Matlab之基于MTI雷达生成表面杂波和目标回波(附源码)
目录
一、MTI 雷达基础知识
1.1 MTI 过滤器
1.2 平台几何形状
1.3 性能指标
二、宽边 MTI 仿真
2.1 场景配置
2.2 配置雷达
2.3 配置方案
2.4 配置平台
2.5 模拟杂波和目标返回信号
2.6 偏移目标位置
三、斜视 MTI 模拟
四、结论
五、程序
本示例展示了如何生成表面杂波和目标回波,以便模拟移动目标指示器 (MTI) 雷达。 执行 MTI 滤波并检查生成的距离剖面和多普勒光谱。通过观察宽侧和斜侧轨迹以及雷达天线主瓣内的目标位置来证明平台几何形状的影响。
一、MTI 雷达基础知识
MTI是一种脉冲雷达的杂波缓解方法,它涉及慢时滤波器并产生距离剖面的时间序列,其中来自静止物体的返回已被滤除。这是脉冲多普勒处理的更简单的替代方案,脉冲多普勒处理不会产生目标的速度估计,尽管仍然可以对目标检测执行到达方向估计。
1.1 MTI 过滤器
MTI滤波器是一种陷波滤波器,配置为去除表面杂波多普勒频率处的信号分量。导数滤波器因其简单性而常用,其中一阶和二阶差分是最常见的。此示例将使用三脉冲消除器,它是阶数为 2 阶且长度为 3 的导数滤波器,并使用中心差分。这种滤波器易于实现,并且由于阶数比长度小 1,因此每个多普勒歧义只有一个零值。通常,对于特定应用,可以在通带宽度、衰减和零频率数量之间找到平衡。
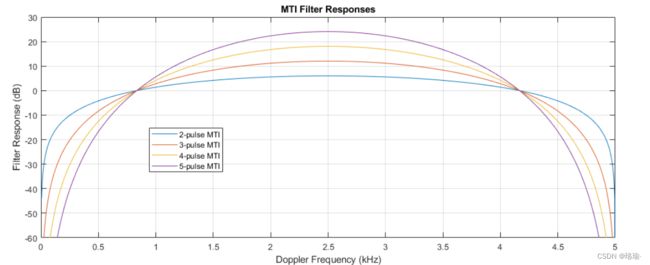
下图显示了长度为2至5,PRF为5 kHz的脉冲消除器的滤波器响应。请注意,它们都会衰减接近0 Hz的信号,通带宽度和滚降程度不同。这种标称滤波器类型适用于杂波返回中心约为0 Hz的宽侧轨迹。如果使用斜视轨迹,滤波器可以在频率上偏移,以切出杂波质心的预期频率。
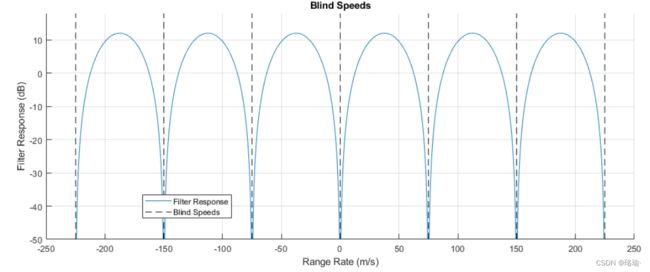
请注意,接收信号的频谱分量在PRF处包裹,因此PRF的任何整数倍处的信号都落在滤波器的零点中。赋予接近这些整数倍的多普勒频率的径向速度称为盲速度,因为即使目标可能处于运动状态,其多普勒频率也与杂波返回的频率一致。另请注意,标称滤波器响应在0 Hz左右对称,相同幅度的正负范围速率的滤波方式相似。下图显示了 5 kHz PRF 的 -3 到 +3 倍之间的所有多普勒频率的长度 3 滤波器响应,其中多普勒对应于垂直线表示的盲速度。
对于仅通过距离测量可检测的目标,目标信号功率必须超过目标范围门内的总杂波信号功率。MTI滤波的目标是尽可能多地降低杂波信号功率,同时保留大部分目标信号功率。
1.2 平台几何形状
