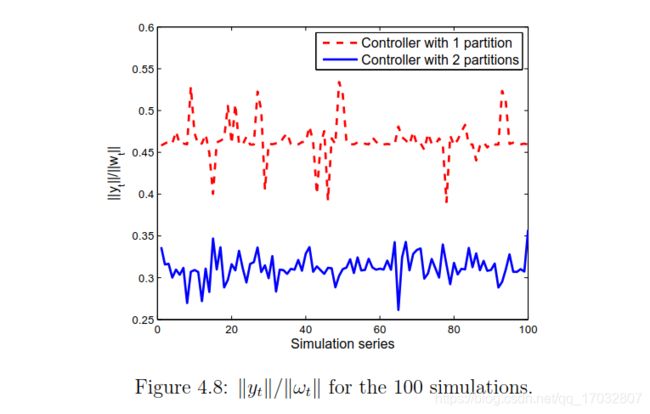
备注4.6
定量地观察到,使用分区技术可以显著减少状态的超调,特别是对于输出信号,即垂直速度。在相同的扰动条件下,输出信号的范数也得到了降低。值得注意的是,改进的瞬态性能并不是通过增加控制增益(例如,![]() ),这可能会使执行器饱和。相反,它是通过在操纵控制信号方面增加更多的自由度来实现的。
),这可能会使执行器饱和。相反,它是通过在操纵控制信号方面增加更多的自由度来实现的。
4.5 结论
摘要针对具有半马尔可夫过程特征的结构突变线性系统,提出了一种新的容错控制策略。在稳定性分析和H性能分析的基础上,设计了一种可靠的主动容错状态反馈控制器。设计过程可以离线完成;一旦确定了控制增益,在运行过程中就不需要在线计算控制参数。通过测量逗留时间,控制器可以确定系统运行在哪个分区上,并相应地选择适当的控制增益。该方法已应用于一个垂直起降飞行器模型。在不同控制器参数下进行了仿真,验证了所提方法的有效性。此外,从每次运行中随机生成随机过程的蒙特卡罗模拟可以得出结论,所提出的控制器是可靠的,干扰衰减水平可以显著降低(图4.8)。
未来的工作将集中于改进现有系统和可能存在不确定性的系统的控制性能。首先,(4.1)中的状态空间模型在实践中可能存在模型不确定性,例如范数有界不确定性或多面体不确定性。因此,![]() ,其中
,其中 表示名义上的系统动力学,
表示名义上的系统动力学,![]() 表示可能的系统不确定性。其次,可以采用最优控制策略,如H2控制和H无穷控制,提高控制性能,降低干扰衰减水平。最后,除了本章使用的纯反馈增益外,更高阶反馈控制器,例如动态控制器,可以潜在地减少稳态误差。
表示可能的系统不确定性。其次,可以采用最优控制策略,如H2控制和H无穷控制,提高控制性能,降低干扰衰减水平。最后,除了本章使用的纯反馈增益外,更高阶反馈控制器,例如动态控制器,可以潜在地减少稳态误差。
5. 用历史数据进行网络控制系统的设计
5.1 介绍
在过去的几年里,NCSs的建模、控制和滤波问题已经被进行了广泛的研究[33,70,124]。在传统的NCSs中,设备的传感器位于同一位置;因此,设备的测量数据可以同时以一个数据包的形式发送到控制器。近年来,随着传感器技术的快速发展,将不同传感器提供的数据结合起来成为控制界的一个重要研究方向[125]。特别是,不同的通信协议正在开发中,这些协议将用于下一代NCSs,如WirelessHART[126]、ZigBee[127]、ISA100[128]。感兴趣的读者参阅[129]及其参考文献。在现代的NCSs中,通常使用分布式传感器进行测量[130]。与传统的控制系统不同,分布式传感器配置提高了控制系统的可靠性和鲁棒性,提高了测量的分辨率,扩大了覆盖范围[131]。在享受这些优势的同时,新的问题也出现了。以智能建筑系统为例,空间分布式传感器检测建筑物的气体、噪声、温度和湿度,并通过共享接口设备将信息传输给中央控制器[132]。使用共享接口,控制器不能同时接受来自所有传感器的数据。另一个例子是状态估计问题,在数据发生无序排列时,中央控制器通过通信网络使用物理分布式传感器提供的信息来估计复杂控制系统的状态[133]。
The modeling, control, and filtering problems for NCSs have been studied extensively over the last few years [33, 70, 124]. In the conventional NCSs, the sensors of the plant are located at the same place; as a result, the measurements of the plant can be sent to the controller within one data packet at the same time. Recently, with the fast development of the sensor technology, a significant research interest in the control society has been devoted to combining the data supplied by different sensors [125]. Especially, different communication protocols are being developed, which will be used in the next generation NCSs, such as WirelessHART [126], ZigBee [127], ISA100 [128]. The interested readers are referred to [129] and the references therein. In a modern NCS, it is common to have distributed sensors for the measurements [130]. Different from the conventional control system, the distributed sensor configuration enhances the reliability and robustness of the control system, improves the resolution of the measurement, and extends the coverage [131]. While enjoying these advantages, new problems arise. Take the intelligent building system as an example, the spatially distributed sensors detect the gas, noise, temperature and humidity of the building and transmit the information to the central controller by shared interface device [132]. Using the shared interface, the controller cannot accept the data from all sensors at the same time. Another example is the state estimation problem where the out of sequence of data occurs, and the central controller estimates the state of a complex control system by using the information provided by physically distributed sensors through communication networks [133].
尽管关于以稳定闭环网络控制系统为目标的控制器设计问题有丰富的文献,但在实际系统中,人们总是希望提出一种不仅能稳定被控对象而且能满足一定控制性能的控制器。一种广泛使用的控制策略是所谓的保成本控制[134]。网络控制系统的保成本控制通常被称为保成本网络控制(GCNC)[135]。GCNC寻求稳定的闭环系统,同时保证规定的系统性能方面的成本函数。例如,Wu等人提出了满足特定控制性能的离散网络控制系统的静态反馈控制器[136]。同样在[137]中,作者考虑了一类具有不确定性的NCSs的保成本控制问题,其中开发了一种改进的预测控制器来补偿通信链路中的通信延迟和包丢失。除了线性系统外,GCNC也被应用于非线性NCSs,其时滞可以用T-S模糊模型来表示[138]。
Despite the rich literature on the controller design problem that aims to stabilize the closed-loop NCS, in practical systems, it is always desirable to propose a controller that not only stabilizes the plant but also satisfies certain control performance. A widely used control strategy is the socalled guaranteed cost control [134]. The guaranteed cost control for the NCS is often referred to as the guaranteed cost networked control (GCNC) [135]. The GCNC seeks to stabilize the closed-loop sys- tem and simultaneously guarantees a prescribed system performance in terms of a cost function. For example, Wu et al. proposed the static state feedback controller for the discrete-time NCS which satisfied the specific control performance [136]. Also in [137], the authors considered the guaranteed cost control problem for a class of NCSs with uncertainties where an improved predictive controller was developed to compensate for the communication delays and packet dropouts in the communication links. Apart from linear systems, GCNC was also applied to the nonlinear NCSs where the time delays can be represented by T-S fuzzy models [138].
对于空间分布的传感器,传感器和控制器之间的连接将是多通道链路。在本章中,我们考虑NCSs,其中每个单独的传感器测量一个状态信息,并通过单独的通信通道将测量结果传输给控制器。在[136]中,研究了多通道网络控制系统的数据包丢失和无序问题,其中保成本控制器可以通过求解一组线性矩阵不等式(LMIs)来提出。Chen等人为通信延迟由马尔可夫过程建模的NCS设计了控制器[139]。在[139]中,将得到的闭环系统转化为马尔可夫跳变线性系统后,可以很容易地计算控制器。值得注意的是,在上述的著作和更多的著作中(见例[63,140,141]),只有最新的/最近的状态信息将被用来决定控制效果。直观地说,在计算控制信号时,历史数据背后的信息被浪费了。此外,随着快速发展的压缩感知理论[142,143],压缩传感器可以在较小的网络带宽下将系统状态的历史数据传输给控制器。因此,在本章中,基于充分利用历史状态信息的动机,新型保代价状态反馈控制器不仅依赖于最新的状态信息,而且依赖于控制器节点上的历史数据。
With the spatially distributed sensors, the connection between the sensor and the controller would be multi-channel links. In this chapter, we consider the NCSs in which each individual sensor measures one state information and transmits the measurement to the controller via separate communication channels. In [136], the data packet dropout and disorder problems for multi-channel NCS were studied where the guaranteed cost controller can be proposed by solving a set of linear matrix inequal- ities (LMIs). Chen et al. designed controller for the NCS where the communication delays were modeled by Markov processes [139]. In [139], after transforming the resulting closed-loop system into a Markov jump linear system, the controller can be readily computed. It is noticed that in the aforementioned works and more (see e.g. [63, 140, 141]), only the most updated/recent state information will be used to determine the control effort. Intuitively, the information behind the historical data is wasted when computing the control signal. In addition, with the fast developed compressive sensing theory [142, 143], the compressive sensor can transmit a substan- tial length of historical data of the system state to the controller with small network bandwidth. Therefore, in this chapter, motivated by making the most of the historical state information, the novel guaranteed cost state feedback controller will not only depend on the most updated state information, but also the historical data at the controller node.
本章其余部分的组织如下。在5.2节中,我们介绍了网络控制系统的结构和传感器的调度方案。同时,成本函数是沿着设计目标给出的。在第5.3节中,给出了控制器的设计过程,并给出了具有非凸约束的等价LMI条件。数值模拟和结语分别在5.4节和5.5节中给出。
The rest of the chapter is organized as follows. In Section 5.2, we present the structure of the NCS and the sensor scheduling scheme. Also, the cost function is given along the design objectives. In Section 5.3, the controller design procedure is provided and the equivalent LMI conditions with nonconvex constraints are devel- oped. The numerical simulation and concluding remarks are given in Sections 5.4 and 5.5, respectively.
5.2 问题描述
考虑图5.1中具有多个状态延迟的离散时间设备。
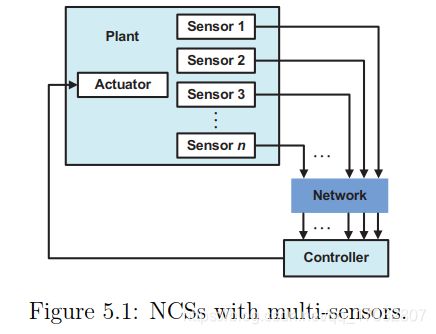
离散时间状态空间模型是:
 (5.1)
(5.1)
其中,![x(k) = [x_1(k),x_2(k),...,x_n(k)]^T \in \mathbb{R}^n](http://img.e-com-net.com/image/info8/7315479b4b5e48c1b482ec741af9eb28.gif) 是状态向量,并且
是状态向量,并且![]() 是控制输入。
是控制输入。 都是维度合适的系统矩阵,
都是维度合适的系统矩阵, 是时滞状态的个数。在图5.1中,设备中的n个传感器通过通信网络与控制器连接。传感器i测量系统状态变量
是时滞状态的个数。在图5.1中,设备中的n个传感器通过通信网络与控制器连接。传感器i测量系统状态变量 。测量结果通过传感器-控制器链路传输给控制器。在这样的NCS中,一个组件(控制器/传感器)一次只能从一个通道传输或接收数据[144]。因此,控制器在每个时间步长k接收到一种状态的测量。在本章中,我们假设控制信号可以立即到达执行器。
。测量结果通过传感器-控制器链路传输给控制器。在这样的NCS中,一个组件(控制器/传感器)一次只能从一个通道传输或接收数据[144]。因此,控制器在每个时间步长k接收到一种状态的测量。在本章中,我们假设控制信号可以立即到达执行器。
为了简化描述,我们为传感器调度方案定义一个指标函数![]() 。
。![]() 在一个有限集合
在一个有限集合 。所以在时刻k,
。所以在时刻k,![]() 表示控制器接收来自传感器i的测量信息。对于当前NCS中使用的传感器,在传感器上安装一个缓冲区,记录长度为m的历史数据进行测量。数据被打包成一个包,并在网络可用时传输到控制器[145]。值得注意的是,一些网络协议在一个包中有最大的数据长度[146]。在这种情况下,当传感器测量是稀疏或缓慢时变时,可以采用压缩传感器来减小数据量,进一步减小网络传输负荷[147]。我们采用以下传感器调度方案:当
表示控制器接收来自传感器i的测量信息。对于当前NCS中使用的传感器,在传感器上安装一个缓冲区,记录长度为m的历史数据进行测量。数据被打包成一个包,并在网络可用时传输到控制器[145]。值得注意的是,一些网络协议在一个包中有最大的数据长度[146]。在这种情况下,当传感器测量是稀疏或缓慢时变时,可以采用压缩传感器来减小数据量,进一步减小网络传输负荷[147]。我们采用以下传感器调度方案:当![]()
![]() (5.2)
(5.2)
在(5.2)中提出的调度方案中,n个传感器以同等优先级的方式逐个发送工厂的测量值,这种方式是固定的,而不是随机的。
与(5.1)相关联,我们定义了以下成本函数,
 (5.3)
(5.3)
这里,对称正定矩阵![]() 是权重因子。通过选择不同的权重因子,可以达到不同的系统性能水平。
是权重因子。通过选择不同的权重因子,可以达到不同的系统性能水平。
由于控制器在每个时间步长都从传感器接收到一个数据包,所以所设计的控制器将依赖于指示器函数![]() 。本章的目标是设计如下形式的依赖于传感器的保成本状态反馈控制器:
。本章的目标是设计如下形式的依赖于传感器的保成本状态反馈控制器:
 (5.4)
(5.4)
这里,令![]() 。从5.4中可以看到控制信号是当前信号
。从5.4中可以看到控制信号是当前信号![]() 到历史信号
到历史信号![]() 的线性组合。根据当前更新的传感器,即
的线性组合。根据当前更新的传感器,即![]() ,实现一组特定的控制增益来产生控制信号。
,实现一组特定的控制增益来产生控制信号。
利用所提出的状态反馈控制器对控制系统进行闭环控制,经过一些操作后,闭环系统就变成了闭环系统,
 (5.5)
(5.5)
其中,![]() 被定义如下,
被定义如下,
 (5.6)
(5.6)
 被定义如下,
被定义如下,
![]() (5.7)
(5.7)
备注5.1
状态反馈控制增益 中的参数不能自由设计;事实上,它的设计应该有限制条件。
中的参数不能自由设计;事实上,它的设计应该有限制条件。

