使用wandb/tensorboard管理、可视化卷积神经网络训练日志
文章目录
- wandb
-
- 训练参数配置
- 数据记录
-
- 硬件情况记录
- 数值记录
- 参数分布记录
- 特征图记录
- tensorboard
-
- 数据记录
-
- 硬件数据
- 数值记录
- torchsummary
wandb
##安装注册
安装wandb库,输入wandb login命令获取API key(40位),或直接输入命令wandb login your_API_key登录个人wandb账号
pip install wandb
wandb login
训练参数配置
在wandb.init函数中指定项目名、团队名(可省略,注意项目对团队的权限)和训练参数,这些训练参数在wandb记录的日志中可以查看,方便直观地分析不同训练中参数的调整及其影响,也可以编辑每一个训练日志的Name和Notes对其进行标记。
wandb.init(project="pytorch-intro", # project_name
entity="neverbackdown", # team_name
config={ # training_config
"learning_rate": 0.01,
"batch_size": 16,
"val_batch_size": 16,
"freeze_epochs": 50,
"epochs": 200,
"depth": 50,
"lr": 1e-5,
"momentum": 0.1,
"no_cuda": False,
"seed": 42,
"log_interval": 10,
})
wandb.watch_called = False
config = wandb.config # Initialize config
数据记录
硬件情况记录
wandb自动记录硬件数据,如GPU使用率、磁盘访问等,可用于分析性能瓶颈。
数值记录
每一代训练结束后记录train_loss,验证结束后记录precision、recall、valid_loss等参数,并保存wandb日志文件和权重文件。
wandb.log({"epoch": epoch+1})
# after training
wandb.log({"training loss": np.mean(loss_hist)})
# after validation
wandb.log({'val loss': float(classification_loss + regression_loss),
'mAP': float(mAP),
'precision': float(precision),
'recall': float(recall)
})
# save weights.pt
torch.save(retinanet.module.state_dict(), f'logs/weights/{dataset_name}_retinanet_rotate_{epoch_num}.pt') # only paras
torch.save(net.module, f'logs/weights/{dataset_name}_pre-retinanet_rotate_jitter_labelsmooth_{epoch_num}.pt') # whole module
wandb.save(f'model_{epoch_num}.h5')
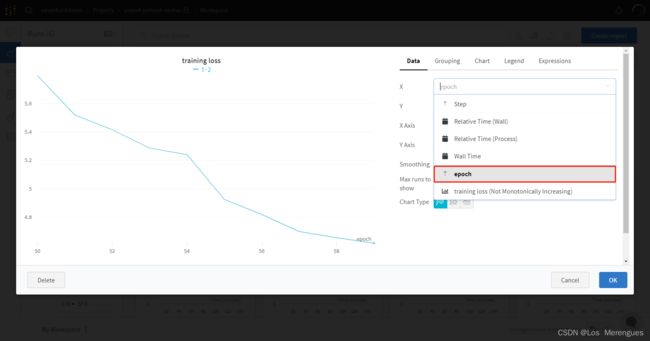
中断训练的损失函数查看方式
当训练中断或需要从指定epoch开始重新训练时,wandb默认的损失函数图横坐标为step,即从0开始绘制,无法直观看出损失函数的连续变化。解决办法是保存epoch值(代码第一行),并edit panel将横坐标改为epoch,即可按epoch查看损失函数。
参数分布记录
wandb.watch(model, log="all") # 观察所有参数
特征图记录
采用register_forward_pre_hook(hook: Callable[..., None])函数实现,括号中的参数是一个函数名,暂且称之为hook_func,函数内容需要自行实现。其参数module, input, output固定,分别代表模块名称、一个tensor组成的tuple输入和tensor输出。关于该函数详细解释可参考博文。
由于hook_func参数固定,故定义get_image_name_for_hook函数为不同特征图命名,并定义全局变量COUNT表示特征图在网络结构中的顺序。具体实现如下。
COUNT = 0 # global_para for featuremap naming
IMAGE_FOLDER = './save_image'
INSTANCE_FOLDER = None
def hook_func(module, input, output):
image_name = get_image_name_for_hook(module)
data = output.clone().detach().permute(1, 0, 2, 3)
# torchvision.utils.save_image(data, image_name, pad_value=0.5)
from PIL import Image
from torchvision.utils import make_grid
grid = make_grid(data, nrow=8, padding=2, pad_value=0.5, normalize=False, range=None, scale_each=False)
ndarr = grid.mul_(255).add_(0.5).clamp_(0, 255).permute(1, 2, 0).to('cpu', torch.uint8).numpy()