表面杂波分布在 360 度方位角、几乎 90 度仰角上,并且范围仅受地平线限制。当被锥形光束照射时,表面杂波的表现取决于光束的几何形状(形状和指向方向)以及雷达平台的运动。使用MTI处理的表面目标的可检测性取决于这种杂波呈现以及目标的径向速度,后者由目标运动的绝对速度和方向定义。检测所需的正或负范围速率可能取决于目标在主瓣内的位置。如果目标朝向雷达移动,则可能检测到位于杂波的高多普勒边缘,但如果它以相同的速度远离雷达,则无法检测到。因此,在所有情况下,目标的可探测速度都存在不对称性,但目标沿视轴分布的宽侧轨迹除外。
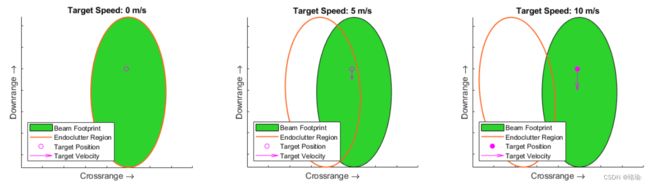
下图说明了当目标速度固定在上距离方向时,范围/跨范围的内杂波区域如何随目标速度变化。在前两个子图中,示例目标落在内杂波区域,并且无法通过 MTI 处理检测到。在第三个子图中,目标移动得足够快,落在杂波区域,应该可以通过 MTI 处理检测到。
下图说明了目标运动方向如何影响径向速度,从而影响目标的可检测性。在这种情况下,目标靠近波束足迹的高多普勒边缘,并且具有10 m/s的恒定速度。由于目标已经接近波束的高多普勒边缘,因此存在较大的运动方向,将目标置于外杂波区域中的多普勒高于杂波,而只有很小的运动方向将目标置于比杂波更低的多普勒。

由于使用相控阵从宽侧转向以及传感器框架围绕视线的任何滚动而导致的不对称波束宽度,使分析处理变得更加复杂。支持这种任意平台几何形状的物理仿真对于估计 MTI 系统的实际性能非常重要。
1.3 性能指标
虽然在MTI处理下目标可探测性的精确解决方案通常很复杂,但可以相对简单地计算几个有用的指标。最常引用的是最小可检测速度(MDV),即目标变得可检测的径向速度。该指标通常使用简化假设,即目标正好位于雷达瞄准镜上。对于最常见的宽侧轨迹,这也意味着可检测速度在正负范围速率上是对称的。检测所需的实际速度也会受到多普勒旁瓣控制杂波频谱的任何拓宽的影响。通常,必须在杂波频谱的拓宽和检测目标所需的旁瓣电平之间找到平衡。
二、宽边 MTI 仿真
在本节中,将了解如何配置雷达场景,以使用基本的宽侧轨迹模拟杂波和目标回波。将检查沿雷达瞄准镜(MDV 上方和下方)的目标的情况的结果范围剖面,然后查看当目标在交叉范围方向上偏移时会发生什么。
2.1 场景配置
涉及雷达杂波的仿真可以分四个步骤进行配置:
-
创建雷达模型并定义系统参数和物理安装角度
-
创建方案容器并定义地球类型、表面信息和模拟停止时间
-
创建场景平台,定义其轨迹并安装传感器
-
创建杂波发生器,为每个雷达定义杂波生成参数
2.2 配置雷达
该对象用于模拟信号级雷达回波。该雷达模型包含用于处理单基地雷达系统各种组件的子对象。首先定义所需的系统参数,然后使用提供的辅助函数构建雷达。使用适用于 X 波段侧视机载 MTI 雷达的参数,该雷达配置为检测在大约 20 到 40 英里/小时之间移动的表面目标。天线将是一个对称的均匀矩形阵列(URA)。