取图5.2作为一个例子,其中![]() (接收测量信息初始为3,4个传感器,3个历史长度),在时刻t上,控制器
(接收测量信息初始为3,4个传感器,3个历史长度),在时刻t上,控制器![]() 取决于阴影部分的信息。所以控制器应该遵循所谓的零元素约束:
取决于阴影部分的信息。所以控制器应该遵循所谓的零元素约束:
(5.8)
在这里,∗表示要设计的未知控制参数。0表示结点对应的状态信息对k处的控制器不可用。控制器的零元素约束 来自两个原因:因为传感器测量相应的状态变量没有计划使用网络(例如,在
来自两个原因:因为传感器测量相应的状态变量没有计划使用网络(例如,在![]() 、
、 和
和![]() 中的0),或因为数据长度(历史)的状态变量传感器缓冲区不够长(例如,在
中的0),或因为数据长度(历史)的状态变量传感器缓冲区不够长(例如,在 、
、![]() 和
和![]() 中的0)。值得一提的是,控制器可以访问
中的0)。值得一提的是,控制器可以访问![]() 、
、 和
和![]() ,因为它们都包含在前面的数据包中,即分别来自k-5处的传感器2的数据和k-4处的传感器3的数据。
,因为它们都包含在前面的数据包中,即分别来自k-5处的传感器2的数据和k-4处的传感器3的数据。
备注5.2
通过对传感器依赖的控制器![]() 设置额外的约束,可以在传感器到控制器的链路中加入恒定的网络诱导延迟。例如,通过设置
设置额外的约束,可以在传感器到控制器的链路中加入恒定的网络诱导延迟。例如,通过设置 ,当传感器到控制器的延迟为1时,(5.4)中的控制器u(k)等价于静态反馈控制器,其中x(k)对控制器不可用。这样,通过在控制器上附加约束结构,得到了具有恒定传感器-控制器延迟的网络控制系统的保成本状态反馈控制器,这是本章的一个特例。
,当传感器到控制器的延迟为1时,(5.4)中的控制器u(k)等价于静态反馈控制器,其中x(k)对控制器不可用。这样,通过在控制器上附加约束结构,得到了具有恒定传感器-控制器延迟的网络控制系统的保成本状态反馈控制器,这是本章的一个特例。
主要结论
本章的目标是设计保证代价状态反馈控制器,使(5.5)中的闭环系统是稳定的,(5.3)中的代价函数J有一个有限常数值的上界。在这一节中,我们将设计问题表述为一组带有非凸约束的LMI。
定理5.1
对于具有多状态时滞的离散网络控制系统,在存在适当维数的正定矩阵 和
和![]() ,使得
,使得
![]() (5.9)
(5.9)
对所有![]() ,受非凸约束
,受非凸约束![]() ,其中
,其中
![]() ,
,
 。
。
(5.4)中的控制器u(k)使网络控制系统稳定,从而使(5.3)中的系统性能得到满足。
证明
对于(5.5)中的闭环网络系统,选择如下的李亚普诺夫函数,
 。
。
(5.5)中Lyapunov函数的差分求解是,
将(5.5)中的![]() 代入上一个方程,有
代入上一个方程,有
其中,
 ,
,
 ,
,
根据李雅普诺夫理论,如果对于所有的 其
其 ;则(5.5)中的闭环系统是稳定的。使用舒尔补定理,如果下式成立
;则(5.5)中的闭环系统是稳定的。使用舒尔补定理,如果下式成立
![]() (5.10)
(5.10)
则
![\Delta V(x(k)) = \eta ^T(k) \left [ \bar{A}_{c}^{T}(\mathbb{I}(k))P \bar{A}_{c}(\mathbb{I}(k)) -\Omega(k) \right ]\eta(k) <0](http://img.e-com-net.com/image/info8/bf658ab8e380470ea0a70759ebea79b9.gif) (5.11)
(5.11)
因为 ![]() ,可以定义
,可以定义 ,然后闭环系统是稳定的如果对于所有的
,然后闭环系统是稳定的如果对于所有的![]() 以下LMI成立
以下LMI成立
 (5.12)
(5.12)
其约束于![]() 。
。
下面,我们将证明(5.3)中的代价函数是一个有限常数的上界。考虑李雅普诺夫函数,如果下面的不等式成立
![]() (5.13)
(5.13)
对于所有![]() ,并且
,并且
![]() ,
,
并且再考虑(5.11),可以得到

上一个不等式等价为
![]() (5.14)
(5.14)
对于![]() ,两边叠加式子(5.14),得到
,两边叠加式子(5.14),得到
 (5.15)
(5.15)
右边是一个正常数。从而保证了系统的性能。证明到此结束。
定理5.1中的条件是一组带有非凸约束的线性矩阵不等式。利用发展的锥补线性化(CCL)算法,这是一种迭代LMI方法,可以很容易地计算控制器(详见[55,148]和[149])。
备注5.3
与传统的状态反馈控制器在系统演化时实现静态反馈增益K不同,本章提出的反馈控制增益依赖于指标函数![]() 。闭环NCS本质上是一个切换系统,其中
。闭环NCS本质上是一个切换系统,其中![]() 的转移概率为,
的转移概率为,
这里,![]() 意味着
意味着![]() 。
。![]() 地意思也是一样的。当切换路径固定时,闭环系统是确定性切换系统。因此,李雅普诺夫函数应该对系统演进中的每一个可能路径进行测试。所以定理5.1中的线性矩阵不等式需要求解所有
地意思也是一样的。当切换路径固定时,闭环系统是确定性切换系统。因此,李雅普诺夫函数应该对系统演进中的每一个可能路径进行测试。所以定理5.1中的线性矩阵不等式需要求解所有![]() 。
。
5.4 数值实验
考虑一个网络系统,系统参数如下
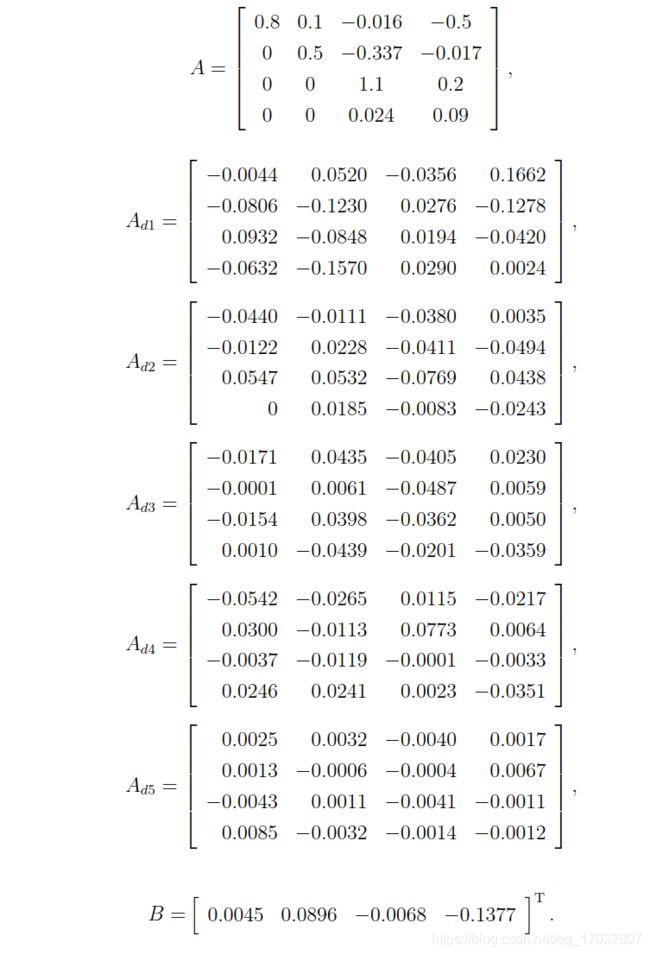
状态向量![]() 的维数为
的维数为 ,控制输入向量
,控制输入向量![]() 的维数为
的维数为 。每个状态变量的历史数据长度为
。每个状态变量的历史数据长度为![]() 。我们选择代价函数
。我们选择代价函数 中的加权矩阵一项为
中的加权矩阵一项为 。要设计的传感器相关控制器有
。要设计的传感器相关控制器有![]() 矩阵
矩阵
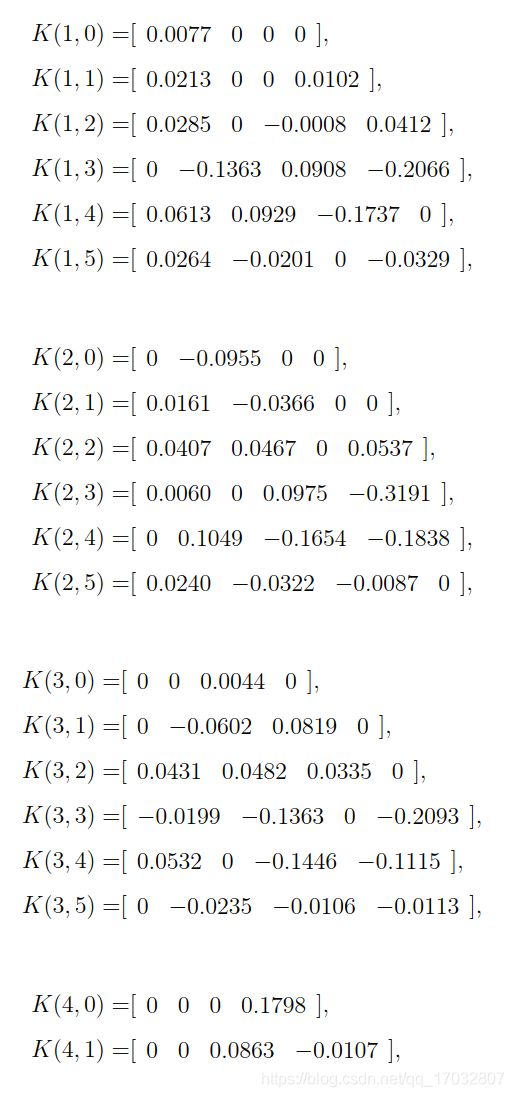
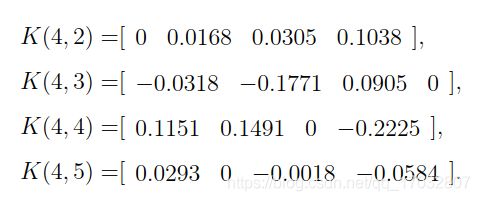
(5.16)
作为比较,还设计了一种不考虑历史数据的传感器依赖控制器:

仿真的初始值为
图5.3和图5.4分别用(5.17)中的控制器和所提出的控制器演示了![]() 的轨迹。从图中可以看出,这两个控制器都能稳定网络中的设备。与使用(5.17)中的控制器相比,所提出的控制器产生了更平滑的响应,特别是对于
的轨迹。从图中可以看出,这两个控制器都能稳定网络中的设备。与使用(5.17)中的控制器相比,所提出的控制器产生了更平滑的响应,特别是对于![]() 和
和![]() 。然而,所提出的控制器具有较大的稳定时间。可能是使用历史数据导致系统响应延迟。
。然而,所提出的控制器具有较大的稳定时间。可能是使用历史数据导致系统响应延迟。
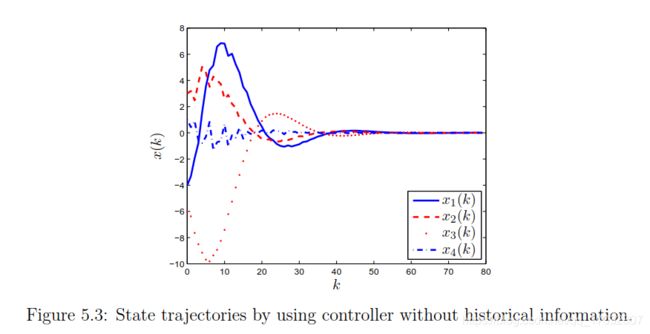
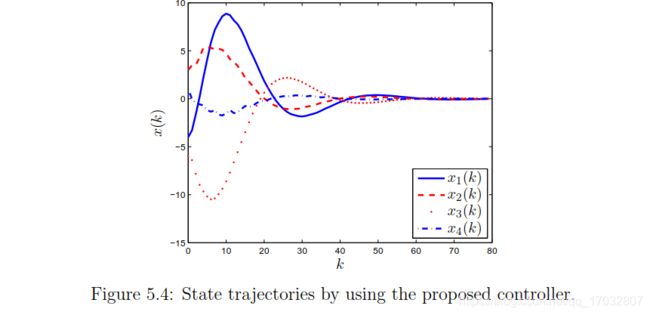
由数值结果可知,式(5.15)中的代价函数和上限![]() 为
为