im = Image.fromarray(ndarr)
# wandb save from jpg/png file
wandb.log({f"{image_name}": wandb.Image(im)})
# save locally
# im.save(image_path)
def get_image_name_for_hook(module):
os.makedirs(INSTANCE_FOLDER, exist_ok=True)
base_name = str(module).split('(')[0]
image_name = '.' # '.' is surely exist, to make first loop condition True
global COUNT
while os.path.exists(image_name):
COUNT += 1
image_name = '%d_%s' % (COUNT, base_name)
return image_name
if __name__ == '__main__':
# clear output folder
if os.path.exists(IMAGE_FOLDER):
shutil.rmtree(IMAGE_FOLDER)
# TODO: wandb & model initialization
model.eval()
# layers to log
modules_for_plot = (torch.nn.LeakyReLU, torch.nn.BatchNorm2d, torch.nn.Conv2d)
for name, module in model.named_modules():
if isinstance(module, modules_for_plot):
module.register_forward_hook(hook_func)
index = 1
for idx, batch in enumerate(val_loader):
# global COUNT
COUNT = 1
INSTANCE_FOLDER = os.path.join(IMAGE_FOLDER, f'{index}_pic')
# forward
images_val = Variable(torch.from_numpy(batch[0]).type(torch.FloatTensor)).cuda()
outputs = model(images_val)
tensorboard
数据记录
硬件数据
命令行输入nvidia-smi查看GPU使用情况,或在 任务管理器(Ctrl+Alt+Delete)-性能 中查看。
数值记录
每一代训练结束后记录train_loss,验证结束后记录precision、recall、valid_loss等参数,并保存权重文件。
def train(model, yolo_loss, epoch, writer):
# after train
writer.add_scalars('Train/loss', {'total loss': float(loss),
'classification loss': float(classification_loss),
'regression loss': float(regression_loss)}, epoch_num)
# after valid
writer.add_scalars('Validation/loss', {'classification_loss': float(classification_loss),
'regression_loss': float(regression_loss),
'total_loss': float(classification_loss + regression_loss)}, epoch_num)
writer.add_scalar('Validation/mAP', float(mAP), epoch_num)
writer.add_scalars('Validation/PR_curve', {'precision': float(precision),
'recall': float(recall)}, epoch_num)
# save weights.pt
torch.save(retinanet.module.state_dict(), f'logs/weights/{dataset_name}_retinanet_rotate_{epoch_num}.pt') # only paras
torch.save(net.module, f'logs/weights/{dataset_name}_pre-retinanet_rotate_jitter_labelsmooth_{epoch_num}.pt') # whole module
if __name__ == "__main__":
log_writer = SummaryWriter('logs/tensorboard/FPN/')
train(model, yolo_loss, epoch, log_writer)
在SummaryWriter记录的文件夹父目录下用命令行打开tensorboard查看训练日志。
tensorboard --logdir "log_filepath"
torchsummary
可以在网络定义文件的main函数里查看网络结构,包括每一层的输出尺寸、参数量和网络总参数量等。
from torchsummary import summary
if __name__ == "__main__":
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = YoloBody(9, 3).cuda()
summary(model, input_size=(3, 416, 416))