设置雷达安装参数。雷达将面向平台左侧(90度偏航),并以指定的俯角向下,没有围绕视线滚动。每次激活雷达模型时收集的脉冲总数由属性定义。通过仅范围的MTI处理,脉冲将以非相干方式积分。将脉冲数设置为 64。计算波长、多普勒和距离速率分辨率以及距离门中心供以后使用。范围范围从 0 扩展到明确的范围。
2.3 配置方案
创建一个对象。使用平坦的地球并将更新速率设置为 0,以指示更新速率应从场景中的传感器派生。
方案方法可用于定义具有关联反射率模型的均匀静态表面。使用函数创建恒定伽马反射率模型,并使用 -10 dBsm 的伽马值。
2.4 配置平台
创建雷达平台。让平台以指定的高度和速度飞行直线轨迹。平台将以 180 m/s 的速度向 +X 方向移动。创建一个沿天线视线位于表面上的目标平台,并为其提供速度矢量,以便返回信号与多普勒中的杂波分离。首先计算多普勒中杂波的预期扩散。实际上,多普勒旁瓣将超出此宽度,并且可以通过慢时间窗口来增加此宽度。MDV可以看作是这个宽度和MTI滤波器响应的函数。计算杂波的多普勒宽度。要沿天线瞄准镜放置目标,请根据雷达高度和视轴俯角计算所需的地面范围。回想一下,雷达指向 +Y 方向。
计算一个闭合速率,使目标比高多普勒杂波边缘大 500 Hz。使用辅助函数计算在 -Y 方向上移动的目标所需的速度,并创建运动轨迹。为了了解 MTI 滤波器对可检测性的影响,请用预期的杂波 RCS 来表示目标 RCS。NRCS可以使用之前创建的反射率模型找到,并且可用于近似包含目标的范围门和主瓣跨度内的杂波总RCS。以dBsm表示RCS。将目标 RCS 设置为比杂乱 RCS 小 8 dBsm。如果不进行任何处理,将无法检测到目标。
下图显示了此场景下的光束足迹,以及目标的位置和速度矢量。
 最后,创建并指定杂乱生成设置。将杂波分辨率设置为雷达距离分辨率的一半,以确保每个分辨率像元有多个杂波图块(距离分辨率小于此雷达配置的跨距离分辨率)。设置为 true 以生成主瓣杂波。
最后,创建并指定杂乱生成设置。将杂波分辨率设置为雷达距离分辨率的一半,以确保每个分辨率像元有多个杂波图块(距离分辨率小于此雷达配置的跨距离分辨率)。设置为 true 以生成主瓣杂波。
2.5 模拟杂波和目标返回信号
使用场景方法收集一个间隔的脉冲数据。结果被格式化为逐慢时间,称为相历史 (PH) 矩阵。该总波束是跨信道的典型雷达数据立方体的累积。输出将是一个单元数组,场景中每个单元对应一个单元。此场景只有一个雷达,因此通过访问第一个元素将 PH 解压缩到矩阵中。
使用提供的辅助功能使用MTI过滤器处理PH数据。生成的矩阵的格式将与原始PH矩阵类似,只是它已沿慢时间维度进行滤波,并且数据脉冲减少2个,以省略无效的初始滤波器输出。滤波器已按预期的噪声增益归一化,以便于比较结果。