这就意味着满足了条件![]() ,并且目标控制器也对NCS有效。
,并且目标控制器也对NCS有效。
5.5 结论
在这一章中,针对具有多状态时滞的离散网络控制系统,提出了保证代价状态反馈控制器。本章考虑的NCS从传感器到控制器有多个通道,传感器通过这些通道将状态测量传输到控制器。所提出的控制器将历史数据纳入控制器设计中,而不仅仅考虑最新的状态信息。仿真实例表明,该控制器的性能优于传统控制技术。
然而,有些问题值得进一步研究。首先,分布式传感器不可避免的测量噪声或压缩传感器的重构误差会对控制性能产生负面影响。其次,如果控制信号u被纳入成本函数,例如:
![J = \sum_{k=0}^{\infty }\left [ x^T(k) \Xi x(k) +u^T(k) \Xi_u u(k) \right ]](http://img.e-com-net.com/image/info8/8e793c9ff97248eca1e4fe954ccc3a22.gif) (5.18)
(5.18)
其中![]() 为控制动作的加权因子,则可以调节控制力度以避免潜在的致动器饱和。最后,如果传感器调度方案不是确定性的,而是随机的,那么所设计的控制器应该能够保证系统是随机稳定的。
为控制动作的加权因子,则可以调节控制力度以避免潜在的致动器饱和。最后,如果传感器调度方案不是确定性的,而是随机的,那么所设计的控制器应该能够保证系统是随机稳定的。
6. 网络控制系统设计:一个触觉的例子
6.1 简介
触觉系统允许人类操作者通过电动触觉设备与虚拟环境的动力学进行触觉交互[150,151]。将触觉设备连接到虚拟环境,虚拟耦合器试图让触觉动态模拟虚拟环境的动态。在保持系统稳定性的同时,将虚拟环境的动态准确地呈现给人类操作者是具有挑战性的[152]。稳定性和透明度都是给操作者虚拟存在感的关键[153]。虽然稳定和透明度应该同时得到满足,但它们通常是相互竞争的目标[154]。一方面,系统应该是稳定的。与传统的机器人操作机不同的是,触觉装置是与操作者交互连接的;因此,设备的任何意外或不稳定的行为都可能导致机械手摆动或人员受伤。即使是很小的震荡也会损害使用者的真实感。另一方面,透明度需要确保表面属性的真实感,如刚度。透明度量化了虚拟对象属性呈现给用户的保真度[155]。例如,虚拟环境中的虚拟墙不应该感觉像具有明显变形的材料。相反,虚拟环境中的软组织也不应该像墙一样被触摸[156]。
A haptic system allows the human operator to interact kinesthetically with the dy- namics of a virtual environment through a motorized haptic device [150, 151]. Con- necting the haptic device to the virtual environment, the virtual coupler seeks to let the haptic dynamics mimic the dynamics of the virtual environment. It is challenging to accurately render the dynamics of the virtual environment to the human opera- tor, while simultaneously maintaining the system stability [152]. Both stability and transparency are essential for giving operators the sense of the virtual presence [153]. Although stability and transparency should be satisfied simultaneously, they are gen- erally competing objectives [154]. On one hand, the system should be stable. Different from the traditional robot manipulators, the haptic device is interactively connected with an operator; therefore, any unexpected/unstable behavior of the device may cause oscillation of the manipulator or injuries of the human operator. Even minor oscillation can impair the realism to the user. On the other hand, transparency is required to ensure a realistic feeling of the surface properties such as the stiffness. Transparency quantifies the fidelity with which the virtual object properties are p- resented to the user [155]. For example, a virtual wall in the virtual environment should not be felt like materials with apparent deformation. On the contrary, a soft tissue in the virtual environment should not be touched like a wall either [156].
一个有意义的透明度测量只有在包括虚拟环境、设备和操作者在内的所有触觉动态交互产生一个稳定的系统时才会存在[155]。有几个作者研究过触觉学中的稳定性问题,其中,Minsky等人[157]首先通过将采样和保持效应近似于延迟连续时间模型来研究它。这个早期的研究和随后的几项工作都假定了人类操作者的一个特定模型。然而,人体的时变特性对稳定触觉系统的设计提出了挑战。然后,通过观测器和控制器的分离设计,提出了时域无源控制方法,以保证触觉系统的稳定性。Miller等人[158]试图通过建立触觉组件(触觉设备、虚拟耦合器和虚拟环境)的无源性来避免对人体动力学的显式建模。[159]利用无源性理论提出了虚拟耦合器的概念。[160]将设计问题转化为H无穷优化问题,提出了保证稳定性和透明性的一维交互虚拟耦合器。
A meaningful transparency measurement will only exist unless all haptic dynamics, including the virtual environment, the device, and the human operator interact to produce a stable system [155]. The stability issue in haptics has been studied by several authors, among which, Minsky et al. [157] firstly investigated it by approxi- mating the sampling and hold effects to a delayed continuous-time model. This early study and several following work assumed a particular model of the human operator. However, the time-varying nature of the human body poses a challenge for the de- sign of stable haptic systems. Later, the time domain passivity control approach was developed by designing the observer and controller separately to guarantee a stable haptic system. Miller et al. [158] attempted to avoid explicit modeling of human dynamics by establishing the passivity of the haptic components: The haptic device, the virtual coupler, and the virtual environment. Using the passivity theory, the con- cept of virtual coupler was proposed in [159]. The virtual coupler for one-dimensional interaction guaranteeing the stability and transparency was proposed by converting the design problem into an H optimization problem in [160].
在传统的触觉系统中,控制计算机和设备是直接相连的。然而,随着NCS的快速发展[161,162],在控制系统中采用无线通信链路是一个很大的趋势;参见[163,164,165]。无线触觉系统在[166]中也有报道,其中一个无线控制器被用来控制人形机器人的方向和速度。在[167]中,虚拟环境与触觉设备通过无线通信链路连接。位置、速度和控制信号的测量通过无线信道传输。无线触觉系统在很多方面都有很大的应用潜力,例如,遥控机器人可以在有线机器人无法到达的地方操作,例如在核电站内。然而,网络引入的时间延迟会降低远程操作设备的性能[168]。在[168]中,建议根据人类操作者施加的力来改变从环境中反射出来的力。为了实现具有时滞的遥控触觉系统的稳定性,已经报道了几种不同的方法。请参阅【169】及其相关文献。
In traditional haptic systems, the control computer and the device are directly interconnected. However, with the fast development of the NCS [161, 162], there is a great trend to employ the wireless communication links in the control system; see, e.g., [163, 164, 165]. The wireless haptic systems have also been reported in [166], where a wireless controller is implemented to control the direction and the speed of a humanoid robot. In [167], the virtual environment and the haptic device are connected through wireless communication links. The measurement of the position, the velocity and the control signal are transmitted through wireless channels. The wireless haptic system has a great potential in many applications, for example, the remotely controlled robot can operate in locations where wired ones cannot reach, e.g., inside a nuclear power plant. However, the time delays introduced by the network can degrade the performance of the tele-operated devices [168]. In [168], it is suggested to alter the force reflected from the environment depending on the force applied by the human operator. In order to achieve stability of a tele-operated haptic system with time delays, several different approaches have been reported. Please refer to [169] and references therein.
在虚拟环境中,多材料零件作为增加应用和增加功能能力的手段越来越多地应用于制造中[170]。在[170]中,针对系统的触觉渲染,其中提出了多个虚拟材料。这种多材料的虚拟环境称为混合虚拟环境。在混合虚拟环境中,虚拟物理属性因地而异。在混合虚拟环境中,刚度和阻尼并不是恒定的。在虚拟环境中,通过触觉设备跟随操作者移动的数字对象通常被称为avatar[171]。因为操作者的移动通常是不可预测的,所以虚拟角色和虚拟环境之间的虚拟空间中的接触位置也是不可预测的。换句话说,接触位置的变化固有地表现出一种随机模式。为了设计虚拟耦合器,可以利用随机过程作为数学工具来表征虚拟角色的运动轨迹。我们假设操作者的动作是独立于过去的。因此,由于马尔可夫过程的无记忆性,它适合于模拟虚拟角色的轨迹。到目前为止,对于混合虚拟环境,特别是网络环境下的虚拟耦合器设计研究较少,这也是本章研究的主要动机。本章的主要贡献有三方面:
In the virtual environment, multi-material parts have been increasingly employed in manufacturing as means for increasing the application as well as adding the func- tional capability [170]. In [170], the haptic rendering for the system where multiple virtual materials was presented. This multi-material virtual environment is called a mixed virtual environment. In mixed virtual environments, the virtual physical property varies from place to place. Stiffness and damping are not constant through- out the mixed virtual environment. The digital object in the virtual environment which follows the operator movement through the haptic device is generally termed avatar [171]. Because the movement of the operator is generally not predictable, so the contact position in the virtual space between the avatar and the virtual environ- ment is not predictable either. In other words, the change of the contact position inherently exhibits a stochastic pattern. In order to design the virtual coupler, the stochastic process as a mathematical tool can be used to characterize the trajectory of the avatar. We assume the movement of the human operator is independent of the past. Therefore, the Markov process is suitable for modeling the trajectory of the avatar due to its memoryless property. Until now, little research attention has been paid to the virtual coupler design for the mixed virtual environment, especially in a network environment, which is the main motivation of this chapter. The main contributions of the chapter are three-fold
1)为了更好地表征虚拟角色在多材料虚拟环境中的运动特性,将虚拟角色的运动模型化为随机过程。
2)建立了考虑网络诱导时延的网络触觉系统的随机稳定性条件。
3)将虚拟耦合器的设计问题转化为表征透明要求的模型匹配问题,设计了网络化触觉系统虚拟耦合器。
1)The movement of the avatar in the multi-material virtual environment is mod- eled by a stochastic process to better characterize its practical feature.
2)The stochastic stability condition is established for the networked haptic system considering the network-induced delay.
3) By converting the design problem into a model matching problem to characterize the transparency requirement, the virtual coupler is designed for the networked haptic system.
本章其余部分的组织如下。第6.2节介绍了触觉设备的系统识别,并构建了虚拟环境的随机模型。虚拟耦合器的设计过程将在第6.3节和第6.4节中讨论,其中稳定性和透明度问题将分别讨论。最后,在第6.5节和第6.6节分别给出了仿真和实验结果及结论。
The remainder of this chapter is organized as follows. Section 6.2 presents the system identification of the haptic device and constructs the stochastic model of the virtual environment. The virtual coupler design procedure is discussed in Sections 6.3 and 6.4 in which the stability and transparency issues are discussed, respectively. Finally, the simulation and experimental results and concluding remarks are given in Sections 6.5 and 6.6, respectively.
6.2 系统辨识和随机模型
为了设计虚拟耦合器,首先需要获得触觉装置和虚拟环境的数学描述[172]。在本节中,首先识别触觉装置的动力学,然后应用随机过程来模拟虚拟角色在虚拟墙上的运动。
6.2.1 系统辨识
由于触觉装置的动力学模型与设计过程密切相关,因此确定一个准确的动力学模型是非常重要的。对于本章所使用的系统,输入是电机施加的扭矩,而输出是触觉设备角位移/位置的编码器测量。本章使用的Phantom全触觉系统是一个三自由度的非线性装置,三个自由度来自于装置的三个关节。每个关节提供一个转动自由度。本章考虑的虚拟墙在y-z平面内,如图6.1所示。因此,一维穿透壁面仅依赖于一个关节,这使得器件绕z轴旋转。考虑到其他两个关节的位置,转动惯量与构型有关。考虑到其他两个关节的位置,转动惯量与构型有关。在这里,我们推导了当 时的名义器件传递函数。
时的名义器件传递函数。
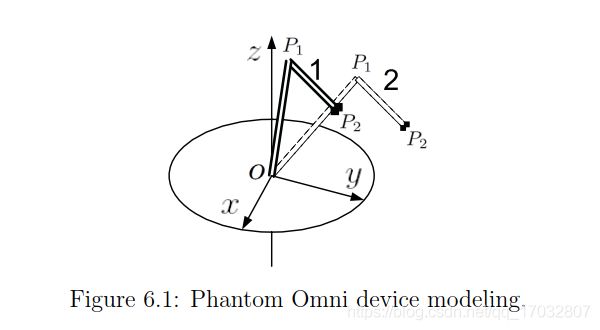
应用牛顿第二定律,得到从力矩(N·m)到角位置(rad)的连续时间传递函数为
 (6.1)
(6.1)
其中m是棒子的质量,b是杆的轴向阻尼。当一个极点在原点时,系统本身是不稳定的,即积分器使系统有界输入有界输出(BIBO)不稳定。输入-输出系统辨识技术不能直接应用于这种不稳定装置。因此,采用比例控制器进行闭环识别实验,输入信号为频率为0.4545 Hz,幅值为0.02 V的方波。采用最小二乘辨识方法,辨识出的触觉装置参数分别为 m = 0.7943kg 和 b = 1.9857 N·s/m。所以确定的传递函数是
![]() (6.2)
(6.2)
6.2.2 随机模型
本章考虑的混合虚拟墙由几种材料组成。如图6.2所示。混合虚拟墙由三种不同的材料组成,1、2和3,具有不同的物理性能。avatar会以一维穿透的方式接触墙壁。由于人的运动是不可预测的,有时甚至是随机的,所以用概率特性来表征随机行为是非常合理的。
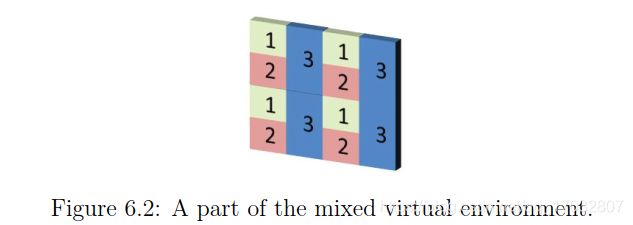
avatar和虚拟墙壁之间的接触点从一种材料切换到另一种材料。随机切换过程可以被建模为马尔可夫过程 ,例如,当化身与墙上的材料接触时马尔可夫过程处于模式中。这里,N是材料的数量。马尔可夫过程的演化可以用跃迁概率
,例如,当化身与墙上的材料接触时马尔可夫过程处于模式中。这里,N是材料的数量。马尔可夫过程的演化可以用跃迁概率 来描述,其中
来描述,其中 为avatar的滑动速度。还有,用
为avatar的滑动速度。还有,用 表示材料i和材料j之间的边界长度。可以得到,
表示材料i和材料j之间的边界长度。可以得到,
 (6.3)
(6.3)
越大,avatar 从模式i移动到模式j的概率就越大。 是随时间变化的滑动速度,由此得到的马尔可夫过程是非齐次的,难以求解。为了简化这个问题定义,假设 avatar以恒定的速度滑动(如果与虚拟墙壁接触),即是常数,则
是随时间变化的滑动速度,由此得到的马尔可夫过程是非齐次的,难以求解。为了简化这个问题定义,假设 avatar以恒定的速度滑动(如果与虚拟墙壁接触),即是常数,则 。事实上,恒速横移可以广泛应用于工业应用,如激光加工过程[173]、磨料加工过程[174]、搅拌摩擦过程[175]。给出了离散时间马尔可夫过程
。事实上,恒速横移可以广泛应用于工业应用,如激光加工过程[173]、磨料加工过程[174]、搅拌摩擦过程[175]。给出了离散时间马尔可夫过程![]() 的转移矩阵
的转移矩阵 :
:
![\Lambda = \left [ \lambda _{ij} \right ] \in \mathbb{R}^{N \times N} , \lambda_{ii} = 1- \sum_{j=1,j\neq i}^{N} \lambda_{ij}](http://img.e-com-net.com/image/info8/c42dac92d6e94a3b8d407003ab175fa4.gif)
这里,是一个常数矩阵并且给出齐次马尔可夫过程的转移概率:

利用所确定的系统传递函数和随机切换模型,为混合虚拟壁的虚拟耦合器设计奠定了基础。关于斑块模式和转移率,我们有以下备注。
备注6.1
虚拟墙上的斑块以重复的模式对齐。在这种模式中,所有相同材料的斑块都具有相同的形状和相同的相邻斑块。因此,跃迁率 在一个斑块i上可以应用到整个虚拟墙上的所有带有i材料的斑块上。
备注6.2
注意,avatar 不能在任意两个补丁之间任意跳转。例如,材料i不相邻材料j,即![]() ,那么 avatar 就不能从i移动到j,也不能从j移动到i。在这种情况下,一些对称元素的过渡矩阵是0(
,那么 avatar 就不能从i移动到j,也不能从j移动到i。在这种情况下,一些对称元素的过渡矩阵是0(![]() ),然而仍然是一个有效的转移矩阵。本章的设计过程允许内存在0元素。
),然而仍然是一个有效的转移矩阵。本章的设计过程允许内存在0元素。
6.3 稳定性分析
在本节中,在分析触觉系统的稳定性之前,首先讨论触觉控制器的作用。对于图6.3所示的触觉系统,在设备的机械手上有两个力矩。
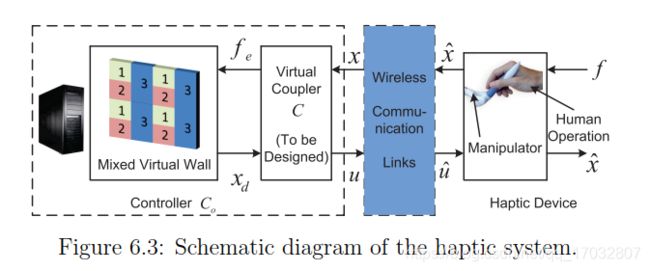
通过无线通信信道,设备中的电机以扭矩 驱动机械手。从控制器到电机的扭矩在通信链路上传输时会延时,记为
驱动机械手。从控制器到电机的扭矩在通信链路上传输时会延时,记为 。同样,触觉位置
。同样,触觉位置 也会在通过通信链路时被延迟,延迟位置记为
也会在通过通信链路时被延迟,延迟位置记为 ,力矩记为
,力矩记为![]() 。本章所考虑的时间延迟假设为常数值。事实上,恒定延迟可以用来为某些通信协议的某些类型的网络建模。虚拟耦合器和虚拟环境可以作为
。本章所考虑的时间延迟假设为常数值。事实上,恒定延迟可以用来为某些通信协议的某些类型的网络建模。虚拟耦合器和虚拟环境可以作为![]() 集合在一起。同时,操作者在机械手上施加力矩
集合在一起。同时,操作者在机械手上施加力矩 。(除非另有说明[152],所有变量都是拉普拉斯变量s的函数。)利用(6.2)中确定的传递函数
。(除非另有说明[152],所有变量都是拉普拉斯变量s的函数。)利用(6.2)中确定的传递函数 ,给出了机械手的位置:
,给出了机械手的位置:
 (6.4)
(6.4)
其中控制动作是
![]() (6.5)
(6.5)
从人工操作员的角度来看,如果没有通信延迟,则从到的闭环系统为:
![]() (6.6)
(6.6)
在触觉渲染中,目标是塑造设备位置对人工操作员输入的闭环响应。期望的位置响应用![]() 表示。因此,通过最小化实际位置响应和期望位置响应之间的误差来实现透明的环境动力学,例如,
表示。因此,通过最小化实际位置响应和期望位置响应之间的误差来实现透明的环境动力学,例如, ,当误差是0时,达到了完美的触觉渲染效果。
,当误差是0时,达到了完美的触觉渲染效果。
把问题重新配置成下面的最小化问题:
 (6.7)
(6.7)
这将在第6.4节中介绍。
由于复杂的虚拟环境可以分解为小的平面块,我们关注虚拟墙问题,其中虚拟环境被建模为线性弹簧-阻尼系统[159]。当混合的虚拟墙被穿透时,人应该会感受到一种反作用力,相当于
![]() (6.8)
(6.8)
其中, 是材料i的刚度和阻尼。事实上,墙体只能被压缩,所以负号表示力的方向与位移和速度相反。
是材料i的刚度和阻尼。事实上,墙体只能被压缩,所以负号表示力的方向与位移和速度相反。
![]() 给出了触觉系统中虚拟壁相互作用的一个充分稳定条件[176]。该条件表明,对于没有虚拟耦合器的触觉系统,当阻尼系数
给出了触觉系统中虚拟壁相互作用的一个充分稳定条件[176]。该条件表明,对于没有虚拟耦合器的触觉系统,当阻尼系数 较大、刚度
较大、刚度 较大或采样周期较大时,其稳定性无法得到保证。这就引出了引入虚拟耦合器块的想法
较大或采样周期较大时,其稳定性无法得到保证。这就引出了引入虚拟耦合器块的想法![]() ,其中,
,其中, 会被使用当 avatar 与材质i交互时。因此
会被使用当 avatar 与材质i交互时。因此![]() 是一个切换型虚拟耦合器。虚拟耦合器具有更大的采样周期和更灵活的和选择,给系统设计带来了额外的自由度。
是一个切换型虚拟耦合器。虚拟耦合器具有更大的采样周期和更灵活的和选择,给系统设计带来了额外的自由度。
定理6.1
如果人工操作者有一个被动的实理性传递函数,其为
![]() (6.9)
(6.9)
其中DPR为所有离散正实传递函数的集合,则图6.4中的触觉系统是无振荡的。
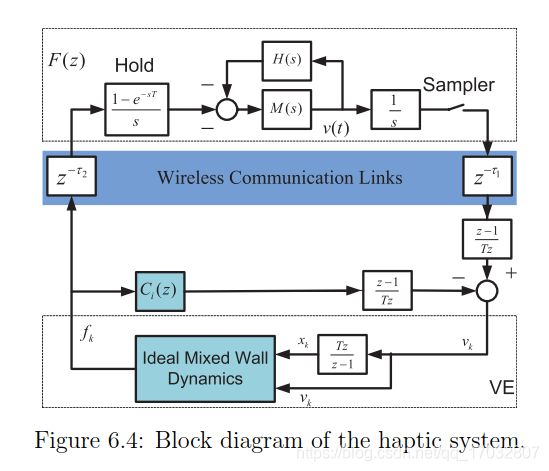
这一结果的证明受到[177]的启发,其中提出了一个确定性的情况。
证明
表示输入为 输出为
输出为 的图6.4中
的图6.4中 和
和![]() 的网络化并联为
的网络化并联为![]() ,当avatar 接触材料i时,
,当avatar 接触材料i时,
![]()
其中,

这里, 表示人为操作,为正实有理传递函数。可以证明[177]
表示人为操作,为正实有理传递函数。可以证明[177]
![]() (6.10)
(6.10)
如果我们选择使(6.9)成立,那么![]() 的总和就是DPR。
的总和就是DPR。
为了说明图6.4中的虚拟环境(VE)是负的,我们构造了以下存储函数
 (6.11)
(6.11)
 和外力为
和外力为
![]() ,
,![]() ,
,
其中, 是操作手的速度。能量意义上的负定要求系统的输入能量不应小于存储函数的增量。换句话说,
是操作手的速度。能量意义上的负定要求系统的输入能量不应小于存储函数的增量。换句话说, 不应少于
不应少于![]() 。那么,在任意时间区间内,从步骤k到k + p (p是任意正整数),下面不等式成立[160]
。那么,在任意时间区间内,从步骤k到k + p (p是任意正整数),下面不等式成立[160]

通过计算![]() 在不同情况下,可以看出
在不同情况下,可以看出![]() ,因此系统是无振荡的。
,因此系统是无振荡的。
备注6.3
在无源性理论的基础上建立了触觉系统的随机稳定性。通过证明虚拟耦合器、触觉装置和人体操作者之间的连接系统是被动的,以及虚拟环境是被动的,实现了闭环系统的稳定性。与[177]不同的是,本章考虑了闭环系统的时滞和随机切换问题。
在本节中,导出了触觉系统的稳定性条件。在下一节中,虚拟耦合器将被设计成最大限度地提高网络触觉系统的透明度。
6.4透明虚拟耦合器设计
触觉系统的导纳是从位置到电机施加扭矩的传递函数。为了便于推导,我们假设avatar与虚拟环境是有联系的,那么系统的行为就像一个切换系统。对于图6.4所示的触觉系统,理想导纳为
![]()
因为这将是(6.8)中没有传递延迟的弹簧——阻尼虚拟墙模型的离散时间等价。然而,从人类操作者的观点来看,由于虚拟耦合器和传输延迟,实际产生的导纳
![]()
理想导纳和最终导纳![]() 之间的区别称为触觉失真。(6.7)中的最小化问题等价于最小化触觉失真。通常,人工操作者对特定的频率范围更敏感,因此他们对保持透明度更感兴趣。在触觉渲染中,如何确定感兴趣的频率,更是一个生理学、心理物理学、甚至神经学的问题:有兴趣的读者可以参考[178]和其中的参考文献。可以根据算子对不同频率的灵敏度来选择合适的加权函数[160]。因此引入了加权函数
之间的区别称为触觉失真。(6.7)中的最小化问题等价于最小化触觉失真。通常,人工操作者对特定的频率范围更敏感,因此他们对保持透明度更感兴趣。在触觉渲染中,如何确定感兴趣的频率,更是一个生理学、心理物理学、甚至神经学的问题:有兴趣的读者可以参考[178]和其中的参考文献。可以根据算子对不同频率的灵敏度来选择合适的加权函数[160]。因此引入了加权函数![]() ,它允许在不同频率下最大化透明度。然后将问题转化为设计虚拟耦合器
,它允许在不同频率下最大化透明度。然后将问题转化为设计虚拟耦合器![]() ,使以下透明度标准最小化:
,使以下透明度标准最小化:
![]() (6.12)
(6.12)
为了简单和便于后续计算,我们从中提取了直接前馈项,并限制了这种形式的虚拟耦合器之间的搜索

其中 是一个严格的传递函数,因此满足定理6.1。上式中剩下的项可以看作是的反馈。因此,得到闭环内传递函数
是一个严格的传递函数,因此满足定理6.1。上式中剩下的项可以看作是的反馈。因此,得到闭环内传递函数![]() 为
为
![]()
留下外部反馈。有了这两种表示法,图6.5可以重绘成图6.6。
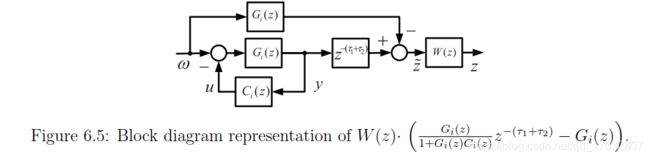

图6.6利用输入 和输出
和输出![]() 实现
实现 和
和![]() :
:
![]()
严格正确传递函数![]() 的实现为
的实现为

加权函数![]() 的实现为
的实现为
![]() (6.13)
(6.13)
将系统![]() 连接起来,闭环系统为
连接起来,闭环系统为
其中,
![]() 。 (6.14)
。 (6.14)
目标是确定![]() ,使系统
,使系统 从输入
从输入 到输出
到输出 的H无穷范数最小化。那么这个问题可以概括为
的H无穷范数最小化。那么这个问题可以概括为
![]() (6.15)
(6.15)
接下来,我们分析了触觉系统的H无穷干扰衰减性能。由[179]中的定理2可知,系统在给定扰动衰减水平γ下是随机稳定的,即
![]() (6.16)
(6.16)
如果存在矩阵![]() 并且
并且![]() 使得
使得
, (6.17)
其中,
![]()
对于 成立。这里是一个正标量,并且
成立。这里是一个正标量,并且 。
。
由于(6.17)中的耦合项,矩阵不等式不是线性形式。应用[180]和[181]的算法求解耦合矩阵不等式。定义下面的凸集![]() ,其中
,其中 。如果从集合
。如果从集合![]() 中选择一个三元
中选择一个三元![]() ,则(6.17)中的矩阵不等式变为线性矩阵不等式(LMIs)。然后对每个集合求解(6.15)中的最小化问题,并选择最小的干扰衰减水平γ作为(6.15)解的近似。这种虚拟耦合器很容易获得。
,则(6.17)中的矩阵不等式变为线性矩阵不等式(LMIs)。然后对每个集合求解(6.15)中的最小化问题,并选择最小的干扰衰减水平γ作为(6.15)解的近似。这种虚拟耦合器很容易获得。
6.5 仿真和实验结果

我们使用Phantom全触觉系统(图6.7)作为测试平台,采样周期T=0.05s。对于图6.2所示的混合虚拟壁,材料1、2、3的刚度和阻尼分别为K1=1000 N/m、B1=2 N·s/m;K2= 800N/m、B2=2 N·s/m;K3 = 800 N/m、B3 = 5 N·s/m。考虑贴片模式和(6.3),给出avatar与虚拟墙壁接触位置切换的转移矩阵
6.5.1 仿真
在实验前,对每种材料进行模拟研究。一个恒定的1N的力作用在朝向墙壁的装置上。每一种材料的穿透深度结果如图6.8所示。从图中可以看出,在虚拟耦合器存在的情况下,avatar与强接触开始时存在衰减振荡。然后末端执行器被稳定在一个恒定的深度。角色进入材料2和材料3的最终深度是相同的,这并不奇怪,因为这两种材料都具有相同的硬度。此外,三种响应的延迟是由模拟的恒定网络诱导延迟引起的。
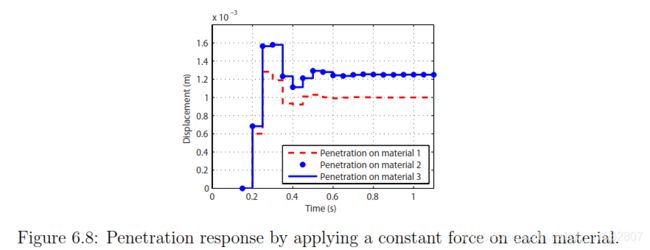
6.5.2 实验
在实验中,触觉装置跟随手臂的运动。然而,由于人类行为的随机性,施加在虚拟墙上的力不会是恒定的。模拟通信时延设为τ1 = τ2 = 3T = 0.15 s。设备的位置由安装在设备上的编码器测量并传输到虚拟环境。根据设备和虚拟墙之间的相对位置,控制计算机计算给用户的反馈力。末端执行器的轨迹是弧形的。来自虚拟环境/墙壁的反馈力由用户感知。从实验中可以看出,墙体不同部位具有不同的刚度;因此,所设计的触觉系统可以为混合虚拟墙提供良好的触觉感知。
从图6.2中可以看出,材质3的面积大于1和2,所以avatar从材质3移动到材质1或2的机会较小,因此![]() 和
和![]() 小于其他。利用所设计的虚拟耦合器,从不同视点显示虚拟角色的三维轨迹如图6.9所示,以获得更清晰的视图。从这个图中可以看出,穿透方向是x方向,avatar在y-z平面上滑动。该虚拟耦合器的x位移非常小,没有振动,因此设计的虚拟耦合器对触觉系统是有效的。模拟结果与试验结果比较表明,模拟结果与试验结果吻合较好。
小于其他。利用所设计的虚拟耦合器,从不同视点显示虚拟角色的三维轨迹如图6.9所示,以获得更清晰的视图。从这个图中可以看出,穿透方向是x方向,avatar在y-z平面上滑动。该虚拟耦合器的x位移非常小,没有振动,因此设计的虚拟耦合器对触觉系统是有效的。模拟结果与试验结果比较表明,模拟结果与试验结果吻合较好。
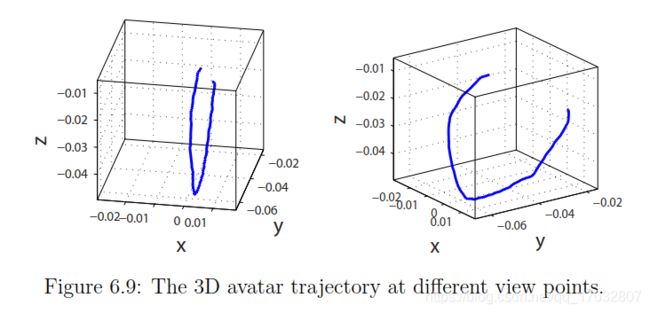