将原始相历史矩阵与滤波矩阵一起绘制。
 在滤波后的相位历史记录中,目标回波在大多数脉冲的杂波上方可见。为了平均杂波和目标功率的微小波动,MTI系统通常会对滤波脉冲进行非相干积分,以形成最终的距离曲线。使用该函数从原始PH矩阵和过滤后的PH矩阵形成范围曲线。使用提供的辅助函数绘制范围曲线以及滤波器响应和指示目标范围和径向速度的注释。还显示了滤波前后的多普勒光谱。这些频谱是通过在所有距离门上累积每个多普勒箱中的功率来计算的。
在滤波后的相位历史记录中,目标回波在大多数脉冲的杂波上方可见。为了平均杂波和目标功率的微小波动,MTI系统通常会对滤波脉冲进行非相干积分,以形成最终的距离曲线。使用该函数从原始PH矩阵和过滤后的PH矩阵形成范围曲线。使用提供的辅助函数绘制范围曲线以及滤波器响应和指示目标范围和径向速度的注释。还显示了滤波前后的多普勒光谱。这些频谱是通过在所有距离门上累积每个多普勒箱中的功率来计算的。 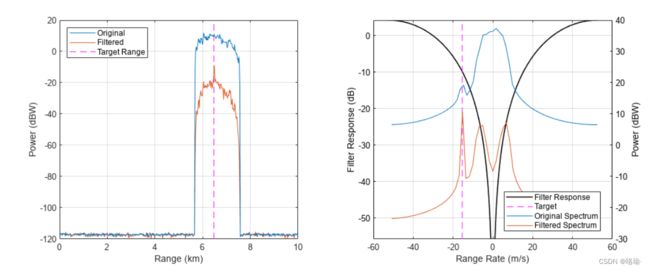
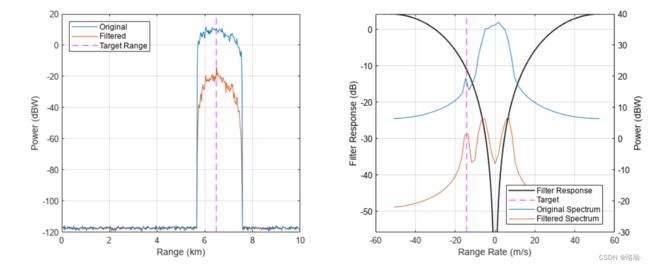
在原始范围配置文件中,无法在杂波中检测到目标回波。在过滤范围剖面中,目标范围内的峰值清晰可见。 目标与杂波边缘隔开 500 Hz。目标多普勒频率处的信号分量衰减约10 dB,而高多普勒边缘的杂波衰减约21 dB,这是主瓣杂波信号(不包括多普勒旁瓣)看到的最小衰减。滤波后,范围箱中的总杂波功率由信号衰减最小的分量主导,因此SCR的总增益至少为21-10=11 dB。由于杂波RCS仅比目标RCS大8 dBsm,因此SCR的增益足以检测目标。 现在调整目标速度,使其比杂波返回的高多普勒边缘低 50 Hz。
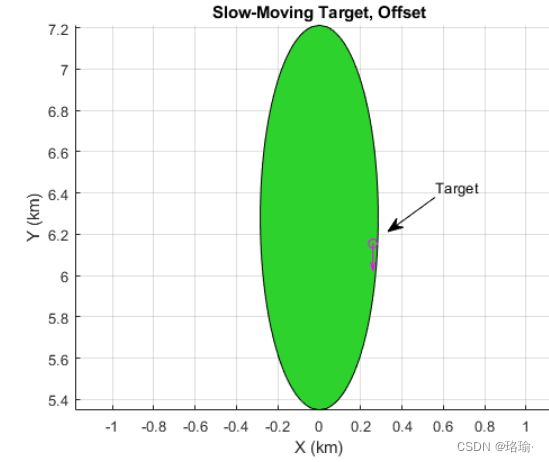
下图显示了这个缓慢移动目标的光束足迹。

使用提供的帮助程序函数重新运行方案并收集结果。绘制生成的范围分布图、滤波器响应和光谱图。

在这种情况下,目标信号不会从杂波信号的任何增益中受益,并且无法检测到。
2.6 偏移目标位置
现在,在不改变速度矢量的情况下,在 +X 方向上将目标从视线-地面交点偏移 260 m。因为这是雷达运动的方向,所以目标现在靠近杂波信号的高多普勒边缘。
下图显示了这个新的几何图形。
重复模拟并绘制结果。
虽然不像快速移动的目标那样突出,但由于目标在主瓣内的偏宽位置,可以看到与目标范围相对应的峰值。
现在,在目标仍然偏向杂波信号的高多普勒边缘的情况下,反转目标速度矢量的方向。

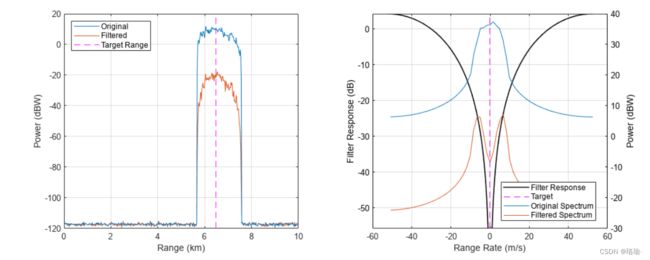