虚拟墙上不同材质之间的切换如图6.10所示。红色曲线是虚拟角色在墙上的移动轨迹,即从左向右移动。与图6.2相比,从图6.10可以得出马尔可夫模态的演化:{2,3,2,1}。
6.6 结论和未来工作
本章为网络化触觉系统设计了虚拟耦合器,虚拟环境是由多种材料组成的混合虚拟墙。触觉系统的控制器和触觉装置通过无线通信链路连接。考虑了无线连接的持续通信延迟。在仿体全触觉系统上验证了该虚拟耦合器的有效性。
在今后的工作中,我们将进一步探讨以下技术问题。首先,在本章中,使用马尔可夫过程来刻画随机行为,假设化身以恒定的速度滑动;然而,在某些应用中,速度是不同的。为了消除这个假设,我们将研究一个更一般的半马尔可夫过程。其次,所设计的虚拟耦合器依赖于触觉装置的阻尼(b)。当触觉设备在工作空间中移动时,此参数可能会更改。此外,阻尼在y和z方向上可能会发生剧烈的变化,因为设备中不同的电机将参与y或z对墙壁的穿透;例如,当墙不在y-z平面上。第三,目前的工作只考虑到常时滞。时变延迟或随机延迟的情况值得进一步研究。
7. 网络控制系统的鲁棒跟踪控制:在网络直流电机中的应用
7.1 介绍
随着数字网络技术的快速发展,将通信网络集成到控制系统设计中的趋势日益明显。这类系统被称为网络控制系统(networked control systems, NCSs)[32, 33, 141, 182, 183]。NCSs在降低成本、易于系统诊断和灵活性、单个元件的添加和替换相对简单等方面具有优势。因此,NCSs的工业应用非常广泛,从大规模的工厂自动化和工厂监控[184,185]到较小但复杂的系统,如自主移动机器人[37]。然而,有线和/或无线网络的存在也引发了几个具有挑战性的问题。这些挑战包括通信带宽的约束、网络诱导的时延、数据包丢失、抖动和异步[40,186]。众所周知,在网络控制系统的设计中必须明确考虑网络特性。
With the fast development of digital network technologies, there is a steadily increas- ing trend to integrate communication networks into the control system design. This kind of systems are called networked control systems (NCSs) [32, 33, 141, 182, 183]. NCSs have advantages in terms of cost reduction, easy system diagnosis and flexi- bility, relatively simple addition and replacement of individual elements, and so on. Hence, the industrial applications of NCSs are very wide, ranging from the large scale factory automation and plant monitoring [184, 185] to smaller yet complicated sys- tems such as autonomous mobile robots [37]. The presence of wired and/or wireless networks, however, has also induced several challenging problems. These challenges involve the constraints on communication bandwidth, network-induced time delays, packet dropouts, jitter, and asynchronization [40, 186]. It is recognized that the network characteristics must be considered explicitly in the NCS design.
在通信网络带来的挑战中,时间延迟和数据包丢失是两个主要的问题,可能会降低系统性能,甚至导致不稳定[99]。一方面,针对网络特性的遥操作任务研究了新的网络传输协议[187,188]。一些网络协议保证了网络节点之间的同步,如WorldFIP、FlexRay、Profibus-DP;其他网络协议,如Ether-net或WiFi,不能保证传感器、控制器和执行器之间的同步[189]。在本章中,我们考虑一个场景,其中系统组件通过具有时变时延的网络连接和同步[71,190]。除了标准的工业网络,如Profibus和CAN,通用网络,如以太网,由于其可负担性,简单性,广泛的使用,并连接到Internet,越来越多地应用于NCSs;参见[191]和其中的参考文献了解更多细节。另一方面,通过考虑网络特性,控制领域已经开发了关于NCSs的稳定性条件和性能分析的新方法[54,55,125]。与常时延模型和有界随机时延模型相比,随机过程模型不仅刻画了时延的随机性,而且还说明了当前时延与下次传输[46]时延之间的相关性。文献[47,55]有效地利用了伯努利过程和离散时间马尔可夫链来建模时延和丢包。得到的闭环系统被定义为马尔可夫跳变线性系统(Markovian jump linear system, MJLS)[24,48,49,50]。此外,已有文献在MJLSs框架下考虑了NCSs的稳定和控制合成。Xiao等人[47]设计了基于马尔可夫链模型的具有传感器-控制器(S-C)时滞的网络控制系统的时滞依赖状态反馈控制器,以及具有S-C和控制器-执行器(C-A)时滞的网络控制系统的时滞独立输出反馈控制器。在[50]中,作者考虑了在有损耗通信链路上的车辆控制问题,其中丢包过程建模为伯努利过程,控制器与执行器处于同一位置,这意味着在该网络控制系统中只考虑S-C丢包问题;设计了一种H无穷模态依赖输出反馈控制器。在[192]中,作者考虑了具有随机通信延迟的NCSs在系统状态和S-C链路中的稳定问题。为了同时考虑NCSs中的S-C和C-A延迟,并充分利用可用的延迟信息,Zhang和Shi等[53.55]针对马尔可夫链模型的时滞NCSs,提出了一种既依赖S-C又依赖C-A延迟信息的双模依赖控制器。是注意到状态反馈控制器在[55]的状态反馈和输出反馈控制器在[53]取决于当前S-C延迟(![]() )和以前的C-A延迟(
)和以前的C-A延迟(![]() 或
或 )。如果最新的延迟可以被纳入控制器设计的信息,需要取得更好的性能。因此,一个更有效的依赖于延迟的控制方案应该同时依赖于当前的S-C延迟和当前的C-A延迟。但是,当产生控制信号时,控制器并不知道当前的C-A延迟,因为当控制信号通过C-A链路传输时,将来会发生C-A延迟。在本章中,我们提出了一种"send all, apply one"方案来设计既依赖于当前S-C时延又依赖于当前C-A时延的时延相关控制器。
)。如果最新的延迟可以被纳入控制器设计的信息,需要取得更好的性能。因此,一个更有效的依赖于延迟的控制方案应该同时依赖于当前的S-C延迟和当前的C-A延迟。但是,当产生控制信号时,控制器并不知道当前的C-A延迟,因为当控制信号通过C-A链路传输时,将来会发生C-A延迟。在本章中,我们提出了一种"send all, apply one"方案来设计既依赖于当前S-C时延又依赖于当前C-A时延的时延相关控制器。
Among the challenges that communication networks bring, the time delays and packet dropouts are two major issues that may degrade system performance and, even worse, cause instability [99]. On the one hand, new internet transport protocols were studied for teleoperation tasks regarding network characteristics [187, 188]. Some network protocols guarantee the synchronization among network nodes, such as WorldFIP, FlexRay, and Profibus-DP; other network protocols, for instance, Ether- net or WiFi, cannot guarantee the synchronization among the sensor, the controller, and the actuator [189]. In this chapter, we consider a scenario where the system components are connected and synchronized over networks with time-varying de- lays [71, 190]. Besides standard industrial networks such as Profibus and CAN, the general-purpose networks, such as Ethernet, are increasingly applied in NCSs due to its affordability, simplicity, widespread usage, and the connectivity to Internet; see [191] and references therein for more details. On the other hand, the control com- munity has developed new methods regarding the stability conditions and the per- formance analysis for NCSs by taking network properties into account [54, 55, 125]. Compared to the constant delay model and the bounded random delay model, the stochastic process model cannot only characterize the stochastic property of the delay but also illustrate the correlation between the current time delay and the delay in next transmission [46]. The Bernoulli process and the discrete-time Markov chain were effectively employed to model time delays and packet dropouts in the litera- ture [47, 55]. The resulting closed-loop system was formulated as a Markovian jump linear system (MJLS) [24, 48, 49, 50]. Further, the stabilization and control syn- thesis of NCSs have been considered in the existing literature under the framework of MJLSs. Xiao et al. [47] designed the delay dependent state feedback controller for NCSs with sensor-to-controller (S-C) delays modeled by Markov chains, and the delay independent output feedback controller for NCSs with both S-C and controller- to-actuator (C-A) delays. In [50], the authors considered a vehicle control problem over lossy communication links where the packet loss process was modeled as the Bernoulli process and the controller was co-located with the actuator, meaning that only the S-C packet loss was considered in this NCS; an H mode dependent output feedback controller was designed. In [192], the authors considered the stabilization problem of NCSs with random communication delays both in the system state and in the S-C links. To consider both S-C and C-A delays in NCSs, and to make full use of the available delay information, Zhang and Shi et al. [53, 55] proposed a two-mode dependent controller that depends on both S-C and C-A delay information for NCSs with time delays modeled by Markov chains. It is noticed that the state feedback con- troller in [55] and the output feedback controller in [53] depend on the both current S-C delay (τk) and previous C-A delay (dk 1 or dk τk 1). If the newest delay information can be incorporated into the controller design, it is desirable to achieve better performance. Hence, a more effective delay dependent control scheme is expected to be dependent on both current S-C delays and current C-A delays. However, when control signals are generated, the current C-A delay is not known to the controller because the C-A delay will occur in the future when the control signal is transmitted through the C-A link. In this chapter, a send all, apply one scheme is developed to design the delay dependent controller that depends on not only the current S-C delay but also the current C-A delay.
众所周知,跟踪控制问题比稳定问题更具挑战性,可以在各个领域找到应用。现有的研究大多集中在稳定性问题上,只有少数研究了NCSs的跟踪问题[193,194,195,196,197]。在[193]中,考虑了具有不确定、时变采样间隔和网络延迟的NCSs的跟踪控制问题。Wu等人[194]提出了一种事件驱动的网络化预测跟踪控制方法,根据被控对象的输出选择控制信号。在[195]中,研究了采样数据系统的H无穷输出跟踪控制;假设时间延迟有上下界。在[196]中,作者研究了恒定采样周期和时变采样周期的NCSs的H无穷控制。Li等在[197]中提出了一种输出跟踪控制器设计方法。然而,基于马尔可夫链模型的随机时滞NCSs的步进跟踪控制在现有文献中尚未得到充分的研究,这也是本章研究的动力所在。
It is well recognized that the tracking control problem is more challenging than stabilization and can find applications in various fields. While most of the exist- ing work focused on the stabilization problem, only a few considered the tracking problem for NCSs [193, 194, 195, 196, 197]. In [193], the tracking control problem for NCSs with uncertain, time-varying sampling intervals and network delays was considered. Wu et al. [194] proposed an event-driven networked predictive tracking control method, where the control signal was selected according to the plant output. In [195], the H output tracking control was studied for sampled-data systems; the time delays were assumed to have lower and upper bounds. In [196], the authors studied the H control for NCSs with constant and time-varying sampling periods. Li et al. proposed an output tracking controller design method in [197]. Nevertheless, the step tracking control of NCSs with random delays modeled by Markov chains has not been fully investigated in the existing literature, which motivates the research in this chapter.
本章的贡献主要有三方面。
1)提出了一种send all, apply one方案来补偿可以被建模为马尔可夫链的C-A延迟。对于可能的C-A延迟,所有与双模式延迟相关的控制信号将计算并发送到执行器节点;根据执行器节点实测的实际C-A延迟,提取相应的控制信号并施加。由于随机C-A延迟是由马尔可夫链控制的,所以特定控制信号的选择也是由马尔可夫链控制的。为了便于控制器的设计,将具有发送全部、应用一个方案的网络控制系统设计为MJLS。本质上,send all, apply one方案源自于在[198,199,200]中应用的基于预测的思想。这一工作将该方案扩展到受马尔可夫链控制的随机延迟的ncs上。
2)提出了一种时滞相关输出反馈控制器。这种控制器依赖于当前的S-C和C-A延迟。与[47]中的延迟独立控制器相比,该控制方案降低了保守性,并将延迟独立控制器作为特例纳入其中。与[55]中的延迟相关控制器相比,所提出的控制器更有效,因为它依赖于当前的C-A延迟,而[55]中的控制器依赖于之前的C-A延迟。
3)引入理想对象响应,我们开发了鲁棒H2和H∞控制方案,以实现基于马尔可夫链模型的具有S-C和C-A时滞的NCSs的带干扰的步进跟踪,这在文献中尚未研究过。
The contributions of this chapter are mainly three-fold.
1)A send all, apply one scheme is applied to compensate for the C-A delays that can be modeled as Markov chains. For possible C-A delays, all the two- mode delay dependent control signals will be computed and sent to the actuator node; according to the actual C-A delay measured at the actuator node, the corresponding control signal will be picked up and applied. Since the random C-A delay is assumed to be governed by the Markov chain, the choice of a specific control signal is also governed by the Markov chain. The NCS with the send all, apply one scheme is then formulated as an MJLS to facilitate the controller design. Essentially, the send all, apply one scheme is originated from the prediction-based idea that has been applied in [198, 199, 200]. This work extends the scheme to NCSs subject to random delays governed by Markov chains.
2)A delay dependent output feedback controller is developed. Such a controller depends on both current S-C and current C-A delays. Compared to the delay independent controller in [47], the proposed control scheme can reduce the con- servativeness and it can include the delay independent controller as a special case. Compared to the delay dependent controller in [55], the proposed con- troller is more effective because it depends on the current C-A delay whereas the controller in [55] depends on the previous C-A delay.
3)With the introduction of the ideal plant response, we develop the robust H2 and H control schemes to achieve the step tracking with disturbance rejection for NCSs with S-C and C-A delays modeled by Markov chains, which has not been studied in the literature.
本章其余部分的组织如下。第7.2节列出了NCSs的问题拟订和目标。7.3节将闭环系统转化为MJLS,在MJLSs框架下解决鲁棒H2和H无穷跟踪问题。数值模拟和实验测试将在7.4节中介绍。最后,结束语在第7.5节中说明。
The remainder of this chapter is organized as follows. The problem formulation of the NCS and the objective are given in Section 7.2. In Section 7.3, the closed-loop system is transformed to an MJLS and the robust H2 and H tracking problems are solved under the framework of MJLSs. Numerical simulations and experimental tests are presented in Section 7.4. Finally, concluding remarks are addressed in Section 7.5.
7.2 问题描述

考虑图7.1中所示的NCSs设置。线性定常设备可以用
![]() (7.1a)
(7.1a)
![]() (7.1b)
(7.1b)
其中 分别为状态向量、控制向量、输出向量和干扰向量。A、B和C是已知的具有适当尺寸的常数矩阵。注意,在图7.1中,干扰ω(k)直接影响延迟控制信号u(k),因此它通过相同的B矩阵进入系统。
分别为状态向量、控制向量、输出向量和干扰向量。A、B和C是已知的具有适当尺寸的常数矩阵。注意,在图7.1中,干扰ω(k)直接影响延迟控制信号u(k),因此它通过相同的B矩阵进入系统。
控制节点和设备节点通过S-C和C-A网络链路连接。这里假设传感器、控制器和执行器是由时钟驱动和同步的。 代表S-C延迟和
代表S-C延迟和 表示C-A延迟,并且和都是有界的
表示C-A延迟,并且和都是有界的
![]() (7.2)
(7.2)
备注 7.1
在当前的问题表述中,可以很自然地考虑到丢包和无序。如果数据包丢失或发生混乱,则应用最近到达的数据包的数据。因此,数据包丢失和无序可以用处理延迟的类似方法来处理。假设连续/连续丢包的数量有上界,这是一个常用的假设[197,201,202],则当前的问题公式可以容纳丢包和混乱。
当前的延迟通常与之前的延迟相关。例如,影响传输时间的网络负载是一个时变因子[46]。所以建模和为两个齐次马尔可夫链是有效的,其值分别为 和
和![]() ,其转移概率矩阵分别为
,其转移概率矩阵分别为![]() 和
和![\Pi = \left [ \pi _{rs} \right ]](http://img.e-com-net.com/image/info8/030f274c25ee4ecdafb018df85a13005.gif) [47,53,55]。这表明和分别以概率
[47,53,55]。这表明和分别以概率 和
和![]() 由模态i跳向模态j和模态r跳向模态s,其定义为:
由模态i跳向模态j和模态r跳向模态s,其定义为:
![]() , (7.3)
, (7.3)
 , (7.4)
, (7.4)
其满足常数 ,并且对于所有的
,并且对于所有的 和
和![]() ,存在
,存在
关于用马尔可夫链建模的时间延迟的更多细节在[47]中给出。
现在,本章的目标是对图7.1所示的NCS实现步进跟踪,具体来说,是找到一个静态输出反馈控制律,既能保证闭环稳定,又能使跟踪误差接近于零。在这里,我们选择静态输出反馈控制方法,因为它的实现简单。
为了使稳态跟踪误差为零,我们遵循[203,204]的思想,引入了(7.1)中系统的理想对象响应。当对于k>0时跟踪误差为零时(即完美跟踪),得到的设备状态和控制信号表示为![]() 。那么,
。那么, 和
和![]() 可以由下面的方程得到
可以由下面的方程得到
 (7.6a)
(7.6a)
![]() (7.6b)
(7.6b)
或者
![]() , (7.7)
, (7.7)
其中,
 。
。
假设A, B, C是满秩的。如果p>m,一般来说,解不存在。因此,我们假设 定义 现在,我们提出了时滞依赖的输出反馈控制器: 其中 一旦 重要的是要注意,控制器(7.9)依赖于在时间点 例如, 为便于表示, 我们注意到,获得当前C-A延迟 备注 7.2 许多关于NCS的研究结果都涉及到设计一个能够在网络环境中用已知模型稳定设备的远程控制器。除了重要的稳定性分析外,对模型不确定性系统的抗干扰和跟踪控制也值得进一步研究。虽然网络控制系统的镇定问题已经得到了广泛的关注,但是关于网络控制系统的抗扰控制的研究结果相对较少[205],特别是当S-C和C-A时滞被建模为马尔可夫链时。 备注 7.3 在[53]中,提出了一种双模依赖输出反馈控制器;然而,控制器依赖于当前的S-C延迟和最近的C-A延迟。通过应用“发送全部,申请一份”方案,控制器不仅依赖于当前的S-C延迟,而且依赖于当前的C-A延迟。这可以被看作是补偿C-A延迟的一种更主动的方式。 7.3 鲁棒的H2和H无穷优化跟踪 在这一节中,我们首先用时滞依赖的控制器(7.9)将(7.8)中的系统重新表述为使用增强技术的MJLS。这进一步使我们能够应用MJLSs的结果来解决这类NCSs的鲁棒H2和H无穷跟踪问题。利用带非凸约束的线性矩阵不等式给出了跟踪问题的充要条件。 7.3.1 将NCS重新定义为MJLS 考虑(7.8)中的系统具有时滞相关控制器(7.9),如果我们增加状态变量为: 然后可以得到下列的闭环控制系统 其中, 如果 如果 这里, 其中z(k)为增广系统输出,Q和R为加权矩阵。为了减少反馈送到设备中的控制输入信号,我们将 备注7.4 在(7.14)中,扩展系统输出 (7.14)中的闭环系统是包含两个齐次模态 定义7.1[49,207] 对于(7.14)的系统在 MJLSs还有其他几种稳定形式,例如均方稳定、指数均方稳定和几乎肯定稳定[50,207]。文献[207]表明,随机稳定性、均方稳定性和指数均方稳定性是等价的,可以称之为二阶稳定。此外,二阶矩稳定对于几乎肯定稳定是充分的,但不是必需的。在本章的其余部分,对稳定性的引都将是随机稳定,或等效的二阶稳定。下面的定理给出了保证随机稳定性的充分必要条件 定理7.1 在(7.9)所提出的控制律下,(7.14)所得到的闭环系统是随机稳定的,对所有的 证明 这个定理可以用与[49]类似的方法来证明。 备注: 值得注意的是,由定理7.1得到以下函数的单调递减性: 其中, 7.3.2 鲁棒的H2跟踪控制 本节的设计目的是指定(7.9)中的控制律,以实现(7.14)中的系统步长跟踪。首先,我们在(7.14)中给出了系统的H2范数的定义,然后通过迭代LMI方法解决了鲁棒H2跟踪控制问题。 定义7.2 [24] 系统(7.14)中的 其中, 1)输入序列表示如下: 2) 3) 以下定理描述了基于状态空间模型的H2范数的表征。 定义7.2 系统(7.14)的H2范数可以由以下方式计算 其中 其中, 证明: 假设 其中, 考虑到(7.21), 从定义7.2中, 注意到, 用 利用导出的H2范数,我们可以研究H2控制问题。 定理7.3 在(7.9)所提出的控制律下,(7.14)闭环系统是稳定的,且 对于所有 证明 根据舒尔补定理,考虑(7.24c), (7.24b)其等价于 然后,从定理7.1,(7.25)得到(7.17)。因此,式(7.14)中的系统是随机稳定的。进一步,通过比较(7.20)、(7.21)和(7.25),并考虑(7.18)的单调性,可以很容易地完成证明。 最后,我们将 7.3.3 鲁棒H无穷跟踪控制 这一部分是关于H无穷跟踪控制问题。更具体地说,我们将研究(7.14)中的闭环系统随机稳定并达到H无穷阶跟踪性能的条件。首先给出了H无穷范数的定义,并进一步给出了定理,证明了当存在满足一定矩阵不等式的矩阵时,H无穷跟踪性能是可以保证的。该定理将在控制器设计中发挥辅助作用,最后通过迭代LMI方法解决H无穷跟踪问题。 定义7.3 [208] 假定(7.14)中的闭环系统是随机稳定的。设 下面的定理是将MJLSs的有界实数引理[50,208]适用于(7.14)中的闭环系统。 定理7.4 在(7.9)所提出的输出反馈控制律下,(7.14)闭环系统是随机稳定的,且 对于所有的 证明: 根据[208]中的有界实数引理,我们很容易得到这些结果。这里省略了详细的程序。 在下面的定理中,基于定理7.4,用带非凸约束的线性矩阵不等式给出了H无穷跟踪控制问题的充要条件。 定理7.5 在输出反馈控制律(7.9)下,闭环系统(7.14)是随机稳定的,且 对于所有的 证明: 使用舒尔补定理,并让 通过解决以下优化问题可以实现H∞鲁棒跟踪控制设计: 条件(7.24)和(7.30)包含非凸约束。这可以通过产品约简算法(product reduction algorithm, PRA)[209]来解决,PRA是一种迭代LMI方法。如何应用PRA解决式(7.26)和式(7.31)中的优化问题的具体步骤可参考文献[210]。 备注7.6 在实际应用中,很难得到动态系统的精确数学模型。因此,(7.1)中具有范数有界不确定性的对象模型可以考虑如下: 其中A、B、C是已知的实值常量矩阵,∆A(k)和∆B(k)是表示参数不确定性的实时时变矩阵函数。也假设 其中, 使用7.3节中类似的增强技术,闭环系统可以被表述为带有范数有界不确定性的MJLS。分别根据定理7.3和定理7.5可以很容易地解决相关的H2和H无穷控制综合问题。 7.3.4 H2和H无穷混合追踪控制设计 在许多实际应用中,往往需要在H2和H无穷控制性能之间做出折衷。通过混合H2和H无穷控制综合,可以实现折衷:将系统H无穷范数设为一个规定值,然后使系统H2范数最小。(7.14)中系统的混合H2和H无穷跟踪控制可归纳为:设γ为规定值,并且 7.4 仿真和实验结果 在本节中,我们提供了垂直起降(VTOL)直升机系统和直流电机系统的仿真和实验结果。 7.4.1 在一个VTOL系统中的数值实验结果 在本节中,给出了垂直起降直升机[211]的设计实例,以演示所提方法的适用性和有效性。采样周期为0.01s的垂直起降直升机的离散时间状态空间模型为 A的特征值分别为0.9977、0.7995、1.0028+0.0026i、1.0028-0.0026i。因此,设备是不稳定的。假设网络控制系统中所涉及的随机延迟为 这里,最大的C-A延迟是d = 1。考虑到时间戳信息,传输数据包的数据部分为 其使用的是IEEE 754标准 将网络性质引入控制器设计过程中,选择以下权重矩阵:Q = C, R =[0.01 0.01]。当需要提高控制性能时,可采用启发式方法选择权矩阵Q和权矩阵R,最小H2范数 所得到的阶跃响应,对应于提出的H2控制器和一个本地H2控制器,如图7.2所示。这里,本地H2控制器增益计算为[-56.0196 -10.5998]T,与时延无关。在这个仿真中,一个脉冲干扰被添加到控制信号的时间为300的瞬间。从图7.2可以看出,本文提出的H2控制器既有较好的暂态响应,又有较好的抗干扰性能。 同理,H无穷控制器也可以选择与H2控制器相同权重的矩阵来设计。最小H无穷范数 还是在时间为300的瞬间增加了脉冲干扰。在步进跟踪上与本地H控制器的比较如图7.3所示。结果表明,所提出的H无穷控制器具有较好的暂态响应和抗干扰性能。在PC机(3.0 GHz, 2.0 GB RAM)上,两台控制器的总计算时间为8.23小时。值得注意的是,计算是离线进行的,不需要在线计算来确定控制器参数。 作为比较,跟踪误差的平方和如表7.1所示。该控制器的性能优于不考虑网络时延的局部控制器。 7.4.2 网络化直流电机系统的数值仿真 在本节中,我们以一个网络化直流电机控制系统的设计来证明所提方法的有效性。 所识别的直流电机型号为: 输入是电压,输出是电机的角位置。选择采样周期为0.05s,得到如下状态空间模型: 假设NCS的随机时延为 最小H2范数 在PC机上(3.0 GHz, 2.0 GB RAM内存),两个控制器的总计算时间为1.93小时。 参考信号 作为对比,将Smith预测器应用于同一网络电机系统,仿真结果如图7.4(红色虚线)所示[212]。Smith预估器用于补偿S-C延迟,而“发送全部,应用一个”也用于补偿C-A延迟。从仿真结果来看,采用H无穷和H2控制器的响应速度要比采用Smith预测器的响应速度快。然而,缺点是,应用H无穷和H2控制器的超调幅度更大。此外,所提出的H无穷和H2控制器在抗干扰方面优于Smith预测器。 7.4.3 网络化直流电机系统的实验测试 为了进一步说明所提方法的有效性和适用性,我们对一个网络直流电机系统进行了硬件在环(HIL)测试(图7.5)。为了证明与数值模拟结果的一致性,采样率也选择为0.05s。 该实验装置由PC机、接口板和带传感器的直流电机组成。在PC机上用Matlab/Simulink实现了网络控制器。接口板的作用是:1)将PC机的控制信号转换为脉宽调制信号来驱动电机;2)将传感器输出的电机信号转换成数字格式并发送到PC机。在实验测试中,PC控制器和直流电机通过一个模拟网络连接,其中的随机延迟由(7.34)中的过渡矩阵来表征。为了比较,参考信号和干扰信号选择与仿真中相同。 设计了一个局部H无穷控制增益:K=-0.4515并应用于HIL测试。将局部控制器应用于网络直流电机系统的仿真和实验结果如图7.8所示。采用(7.36)和(7.37)中的H无穷和H2控制器,实验结果分别如图7.6和图7.7(实线)所示。显然,提出的H无穷和H2控制器优于本地H无穷控制器。从图7.6和图7.7可以看出,仿真结果与实验结果吻合较好,表明所提出的控制器在实际应用中确实是有效的。 跟踪误差在0-50s和5-50s的平方和列于表7.2。采用所提出的控制器,控制性能得到了显著提高,特别是在5 ~ 50s时间段内。 备注7.7 从实验结果(图7.6和图7.7中的蓝色实线)来看,应用本文提出的H无穷和H2控制器的稳态误差分别为-0.0348 rad和0.0172 rad,即-1.16%和0.57%。实验结果中的稳态误差虽小,但也不足为奇,因为在实验装置中存在不可避免的建模误差和不可避免的非线性,如死区和电刷摩擦。考虑非线性摩擦的非线性NCSs控制器设计值得研究,而且目前仍在研究中。还应注意到死区是电动机的固有特性。为了进一步提高稳态跟踪性能,其他控制技术可在此应用,例如:1)动态控制器;2)反馈加前馈控制设计。 备注7.8 注意,在实验测试中,模拟网络中相关的随机延迟是用固定的(精确已知的)转移矩阵来表征的。在实践中,为了确定马尔可夫链的概率转移矩阵,我们需要测量和记录网络引起的延迟和/或数据包丢失。在对采集到的数据进行分析的基础上,首先确定模态的个数,然后识别出概率转移矩阵。此外,由于精确测量延迟的困难,所识别的概率转移矩阵可能不准确。因此,研究不确定性和未知参数对概率转移矩阵的影响也是一个有意义的研究领域。这两个问题都值得进一步研究。 7.5 结论 在这一章中,我们研究了具有马尔可夫链模型的S-C和C-A时滞的网络控制系统的步进跟踪问题。重点研究了基于时滞的双模控制器的设计,以实现步进跟踪和干扰抑制。通过采用“全发送,应用一个”方案,控制器依赖于当前的S-C和C-A延迟。这种控制方案比那些不能将当前C-A延迟纳入控制器设计的控制方案更有效。利用增广技术将闭环系统转化为MJLS。在MJLS框架下解决了H2和H无穷跟踪控制问题,实现了对干扰的抑制。仿真和实验结果验证了该方法的有效性。值得注意的是,使用半马尔可夫过程[213,214]来建模网络诱导延迟的更一般的方法能够更好地反映实际中的网络特性。因此,所得到的闭环NCSs属于S-MJLSs的广义类。 8. 总结和将来工作 本文研究了S-MJLSs的稳定与控制问题,并讨论了利用交换系统方法进行网络化动态系统设计的问题。研究了S-MJLSs的鲁棒和最优控制问题。此外,对网络动态系统进行了分析和设计,并通过数值仿真和/或实验进行了验证。然而,在本文发展的定理基础上,还有更多的研究课题值得进一步研究。在这一章中,首先对本文进行了总结,然后是未来研究的一些课题。 This thesis investigates stabilization and control problems for S-MJLSs and discusses the networked dynamic system design via switching system approaches. Robust and optimal control problems for S-MJLSs are studied. Furthermore, analysis and design for networked dynamic systems have been conducted and verified by using numerical simulations and/or experiments. Nevertheless, based on the developed theorems in the thesis, more research topics deserve further research attention. In this chapter, a summary of the thesis is firstly provided, followed by some topics in the next research step in the future. 8.1 论文的总结 通过考察马尔可夫过程和MJLSs的局限性,重新考察了半马尔可夫过程,并研究了依赖于半马尔可夫过程的跳变线性系统。与文献中已有的结果相比,本论文的重点是可以用于实践的结果的发展。文献中的一些方法依赖于求解一组很难求解的积分方程,因此这些方法还不能用于工程应用。文献中的其他方法使用马尔可夫过程来近似半马尔可夫过程,然后利用马尔可夫过程或MJLSs的结果来解决S-MJLS的稳定和控制问题。 By examining the limitations of Markov processes and MJLSs, the semi-Markov pro- cess is revisited and jump linear systems depending on semi-Markov processes are studied. Compared with the existing results in the literature, this thesis focuses on the developments of results that could be used in practice. Some approaches in the literature rely on a solution of a set of integral equations which are hard to solve, so those approaches are not ready for engineering applications. Other approaches in the literature use Markov processes to approximate the semi-Markov processes and then deploy the results from Markov processes or MJLSs to solve the S-MJLS stabilization and control problems. 本文首次针对S-MJLSs提出了系统的数值实现方法。系统稳定性分析的过程使设计者能够意识到S-MJLS是随机稳定的。本文还提供了一个设计不稳定S-MJLSs控制器的标准程序。在工程应用中,动态系统或过程的数学模型往往存在不确定性。研究了这类不确定系统的控制器设计问题。与已有的应用马尔可夫近似的控制结果相比,本文所提出的控制策略可改善控制性能。数值模拟结果说明了改进的方法。为了研究NCS,研究了时滞S-MJLS,不仅得到了镇定条件,而且设计了H无穷最优控制器。 In this thesis, systematic numerically implementable methods are proposed for S-MJLSs for the first time. The procedure of the systematic stability analysis enables the designer to be aware that if an S-MJLS is stochastically stable. The thesis also 132 provides a standard procedure to design controllers for unstable S-MJLSs. In the engineering applications, mathematical models of dynamic systems or processes often suffer from uncertainties. Controller design problems for such uncertain systems are also studied. Compared with the existing results where Markov approximations are applied, the control performance is improved by applying the proposed control strategies in this thesis. The improvements are illustrated in numerical simulation results. In order to study the NCSs, the delayed S-MJLS is studied, where not only the stabilization conditions are obtained, but also the H optimal controller is designed. 本文提出了两种设计NCS控制器的方法。一种方法是为预先配置好的智能执行器提供冗余控制信号,由智能执行器确定C-A延迟并选择合适的控制信号。通过这种方式,C-A延迟可以得到很好的补偿。采用这种补偿技术的跟踪控制器在网络直流电机装置上进行了试验。在不补偿C-A延迟的情况下,用不同的控制律对相同的网络直流电机装置进行了类似的实验。利用本文的控制律,可以观察到控制性能的明显改善。另一种方法是充分利用系统状态的历史信息。在文献中,当控制器计算控制信号时,过时的设备测量通常被丢弃,只使用最新的可用测量。对于某些特殊类型的网络系统,其中安装了多个传感器来测量设备/过程的不同状态,我们开发的控制策略不仅使用最新数据,还使用历史测量。在考虑了历史数据后,得到了更平滑的瞬态响应。上述两种方法为NCSs控制器的设计提供了两点启示:1)借鉴历史;2)规划未来。 Two approaches have been developed to design controllers for NCSs in this thesis. One approach is to provide redundant control signals to the pre-configured smart actuator, then the smart actuator could determine the C-A delay and select the appropriate control signals. In this way, the C-A delays can be well compensated. The tracking controller by using this compensation technique is tested on networked DC motor devices. Similar experiments using different control laws have been conducted for the same networked DC motor device without compensating for the C-A delays. A clear improvement in control performance is observed by utilizing the control laws in this thesis. The other approach is to make the most of the historical information of the system state. In the literature, when the controller calculates the control signal, the outdated measurement of the plant was usually discarded and only the most recent available measurement was used. For certain special types of networked systems where multiple sensors are mounted to measure different states of the plant/process, we develop control strategies using not only the most recent data but also the historical measurement. After taking the historical data into account, a smoother transient response is obtained. The two aforementioned approaches developed in this thesis provide two hints on the controller design for NCSs: 1) Learn from the history; 2) plan for the future. 由于半马尔可夫过程可以很自然地描述系统部件的工作和故障状态,因此将其应用于容错控制分析中。本文研究了一个元件寿命服从非指数分布的系统,并给出了容错控制方案。使用半马尔可夫过程的目的是为了使系统部件的故障率不一定是恒定的,因为故障率函数理论上可以是任何形状的。事实上,可靠性工程的研究表明,故障率往往呈现浴缸形状,即时变函数。利用所设计的容错控制器,对某垂直起降飞行器执行器故障进行了数值仿真。使用所提出的容错控制器可以观察到改进。 Since semi-Markov processes can naturally describe the working and failure status of system components, the semi-Markov processes are used in fault tolerant control analysis. In the thesis, a system whose component s life time follows non- exponential distributions is studied and fault tolerant control schemes are provided. The purpose of using semi-Markov processes is that the failure rate of the system components may not necessarily be constant, because the failure rate function could theoretically be in any shapes. As a matter of fact, the research from reliability en- gineering shows that the failure rate often exhibits bathtub shapes, i.e., time-varying functions. With the designed fault tolerant controller, the numerical simulation for a VTOL vehicle with actuator failures is conducted. Improvements are observed using the proposed fault tolerant controllers. 利用随机过程对虚拟环境中的复杂平面进行建模。在虚拟环境中,虚拟角色在虚拟墙上以一维交互方式移动。虚拟墙由几种材料组成,所以角色的随机行走会导致角色和墙之间的随机互动。随机相互作用是由随机过程建模的,因此得到的闭环系统是一个跳跃线性系统。通过所设计的控制器实现对多材料墙体的感知,并由操作者感知多材料墙体,从而实现虚拟环境的渲染。 The stochastic process is used to model a complex planar surface in the virtual environment. In the virtual environment, the avatar is moving with one-dimensional interaction on the virtual wall. The virtual wall consists of serval materials, so the random walking of the avatar results in a random interaction between the avatar and the wall. The random interaction is modeled by a stochastic process, so the resulting closed-loop system is a jump linear system. With the designed controller, the perception of a multi-material wall is realized and the multi-material wall is felt by the operator, therefore the virtual environment rendering is achieved. 8.2 今后的工作 本文解决了一类跳变线性系统的一些基本问题,并将其应用于网络控制系统和容错控制系统。然而,我们认为还有许多研究问题没有得到解决,特别是在NCS中的应用。在将来,我们将把目前的结果扩展到更一般的场景和实际情况。 This thesis has solved some basic problems for a type of jump linear systems and has applied the results on NCSs and fault tolerant control systems. Nevertheless, we believe that lots of research problems have not been solved, especially the applications in NCSs. In the future, we will extend the current results to more general scenarios and practical situations. 8.2.1 S-MJLSs在NCSs中的应用 对于网络控制系统,本文采用马尔可夫过程建模时间延迟;预计半马尔可夫过程可以提高网络时延的预测精度。因此,我们建议研究用半马尔可夫过程模拟S-C和C-A时滞的网络控制系统的稳定性和控制问题。这个想法是第5章中所使用的想法的自然延伸。在第5章中,历史信息被用来捕捉系统动力学的行为,而在本提出的研究课题中,历史信息被用来提高未来通信延迟预测的精度。如图8.1所示,不仅可以预测 For the NCSs in this thesis, the time delays are modeled by Markov processes; it is anticipated that the semi-Markov process could improve the precision of predicting the network-induced delays. So we propose to study the NCS stability and control problems where S-C and C-A delays are modeled by semi-Markov processes. This idea is a natural extension of the one used in Chapter 5. The historical information is used to capture the behavior of the system dynamics in Chapter 5, while in this proposed research topic, the historical information is applied to improve the precision of future communication delay predictions. As depicted in Figure 8.1, not only τk 1 but also τk 2, τk 3, τk 4, and so on are used to predict τk; similarly, not only dk 1 but also dk 2, dk 3, dk 4, and so on are used to predict dk. With the proposed problem formulation, it is expected that the control performance will be improved. 在上述框架下的几个挑战是:(1)数据包的无序。当数据包发生混乱时,预测模型将依赖于一组不完整的历史信息。一个潜在的技术来解决这一挑战是建立一个预测模型根据部分已知的延迟值。(2)数据包丢失。这也会导致以前的不完全延迟。在混乱的情况下,延迟的数据包将在稍后的时间到达控制器或执行器。相反,在丢包情况下,丢失的数据包将永远不会到达控制器或执行器。因此,区分混乱和丢包是一种更好的选择,但也是一种挑战。(3)使用历史数据的长度。太短的历史记录可能无法捕获延迟变化动态,而太长历史记录可能会消耗太多的计算资源,而预测方面的改进有限。 Several challenges under the aforementioned framework are: (1) Data packet dis- order. If packet disorder happens, the prediction model will depend on an incomplete set of historical information. A potential technique to tackle this challenge is to construct a prediction model according to partially known delay values. (2) Data package dropout. It would also result in an incomplete set of previous delays. In the disor- der case, the delayed packets will arrive at the controller or the actuator at a later time. In contrast, the lost packets will never arrive at the controller or the actuator in the packet dropout scenario. So it is preferable yet a challenge to distinguish the difference between the disorder and dropout. (3) Length of the historical data to be used. A too short history may not be able to capture the delay variation dynamics, while a too long history may cost too many computational resources with limited improvements in the prediction. 8.2.2 事件触发S-MJLSs 使用事件触发方案的主要目的是为了减少通信网络中的网络负载[215,216]。图8.2说明了这个想法。与图1.3中的标准NCS设置相比,从传感器到控制器的通信通道中增加了一个额外的系统组件事件触发开关。假设要控制的过程是一个化学过程,测量的过程值是反应炉的温度。热电偶(即传感器)检测从k到k +8的值,以此类推。当状态变化不剧烈时,我们假定过程保持相同的温度,不需要任何控制动作。因此,在网络资源有限的情况下,没有必要发送冗余信息。对于图8.2中的示例,k、k + 4、k + 7和k + 8处的测量值包含更多的信息。我们称之为关键测量。 The main purpose of using event-trigger scheme is to reduce the network load in communication networks [215, 216]. The idea is illustrated in Figure 8.2. Compared with the standard NCS setup in Figure 1.3, an additional system component event- trigger switch is added in the communication channel from sensors to the controller. Suppose that the process to be controlled is a chemical process, and the measured process value is the temperature in a reaction kettle. The thermocouple (i.e. sensor) detects the value from k to k +8 and so on. When the state variation is not dramatic, we assume that the process preserves the same temperature and no control actions are required. Therefore, it is not necessary to send the redundant information when the network recourses are limited. For the example in Figure 8.2, the measurements at k, k + 4, k + 7, and k + 8 contain more information. We call them key measurements. 事件触发开关能够确定哪些测量值是关键的,然后将它们标记为关键测量值,并将其传输给控制器。非关键测量值将被丢弃。大量的研究成果讨论了合适的触发方案。最常见的有:1)基于幅度的脉冲控制触发[217];2)基于错误的触发[218];3)基于死区触发[219]。图8.2所示的触发方案为第二种类型。 The event-trigger switch is able to determine which measurements are critical and then labels them as key measurements, which would be transmitted to the controller. The non-key measurements would be discarded. A lot of research results discuss the proper triggering schemes. The most popular ones are: 1) Magnitude based triggering with impulse control [217]; 2) error based triggering [218]; and 3) deadzone based triggering [219]. The triggering scheme shown in Figure 8.2 is of the second type. 在系统配置中,假设时间延迟遵循半马尔可夫过程。文中确定了几个挑战。(1)控制器应该能够在几个时间步内预测网络引起的延迟。两种常用的多步预测随机过程模式的方法是状态增广和构造多步转移率矩阵。使用状态增广的缺点是所产生的随机过程的维数将急剧增加,因此理想的方法是构造多步转移率矩阵。在马尔可夫链中,研究了[56]中的n阶跃迁率矩阵。因此,第一个挑战是确定随机过程模式在更长的未来。第二个挑战是选择一个合适的事件触发方案。如前所述,文献中有几种事件触发方案。在保证控制性能的前提下,选择最合适的控制策略是至关重要的。第二个挑战实际上是一个网络和控制协同设计问题。 In the system configuration, the time delays are assumed to follow semi-Markov processes. Several challenges are identified. (1) The controller should be able to predict the network-induced delays in several time steps. Two popular ways to predict the stochastic process mode in several steps are state augmentation and constructing a multi-step transition rate matrix. The flaw of using the state augmentation is that the dimension of the resulting stochastic process will increase drastically, so it is ideal to construct the multi-step transition rate matrix. In Markov chains, the n-step transition rate matrix has been studied in [56]. Therefore, the first challenge is to determine the stochastic process mode in a longer future. (2) The second challenge is to choose a proper event-trigger scheme. As mentioned before, several event-trigger schemes exist in the literature. It is crucial to select the most appropriate one that costs least communication load and guarantees satisfactory control performance. The second challenge is actually a network and control co-design problem. 参考文献 ,如果p = m,则通过N的标准矩阵反转可以得到唯一解。如果p
,如果p = m,则通过N的标准矩阵反转可以得到唯一解。如果p ,
, ,
, ,则可以得到这样的系统
,则可以得到这样的系统![]() , (7.8a)
, (7.8a) (7.8b)
(7.8b) (7.9)
(7.9)![]() 为控制节点的控制信号,
为控制节点的控制信号,![]() (7.10)
(7.10)![]() 被设计,控制信号
被设计,控制信号![]() 可由(7.10)得到
可由(7.10)得到![u(k) = \left [ \Omega _{22} - K(\tau_{k},d_{k}) \right ]\bar{r} + K(\tau_{k},d_{k})y(k-\tau_k)](http://img.e-com-net.com/image/info8/a413fedd56ba4e87a895147fc905d762.gif) (7.11)
(7.11) 的当前的S-C延迟和当前的C-A延迟
的当前的S-C延迟和当前的C-A延迟 。然而,一个问题就出现了:S-C延迟时可以使用时间戳技术获得的即时k,而当前的C-A延迟的不可由控制器知道,因为它还没有发生。为了解决这个问题,我们需要利用网络带来的优势:可以同时打包和传输一系列信号[125,199]。在此基础上,提出了一种"集发送、应用于一体"的方案来解决上述问题。具体方案如下。当控制节点接收到输出信息
。然而,一个问题就出现了:S-C延迟时可以使用时间戳技术获得的即时k,而当前的C-A延迟的不可由控制器知道,因为它还没有发生。为了解决这个问题,我们需要利用网络带来的优势:可以同时打包和传输一系列信号[125,199]。在此基础上,提出了一种"集发送、应用于一体"的方案来解决上述问题。具体方案如下。当控制节点接收到输出信息 时,控制器根据已知的计算出所有可能的的一系列控制信号,并以数据包的形式发送给执行器节点。因此,控制序列数据包为
时,控制器根据已知的计算出所有可能的的一系列控制信号,并以数据包的形式发送给执行器节点。因此,控制序列数据包为 (7.12)
(7.12)![]() 表示当
表示当![]() 时,根据已知的在时刻k上产生的控制信号。在时刻k,考虑C-A延迟,执行器/设备节点的控制序列数据包为
时,根据已知的在时刻k上产生的控制信号。在时刻k,考虑C-A延迟,执行器/设备节点的控制序列数据包为 (7.13)
(7.13)![]() 简写为
简写为![]() 。在执行器/设备节点,通过时间戳技术可以得到当前的C-A延时,并且可以存储并知道之前的延时。由于控制信号(7.13)是在时刻
。在执行器/设备节点,通过时间戳技术可以得到当前的C-A延时,并且可以存储并知道之前的延时。由于控制信号(7.13)是在时刻![]() 产生的,因此根据执行器/设备节点已知的
产生的,因此根据执行器/设备节点已知的![]() 值来选择控制信号。例如,在时刻k,如果
值来选择控制信号。例如,在时刻k,如果 ,则在(7.13)中的所有d+1个信号中,
,则在(7.13)中的所有d+1个信号中,![]() 将被提取并实现为控制信号。这样就可以根据当前的S-C和C-A延迟设计控制器。的另一种可能的方法是估计马尔可夫链的状态,这一方法仍在研究中。
将被提取并实现为控制信号。这样就可以根据当前的S-C和C-A延迟设计控制器。的另一种可能的方法是估计马尔可夫链的状态,这一方法仍在研究中。![]() ,
, , (7.14a)
, (7.14a)![]() , (7.14b)
, (7.14b) . (7.14c)
. (7.14c)![]() ,则
,则,
![]() ,则
,则,
 是当
是当![]() 时矩阵
时矩阵 的第一行的第
的第一行的第![]() 个块,并且
个块,并且![]() 被定义如下,
被定义如下,![]() , (7.15)
, (7.15)![]() , (7.16)
, (7.16) 并入增强系统输出z(k),而不是在通过C-A链路传输之前使用原始控制信号。
并入增强系统输出z(k),而不是在通过C-A链路传输之前使用原始控制信号。 是状态信息和控制信号的加权组合。引入z(k)可以方便下面的控制器设计,使和控制信号最小化。通过调整权重因子Q和R,可以在和的结果性能之间进行一定的权衡。例如,较大的Q可以快速稳定状态[206],这样就可以以较大的控制信号为代价实现快速定位。在实践中,Q和R的选择应根据具体的应用要求来确定。
是状态信息和控制信号的加权组合。引入z(k)可以方便下面的控制器设计,使和控制信号最小化。通过调整权重因子Q和R,可以在和的结果性能之间进行一定的权衡。例如,较大的Q可以快速稳定状态[206],这样就可以以较大的控制信号为代价实现快速定位。在实践中,Q和R的选择应根据具体的应用要求来确定。 的MJLS。相应的转移概率矩阵是
的MJLS。相应的转移概率矩阵是![]() ,其中为矩阵的克罗内克积。下面,我们回顾一下这个系统的随机稳定性的定义。
,其中为矩阵的克罗内克积。下面,我们回顾一下这个系统的随机稳定性的定义。 的情况下时随机稳定的条件是:当且仅当对于每一个初始状态
的情况下时随机稳定的条件是:当且仅当对于每一个初始状态 ,存在一个有限的,使下面的不等式成立
,存在一个有限的,使下面的不等式成立
 ,当且仅当存在对称矩阵
,当且仅当存在对称矩阵![]() 使下列矩阵不等式:
使下列矩阵不等式: (7.17)
(7.17) (7.18)
(7.18) 是定理7.1的解。假设
是定理7.1的解。假设![]() 和
和![]() 都满足(7.17),并且如果
都满足(7.17),并且如果![]() ,那么可以得到
,那么可以得到![]() 。同样,如果
。同样,如果![]() ,那么可以得到
,那么可以得到![]() 。单调递减的特性将用于H2跟踪控制器的设计。范数定义是:
。单调递减的特性将用于H2跟踪控制器的设计。范数定义是: (7.19)
(7.19)![]() 是系统(7.14)的输出序列,当
是系统(7.14)的输出序列,当![]() ;
; 是由在某位置为1而在其他位置为0形成的单一向量;
是由在某位置为1而在其他位置为0形成的单一向量;
![]()
 的初始分布由
的初始分布由![]() ,其中
,其中 并且
并且
(7.20)
![]() 是由以下离散时间方程得到的解:
是由以下离散时间方程得到的解: (7.21)。
(7.21)。![]() 是系统(7.14)的一个脉冲响应。然后对于
是系统(7.14)的一个脉冲响应。然后对于![]() ,考虑(7.21),可以得到
,考虑(7.21),可以得到 (7.23)
(7.23)![]() 表示满足(7.17)中的条件。则(7.14)中的系统是随机稳定的。因此,我们得到
表示满足(7.17)中的条件。则(7.14)中的系统是随机稳定的。因此,我们得到![]() 时,
时, 。
。 ,可以得到,和
,可以得到,和 分别表示
分别表示 和
和 ,给出了
,给出了![]() 初始分布的一般形式。变量变换后,证明就完成了。
初始分布的一般形式。变量变换后,证明就完成了。![]() ,当且仅当矩阵
,当且仅当矩阵 和对称矩阵
和对称矩阵![]() 存在且满足下列非凸约束不等式
存在且满足下列非凸约束不等式 (7.24a)
(7.24a) (7.24b)
(7.24b)![\bar{X}(i,r) \left [ \sum_{r=0}^{\tau} \sum_{s=0}^{d} \lambda_{ij} \Pi_{rs}P(j,s) \right ] = I](http://img.e-com-net.com/image/info8/39da7b4c3c3349b8977aea84cea09eec.gif) (7.24c)
(7.24c) 成立。
成立。 (7.25)步长跟踪控制问题总结如下。鲁棒跟踪控制设计可以通过解决以下优化问题来实现
(7.25)步长跟踪控制问题总结如下。鲁棒跟踪控制设计可以通过解决以下优化问题来实现![]() (7.26)
(7.26) ,定义(7.14)中系统的H无穷范数为
,定义(7.14)中系统的H无穷范数为![]() (7.27)
(7.27)![]() ,当且仅当存在矩阵和对称矩阵
,当且仅当存在矩阵和对称矩阵![]() 且满足下列不等式
且满足下列不等式 (7.28)
和![]() ,其中
,其中 (7.29)
(7.29)![]() ,当且仅当存在矩阵和对称矩阵
,当且仅当存在矩阵和对称矩阵![]() 且满足下列不等式
且满足下列不等式 (7.30a)
(7.30a)![]() (7.30b)和
(7.30b)和![]() 成立
成立![]() ,这个定理可以很容易地完成证明。
,这个定理可以很容易地完成证明。![]() (7.31)
(7.31)![]()