由于主瓣内目标位置及其速度矢量的相反影响,峰值再次消失。
三、斜视 MTI 模拟
在本节中,将模拟斜射束数据的MTI滤波,以检查整个范围内可检测速度的不对称性。斜视光束下的主瓣杂波将表现出倾斜:在范围内存在变化的多普勒质心。如果在所有范围门上使用单个MTI滤波器,这意味着滤波器的有效性可能会随量程而变化。
雷达属性可用于旋转雷达框架,以便根据需要指向视线。俯角将保持不变。使用向前斜视的轨迹。松开雷达并设置安装角度。
获取天线瞄准器方向,以及用于沿同一方向在地面上放置目标的地面投影瞄准器矢量。根据视线矢量计算近似范围和多普勒杂波质心。这将用于将目标放置在相对于杂波的距离和多普勒处。选择一个收敛速率,使目标高于计算的杂波质心 200 Hz。沿视线矢量放置第一个目标平台(如上一节),计算所需的速度矢量,并更新轨迹属性。创建第二个平台,并将其沿视线方向再放置 800 m,并赋予其相同的关闭速率。
下图显示了光束足迹、目标及其速度矢量的位置。

运行仿真并绘制生成的范围剖面、滤波器响应和光谱。
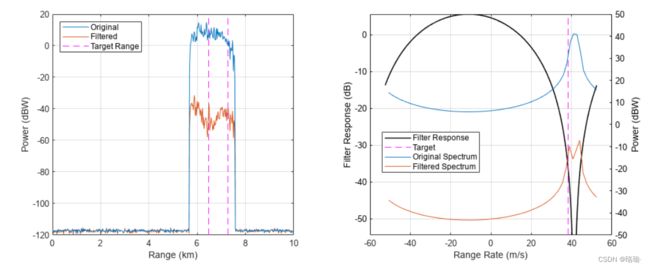
对范围剖面的第一个重要观察是围绕中心范围的拐点。杂波回波的低范围和高范围侧与多普勒质心的偏移量大于宽边情况,并且衰减低于质心处的衰减。因此,该范围内的目标信号在滤波数据中可见。更大范围内的第二个目标不可见,因为该范围内的杂波返回也没有衰减。 请注意,在这种情况下,虽然目标1和2的平台分别以约18和7 m/s的速度移动,但它们的关闭速率都足够大(约172 m / s)模糊不清,看起来好像它们正在以大约40 m / s的速度远离雷达。这种范围速率模糊通常可以通过使用多个PRF或将测量值馈送到跟踪器来解决。 为了更好地查看距离对杂波多普勒光谱的依赖性,请使用提供的辅助函数在滤波前后绘制全距离多普勒图(RDM)。显示的区域将在 4 到 9 公里范围和 -3.5 到 -2 kHz 之间,以便更清楚地查看数据。

从RDM可以看出,在第一个目标范围内(约6.5公里)的大部分杂波信号在目标信号功率以下衰减,而第二个目标范围内的杂波信号没有衰减。
四、结论
在此示例中,了解了如何配置雷达场景以生成适合模拟 MTI 性能的目标和杂波返回。证明了在宽侧和斜侧收集期间目标放置和主瓣运动方向的影响。
五、程序
使用Matlab R2022b版本,点击打开。

打开下面的“GenerateClutterAndTargetReturnsForMTIRadarExample.mlx”文件,点击运行,就可以看到上述效果。

下载方法一:基于MTI雷达生成表面杂波和目标回波(Matlab程序).rar
下载方法二:
关注下面公众号,后台回复关键词:MTI雷达生成表面杂波和目标回波,发送源码链接。