![]() 是已知的实常数矩阵,
是已知的实常数矩阵, 是满足的未知时变矩阵函数
是满足的未知时变矩阵函数![]()
![]() (7.33)
(7.33)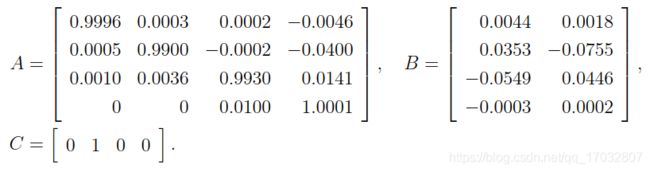
![]() 和
和![]() ,其具有下列转移概率矩阵
,其具有下列转移概率矩阵
![]() 最小值为0.1225,所提出的时滞相关控制器为
最小值为0.1225,所提出的时滞相关控制器为
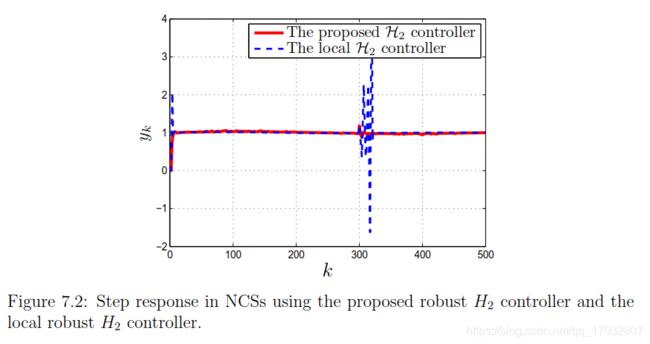
 为0.3464,所提出的时滞相关控制器为
为0.3464,所提出的时滞相关控制器为

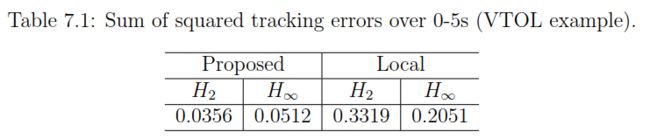

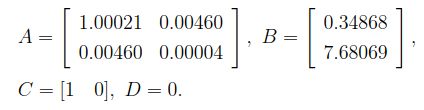
![]() 和
和![]() ,转移概率矩阵为(7.34)。加权矩阵取Q = C, R = 0.01。根据所提出的控制器设计方法,最小H无穷范数为17.4085,H无穷控制器参数为
,转移概率矩阵为(7.34)。加权矩阵取Q = C, R = 0.01。根据所提出的控制器设计方法,最小H无穷范数为17.4085,H无穷控制器参数为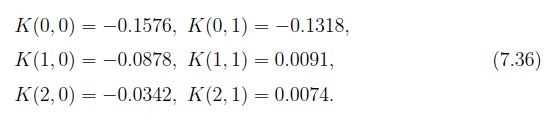
![]() 最小值为5.0147,H2控制器参数为
最小值为5.0147,H2控制器参数为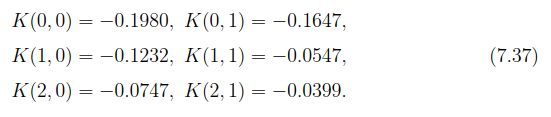
![]() 为幅度为3 rad的阶跃信号,在时间为30s的瞬间加2个采样周期的0.1rad的扰动信号。(7.36)和(7.37)中使用设计的H无穷和H2控制器的仿真结果如图7.6和图7.7(虚线)所示。仿真结果表明,该方案具有良好的跟踪性能,是有效的。
为幅度为3 rad的阶跃信号,在时间为30s的瞬间加2个采样周期的0.1rad的扰动信号。(7.36)和(7.37)中使用设计的H无穷和H2控制器的仿真结果如图7.6和图7.7(虚线)所示。仿真结果表明,该方案具有良好的跟踪性能,是有效的。


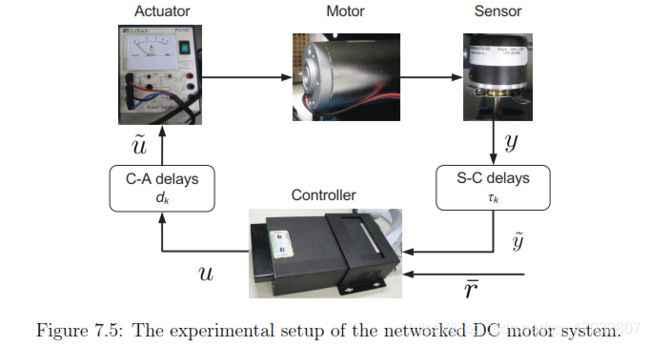

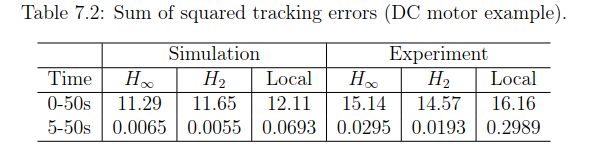
![]() ,还可以预测
,还可以预测 等来预测
等来预测![]() 。同样,不仅用
。同样,不仅用![]() ,还用
,还用 等来预测。利用所提出的问题公式,可望改善控制性能。
等来预测。利用所提出的问题公式,可望改善控制性能。